
Application of Opposition-Based Learning Jumping Spider Optimization Algorithm in Gas Turbine Coupled Cooling System

Abstract
:1. Introduction
2. Gas Turbine Cooling Control System
2.1. Operating Principle and Characterization
- (1)
- DN400 is a flow pipe. The flow rate of the inlet water to the heat exchanger of the cooling module (flowmeter 01 in Figure 1) is controlled by regulating the electric valve 01.
- (2)
- DN200 is a pressure pipe that controls the inlet water pressure ( in Figure 1) by adjusting pressure relief valve 02.
- (3)
- DN350 is a temperature pipe, regulating the return water flow through the pump and valve 03, which controls the inlet water temperature in the heat exchanger ( in Figure 1).
2.2. Model Identification of Coupled Gas Turbine Cooling System
2.3. Comprehensive Analysis of Model Error
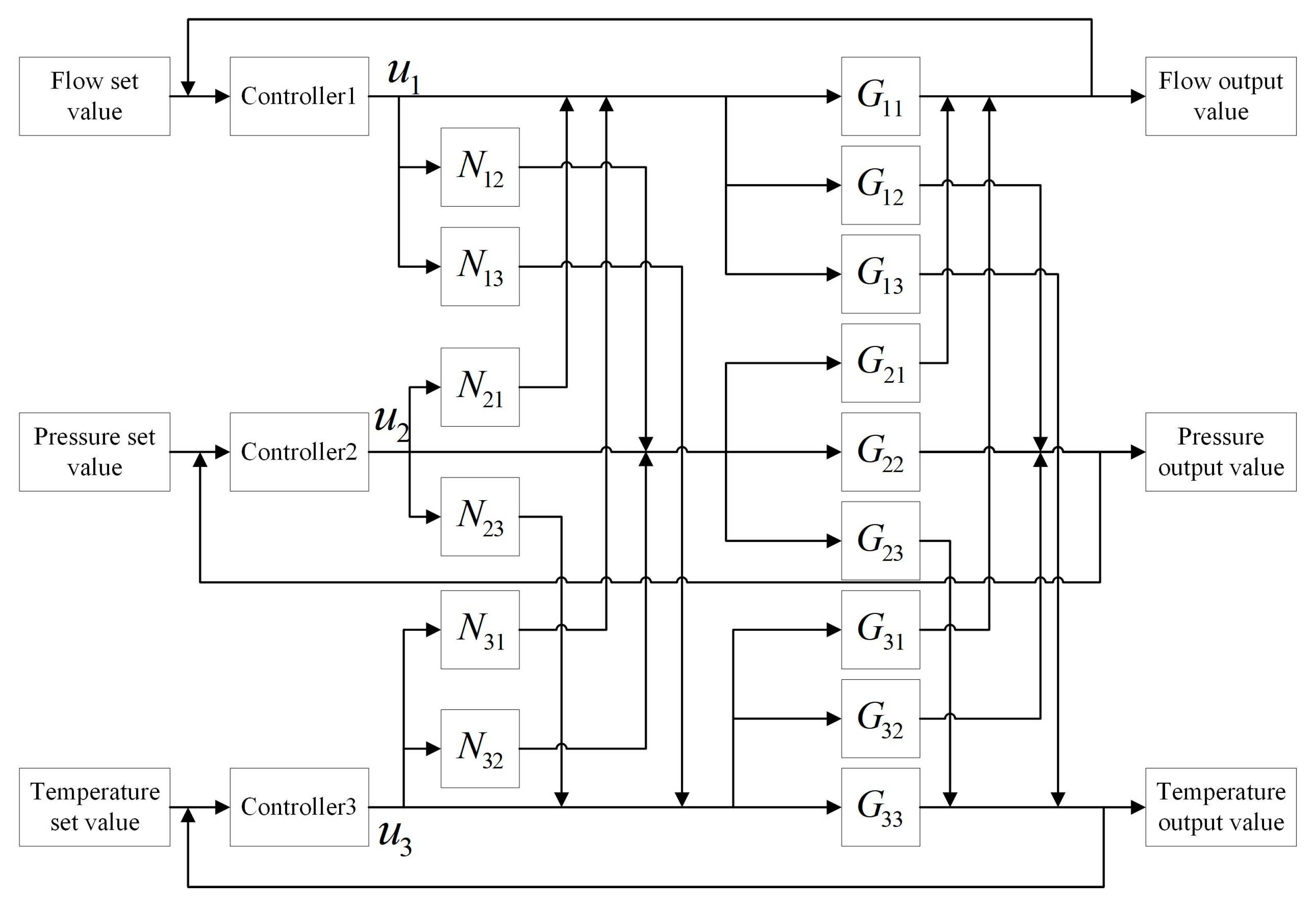
2.4. Decoupling Compensator
- (1)
- Diagonal matrix decoupling makes it difficult to compute the decoupling compensation matrix for a third-order MIMO system, and the matrix equation is difficult to express.
- (2)
- There are 27 matrix configuration cases that need to be discussed for inverted decoupling, increasing the experimental complexity, and discussing the effects and feasibility of different decoupling matrices is also complicated work.
- (3)
- The principle of unit matrix decoupling is similar to that of diagonal matrix decoupling, but the calculation is more difficult to realize.
3. Opposition-Based Learning Jumping Spider Optimization Algorithm
3.1. Opposition-Based Learning Population Initialization Strategy
- (1)
- Generating an original population. The original population is a pseudo-random number generated by a random algorithm, which can be either PRNGs or CNGs.
- (2)
- Generating an oppositive population of the same size according to a heuristic rule. The heuristic rule is:
- (3)
- Selecting the appropriate individual as the new population based on the calculated individual fitness value. An opposition-based learning population initialization flowchart is shown in Figure 10:
3.2. Principles of Obl-JSOA
- (1)
- Defining the number of populations and the maximum number of iterations, which are set to 50 and 30, respectively. PRNGs are used to randomly generate the locations of individual jumping spiders and then a population of opposition-based jumping spiders is generated according to the opposition-based learning heuristic rule.
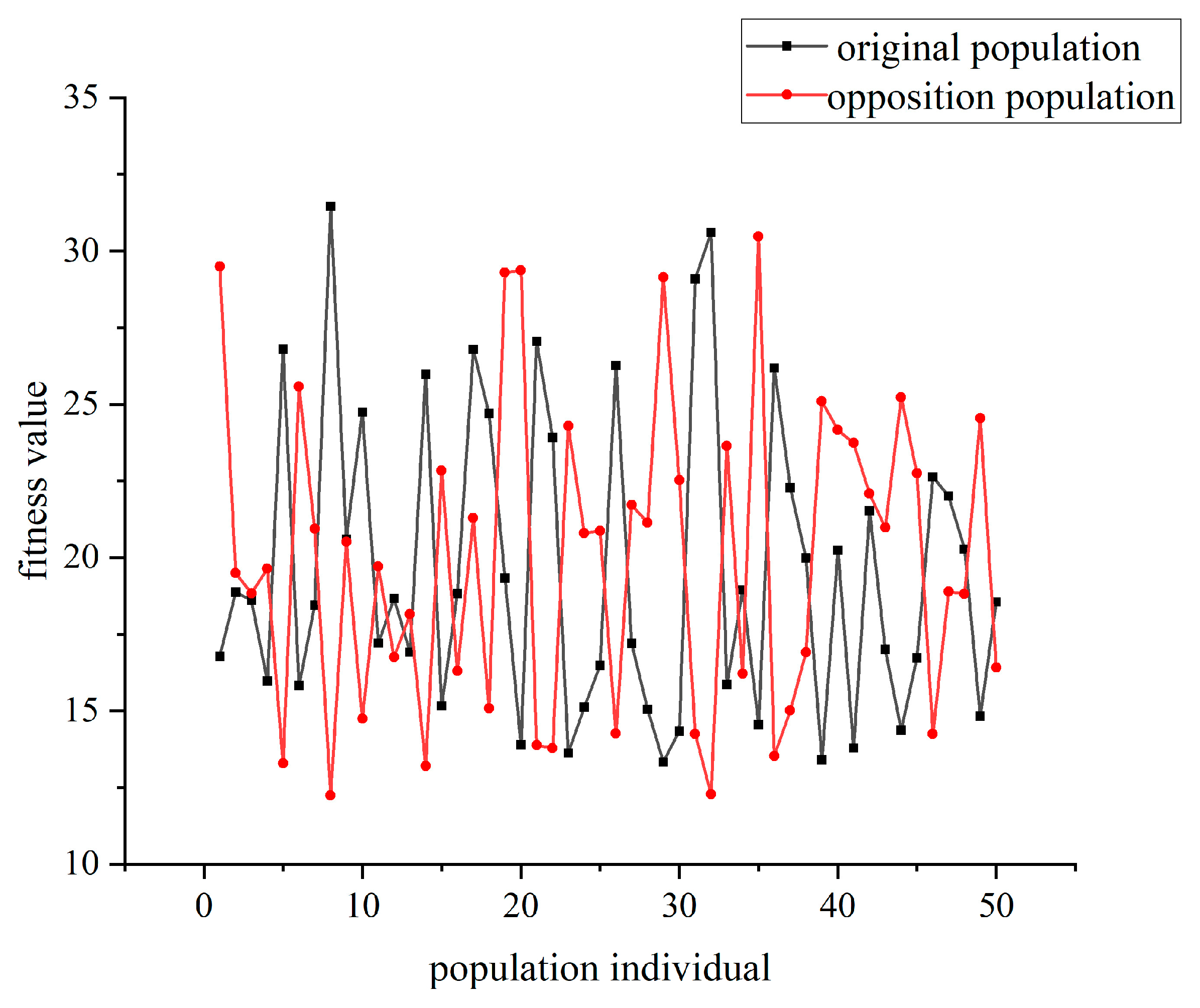
- (2)
- The sum of the relative error of each controlled variable and the output standard deviation is used as the fitness function to calculate the individual fitness values of the original population and opposition population. In the union of the original population and the opposing population (100 individuals), 50 individuals with better fitness values are selected as the new original population to complete the population initialization of the opposition-based learning strategy, and the fitness values of the original and opposition-based populations are shown in Figure 11.
| Opposition-based Learning population initialization strategy |
| 1. Initializing population pop through pseudo-random number generators 2. Calculating fitness value ori_fitness 3. Generating opposition-based population obl_pop bt Equation (3) 4. Calculating opposition-based population fitness value obl_fitness 5. For i = 1: SearchAgents 6. If obl_fitness(i) < ori_fitness(i) 7. pop(i) = obl_pop(i) 8. orifitness(i) = oblfitness(i) 9. End if 10. End for 11. Return pop and orifitness 12. Ending procedure |
- (3)
- Iterative optimization: each iteration updates the individual positions according to the algorithmic optimization strategy (persecution strategy, jumping strategy, etc.), which in turn updates the parameters of the PID controller.
- (4)
- Calculating the pheromone concentration based on the individual fitness value, and determining whether the current individual needs to update its position according to the pheromone model discrimination condition.
- (5)
- Updating the position of the best individual in the recorded population and the best fitness value until the completion of the iteration, and transporting the optimal PID controller parameters into the simulink model through the sim function.
4. Simulation Results of the Gas Turbine Cooling Control System
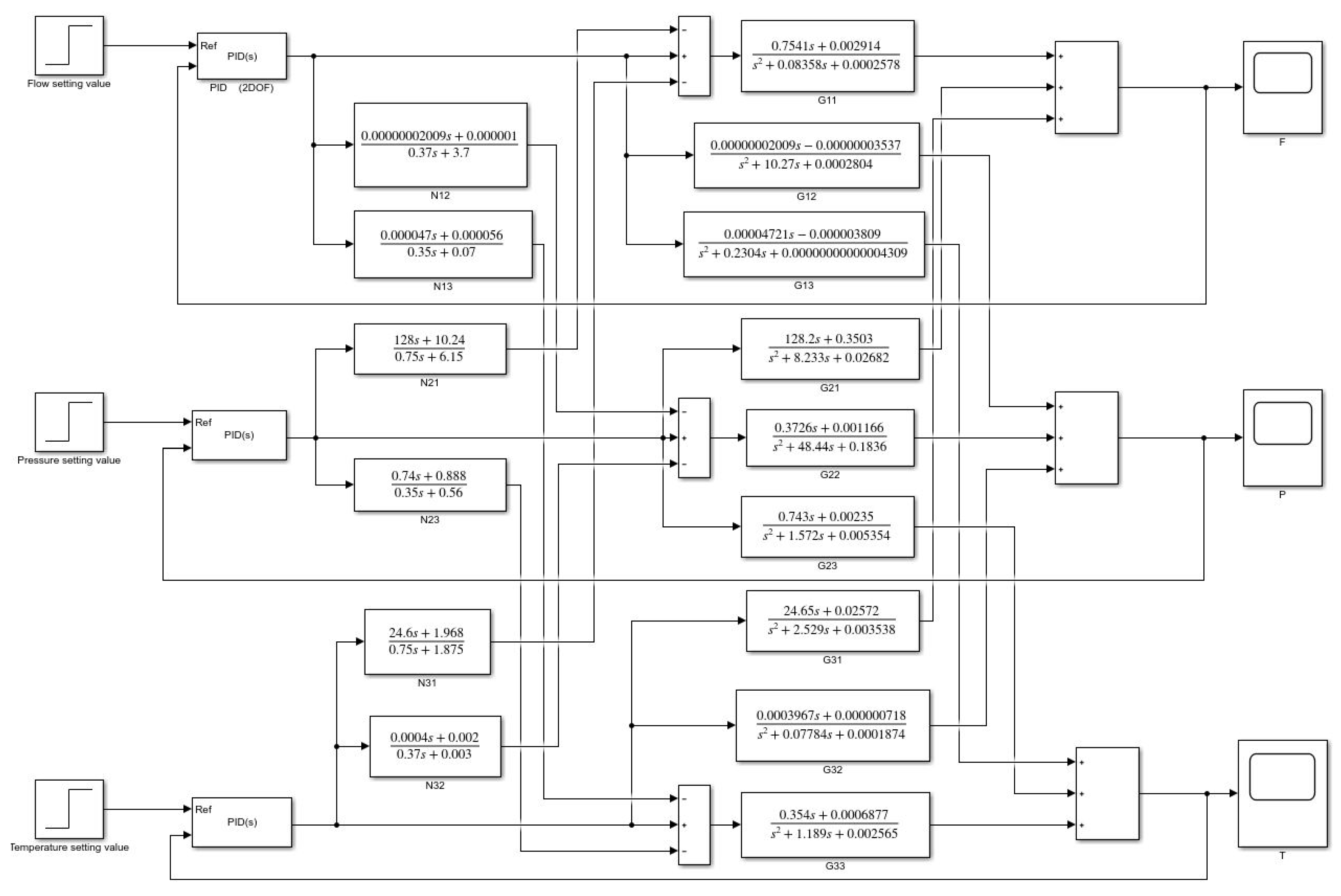
- (1)
- Establishing a simulation model of the gas turbine cooling system and setting the parameters of the PID controller as variables, which are represented as the position of individual jumping spiders in the Obl-JSOA.
- (2)
- Using an opposition-based learning strategy to initialize the individual positions of the population in order to initialize the PID controller parameters.
- (3)
- Iterative calculation: updating individual positions according to algorithm optimization strategies for each iteration, and then updating the parameters of the PID controller.
- (1)
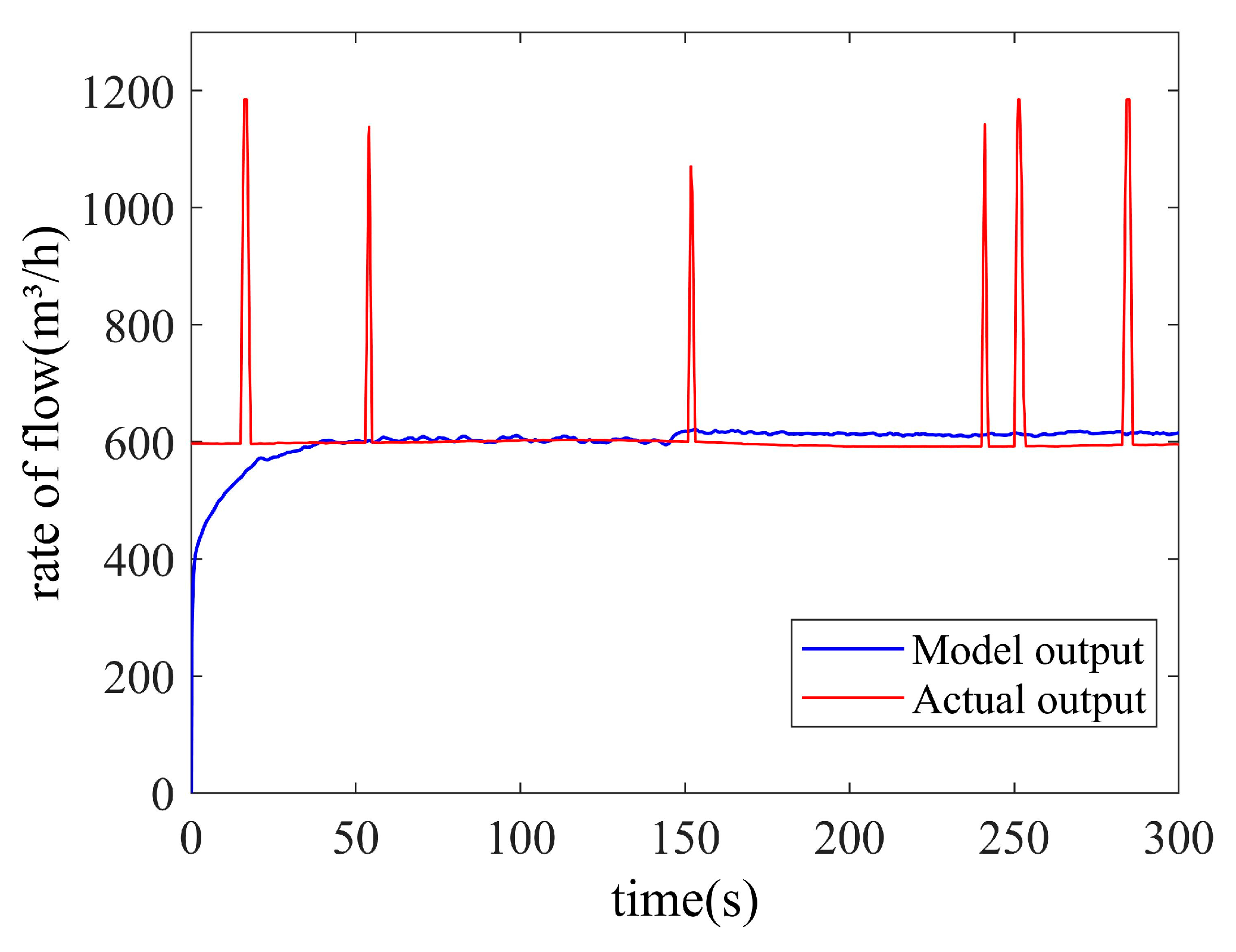
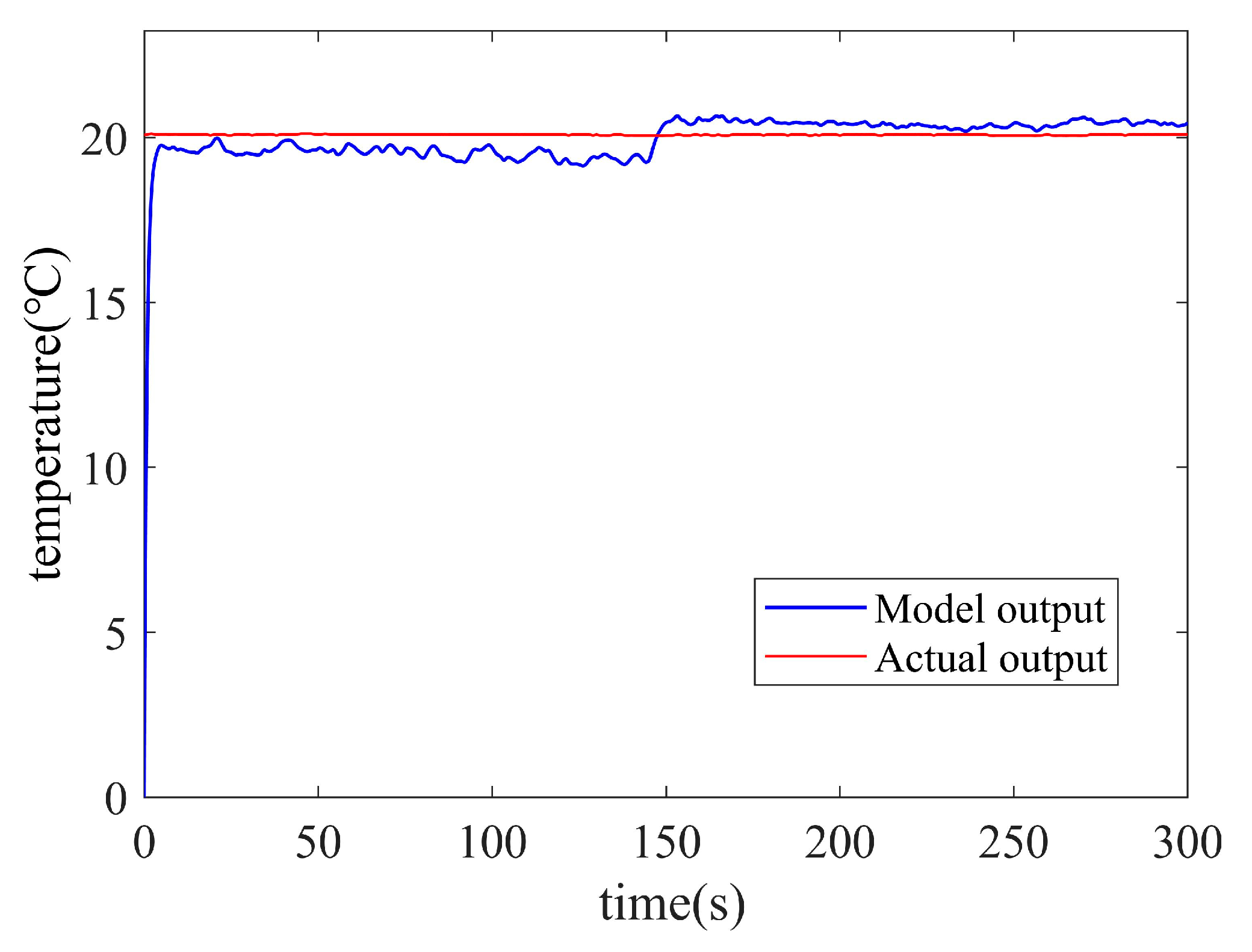
- Whether in simulation or experiment, there may be situations where the pressure exceeds 0.3 MPa. The system can accept it as long as it does not seriously exceed 0.3 MPa for a long time, as the strength and toughness of pipeline materials are usually high.
- (2)
- Plate heat exchangers and pipelines both dissipate heat towards the surrounding environment, and the flow rate and heat transfer coefficient are not constant. The temperature will not rise this fast in actual experiments.
- (3)
- The coupling model is established based on on-site input and output signals, and there are significant disturbances that result in inaccurate transfer function models describing the system. There is an error between the model pressure output result and the actual pressure output result. If the coupling between pressure and other variables is strong, the existing error can lead to poor control effects, and even overload pressure.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Unnikrishnan, U.; Yang, V. A review of cooling technologies for high temperature rotating components in gas turbine. Propuls. Power Res. 2022, 11, 293–310. [Google Scholar] [CrossRef]
- Hamed, S.D.; Eric, J.H.; Lei, C.; Samira, P. Using novel integrated Maisotsenko cooler and absorption chiller for cooling of gas turbine inlet air. Energy Convers. Manag. 2019, 195, 1067–1078. [Google Scholar]
- Samira, P.; Eric, J.H.; Lei, C. Simulation of innovative hybridizing M-cycle cooler and absorption-refrigeration for pre-cooling of gas turbine intake air: Including a case study for Siemens SGT-750 gas turbine. Energy 2022, 247, 123356. [Google Scholar]
- Cha, S.H.; Na, S.I.; Lee, Y.H.; Kim, M.S. Thermodynamic analysis of a gas turbine inlet air cooling and recovering system in gas turbine and CO2 combined cycle using cold energy from LNG terminal. Energy Convers. Manag. 2021, 230, 113802. [Google Scholar] [CrossRef]
- Barakat, E.; Jin, T.; Wang, G.F. Performance analysis of selective exhaust gas recirculation integrated with fogging cooling system for gas turbine power plants. Energy 2023, 263, 125849. [Google Scholar] [CrossRef]
- Abdul Karim, Z.A.; Mohd Azmi, M.N.H.; Abdullah, A.S. Design of a Heat Exchanger for Gas Turbine Inlet Air using Chilled Water System. Energy Procedia 2012, 14, 1689–1694. [Google Scholar] [CrossRef]
- Baina, F.; Malmquist, A.; Alejo, L.; Palm, B.; Fransson, T.H. Analysis of a high-temperature heat exchanger for an externally-fired micro gas turbine. Appl. Therm. Eng. 2015, 75, 410–420. [Google Scholar] [CrossRef]
- Xu, J.; Wang, R.; Zhang, Q.X.; Cui, T.; Li, H.; Pei, L.; Quan, X.R. Design of Engine Cooling System Using Improved Particle Swarm Optimization Algorithm. IEEE Sens. J. 2023, 23, 19060–19072. [Google Scholar] [CrossRef]
- Liu, L.; Tian, S.; Xue, D.Y.; Tao, Z.; Chen, Y.Q.; Zhang, S. A Review of Industrial MIMO Decoupling Control. Int. J. Control. Autom. Syst. 2019, 17, 1246–1254. [Google Scholar] [CrossRef]
- Hägglund, T.; Shinde, S.; Theorin, A.; Thomsen, U. An industrial control loop decoupler for process control applications. Control Eng. Pract. 2022, 123, 105138. [Google Scholar] [CrossRef]
- Wang, C.Y.; Zhao, W.Z.; Luan, Z.K.; Gao, Q.; Deng, K. Decoupling control of vehicle chassis system based on neural network inverse system. Mech. Syst. Signal Process. 2018, 106, 176–197. [Google Scholar] [CrossRef]
- Zhao, D.D.; Xia, L.; Dang, H.B.; Wu, Z.Z.; Li, H.Y. Design and control of air supply system for PEMFC UAV based on dynamic decoupling strategy. Energy Convers. Manag. 2022, 253, 115159. [Google Scholar] [CrossRef]
- Skogestad, S.; Zotică, C.; Alsop, N. Transformed inputs for linearization, decoupling and feedforward control. J. Process Control 2023, 122, 113–133. [Google Scholar] [CrossRef]
- Luan, X.L.; Chen, Q.; Albertos, P.; Liu, F. Compensator design based on inverted decoupling for non-square processes. IET Control Theory Appl. 2017, 11, 996–1005. [Google Scholar] [CrossRef]
- Kunimatsu, S.; Tateishi, K.; Ishitobi, M.; Fujii, T. Optimal decentralized servo control for systems with diagonal decoupling matrix. IFAC Proc. Vol. 2011, 44, 2558–2563. [Google Scholar] [CrossRef]
- Gong, D.W.; Qiu, Z.Q.; Zheng, W.; Ke, Z.W.; Liu, Y. Intelligent Decoupling Control Study of PMSM Based on the Neural Network Inverse System. Front. Energy Res. 2022, 10, 936776. [Google Scholar]
- Zhang, Y.; Luan, T.; Yao, Y. MtsPSO-PID Neural Network Decoupling Control in Power Plant Boiler. IFAC Proc. Vol. 2013, 46, 101–105. [Google Scholar] [CrossRef]
- Liao, Q.L.; Sun, D. Sparse and decoupling control strategies based on Takagi–Sugeno fuzzy models. IEEE Trans. Cybern. 2019, 51, 947–960. [Google Scholar] [CrossRef]
- Londhe, P.S.; Mohan, S.; Patre, B.M.; Waghmare, L.M. Robust task-space control of an autonomous underwater vehicle-manipulator system by PID-like fuzzy control scheme with disturbance estimator. Ocean Eng. 2017, 139, 1–13. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, H.C.; Peng, L.; Ye, X.C.; Xu, S.C.; Zhang, T. Feedforward-decoupled closed-loop fuzzy proportion-integral-derivative control of air supply system of proton exchange membrane fuel cell. Energy 2022, 240, 122490. [Google Scholar] [CrossRef]
- Garrido, J.; Vázquez, F.; Morilla, F. Inverted decoupling internal model control for square stable multivariable time delay systems. J. Process Control 2014, 24, 1710–1719. [Google Scholar] [CrossRef]
- Garrido, J.; Vázquez, F.; Morilla, F. An extended approach of inverted decoupling. J. Process Control 2011, 21, 55–68. [Google Scholar] [CrossRef]
- Wen, S.; Wang, J.S.; Gao, X.P.; Fang, X.H. Water lever decoupling control strategy and simulation experiments of high pressure heating system. In Proceedings of the 2018 Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; Volume 9, p. 11. [Google Scholar]
- Mirjalili, S.; Dong, J.S.; Lewis, A.; Sadiq, A.S. Particle Swarm Optimization: Theory, Literature Review, and Application in Airfoil Design. Nat. Inspired Optim. 2020, 811, 167–184. [Google Scholar]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Peraza-Vázquez, H.; Peña-Delgado, A.F.; Ranjan, P.; Barde, C.; Choubey, A.; Morales-Cepeda, A.B. A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade. Mathematics 2022, 10, 102. [Google Scholar] [CrossRef]
- Naruei, I.; Keynia, F. A new optimization method based on COOT bird natural life model. Expert Syst. Appl. 2021, 183, 115352. [Google Scholar] [CrossRef]
- Talatahari, S.; Azizi, M. Optimization of constrained mathematical and engineering design problems using chaos game optimization. Comput. Ind. Eng. 2020, 145, 106560. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussain, K.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W. Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 2021, 51, 1531–1551. [Google Scholar] [CrossRef]
- Kazimipour, B.; Li, X.; Qin, A.K. A review of population initialization techniques for evolutionary algorithms. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; pp. 2585–2592. [Google Scholar]
- Pant, M.; Thangaraj, R.; Abraham, A. Particle Swarm Optimization: Performance Tuning and Empirical Analysis. In Foundations of Computational Intelligence; Abraham, A., Hassanien, A.E., Siarry, P., Engelbrecht, A., Eds.; Springer: Heidelberg, Germany, 2009; Volume 3, pp. 101–128. [Google Scholar]
- Zhang, M.; Zhang, W.; Sun, Y. Chaotic co-evolutionary algorithm based on differential evolution and particle swarm optimization. In Proceedings of the 2009 IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009. [Google Scholar]
- William, J.M.; Russel, E.C. Quasi-Random Sequences and Their Discrepancies. SIAM J. Sci. Comput. 1994, 15, 1251–1279. [Google Scholar]
- Kazimipour, B.; Li, X.; Qin, A. Initialization methods for large scale global optimization. In Proceedings of the Evolutionary Computation (CEC), Cancun, Mexico, 20–23 June 2013; pp. 2750–2757. [Google Scholar]
- Li, J.H.; Gao, Y.L.; Wang, K.G.; Sun, Y. A dual opposition-based learning for differential evolution with protective mechanism for engineering optimization problems. Appl. Soft Comput. 2021, 113, 107942. [Google Scholar] [CrossRef]
- Mohapatra, S.; Mohapatra, P. Fast random opposition-based learning Golden Jackal Optimization algorithm. Knowl. -Based Syst. 2023, 275, 110679. [Google Scholar] [CrossRef]
- Luo, X.L.; Du, B.; Gui, P.; Zhang, D.Y.; Hu, W. A Hunger Games Search algorithm with opposition-based learning for solving multimodal medical image registration. Neurocomputing 2023, 540, 126204. [Google Scholar] [CrossRef]
- Jiao, J.J.; Cheng, J.L.; Liu, Y.B.; Yang, H.Y.; Tan, D.R.; Cheng, P.; Zhang, Y.Q.; Jiang, C.L.; Chen, Z. Inversion of TEM measurement data via a quantum particle swarm optimization algorithm with the elite opposition-based learning strategy. Comput. Geosci. 2023, 174, 105334. [Google Scholar] [CrossRef]
- Trojovský, P.; Dehghani, M. A new bio-inspired metaheuristic algorithm for solving optimization problems based on walruses behavior. Sci. Rep. 2023, 13, 8775. [Google Scholar] [CrossRef]
- Mohamed, A.B.; Mohamed, R.; Zidan, M.; Mohamed, J.; Mohamed, A. Mantis Search Algorithm: A novel bio-inspired algorithm for global optimization and engineering design problems. Comput. Methods Appl. Mech. Eng. 2023, 415, 116200. [Google Scholar]
- Pilkington, A.; Rosic, B.; Tanimoto, K.; Horie, S. Prediction of natural convection heat transfer in gas turbines. Int. J. Heat Mass Transf. 2019, 141, 233–244. [Google Scholar] [CrossRef]
- Padovani, D.; Rundo, M.; Altare, G. The Working Hydraulics of Valve-Controlled Mobile Machines: Classification and Review. J. Dyn. Syst. Meas. Control 2020, 142, 070801. [Google Scholar] [CrossRef]
- Wang, S.H.; Tian, Y.T.; Li, S.J. A simultaneous optimization of a flexible heat exchanger network under uncertain conditions. Appl. Therm. Eng. 2021, 183, 116230. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Decoupling Methods | Advantages | Drawbacks |
|---|---|---|
| neural network decoupling | Low requirement of mathematical models [16] | It is easy for the weight learning of neural network to fall into local optimum [17] |
| fuzzy decoupling | The establishment of corresponding fuzzy rules can solve the coupled system with no clear mapping relationship [18] | It has more parameters to set, making it difficult to formulate fuzzy rules [19] |
| feedforward compensation decoupling | The general expression of the model is easier to obtain and implement [20] | Depend on process channel characteristics, require high model accuracy |
| inverted decoupling | Decoupled models are easy to express and less computationally difficult [21] | There are too many results from decoupling matrices of multidimensional systems [22]. |
| diagonal matrix decoupling | Transforming MIMO systems into multiple complementary single loop systems [23] | Transfer function models for complex industrial systems are complex and difficult to compute |
| unit matrix decoupling | Decoupling significantly improves system performance | Completely dependent on process dynamics, difficult to apply in engineering |
| Population Initialization Techniques | Advantages | Drawbacks |
|---|---|---|
| PRNGs | The most commonly used population initializers [31] | PRNGs cannot produce perfect evenly distributed points |
| CNGs | Randomness and regularity are desirable [32] | It can hardly be generalized to higher dimensions |
| QRS | QRS techniques have strong theoretical advantages over stochastic | Population size is relatively smaller than it should be to satisfy the underlying assumptions [33] |
| UD | UD is directly applicable to nominal and discrete optimization problems | High cost of assessing and counting stocks [34] |
| CVT | Producing geometrically uniform populations without using any objective function evaluations | The performance of the algorithm depends on the internal zoning or distance metric, introducing additional parameters |
| Variable | Obl-JSOA | JSOA | PSO | PID |
|---|---|---|---|---|
| Flow | 0.09 s | 0.13 s | 0.23 s | 0.57 s |
| Pressure | 0.46 s | 0.88 s | 0.98 s | 5.55 s |
| Temperature | 1.58 s | 2.13 s | 5.53 s | 49.14 s |
| Variable | Obl-JSOA | JSOA | PSO | PID |
|---|---|---|---|---|
| Flow | 0% | 0% | 0% | 0.05% |
| Pressure | 0.03% | 0.067% | 0.067% | 0.47% |
| Temperature | 0% | 0% | 0.045% | 0.32% |
| Variable | Obl-JSOA | JSOA | PSO | PID |
|---|---|---|---|---|
| Flow | 0% | 0% | 0% | 2.35% |
| Pressure | 1.8% | 3.07% | 2.7% | 6.3% |
| Temperature | 0.81% | 0.77% | 0% | 0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Li, T.; Ni, Y.; Song, K.; Li, Y. Application of Opposition-Based Learning Jumping Spider Optimization Algorithm in Gas Turbine Coupled Cooling System. Actuators 2023, 12, 396. https://doi.org/10.3390/act12100396
Wang D, Li T, Ni Y, Song K, Li Y. Application of Opposition-Based Learning Jumping Spider Optimization Algorithm in Gas Turbine Coupled Cooling System. Actuators. 2023; 12(10):396. https://doi.org/10.3390/act12100396
Chicago/Turabian StyleWang, Dazhi, Tianyi Li, Yongliang Ni, Keling Song, and Yanming Li. 2023. "Application of Opposition-Based Learning Jumping Spider Optimization Algorithm in Gas Turbine Coupled Cooling System" Actuators 12, no. 10: 396. https://doi.org/10.3390/act12100396