
Torque Increase Strategy for Induction Motor in the Field-Weakening Region Based on Model Predictive Control

Abstract
:1. Introduction
- (1)
- The stator flux amplitude reference is optimal in the field-weakening region. This is achieved by the optimal excitation current reference, which is allocated optimally by the voltage closed-loop speed adaptive field-weakening controller.
- (2)
- The torque reference is optimal in the field-weakening region. This is achieved by the optimal torque current reference, which is limited by the maximum current of IM in the constant torque region and constant power region and limited by the maximum slip frequency of IM in the constant voltage region.
- (3)
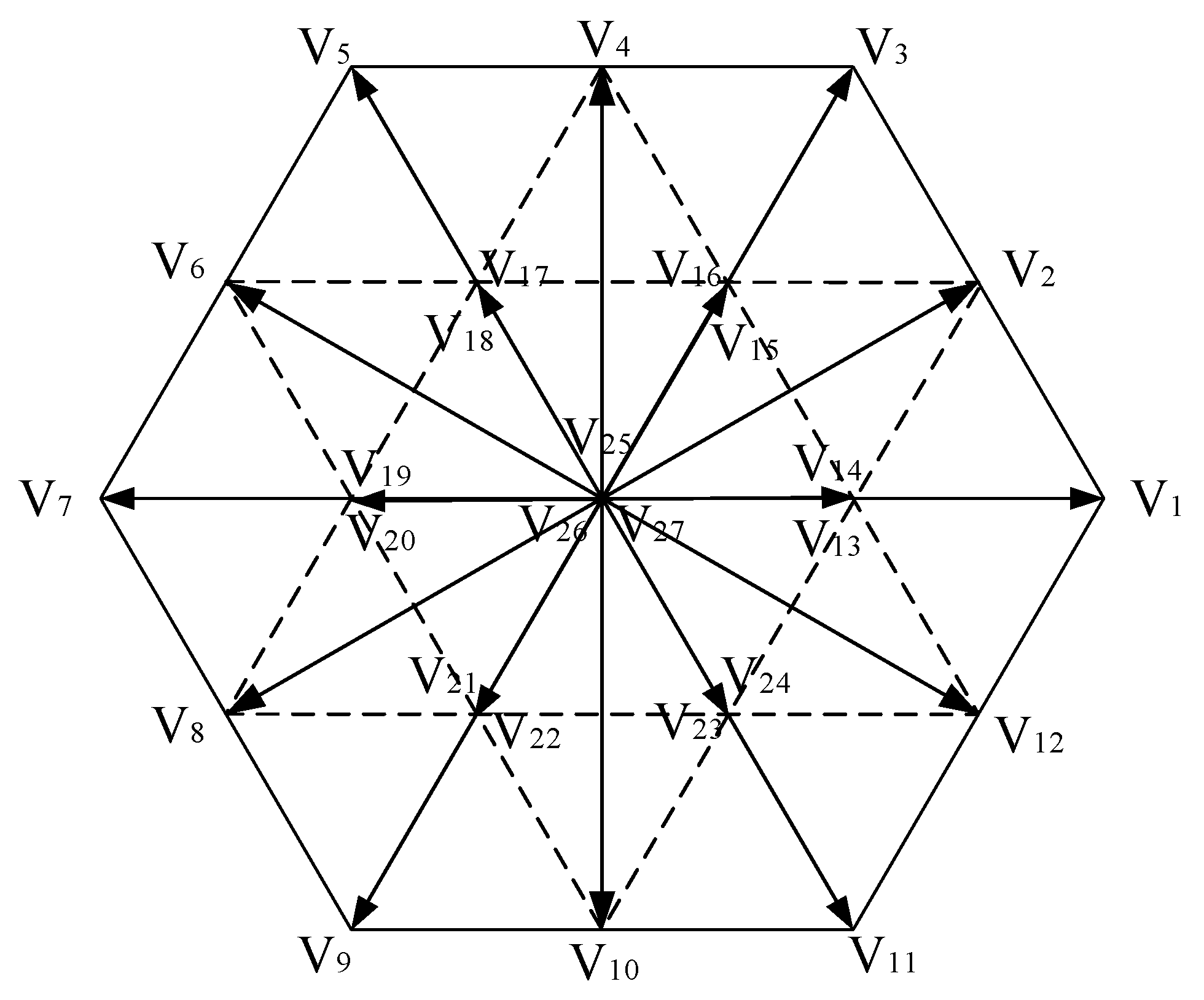
- On the premise of a stable operation, the torque output of IM is the maximum that can be reached in the field-weakening region. This is achieved by the proper selection of voltage vectors because of the optimal references in the cost function.
2. Modeling and Analysis
3. Optimization of Flux and Torque Reference for MPC
3.1. Voltage Closed-Loop Field-Weakening Control Scheme
3.2. Design of Field-Weakening Controller
3.3. Reference Optimization
4. IM Drives Based on MPC with Proposed Field-Weakening Scheme
5. Simulation and Experiment
5.1. Simulation Results
5.2. Experimental Results
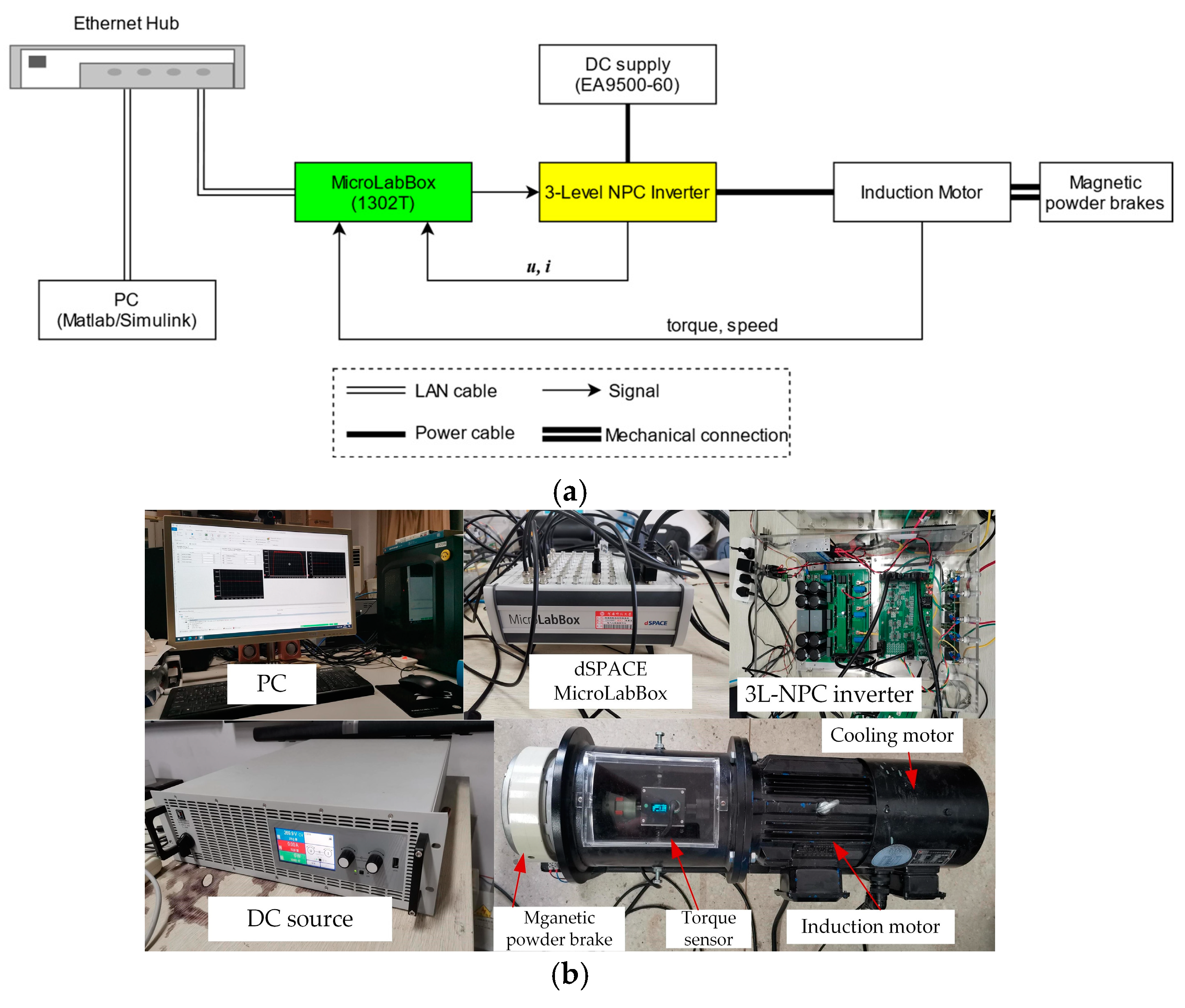
5.2.1. Hardware Setup Scheme
5.2.2. Hardware Components Description
5.2.3. Results Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tousizadeh, M.; Che, H.S.; Selvaraj, J.; Rahim, N.A.; Ooi, B.-T. Performance Comparison of Fault-Tolerant Three-Phase Induction Motor Drives Considering Current and Voltage Limits. IEEE Trans. Ind. Electron. 2019, 66, 2639–2648. [Google Scholar] [CrossRef]
- Karkkainen, H.; Aarniovuori, L.; Niemela, M.; Pyrhonen, J. Converter-Fed Induction Motor Efficiency: Practical Applicability of IEC Methods. IEEE Ind. Electron. Mag. 2017, 11, 45–57. [Google Scholar] [CrossRef]
- Steffen, T.; Rafaq, M.S.; Midgley, W. Comparing Different Resonant Control Approaches for Torque Ripple Minimisation in Electric Machines. Actuators 2022, 11, 349. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model Predictive Control—A Simple and Powerful Method to Control Power Converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive Control for Power Converters and Drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Zhu, J.G.; Zhao, Z.M.; Xu, W.; Dorrell, D.G. An Improved Direct Torque Control for Three-Level Inverter-Fed Induction Motor Sensorless Drive. IEEE Trans. Power Electron. 2012, 27, 1502–1513. [Google Scholar] [CrossRef]
- Hu, H.; Yao, W.; Lu, Z. Design and Implementation of Three-Level Space Vector PWM IP Core for FPGAs. IEEE Trans. Power Electron. 2007, 22, 2234–2244. [Google Scholar] [CrossRef]
- Froisy, B. Model Predictive Control: Past, Present and Future. ISA Trans. 1994, 33, 235–243. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Trans. Ind. Inf. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Akter, M.P.; Lu, D.D.-C.; Zhu, J. Model Predictive Controlled Three-Level Active-Neutral-Point-Clamped Inverter with Improved Computational Speed and Stability, and Balanced DC-Link Voltages. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017. [Google Scholar]
- Sepulchre, R.; Devos, T.; Jadot, F.; Malrait, F. Antiwindup Design for Induction Motor Control in the Field Weakening Domain. IEEE Trans. Contr. Syst. Technol. 2013, 21, 52–66. [Google Scholar] [CrossRef]
- Kim, S.-H.; Sul, S.-K. Voltage Control Strategy for Maximum Torque Operation of an Induction Machine in the Field Weakening Region. IEEE Trans. Ind. Electron. 1997, 44, 512–518. [Google Scholar]
- Xu, X.; Novotny, D.W. Selection of the Flux Reference for Induction Machine Drives in the Field Weakening Region. IEEE Trans. Ind. Appl. 1992, 28, 1353–1358. [Google Scholar] [CrossRef]
- Nisha, G.K.; Lakaparampil, Z.V.; Ushakumari, S. Torque Capability Improvement of Sensorless FOC Induction Machine in Field Weakening for Propulsion Purposes. J. Electr. Syst. Inf. Technol. 2017, 4, 173–184. [Google Scholar]
- Xie, P.; Li, G.; Xie, F.; Hu, C.; Qi, X. Research on Field-Weakening Control of Induction Motor Based on Torque Current Component of the Voltage Closed-Loop. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015. [Google Scholar]
- Sahoo, S.K.; Bhattachrya, T. Field weakening strategy for a vector controlled induction motor drive near the six-step mode of operation. IEEE Trans. Power Electron. 2016, 31, 3043–3051. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, J.; Yu, Y.; Zhang, X.; Xu, D. Unified Complex Vector Field-Weakening Control for Induction Motor High-Speed Drives. IEEE Trans. Power Electron. 2021, 36, 7000–7011. [Google Scholar] [CrossRef]
- Zhang, Y.; Bai, Y.; Yang, H.; Zhang, B. Low Switching Frequency Model Predictive Control of Three-Level Inverter-Fed IM Drives with Speed-Sensorless and Field-Weakening Operations. IEEE Trans. Ind. Electron. 2019, 66, 4262–4272. [Google Scholar] [CrossRef]
- Su, J.; Gao, R.; Husain, I. Model Predictive Control Based Field-Weakening Strategy for Traction EV Used Induction Motor. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016. [Google Scholar]
- Zhang, Y.; Bai, Y.; Yang, H. A Universal Multiple-Vector-Based Model Predictive Control of Induction Motor Drives. IEEE Trans. Power Electron. 2018, 33, 6957–6969. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-Vector-Based Model Predictive Torque Control without Weighting Factors for Induction Motor Drives. IEEE Trans. Power Electron. 2016, 31, 1381–1390. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, B.; Yu, Y.; Zhang, J.; Dong, J.; Xu, D. Analysis and Optimization of Current Dynamic Control in Induction Motor Field-Weakening Region. IEEE Trans. Power Electron. 2020, 35, 8860–8866. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, J.; Yu, Y.; Zhang, X.; Xu, D. Speed Adaptive Voltage Closed-Loop Field-Weakening Control for Induction Motor Drives. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019. [Google Scholar]
- Zhang, Y.; Yang, H.; Xia, B. Model-Predictive Control of Induction Motor Drives: Torque Control Versus Flux Control. IEEE Trans. Ind. Appl. 2016, 52, 4050–4060. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| DC-bus voltage, Udc | 540 V |
| Rotational inertia, J | 0.02 kg·m2 |
| Rated voltage, Un | 380 V |
| Rated power, Pn | 2.2 kW |
| Rated frequency, fn | 50 Hz |
| Rated torque, Tn | 14 N·m |
| Rated speed, n | 1500 rpm |
| Number of pole pairs, np | 2 |
| Stator resistance, Rs | 2.8 Ω |
| Rotor resistance, Rr | 2.5 Ω |
| Stator inductance, Ls | 0.22423 H |
| Rotor inductance, Lr | 0.22423 H |
| Mutual inductance, Lm | 0.2124 H |
| DC-link capacitors, C1, C2 | 680 μF |
| Weighting factor for neutral point balance, Kneu | 35 |
| Weighting factor for switching frequency, Kn | 50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Liu, S.; Zhang, P.; Wang, Y. Torque Increase Strategy for Induction Motor in the Field-Weakening Region Based on Model Predictive Control. Actuators 2023, 12, 395. https://doi.org/10.3390/act12100395
Huang J, Liu S, Zhang P, Wang Y. Torque Increase Strategy for Induction Motor in the Field-Weakening Region Based on Model Predictive Control. Actuators. 2023; 12(10):395. https://doi.org/10.3390/act12100395
Chicago/Turabian StyleHuang, Jingtao, Shuai Liu, Peng Zhang, and Yanan Wang. 2023. "Torque Increase Strategy for Induction Motor in the Field-Weakening Region Based on Model Predictive Control" Actuators 12, no. 10: 395. https://doi.org/10.3390/act12100395