
Design and Experimental Characterization of Artificial Neural Network Controller for a Lower Limb Robotic Exoskeleton

Abstract
:1. Introduction
2. Rehabilitation System Architecture
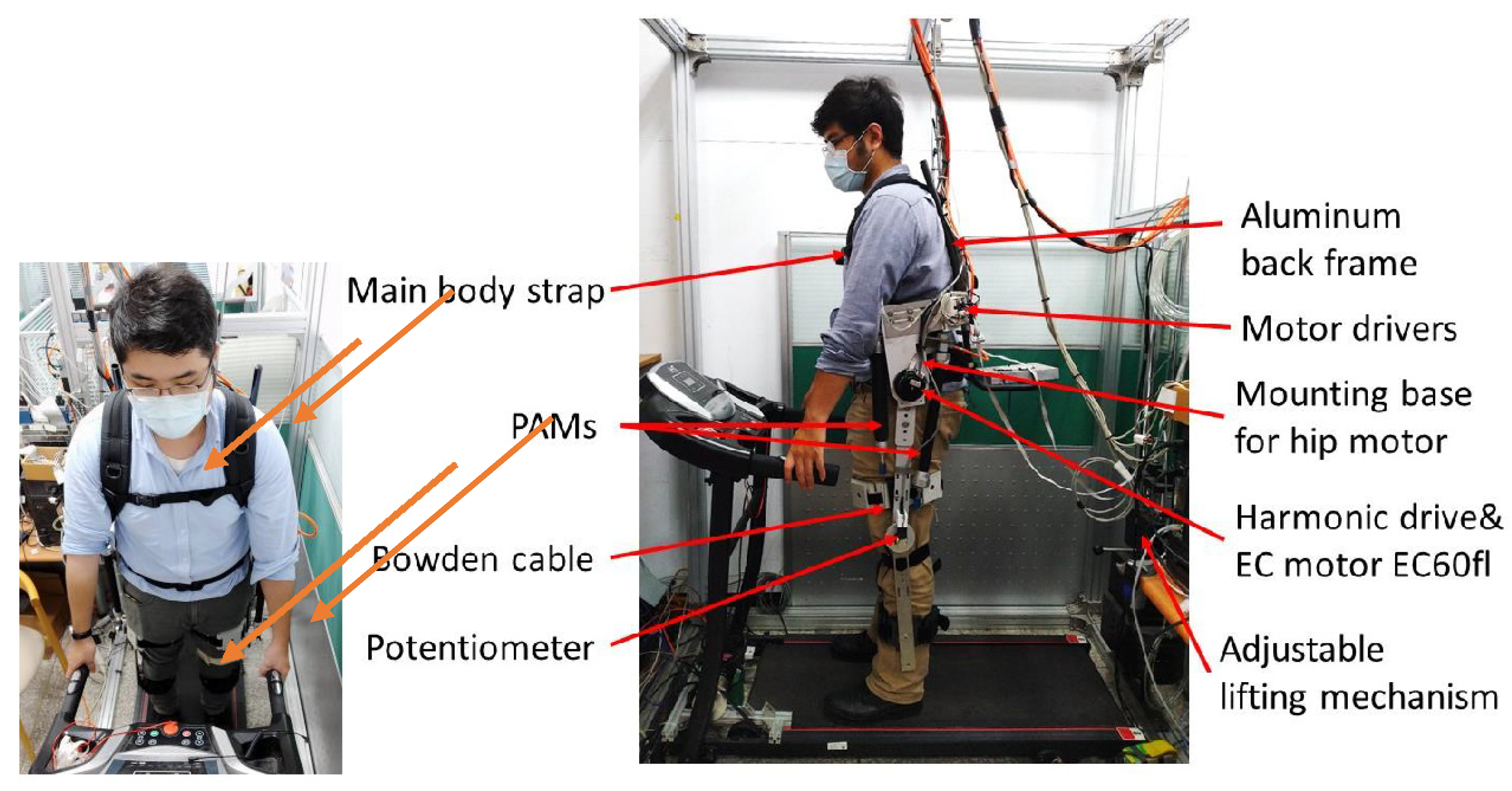
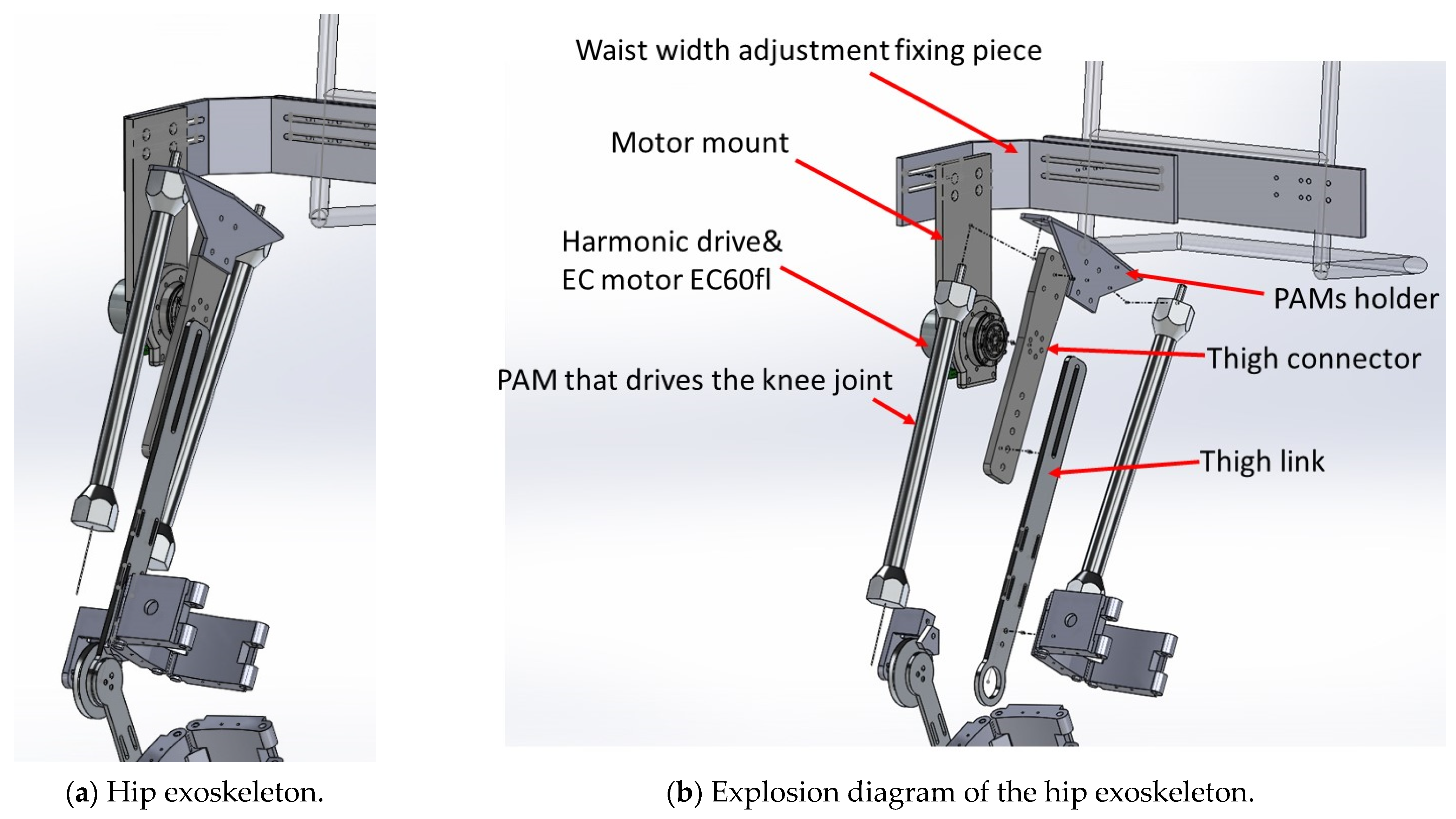
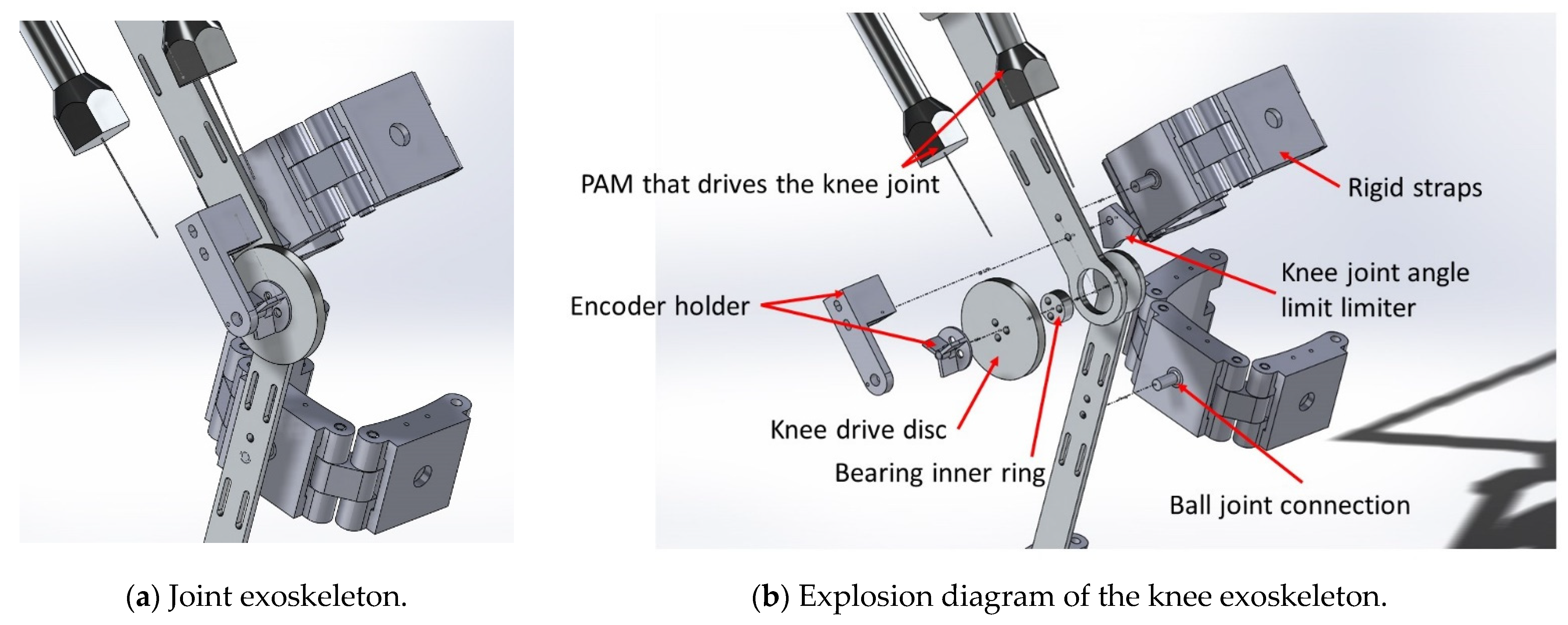
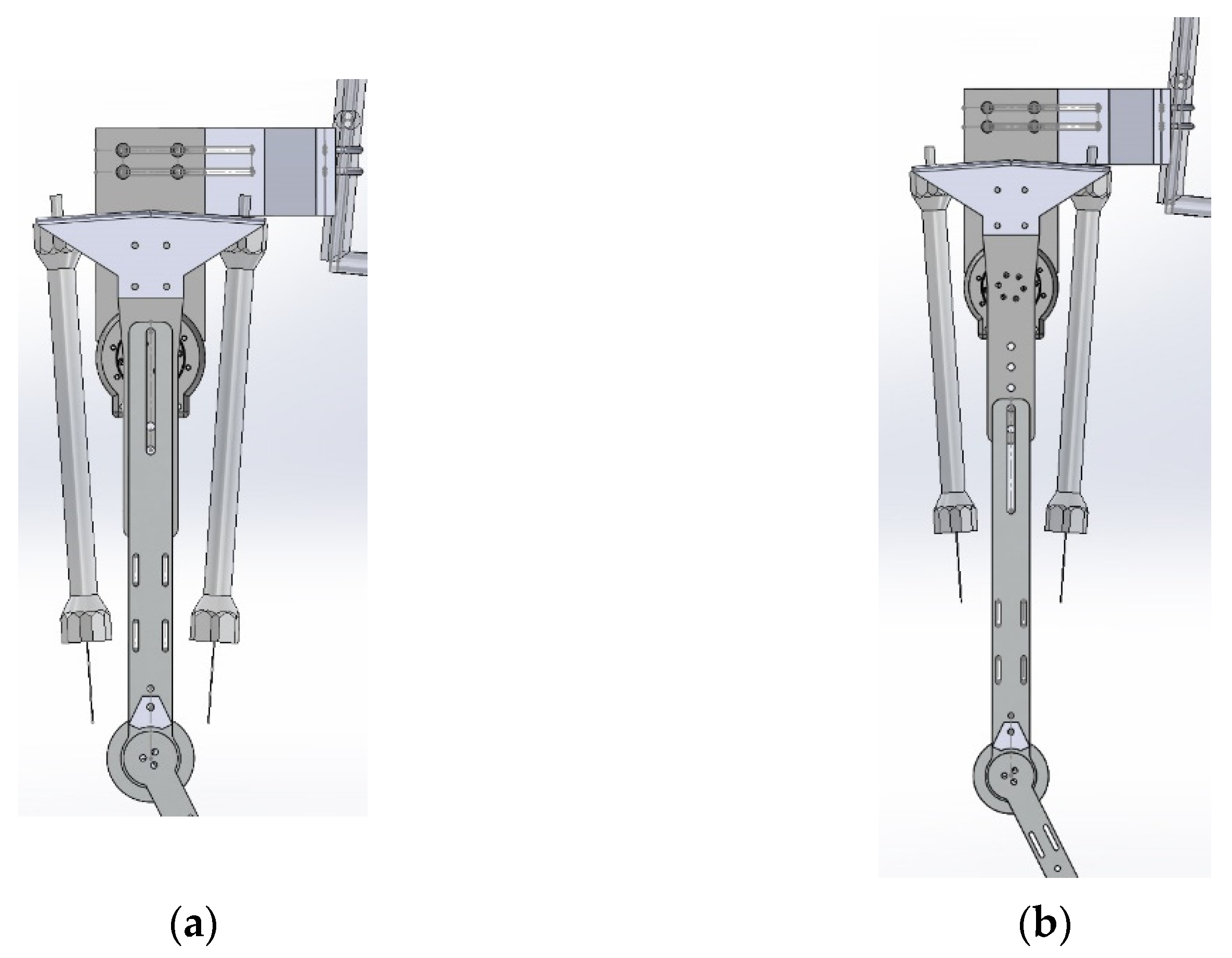
2.1. Design of the Lower Limb Robotic Exoskeleton
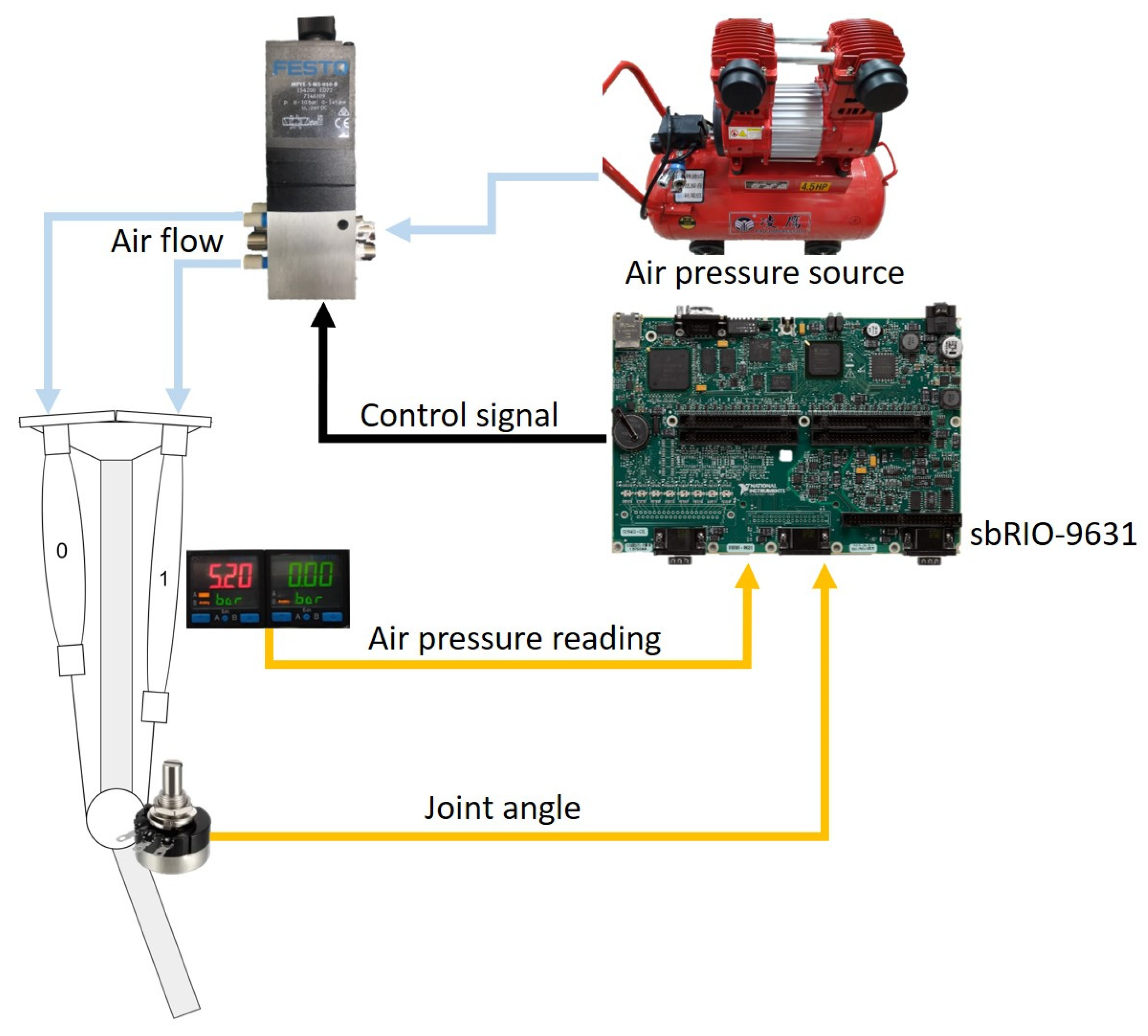
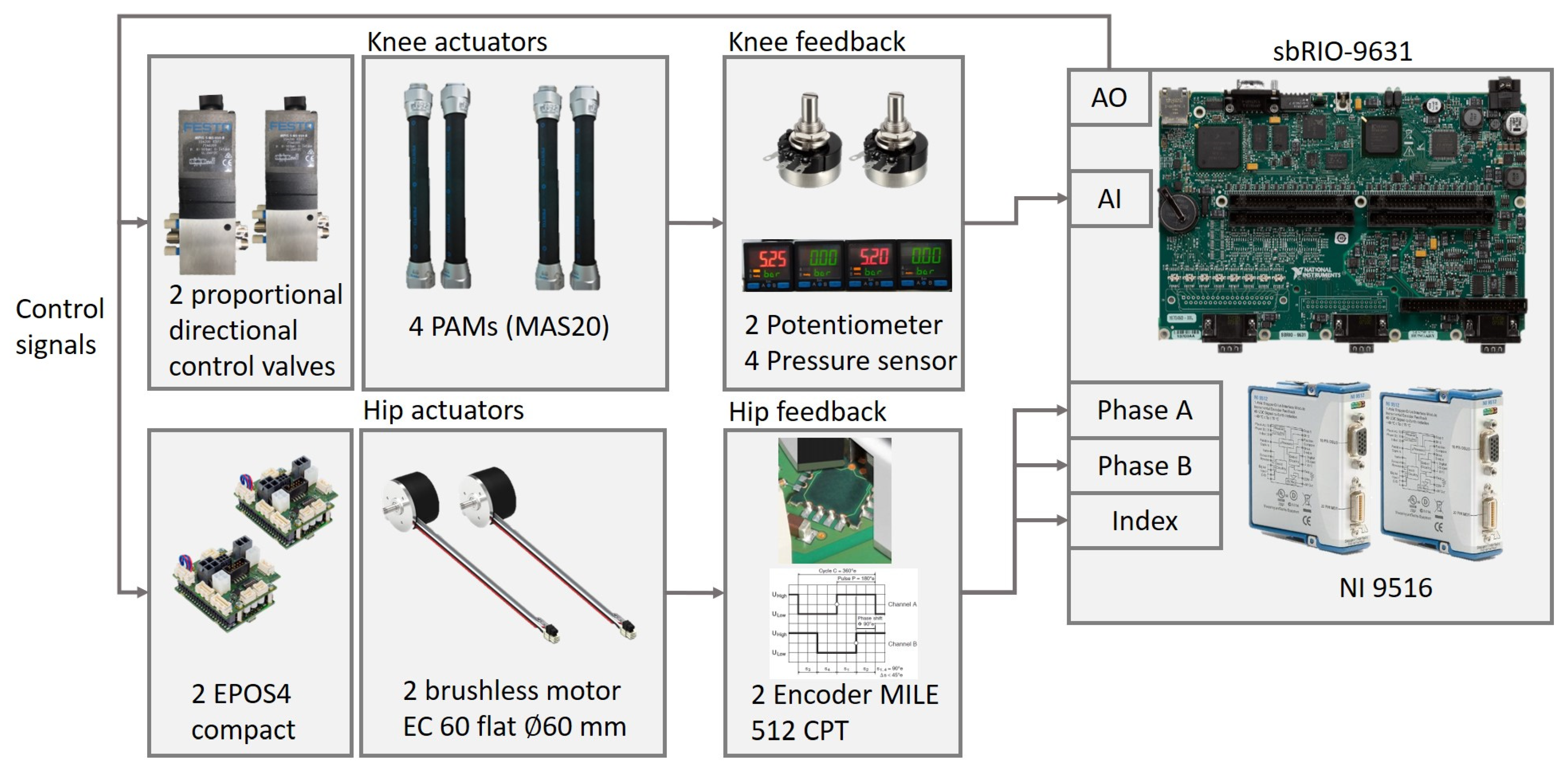
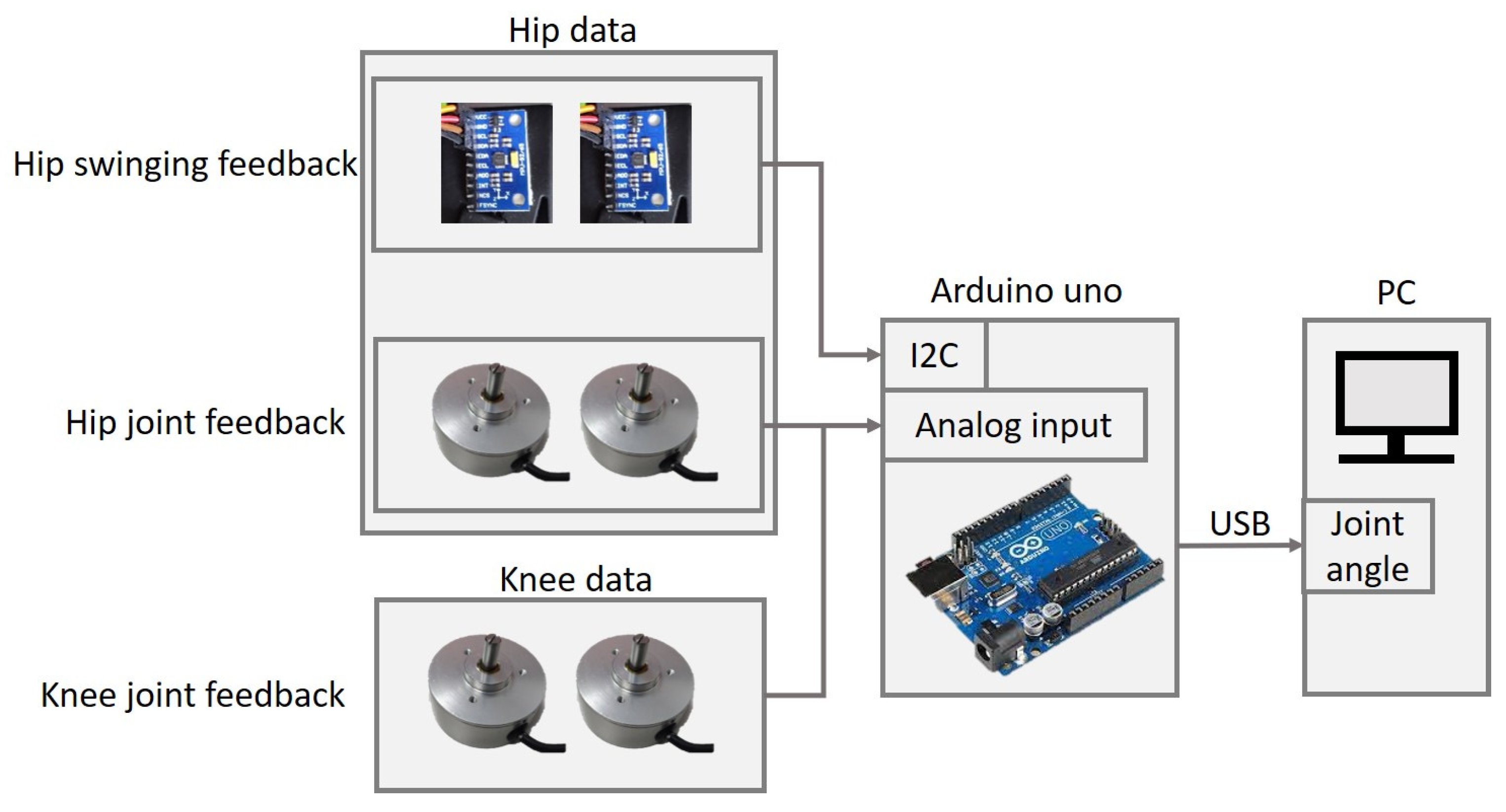
2.2. Electromechanical System of Powered Lower Limb Rehabilitation Exoskeleton Robot
3. LLRER Controller Design
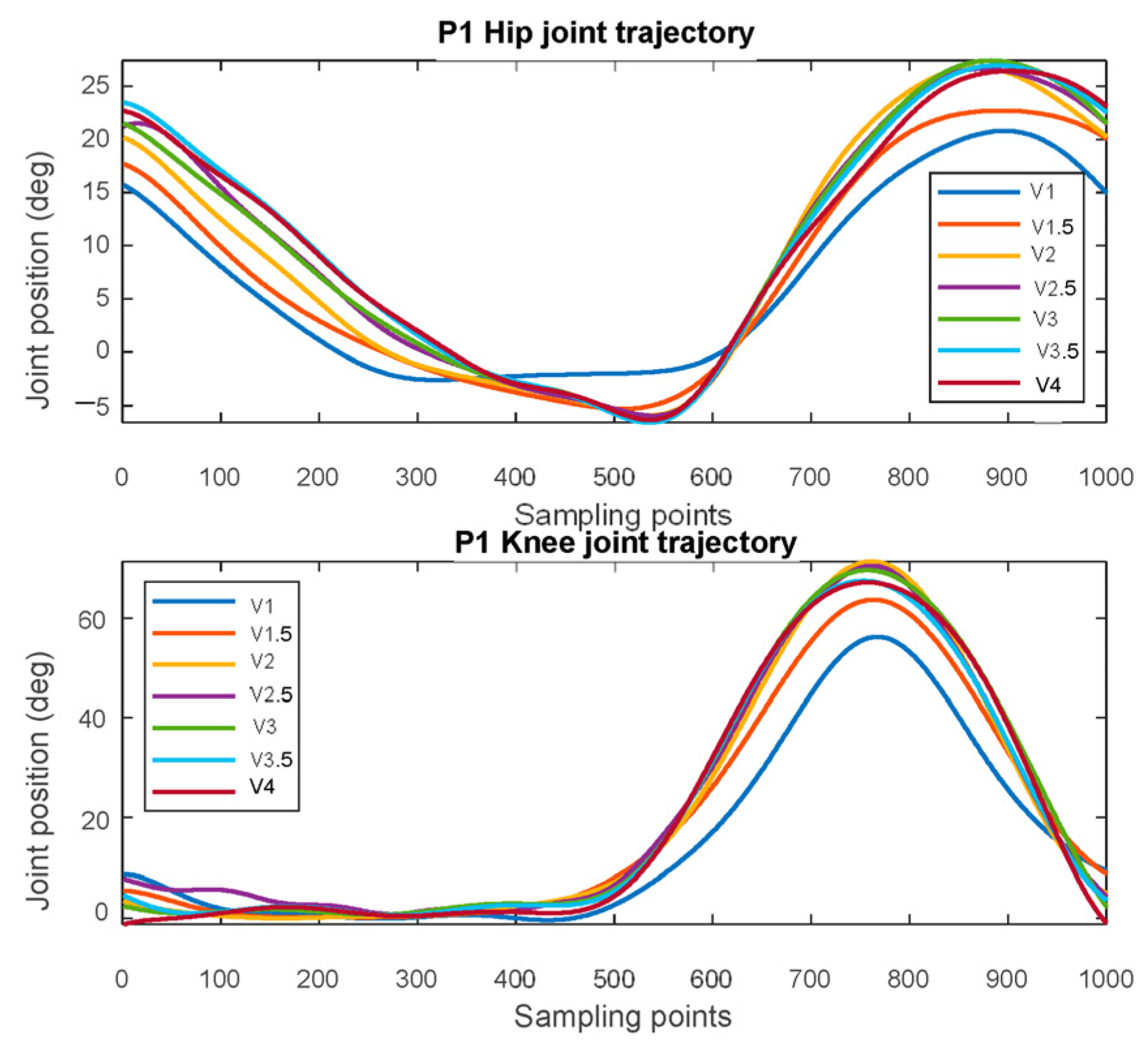
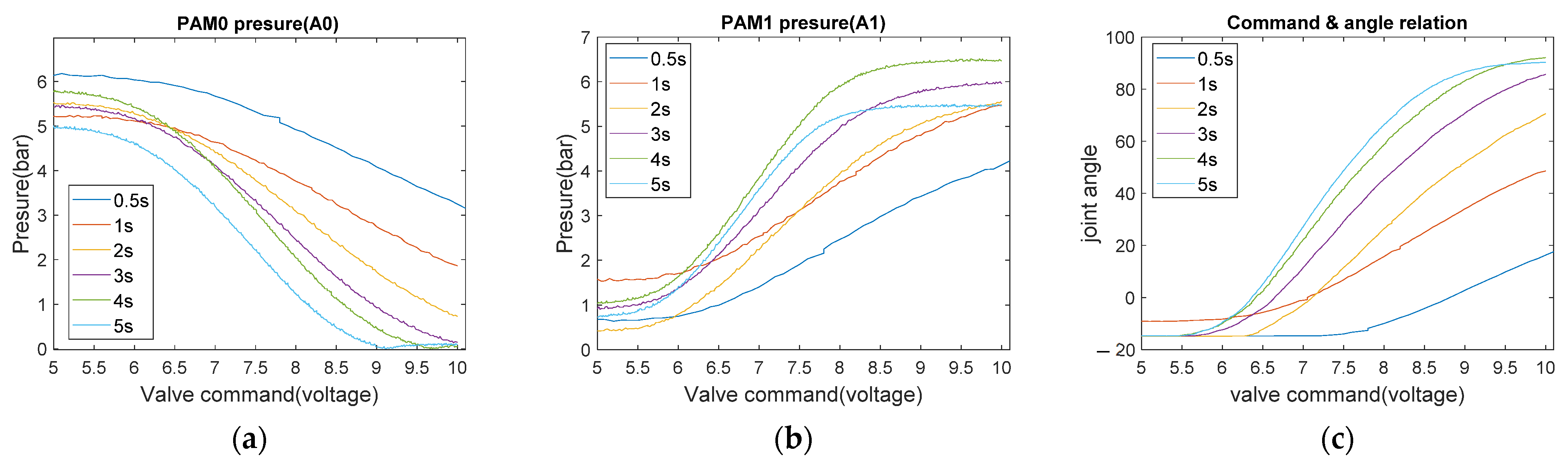
3.1. Gait Model Acquisition
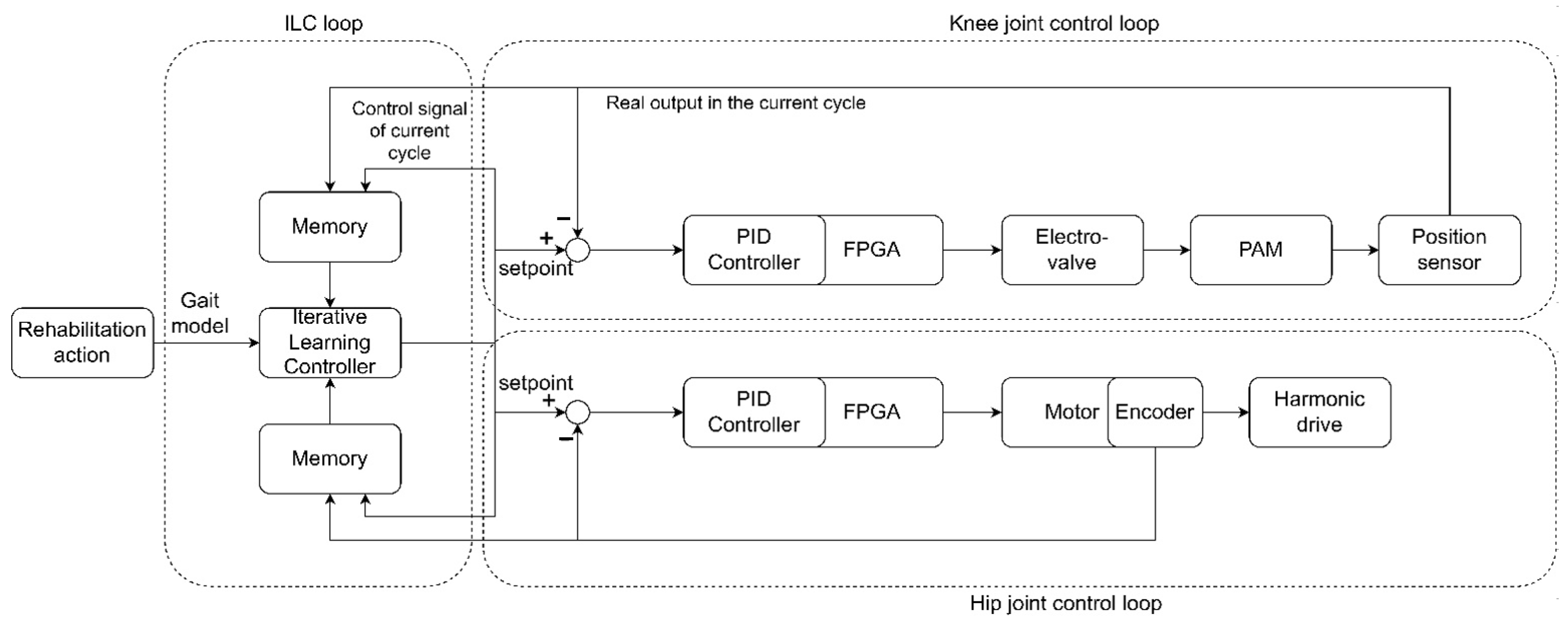
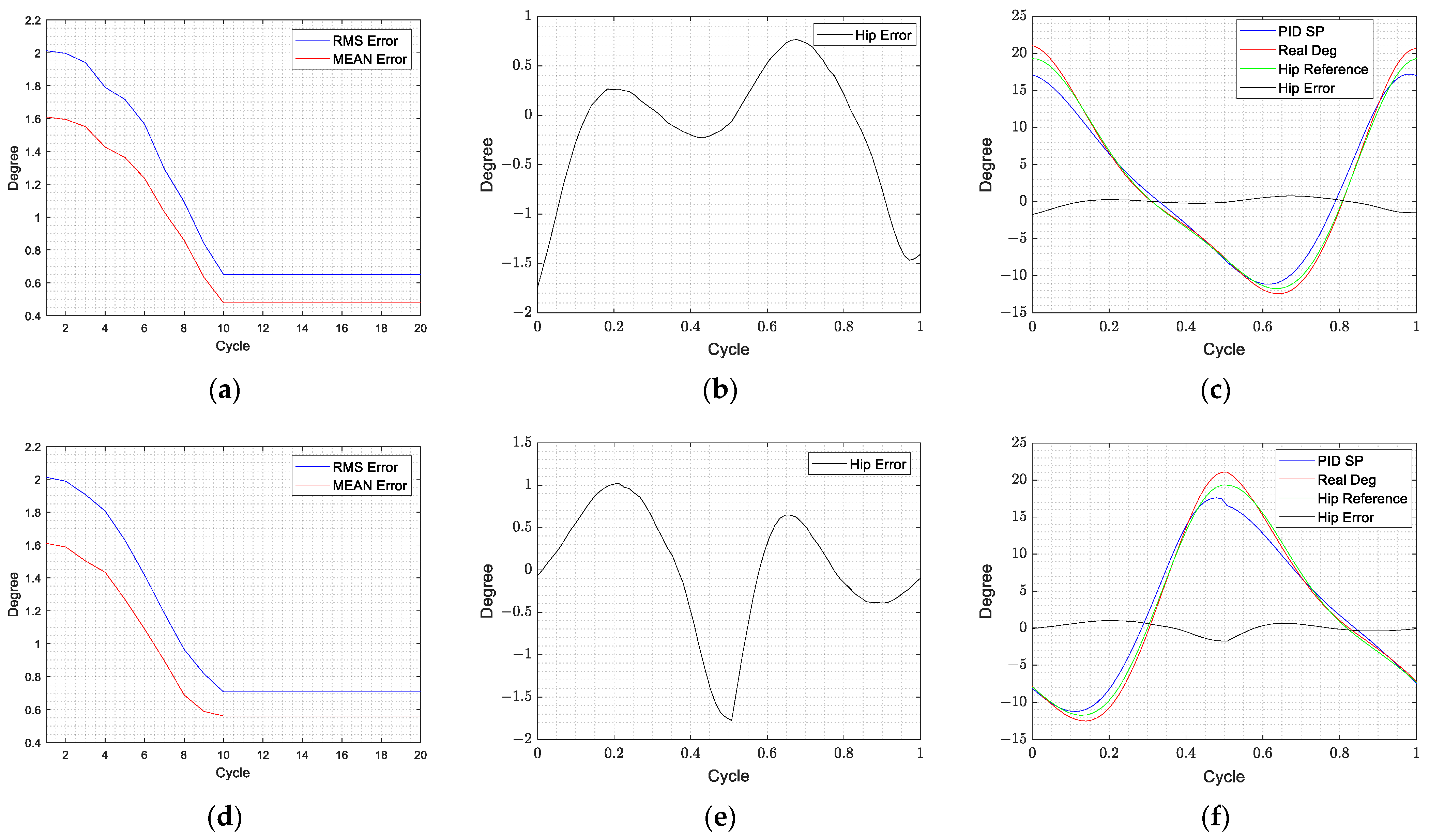
3.2. Iterative Learning Control for the LLRER
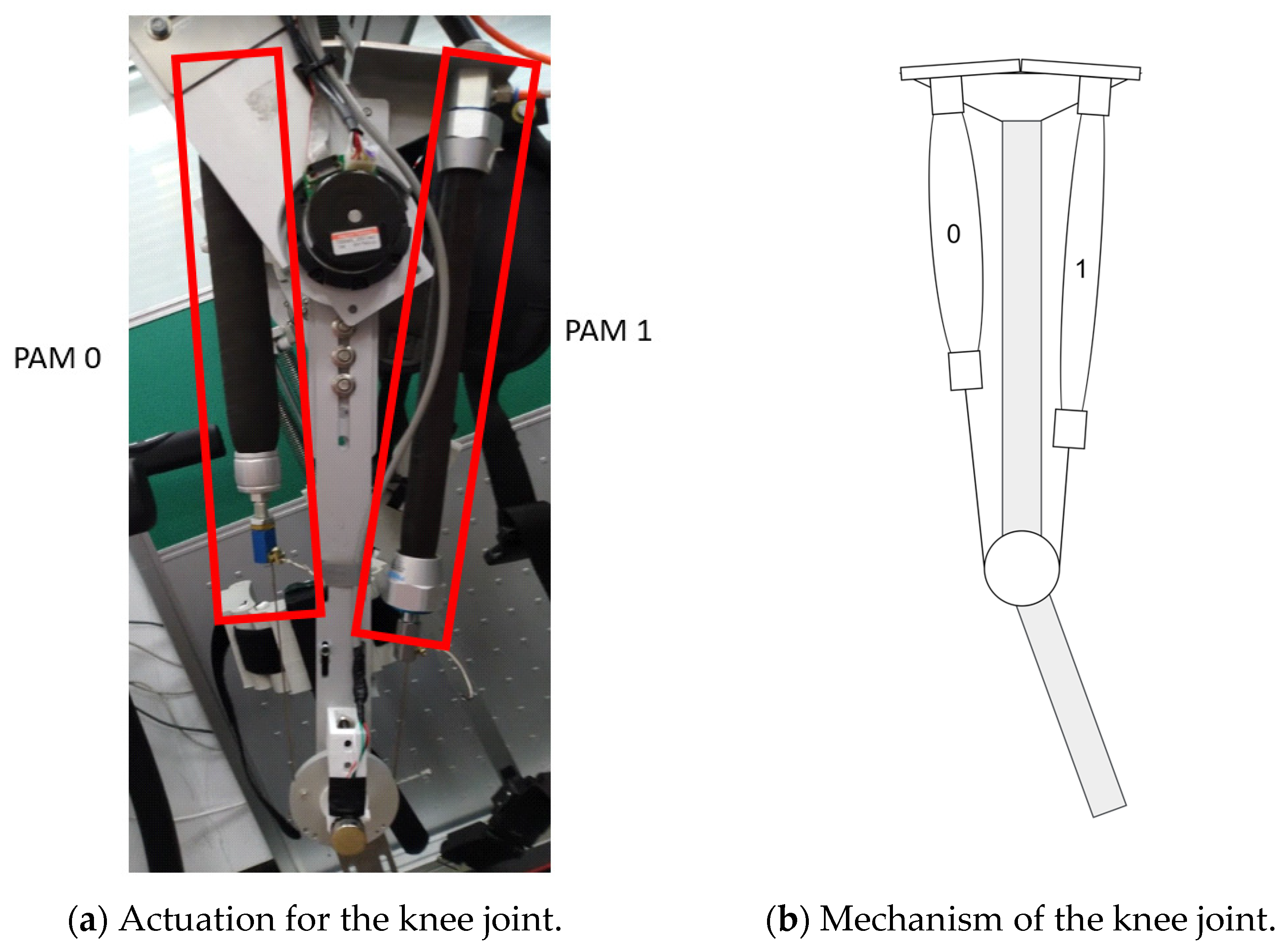
4. Design of the Feedback Controller for the Knee Joint
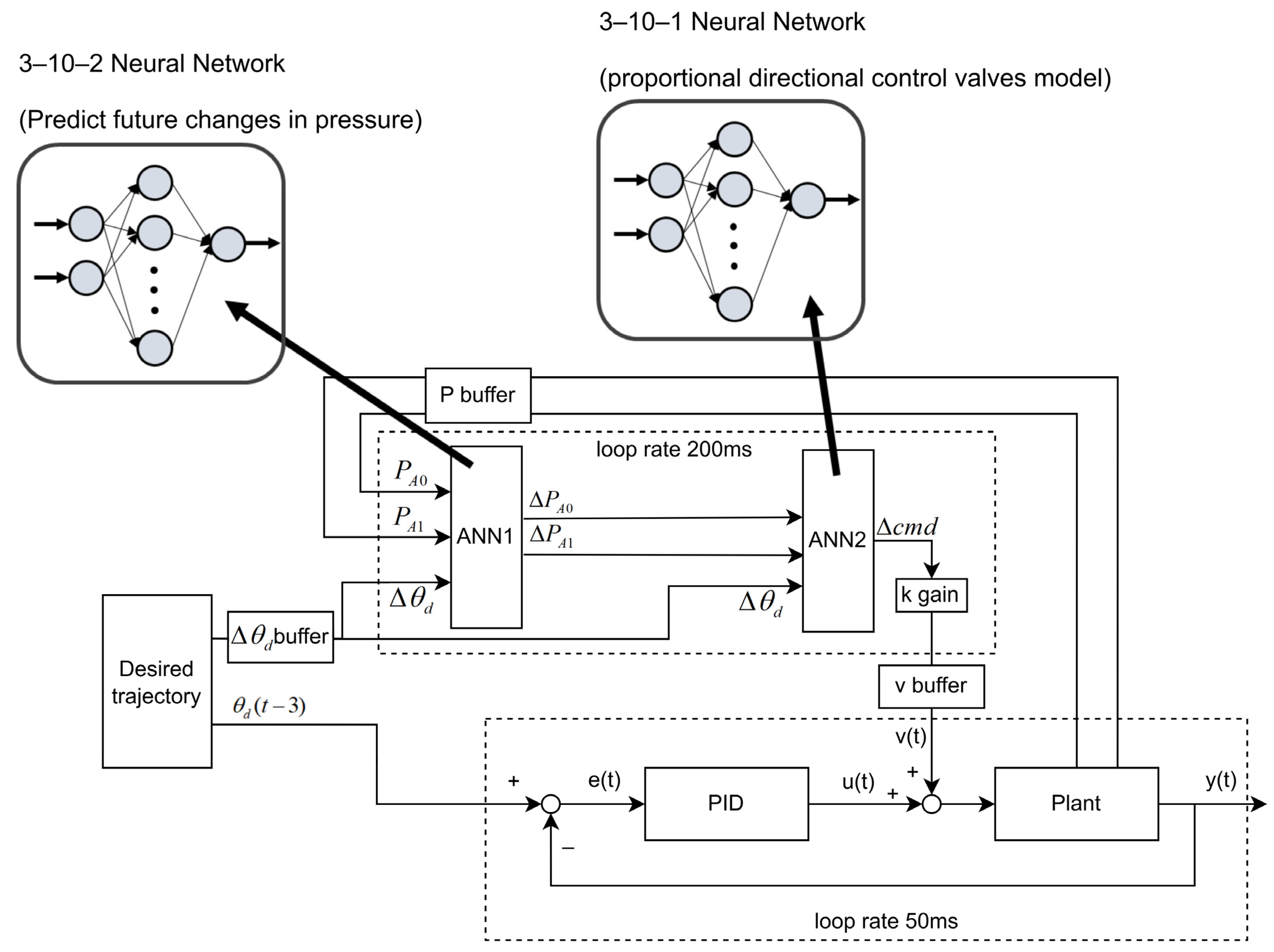
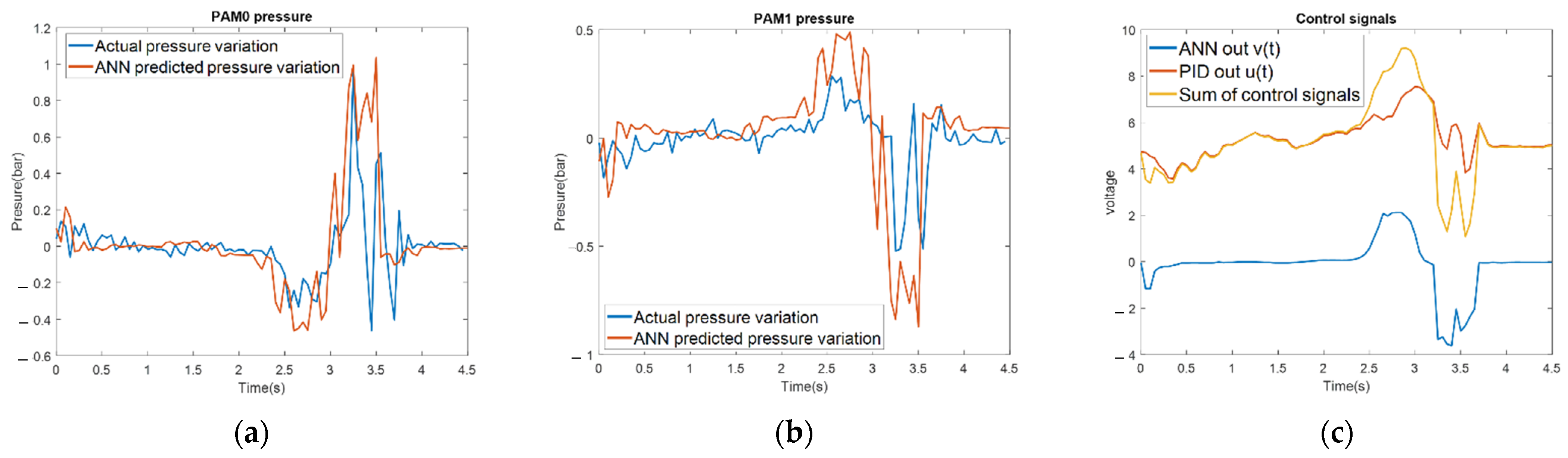
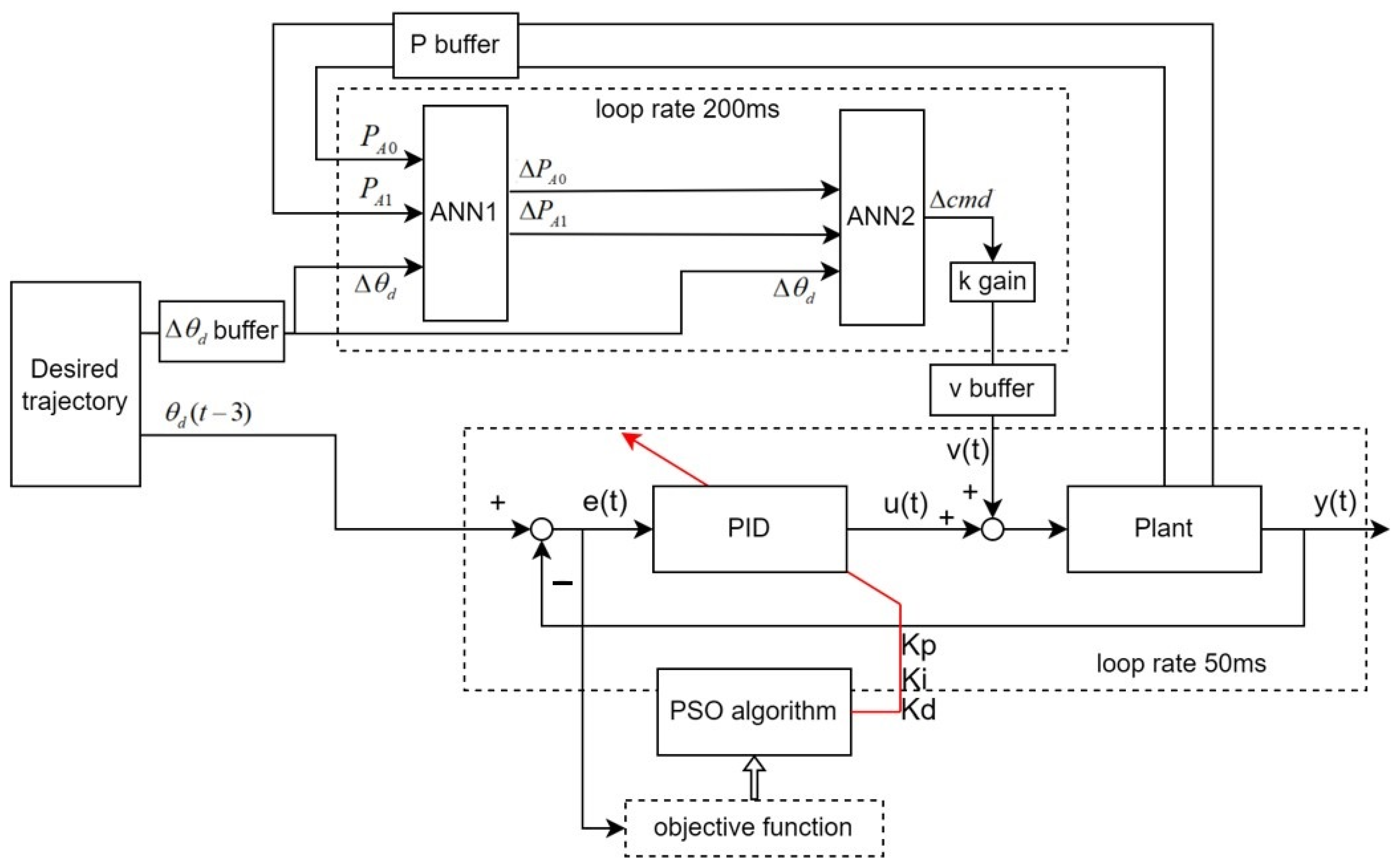
4.1. Feedforward Artificial Neural Network (ANN) with the Inverse Model
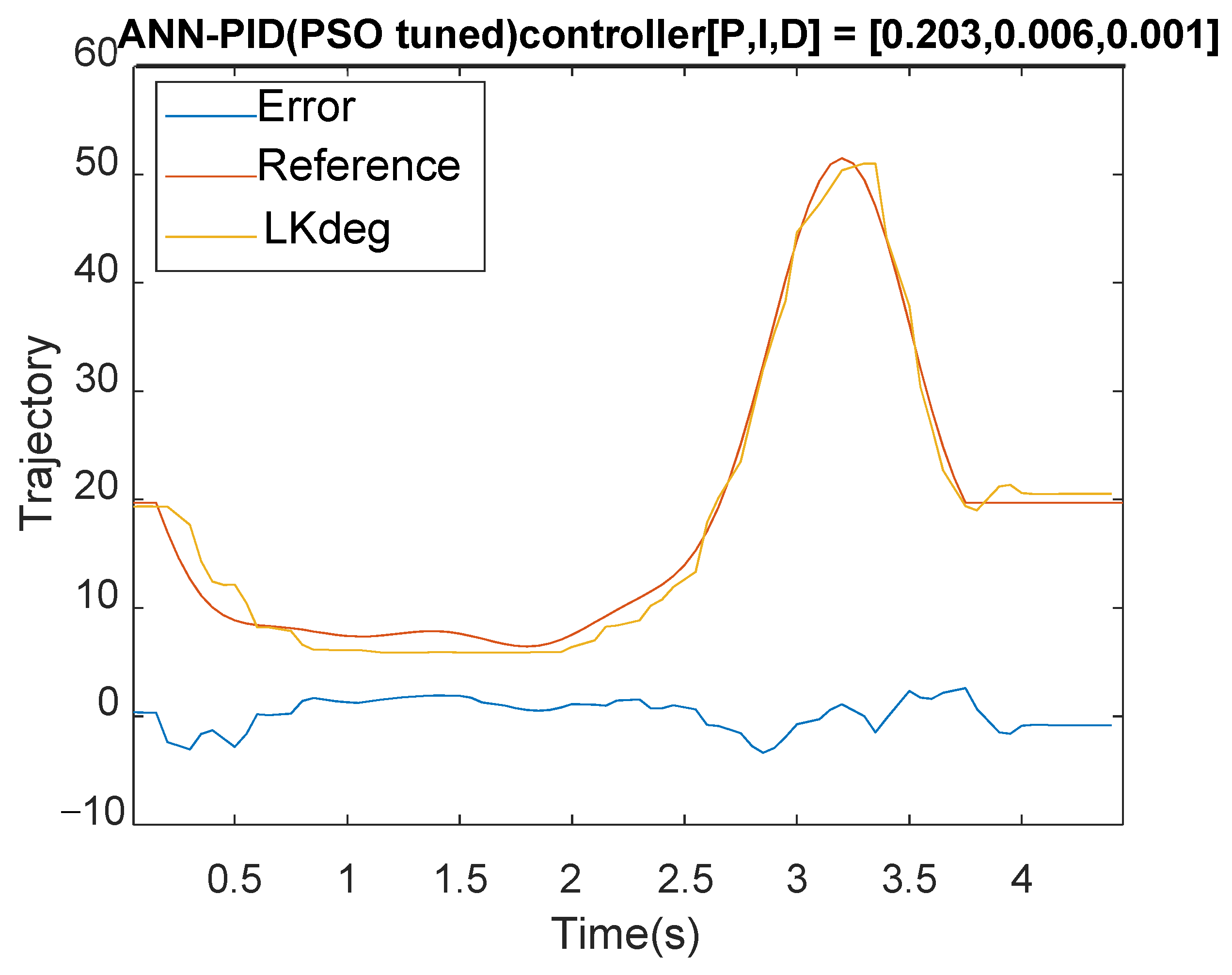
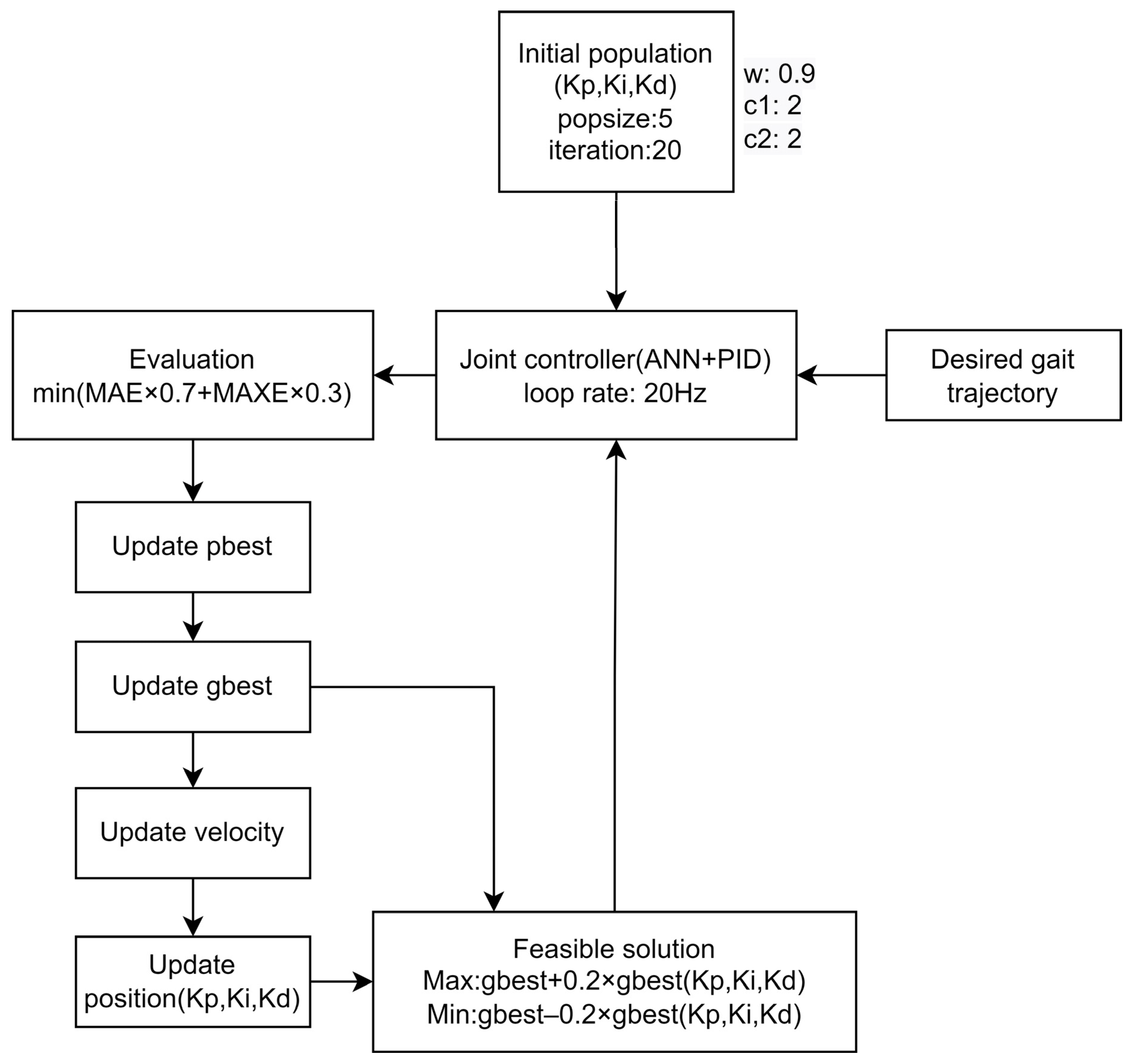
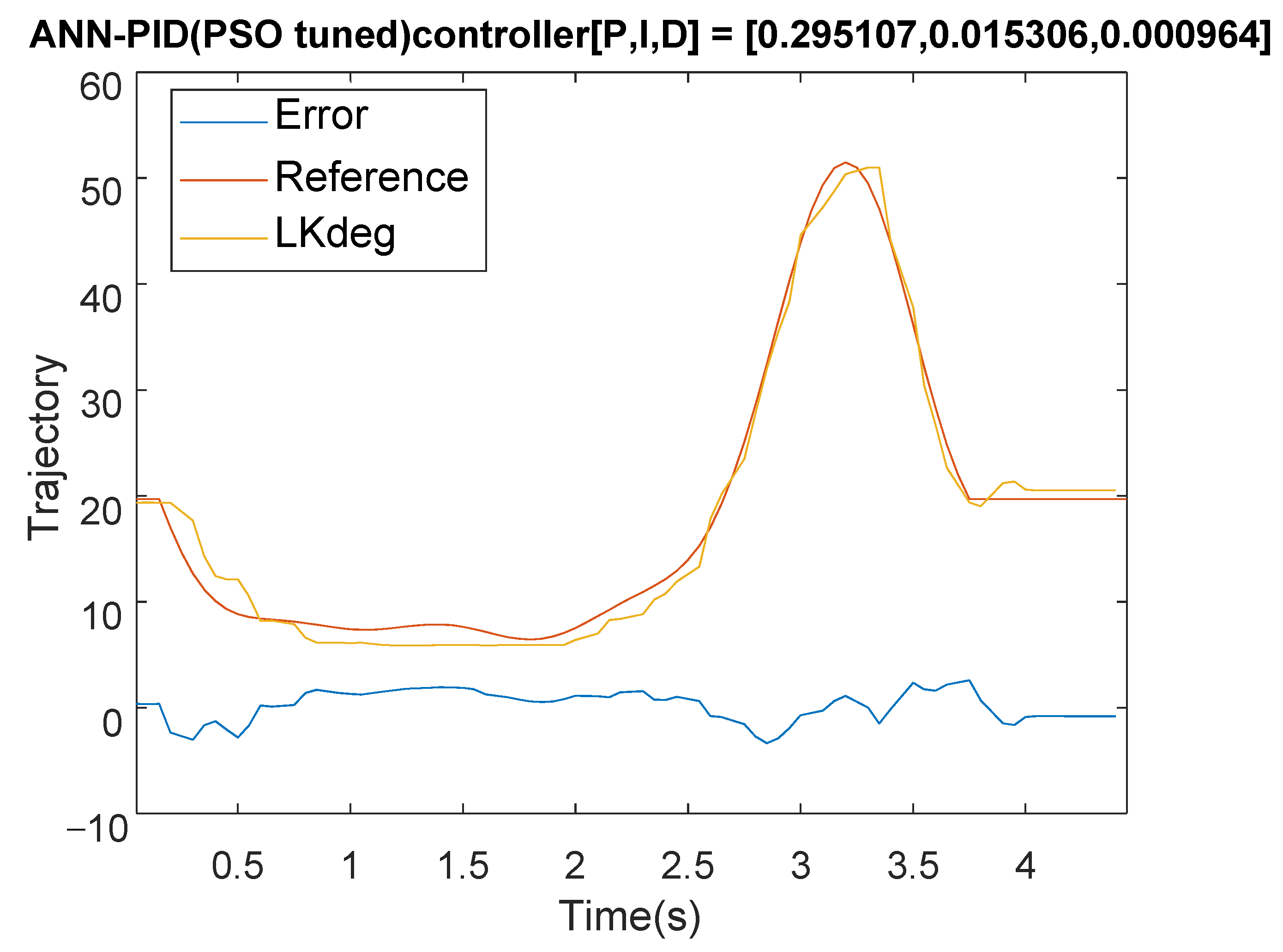
4.2. PSO Tuned PID with ANN Feedforward Control
5. Experiment and Discussion
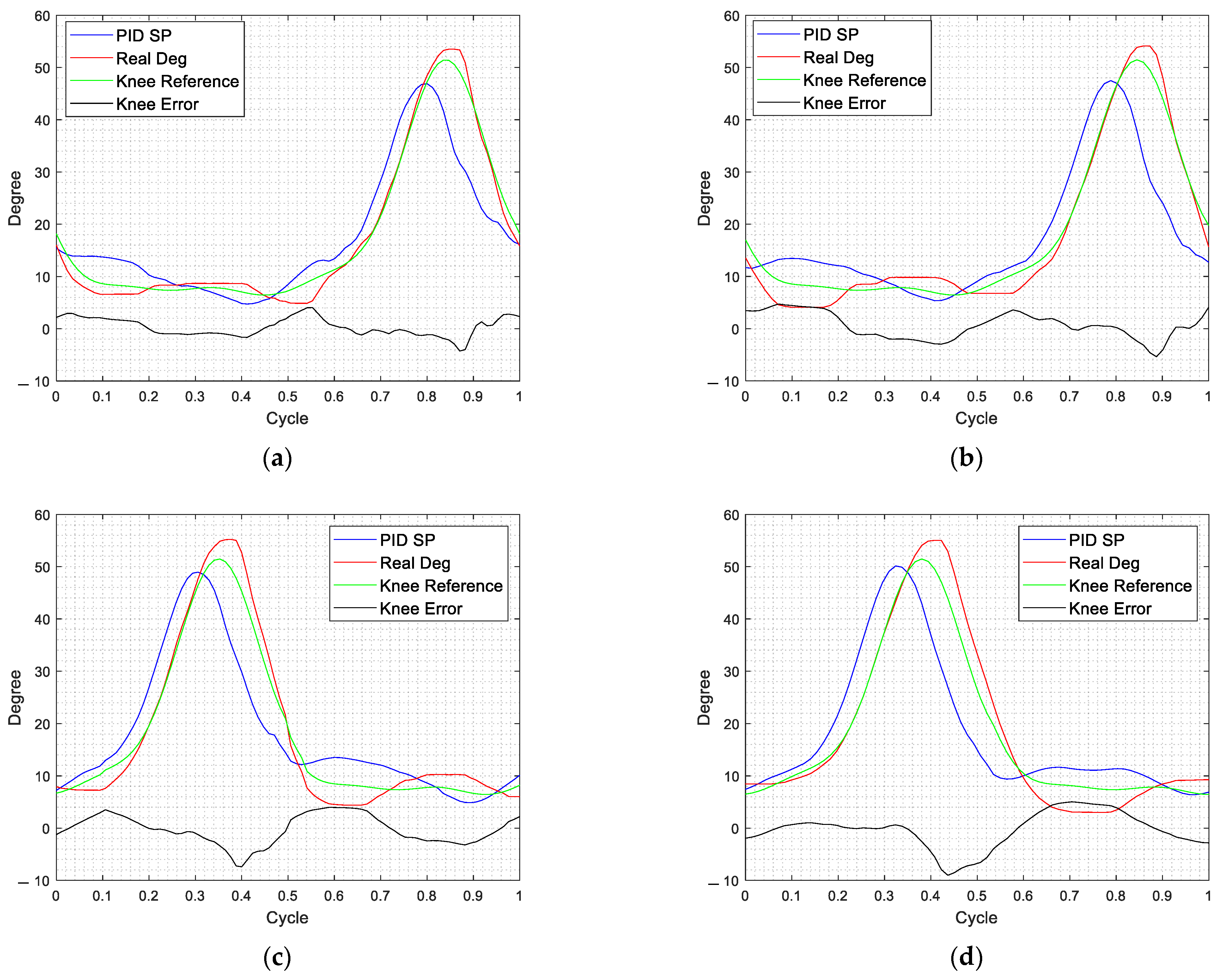
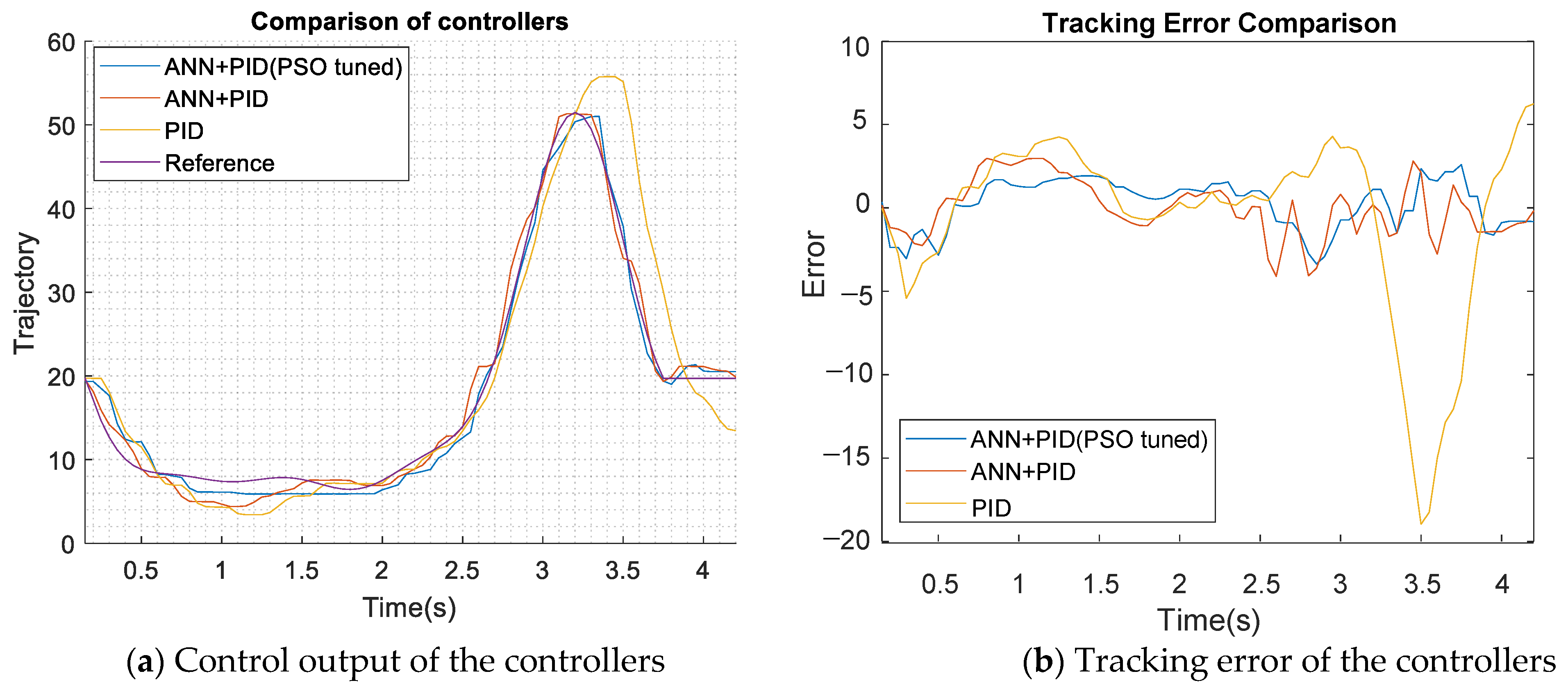
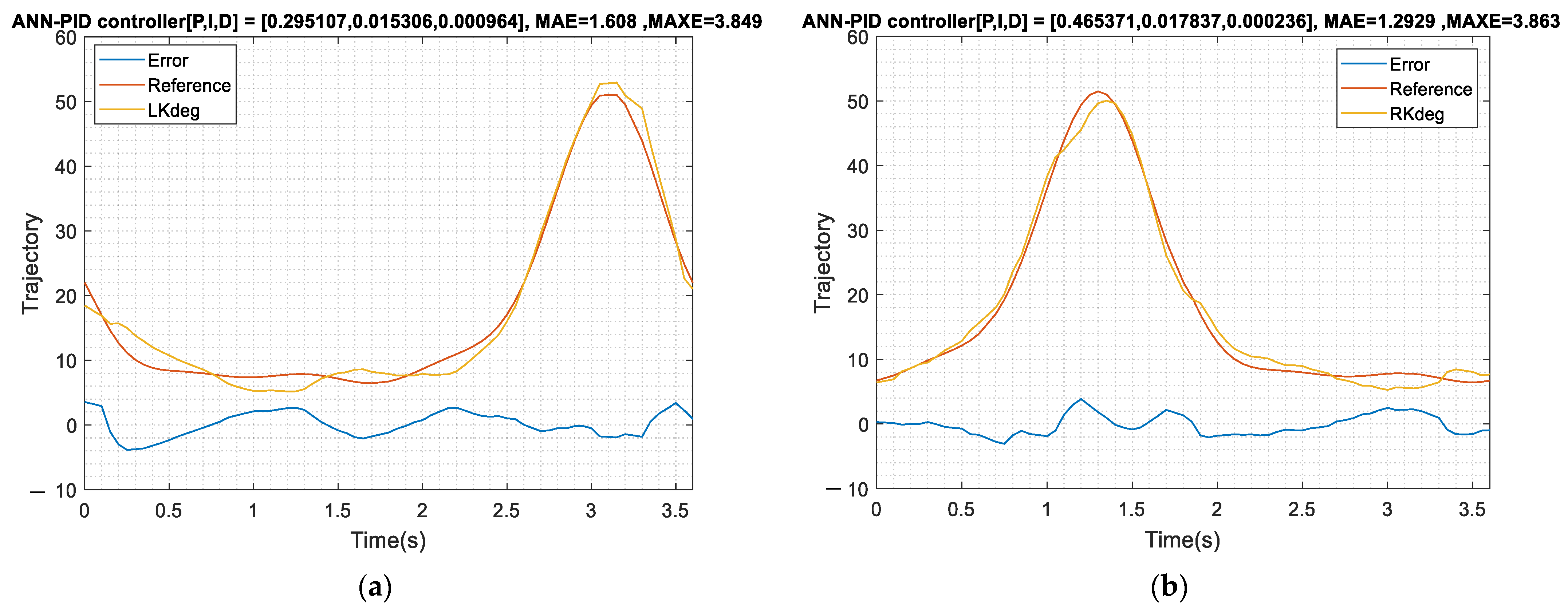
5.1. Knee Joint Controller Performance Comparison
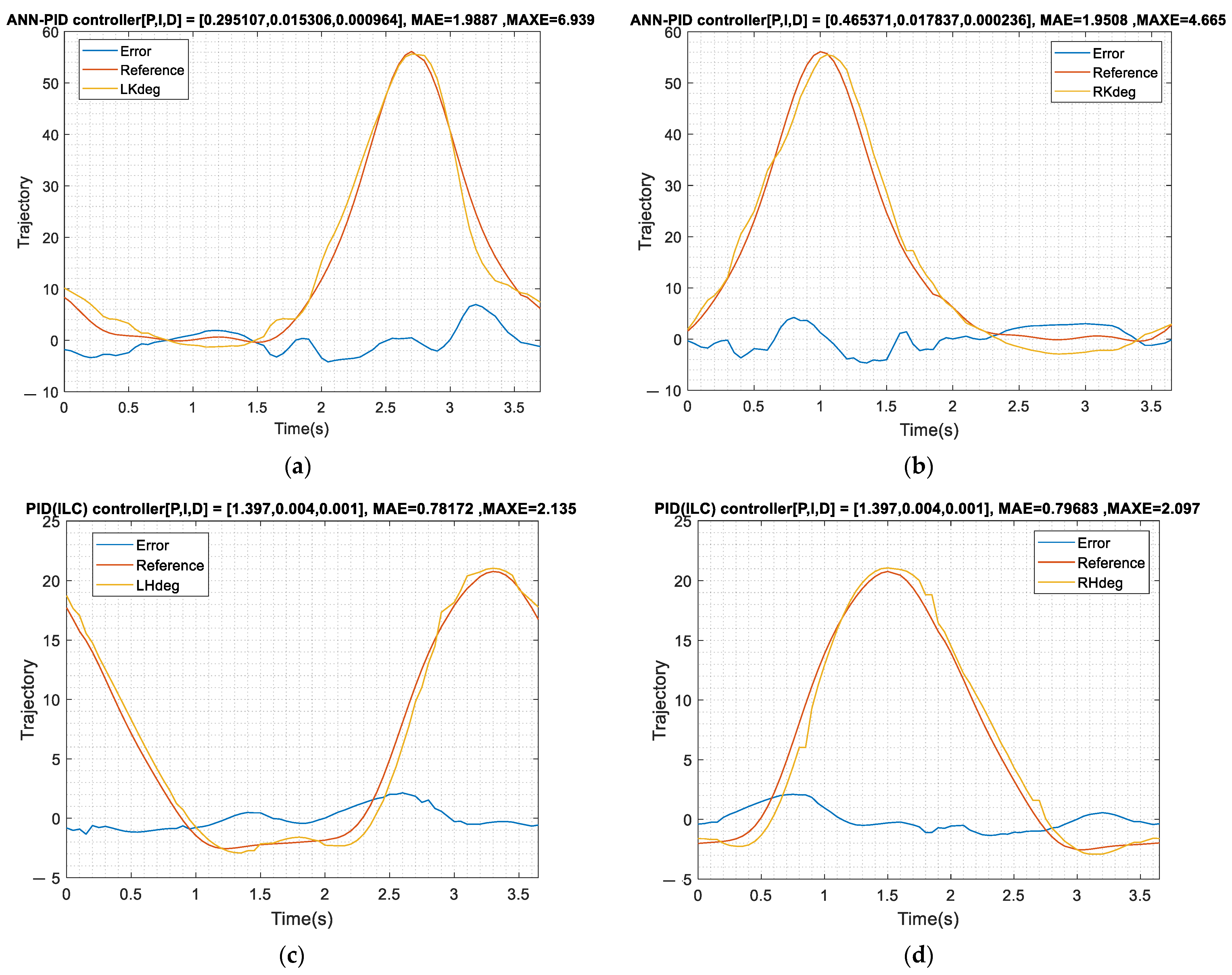
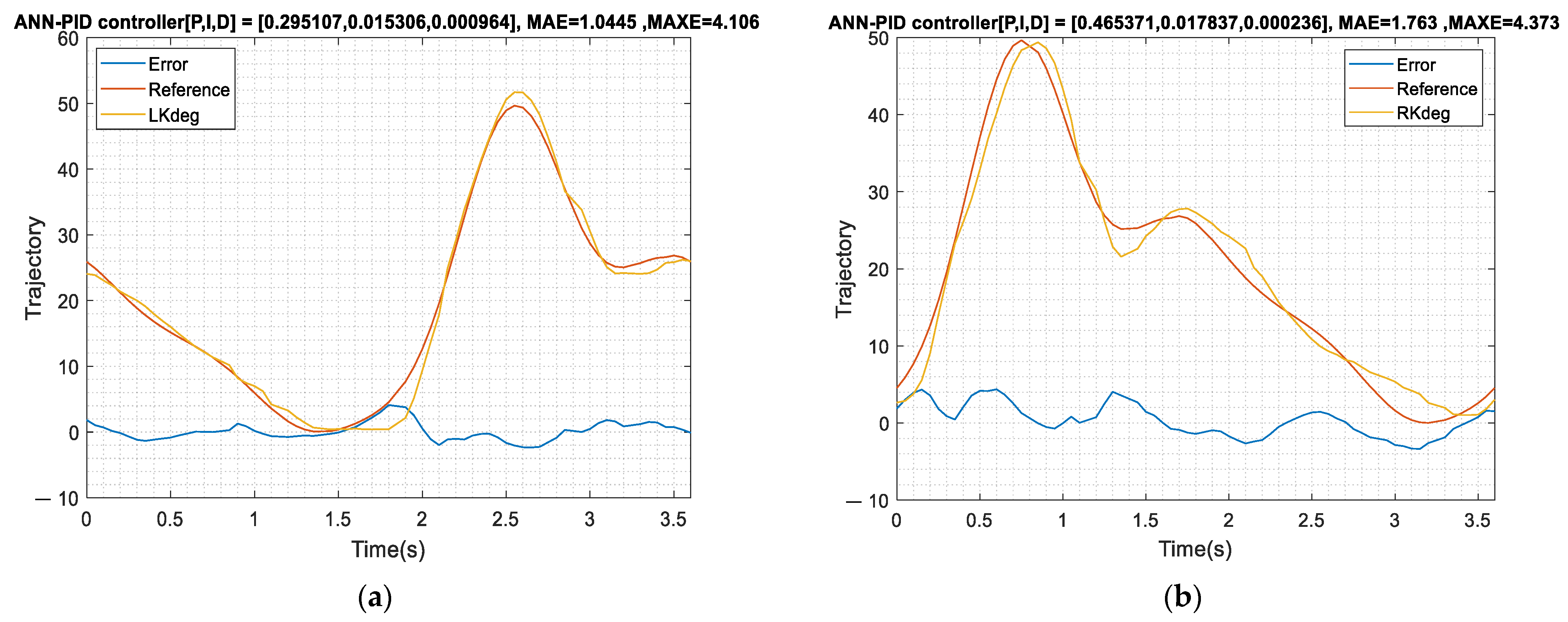
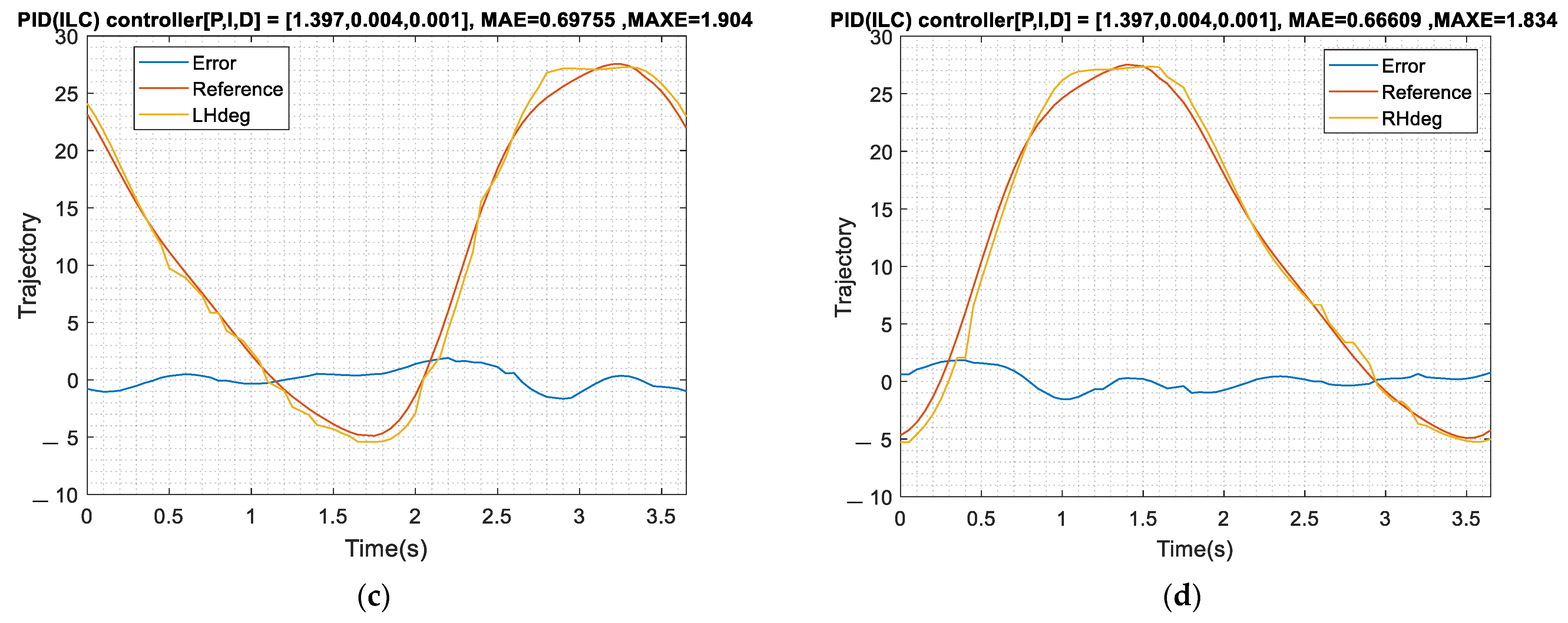
5.2. Multi-Subject LLRER Load Experiment
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Díaz, I.; Gil, J.J.; Sánchez, E. Lower-limb robotic rehabilitation: Literature review and challenges. J. Robot. 2011, 2011, 759764. [Google Scholar] [CrossRef] [Green Version]
- Wernig, A.; Muller, S.; Nanassy, A.; Cagol, E. Laufband Therapy Based on ‘Rules of Spinal Locomotion’ is Effective in Spinal Cord Injured Persons. Eur. J. Neurosci. 1995, 7, 823–829. [Google Scholar] [CrossRef] [PubMed]
- Colombo, G.; Joerg, M.; Schreier, R.; Dietz, V. Treadmill training of paraplegic patients using a robotic orthosis. J. Rehabil. Res. Dev. 2000, 37, 693–700. [Google Scholar] [PubMed]
- Freivogel, S.; Mehrholz, J.; Husak-Sotomayor, T.; Schmalohr, D. Gait training with the newly developed “LokoHelp”—System is feasible for non-ambulatory patients after stroke, spinal cord and brain injury. A feasibility study. Brain Inj. 2008, 22, 625–632. [Google Scholar] [CrossRef]
- West, G.R. Powered Gait Orthosis and Method of Utilizing Same. Patent number 6,689,075, 10 February 2004. [Google Scholar]
- Beyl, P.; Van Damme, M.; Van Ham, R.; Vanderborght, B.; Lefeber, D. Pleated Pneumatic Artificial Muscle-Based Actuator System as a Torque Source for Compliant Lower Limb Exoskeletons. IEEE/ASME Trans. Mechatron. 2014, 19, 1046–1056. [Google Scholar] [CrossRef]
- Yang, H.; Xiang, C.; Han, H.; Hao, L. Inverse kinematics modeling and motion control of PAM bionic elbow joint. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 1347–1352. [Google Scholar] [CrossRef]
- Tondu, B. Modelling of the McKibben artificial muscle: A review. J. Intell. Mater. Syst. Struct. 2012, 23, 225–253. [Google Scholar] [CrossRef]
- Carbonell, P.; Jiang, Z.P.; Repperger, D.W. Nonlinear control of a pneumatic muscle actuator: Backstepping vs. sliding-mode. In Proceedings of the 2001 IEEE International Conference on Control Applications, Mexico City, Mexico, 7 September 2001; pp. 167–172. [Google Scholar] [CrossRef]
- Kawato, M. Feedback-error-learning neural network for supervised motor learning. Adv. Neural Comput. 1990, 365–372. [Google Scholar]
- Nakanishi, J.; Schaal, S. Feedback error learning and nonlinear adaptive control. Neural Networks 2004, 17, 1453–1465. [Google Scholar] [CrossRef] [Green Version]
- Robinson, R.M.; Kothera, C.S.; Sanner, R.M.; Wereley, N.M. Nonlinear Control of Robotic Manipulators Driven by Pneumatic Artificial Muscles. IEEE/ASME Trans. Mechatronics 2015, 21, 55–68. [Google Scholar] [CrossRef]
- Nho, H.; Meckl, P. Intelligent feedforward control and payload estimation for a two-link robotic manipulator. IEEE/ASME Trans. Mechatronics 2003, 8, 277–283. [Google Scholar] [CrossRef]
- Liu, D.; Chen, W.; Pei, Z.; Wang, J. A brain-controlled lower-limb exoskeleton for human gait training. Rev. Sci. Instrum. 2017, 88, 104302. [Google Scholar] [CrossRef]
- Luu, T.P.; Nakagome, S.; He, Y.; Contreras-Vidal, J.L. Real-time EEG-based brain-computer interface to a virtual avatar enhances cortical involvement in human treadmill walking. Sci. Rep. 2017, 7, 1012. [Google Scholar] [CrossRef]
- Formaggio, E.; Massiero, S.; Bosco, A.; Izzi, F.; Piccion, F.; Del Felice, A. Quantitative EEG Evaluation during Robot-Assisted Foot Movement. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1633–1640. [Google Scholar] [CrossRef]
- Qiu, S.; Pei, Z.; Wang, C.; Tang, Z. Systematic Review on Wearable Lower Extremity Robotic Exoskeletons for Assisted Locomotion. J. Bionic Eng. 2022. [Google Scholar] [CrossRef]
- Bogue, R. Robotic exoskeletons: A review of recent progress. Ind. Robot.-Int. J. Robot. Res. Appl. 2015, 42, 5–10. [Google Scholar] [CrossRef]
- Kim, S.; Srinivasan, D.; Nussbaum, M.A.; Leonessa, A. Human gait during level walking with an occupational whole-body powered exoskeleton: Not yet a walk in the park. IEEE Access 2021, 9, 47901–47911. [Google Scholar] [CrossRef]
- Kazerooni, H.; Amundson, K.; Harding, N. Device and Method for Decreasing Energy Consumption of a Person by Use of a Lower Extremity Exoskeleton. Application Publication. US Patent EP2326288A1, 26 January 2015. [Google Scholar]
- Suzuki, K.; Mito, G.; Kawamoto, H.; Hasegawa, Y.; Sankai, Y. Intention-based walking support for paraplegia patients with robot suit HAL. Adv. Robot. 2007, 21, 1441–1469. [Google Scholar] [CrossRef] [Green Version]
- Tsukahara, A.; Hasegawa, Y.; Sankai, Y. Standing-up motion support for paraplegic patient with robot suit HAL. In Proceedings of the 2009 IEEE International Conference on Rehabilitation Robotics, Kyoto, Japan, 23–26 June 2009; pp. 211–217. [Google Scholar] [CrossRef]
- Tsukahara, A.; Kawanishi, R.; Hasegawa, Y.; Sankai, Y. Sit-to-stand and stand-to-sit transfer support for complete paraplegic patients with robot suit HAL. Adv. Robot. 2010, 24, 1615–1638. [Google Scholar] [CrossRef] [Green Version]
- Kawamoto, H.; Taal, S.; Niniss, H.; Hayashi, T.; Kamibayashi, K.; Eguchi, K.; Sankai, Y. Voluntary motion support control of robot suit HAL triggered by bioelectrical signal for hemiplegia. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology 2010, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 462–466. [Google Scholar] [CrossRef]
- Hassan, M.; Kadone, H.; Suzuki, K.; Sanka, Y. Wearable gait measurement system with an instrumented cane for exoskeleton control. Sensors 2014, 14, 1705–1722. [Google Scholar] [CrossRef] [Green Version]
- Nilsson, A.; Vreede, K.S.; Haglund, V.; Kawawamoto, H.; Sankai, Y.; Borg, J. Gait training early after stroke with a new exoskeleton-the hybrid assistive limb: A study of safety and feasibility. J. Neuro-Eng. Rehabil. 2014, 11, 92. [Google Scholar] [CrossRef] [Green Version]
- Tsukahara, A.; Hasegawa, Y.; Eguchi, K.; Sankai, Y. Restoration of gait for spinal cord injury patients using HAL with intention estimator for preferable swing speed. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 23, 308–318. [Google Scholar] [CrossRef] [PubMed]
- Hassan, M.; Kadone, H.; Ueno, T.; Hada, Y.; Sankai, Y.; Suzuki, K. Feasibility of synergy-based exoskeleton robot control in hemiplegia. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1233–1242. [Google Scholar] [CrossRef] [PubMed]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk™ exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord Med. 2012, 35, 96–101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. 2019, 32, 74. [Google Scholar] [CrossRef] [Green Version]
- Suszyński, M.; Peta, K. Assembly Sequence Planning Using Artificial Neural Networks for Mechanical Parts Based on Selected Criteria. Appl. Sci. 2021, 11, 10414. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Song, Y.; Rong, X. The Influence of the Activation Function in a Convolution Neural Network Model of Facial Expression Recognition. Appl. Sci. 2020, 10, 1897. [Google Scholar] [CrossRef] [Green Version]
- Suszyński, M.; Meller, A.; Peta, K.; Trączyński, M.; Butlewski, M.; Klimenda, F. Application of Neural Networks for Water Meter Body Assembly Process Optimization. Appl. Sci. 2022, 12, 11160. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Type | Specification |
|---|---|---|
| NI SBRIO-9631 | Embedded controller | Analog&Digital I/O, 266 MHz CPU, 64 MB DRAM, 128 MB Storage, 1 M Gate FPGA |
| NI 9516 | Servo Drive Interface Module | Servo, 1-Axis, Dual Encoder |
| MPYE-5-M5-010-b | Proportional directional control valve | Pressure range: 0~10 bar |
| Input voltage range: 0~10 V | ||
| MAS-20-300N-AA-MC-O-ER-BG | Pneumatic Artificial Muscle | Operating pressure: 0~6 bar; Maximal permissible contraction: 25% of nominal length |
| Maxon EC60flat | Flat brushless DC motor | Nominal speed: 3730 rpm |
| Nominal torque: 269 mNm | ||
| CSG-17-100-2UH-LW | Harmonic Drive; with cross roller bearing | Limit for average torque: 51 Nm Limit for Momentary torque:143 Nm |
| SPAB-P10R-G18-NB-K1 | Air pressure sensor | Pressure range: 0~10 bar; Electrical output: 1~5 V analog voltage output |
| Notations Type | Specification |
|---|---|
| N | Tracking points per gait cycle |
| Desired output profile | |
| Real output in the current cycle | |
| Output error in the current cycle | |
| L | Learning rate |
| Control signal of current cycle | |
| Control signal of next cycle |
| Treadmill Speed (km/h) | Sec/Cycle | Right Hip | Left Hip | ||
|---|---|---|---|---|---|
| MAE (°) | MAXE (°) | MAE (°) | MAXE (°) | ||
| 0.12 | 30 | 0.0241 | 0.5910 | 0.0225 | 0.1280 |
| 0.24 | 15 | 0.0494 | 0.2440 | 0.0440 | 0.2030 |
| 0.53 | 6.8 | 0.1150 | 0.4490 | 0.0890 | 0.4560 |
| 0.85 | 4.25 | 0.3123 | 0.7690 | 0.1856 | 0.7460 |
| 1 | 2.89 | 0.5616 | 1.7750 | 0.4778 | 1.7490 |
| Treadmill Speed (km/h) | Sec/Cycle | Right Knee | Left Knee | ||
|---|---|---|---|---|---|
| MAE (°) | MAXE (°) | MAE (°) | MAXE (°) | ||
| 0.12 | 30 | 0.3944 | 1.9910 | 0.4288 | 1.4910 |
| 0.24 | 15 | 0.9204 | 3.0030 | 0.7004 | 2.4390 |
| 0.53 | 6.8 | 1.1085 | 5.5600 | 0.7162 | 2.7850 |
| 0.85 | 4.25 | 2.3364 | 7.4040 | 1.4856 | 4.2670 |
| 1 | 2.89 | 2.5477 | 9.0250 | 2.1554 | 5.3690 |
| LK | PID | ANN (Trained IV) + PID | ANN (Trained IV) + PID (PSO Tuned) | ANN(Trained IV) + PID (PSO Tuned) with Load | ||||
|---|---|---|---|---|---|---|---|---|
| Test NO. | MAE | MAXE | MAE | MAXE | MAE | MAXE | MAE | MAXE |
| 1 | 3.091 | 18.381 | 1.425 | 5.273 | 1.226 | 3.680 | 1.870 | 5.336 |
| 2 | 3.665 | 19.497 | 1.480 | 6.481 | 1.214 | 3.976 | 1.575 | 3.524 |
| 3 | 3.388 | 19.282 | 1.199 | 4.426 | 1.195 | 4.275 | 1.608 | 3.849 |
| 4 | 3.325 | 18.329 | 1.257 | 4.099 | 1.237 | 3.357 | 1.333 | 3.174 |
| 5 | 3.590 | 18.961 | 1.217 | 4.728 | 1.181 | 3.933 | 1.901 | 5.348 |
| RK | PID | ANN (Trained IV) + PID | ANN (Trained IV) + PID(PSO Tuned) | ANN (Trained IV) + PID(PSO Tuned) with Load | ||||
|---|---|---|---|---|---|---|---|---|
| Test NO. | MAE | MAXE | MAE | MAXE | MAE | MAXE | MAE | MAXE |
| 1 | 3.190 | 16.310 | 1.334 | 4.972 | 1.172 | 5.205 | 1.361 | 6.154 |
| 2 | 3.897 | 16.228 | 1.666 | 5.082 | 1.190 | 4.122 | 1.427 | 6.618 |
| 3 | 4.018 | 16.550 | 1.258 | 4.611 | 1.361 | 3.462 | 1.293 | 3.863 |
| 4 | 3.580 | 16.309 | 1.295 | 5.007 | 1.077 | 3.512 | 1.530 | 5.752 |
| 5 | 3.997 | 16.444 | 1.955 | 5.840 | 1.189 | 3.528 | 1.350 | 5.990 |
| Loaded Test | Treadmill Speed (1 km/h) | |||||||
|---|---|---|---|---|---|---|---|---|
| Left_Hip | Right_Hip | Left_Knee | Right_Knee | |||||
| Controller | PID + ILC | PID + ILC | PID (PSO Tuned) +ANN | PID (PSO Tuned) +ANN | ||||
| Test NO. | MAE | MAXE | MAE | MAXE | MAE | MAXE | MAE | MAXE |
| P1 | 0.782 | 2.135 | 0.797 | 2.097 | 1.989 | 6.939 | 1.951 | 4.665 |
| P2 | 0.698 | 1.904 | 0.666 | 1.834 | 1.045 | 4.106 | 1.763 | 4.373 |
| P3 | 1.145 | 3.741 | 1.125 | 3.235 | 1.427 | 4.067 | 2.580 | 6.405 |
| P4 | 1.317 | 3.429 | 1.307 | 3.058 | 1.586 | 3.867 | 1.773 | 6.671 |
| P5 | 0.351 | 1.390 | 0.350 | 1.407 | 1.970 | 6.615 | 1.106 | 5.544 |
| P6 | 0.967 | 2.996 | 0.976 | 2.320 | 1.302 | 2.812 | 0.981 | 3.284 |
| P7 | 0.987 | 3.316 | 0.813 | 3.006 | 2.058 | 5.191 | 1.367 | 4.046 |
| P8 | 0.778 | 2.361 | 0.715 | 2.250 | 1.798 | 4.409 | 1.465 | 4.188 |
| P9 | 1.299 | 2.777 | 1.315 | 2.800 | 1.615 | 7.935 | 1.299 | 6.226 |
| P10 | 0.825 | 1.953 | 0.827 | 1.949 | 1.829 | 6.460 | 1.950 | 5.665 |
| avg | 0.915 | 2.600 | 0.889 | 2.396 | 1.662 | 5.240 | 1.623 | 5.107 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-J.; Sie, T.-Y. Design and Experimental Characterization of Artificial Neural Network Controller for a Lower Limb Robotic Exoskeleton. Actuators 2023, 12, 55. https://doi.org/10.3390/act12020055
Lin C-J, Sie T-Y. Design and Experimental Characterization of Artificial Neural Network Controller for a Lower Limb Robotic Exoskeleton. Actuators. 2023; 12(2):55. https://doi.org/10.3390/act12020055
Chicago/Turabian StyleLin, Chih-Jer, and Ting-Yi Sie. 2023. "Design and Experimental Characterization of Artificial Neural Network Controller for a Lower Limb Robotic Exoskeleton" Actuators 12, no. 2: 55. https://doi.org/10.3390/act12020055