
Recent Developments on Dielectric Barrier Discharge (DBD) Plasma Actuators for Icing Mitigation
 , and
, and 
Abstract
:1. Introduction
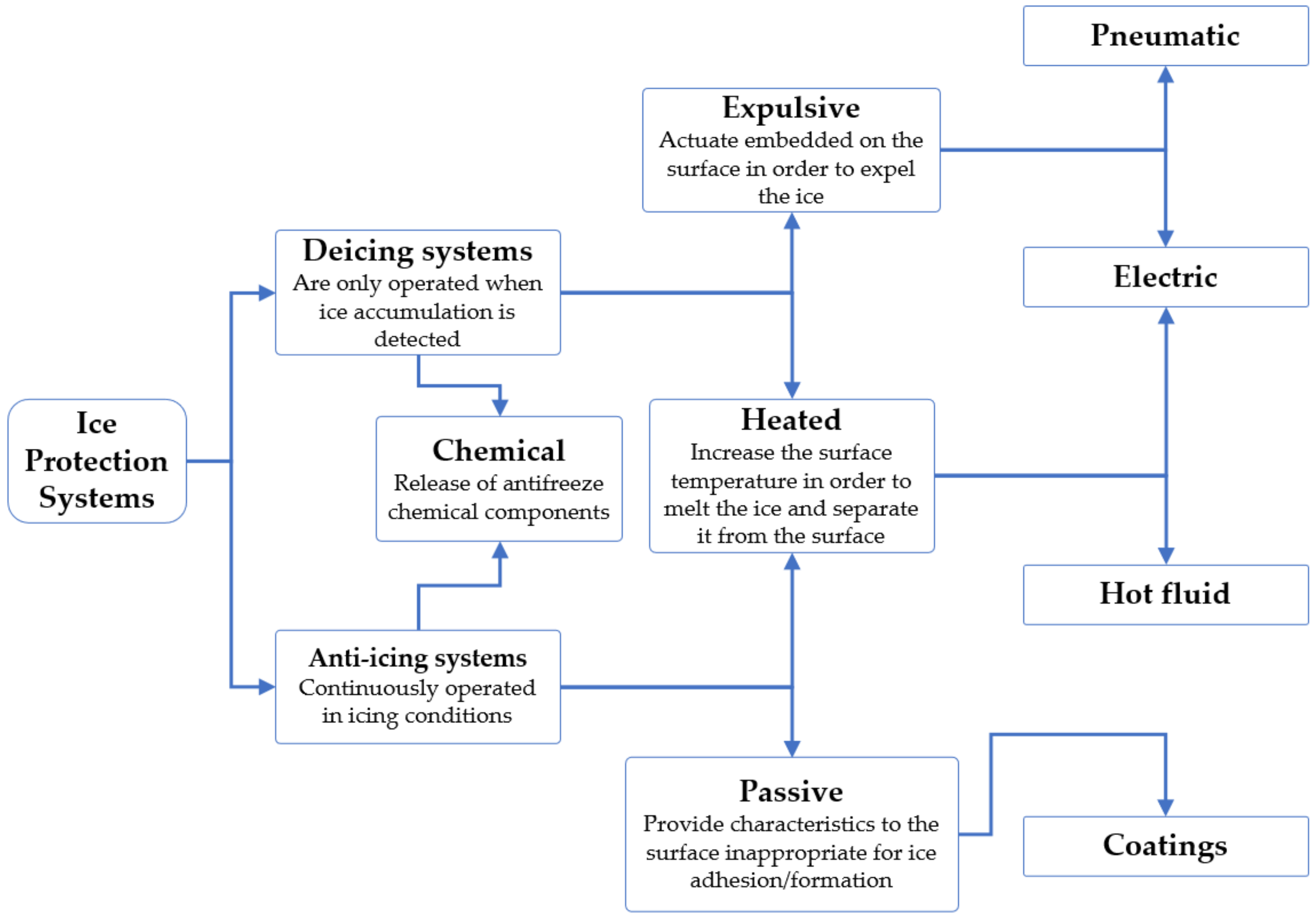
2. Traditional Techniques for Ice Protection Systems
2.1. Traditional Deicing and Anti-Icing Techniques Used in Ice Protection Systems
2.2. Traditional Ice Sensors Used in Ice Protection Systems
3. Dielectric Barrier Discharge Plasma Actuators for Ice Mitigation
3.1. Thermal Effects Induced by Dielectric Barrier Discharge Plasma Actuators
3.2. Plasma Actuators for Deicing and Ice Formation Prevention
3.3. Ice Sensing by Dielectric Barrier Discharge Plasma Actuators
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gohardani, O.; Hammond, D.W. Ice adhesion to pristine and eroded polymer matrix composites reinforced with carbon nanotubes for potential usage on future aircraft. Cold Reg. Sci. Technol. 2013, 96, 8–16. [Google Scholar] [CrossRef]
- Bagherzadeh, S.A.; Asadi, D. Detection of the ice assertion on aircraft using empirical mode decomposition enhanced by multi-objective optimization. Mech. Syst. Signal Process. 2017, 88, 9–24. [Google Scholar] [CrossRef]
- Zilio, C.; Patricelli, L. Aircraft anti-ice system: Evaluation of system performance with a new time dependent mathematical model. Appl. Eng. 2014, 63, 40–51. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, X.; Min, J. Aircraft icing model considering both rime ice property variability and runback water effect. Int. J. Heat Mass Transf. 2017, 104, 510–516. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, J.; Yin, J. Numerical simulation of three-dimensional ice accretion on an aircraft wing. Int. J. Heat Mass Transf. 2016, 92, 34–54. [Google Scholar] [CrossRef]
- Hu, T.; Lv, H.; Tian, B.; Su, D. Choosing Critical Ice Shapes on Airfoil Surface for the Icing Certification of Aircraft. Procedia Eng. 2014, 80, 456–466. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Qu, K.; Cai, J.; Pan, S. A three-dimensional aircraft ice accretion model based on the numerical solution of the unsteady Stefan problem. Aerosp. Sci. Technol. 2019, 93, 105328. [Google Scholar] [CrossRef]
- Zhang, X.; Min, J.; Wu, X. Model for aircraft icing with consideration of property-variable rime ice. Int. J. Heat Mass Transf. 2016, 97, 185–190. [Google Scholar] [CrossRef]
- Cao, Y.; Ma, C.; Zhang, Q.; Sheridan, J. Numerical simulation of ice accretions on an aircraft wing. Aerosp. Sci. Technol. 2012, 23, 296–304. [Google Scholar] [CrossRef]
- Deng, H.; Chang, S.; Song, M. The optimization of simulated icing environment by adjusting the arrangement of nozzles in an atomization equipment for the anti-icing and deicing of aircrafts. Int. J. Heat Mass Transf. 2020, 155, 119720. [Google Scholar] [CrossRef]
- Rodríguez-Sanz, Á.; Valdés, R.A.; Comendador, F.G.; Ayra, E.S.; Cancela, J.C. Total air temperature anomalies as a metric for detecting high-altitude ice crystal events: Development of a failure indicator heuristic. Eng. Fail Anal. 2019, 105, 982–1005. [Google Scholar] [CrossRef]
- Bucknell, A.; McGilvray, M.; Gillespie, D.R.H.; Jones, G.; Collier, B. A thermodynamic model for ice crystal accretion in aircraft engines: EMM-C. Int. J. Heat Mass Transf. 2021, 174, 121270. [Google Scholar] [CrossRef]
- Wang, Q.; Yi, X.; Liu, Y.; Ren, J.; Li, W.; Wang, Q.; Lai, Q. Simulation and analysis of wind turbine ice accretion under yaw condition via an Improved Multi-Shot Icing Computational Model. Renew. Energy 2020, 162, 1854–1873. [Google Scholar] [CrossRef]
- Ali, Q.S.; Kim, M.H. Design and performance analysis of an airborne wind turbine for high-altitude energy harvesting. Energy 2021, 230, 120829. [Google Scholar] [CrossRef]
- Fortin, G.; Perron, J.; Ilinca, A. Behaviour and Modeling of Cup Anemometers under Icing Conditions. In Proceedings of the 11th International Workshop on Atmospheric Icing of Structures (IWAIS), Montreal, QC, Canada, 13–16 June 2005. [Google Scholar]
- Manatbayev, R.; Baizhuma, Z.; Bolegenova, S.; Georgiev, A. Numerical simulations on static Vertical Axis Wind Turbine blade icing. Renew. Energy 2021, 170, 997–1007. [Google Scholar] [CrossRef]
- Parent, O.; Ilinca, A. Anti-icing and de-icing techniques for wind turbines: Critical review. Cold Reg. Sci. Technol. 2011, 65, 88–96. [Google Scholar] [CrossRef]
- Tao, T.; Liu, Y.; Qiao, Y.; Gao, L.; Lu, J.; Zhang, C.; Wang, Y. Wind turbine blade icing diagnosis using hybrid features and Stacked-XGBoost algorithm. Renew. Energy 2021, 180, 1004–1013. [Google Scholar] [CrossRef]
- Stoyanov, D.B.; Nixon, J.D.; Sarlak, H. Analysis of derating and anti-icing strategies for wind turbines in cold climates. Appl. Energy 2021, 288, 116610. [Google Scholar] [CrossRef]
- Cheng, X.; Shi, F.; Liu, Y.; Liu, X.; Huang, L. Wind turbine blade icing detection: A federated learning approach. Energy 2022, 254, 124441. [Google Scholar] [CrossRef]
- Wei, K.; Yang, Y.; Zuo, H.; Zhong, D. A review on ice detection technology and ice elimination technology for wind turbine. Wind Energy 2020, 23, 433–457. [Google Scholar] [CrossRef]
- Yirtici, O.; Tuncer, I.H. Aerodynamic shape optimization of wind turbine blades for minimizing power production losses due to icing. Cold Reg. Sci. Technol. 2021, 185, 103250. [Google Scholar] [CrossRef]
- Baizhuma, Z.; Kim, T.; Son, C. Numerical method to predict ice accretion shapes and performance penalties for rotating vertical axis wind turbines under icing conditions. J. Wind Eng. Ind. Aerodyn. 2021, 216, 104708. [Google Scholar] [CrossRef]
- Benmoussa, A.; Páscoa, J.C. Enhancement of a cycloidal self-pitch vertical axis wind turbine performance through DBD plasma actuators at low tip speed ratio. Int. J. Thermofluids 2023, 17, 100258. [Google Scholar] [CrossRef]
- Benmoussa, A.; Páscoa, J.C. Performance improvement and start-up characteristics of a cyclorotor using multiple plasma actuators. Meccanica 2021, 56, 2707–2730. [Google Scholar] [CrossRef]
- Rodrigues, F.; Páscoa, J.C.; Dias, F.; Abdollahzadeh, M. Plasma Actuators for Boundary Layer Control of Next Generation Nozzles. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition. Proceedings (IMECE), Phoenix, AZ, USA, 11–17 November 2016. [Google Scholar] [CrossRef]
- Rodrigues, F.; Mushyam, A.; Pascoa, J.; Trancossi, M. A new plasma actuator configuration for improved efficiency: The stair-shaped dielectric barrier discharge actuator. J. Phys. D Appl. Phys. 2019, 52, 385201. [Google Scholar] [CrossRef]
- Zhou, W.; Liu, Y.; Hu, H.; Hu, H.; Meng, X. Utilization of Thermal Effect Induced by Plasma Generation for Aircraft Icing Mitigation. AIAA J. 2018, 56, 1097–1104. [Google Scholar] [CrossRef]
- Cai, J.; Tian, Y.; Meng, X.; Han, X.; Zhang, D.; Hu, H. An experimental study of icing control using DBD plasma actuator. Exp. Fluids 2017, 58, 1–8. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.; Rodrigues, F.; Pascoa, J.C. Simultaneous ice detection and removal based on dielectric barrier discharge actuators. Sens. Actuators A Phys. 2020, 315, 112361. [Google Scholar] [CrossRef]
- Cao, Y.; Wu, Z.; Su, Y.; Xu, Z. Aircraft flight characteristics in icing conditions. Prog. Aerosp. Sci. 2015, 74, 62–80. [Google Scholar] [CrossRef]
- Cao, Y.; Tan, W.; Wu, Z. Aircraft icing: An ongoing threat to aviation safety. Aerosp. Sci. Technol. 2018, 75, 353–385. [Google Scholar] [CrossRef]
- Khadak, A.; Subeshan, B.; Asmatulu, R. Studies on de-icing and anti-icing of carbon fiber-reinforced composites for aircraft surfaces using commercial multifunctional permanent superhydrophobic coatings. J. Mater. Sci. 2021, 56, 3078–3094. [Google Scholar] [CrossRef]
- Drury, M.D.; Szefi, J.T.; Palacios, J.L. Full-Scale Testing of a Centrifugally Powered Pneumatic De-Icing System for Helicopter Rotor Blades. J. Aircr. 2016, 54, 220–228. [Google Scholar] [CrossRef]
- Shinkafi, A.; Lawson, C. Enhanced Method of Conceptual Sizing of Aircraft Electro-Thermal De-icing System. Int. J. Aerosp. Mech. Eng. 2014, 8, 1073–1080. [Google Scholar] [CrossRef]
- Mohseni, M.; Amirfazli, A. A novel electro-thermal anti-icing system for fiber-reinforced polymer composite airfoils. Cold Reg. Sci. Technol. 2013, 87, 47–58. [Google Scholar] [CrossRef]
- Ibrahim, Y.; Kempers, R.; Amirfazli, A. 3D printed electro-thermal anti- or de-icing system for composite panels. Cold Reg. Sci. Technol. 2019, 166, 102844. [Google Scholar] [CrossRef]
- Kaj, O.; Larsen, F.M.; Grabau, P.; Jespersen, J.E. Wind Turbine Blade with a System for Deicing and Lightning Protection. U.S. Patent 6,612,810, 2 September 2003. [Google Scholar]
- Huang, X.; Tepylo, N.; Pommier-Budinger, V.; Budinger, M.; Bonaccurso, E.; Villedieu, P.; Bennani, L. A survey of icephobic coatings and their potential use in a hybrid coating/active ice protection system for aerospace applications. Prog. Aerosp. Sci. 2019, 105, 74–97. [Google Scholar] [CrossRef] [Green Version]
- Olson, R.A.; Loyal, M.; Hanson, M. Electro-Expulsive De-Icing System for Aircraft and Other Applications. U.S. Patent 9,108,735, 5 February 2010. [Google Scholar]
- Ingram, R.; Codner, G.; Gerardi, J. Electro-Magnetic Expulsion De-Icing System. U.S. Patent 5,782,435, 21 July 1997. [Google Scholar]
- Shin, J.; Bond, T. Surface roughness due to residual ice in the use of low power deicing systems. In Proceedings of the 31st Aerospace Sciences Meeting, Reno, NV, USA, 11–14 January 1993. [Google Scholar] [CrossRef] [Green Version]
- Goraj, Z. An Overview of the Deicing and Antiicing Technologies with Prospects for the Future. In Proceedings of the 24th International Congress of the Aeronautical Sciences, Yokohama, Japan, 29 August–3 September 2004. [Google Scholar]
- Al-Khalil, K. Thermo-mechanical expulsion deicing system-TMEDS. In Proceedings of the Collection of Technical Papers—45th AIAA Aerospace Sciences Meeting, Reno, NV, USA, 8–11 January 2007; Volume 12, pp. 8562–8574. [Google Scholar] [CrossRef] [Green Version]
- Palacios, J.; Smith, E.; Rose, J.; Royer, R. Ultrasonic De-Icing of Wind-Tunnel Impact Icing. J. Aircr. 2012, 48, 1020–1027. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Y.; Huang, Q. Progress on ultrasonic guided waves de-icing techniques in improving aviation energy efficiency. Renew. Sustain. Energy Rev. 2017, 79, 638–645. [Google Scholar] [CrossRef]
- Palacios, J.L.; Zhu, Y.; Smith, E.C.; Rose, J.L. Ultrasonic shear and lamb wave interface stress for helicopter rotor de-icing purposes. In Proceedings of the 47th Structures, Structural Dynamics and Materials Conference, Newport, RI, USA, 1–4 May 2006; Volume 11, pp. 8131–8142. [Google Scholar] [CrossRef]
- Wang, Z. Recent progress on ultrasonic de-icing technique used for wind power generation, high-voltage transmission line and aircraft. Energy Build. 2017, 140, 42–49. [Google Scholar] [CrossRef]
- Palacios, J.L.; Gao, H.; Smith, E.C.; Rose, J.L. Ultrasonic shear wave anti-icing system for helicopter rotor blades. In Proceedings of the Annual Forum Proceedings-AHS International. III, Phoenix, AZ, USA, 9–11 May 2006; pp. 1492–1502. [Google Scholar] [CrossRef]
- Budinger, M.; Pommier-Budinger, V.; Napias, G.; da Silva, A.C. Ultrasonic Ice Protection Systems: Analytical and Numerical Models for Architecture Tradeoff. J. Aircr. 2016, 53, 680–690. [Google Scholar] [CrossRef] [Green Version]
- Myose, R.Y.; Horn, W.J.; Hwang, Y.; Herrero, J.; Huynh, C.; Boudraa, T. Application of Shape Memory Alloys for Leading Edge Deicing; SAE Technical Papers; SAE: Warrendale, PA, USA, 1999. [Google Scholar] [CrossRef]
- Gerardi, J.J.; Ingram, R.B.; Catarella, R.A. A shape memory alloy based de-icing system for aircraft. In Proceedings of the 33rd Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 1995; pp. 1–8. [Google Scholar] [CrossRef]
- Sullivan, D.B.; Righi, F.; Hartl, D.J.; Rogers, J. Shape memory alloy rotor blade deicing. In Proceedings of the 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Boston, MA, USA, 8–11 April 2013. [Google Scholar] [CrossRef]
- Ilinca, A.; Ilinca, A. Analysis and Mitigation of Icing Effects on Wind Turbines. Wind Turbines 2011. [Google Scholar] [CrossRef] [Green Version]
- Dalili, N.; Edrisy, A.; Carriveau, R. A review of surface engineering issues critical to wind turbine performance. Renew. Sustain. Energy Rev. 2009, 13, 428–438. [Google Scholar] [CrossRef]
- Zumwalt, G.; Friedberg, R. Designing an electro-impulse de-icing system. In Proceedings of the 24th Aerospace Sciences Meeting, Reno, NV, USA, 6–9 January 1986. [Google Scholar] [CrossRef]
- Sommerwerk, H.; Horst, P.; Bansmer, S. Studies on electro impulse de-icing of a leading edge structure in an icing wind tunnel. In Proceedings of the 8th AIAA Atmospheric and Space Environments Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, Y. Studies on the Electro-Impulse De-Icing System of Aircraft. Aerospace 2019, 6, 67. [Google Scholar] [CrossRef] [Green Version]
- Goehner, R.; Glover, N.; Hensley, D. Electro-Impulse De-Icing System for Aircraft. U.S. Patent 4,678,144, 7 July 1984. [Google Scholar]
- Endres, M.; Sommerwerk, H.; Mendig, C.; Sinapius, M.; Horst, P. Experimental study of two electro-mechanical de-icing systems applied on a wing section tested in an icing wind tunnel. CEAS Aeronaut. J. 2017, 8, 429–439. [Google Scholar] [CrossRef]
- Sørensen, K.L.; Helland, A.S.; Johansen, T.A. Carbon nanomaterial-based wing temperature control system for in-flight anti-icing and de-icing of unmanned aerial vehicles. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar] [CrossRef] [Green Version]
- Vertuccio, L.; de Santis, F.; Pantani, R.; Lafdi, K.; Guadagno, L. Effective de-icing skin using graphene-based flexible heater. Compos. B Eng. 2019, 162, 600–610. [Google Scholar] [CrossRef]
- Pellissier, M.P.C.; Habashi, W.G.; Pueyo, A. Optimization via FENSAP-ICE of Aircraft Hot-Air Anti-Icing Systems. J. Aircr. 2012, 48, 265–276. [Google Scholar] [CrossRef]
- Zhang, F.; Deng, W.; Nan, H.; Zhang, L.; Huang, Z. Reliability analysis of bleed air anti-icing system based on subset simulation method. Appl. Eng. 2017, 115, 17–21. [Google Scholar] [CrossRef]
- Federal Aviation Administration. Aviation Maintenance Technician Handbook-Airframe Volume 2. Available online: https://www.faa.gov/handbooksmanuals/aviation/aviation-maintenance-technician-handbook-airframe-volume-2 (accessed on 2 November 2022).
- Domingos, R.H.; Papadakis, M.; Zamora, A.O. Computational methodology for bleed air ice protection system parametric analysis. In Proceedings of the AIAA Atmospheric and Space Environments Conference, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar] [CrossRef]
- Su, Q.; Chang, S.; Zhao, Y.; Zheng, H.; Dang, C. A review of loop heat pipes for aircraft anti-icing applications. Appl. Eng. 2018, 130, 528–540. [Google Scholar] [CrossRef]
- Hem, L.J.; Weideborg, M.; Schram, E. Degradation and toxicity of additives to aircraft de-icing fluids; the effect of discharge of such fluids to municipal wastewater treatment plants. Proc. Water Environ. Fed. 2000, 2000, 419–433. [Google Scholar] [CrossRef]
- Wang, Y.; Hudson, N.E.; Pethrick, R.A.; Schaschke, C.J. Poly(acrylic acid)–poly(vinyl pyrrolidone)-thickened water/glycol de-icing fluids. Cold Reg. Sci. Technol. 2014, 101, 24–30. [Google Scholar] [CrossRef]
- Louchez, P.R.; Bernardin, S.; Laforte, J.L. Physical properties of aircraft de-icing and anti-icing fluids. In Proceedings of the 36th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 12–15 January 1998. [Google Scholar] [CrossRef]
- Fakorede, O.; Feger, Z.; Ibrahim, H.; Ilinca, A.; Perron, J.; Masson, C. Ice protection systems for wind turbines in cold climate: Characteristics, comparisons and analysis. Renew. Sustain. Energy Rev. 2016, 65, 662–675. [Google Scholar] [CrossRef]
- Fortin, G. Super-Hydrophobic Coatings as a Part of the Aircraft Ice Protection System; SAE Technical Papers; SAE: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Latthe, S.S.; Sutar, R.S.; Bhosale, A.K.; Nagappan, S.; Ha, C.S.; Sadasivuni, K.K.; Liu, S.; Xing, R. Recent developments in air-trapped superhydrophobic and liquid-infused slippery surfaces for anti-icing application. Prog. Org. Coat. 2019, 137, 105373. [Google Scholar] [CrossRef]
- Zhao, Z.; Chen, H.; Zhu, Y.; Liu, X.; Wang, Z.; Chen, J. A robust superhydrophobic anti-icing/de-icing composite coating with electrothermal and auxiliary photothermal performances. Compos. Sci. Technol. 2022, 227, 109578. [Google Scholar] [CrossRef]
- Guo, H.; Liu, M.; Xie, C.; Zhu, Y.; Sui, X.; Wen, C.; Li, Q.; Zhao, W.; Yang, J.; Zhang, L. A sunlight-responsive and robust anti-icing/deicing coating based on the amphiphilic materials. Chem. Eng. J. 2020, 402, 126161. [Google Scholar] [CrossRef]
- Liu, G.; Xu, J.; Chen, T.; Wang, K. Progress in thermoplasmonics for solar energy applications. Phys Rep. 2022, 981, 1–50. [Google Scholar] [CrossRef]
- Liu, G.; Xu, J.; Wang, K. Solar water evaporation by black photothermal sheets. Nano Energy 2017, 41, 269–284. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, G.; Wu, S.; Alsaid, Y.; Zhao, W.; Yan, X.; Liu, L.; Zou, G.; Lv, J.; He, X.; et al. Solar anti-icing surface with enhanced condensate self-removing at extreme environmental conditions. Proc. Natl. Acad. Sci. USA 2021, 118, e2100978118. [Google Scholar] [CrossRef]
- Sheng, S.; Zhu, Z.; Wang, Z.; Hao, T.; He, Z.; Wang, J. Bioinspired solar anti-icing/de-icing surfaces based on phase-change materials. Sci. China Mater. 2021, 65, 1369–1376. [Google Scholar] [CrossRef]
- Wu, C.; Geng, H.; Tan, S.; Lv, J.; Wang, H.; He, Z.; Wang, J. Highly efficient solar anti-icing/deicing via a hierarchical structured surface. Mater. Horiz. 2020, 7, 2097–2104. [Google Scholar] [CrossRef]
- Liu, G.; Chen, T.; Xu, J.; Yao, G.; Xie, J.; Cheng, Y.; Miao, Z.; Wang, K. Salt-Rejecting Solar Interfacial Evaporation. Cell Rep. Phys. Sci. 2021, 2, 100310. [Google Scholar] [CrossRef]
- Virk, M. Atmospheric Icing Sensors—An insight. In Proceedings of the Seventh International Conference on Sensor Technologies and Applications, Barcelona, Spain, 25–31 August 2013. [Google Scholar] [CrossRef]
- Codner, G.W.; Pruzan, D.A.; Rauckhorst, R.L., III; Reich, A.D.; Sweet, D.B. Impedance Type Ice Detector. U.S. Patent 5,955,887, 20 December 1996. [Google Scholar]
- Mughal, U.N.; Virk, M.S.; Mustafa, M.Y. Dielectric based sensing of atmospheric ice. AIP Conf. Proc. 2013, 1570, 212. [Google Scholar] [CrossRef]
- Wang, P.; Zhou, W.; Bao, Y.; Li, H. Ice monitoring of a full-scale wind turbine blade using ultrasonic guided waves under varying temperature conditions. Struct. Control Health Monit. 2018, 25, e2138. [Google Scholar] [CrossRef]
- Homola, M.C.; Nicklasson, P.J.; Sundsbø, P.A. Ice sensors for wind turbines. Cold Reg. Sci. Technol. 2006, 46, 125–131. [Google Scholar] [CrossRef]
- Mughal, U.N.; Virk, M.S.; Mustafa, M. State of the Art Review of Atmospheric Icing Sensors. Sens. Transducers 2016, 198, 2–15. Available online: https://munin.uit.no/handle/10037/11740 (accessed on 2 November 2022).
- Jiang, J.H.; Wu, D.L. Ice and water permittivities for millimeter and sub-millimeter remote sensing applications. Atmos. Sci. Lett. 2004, 5, 146–151. [Google Scholar] [CrossRef]
- Madi, E.; Pope, K.; Huang, W.; Iqbal, T. A review of integrating ice detection and mitigation for wind turbine blades. Renew. Sustain. Energy Rev. 2019, 103, 269–281. [Google Scholar] [CrossRef]
- Páscoa, J.C.; Rodrigues, F.F.; Das, S.S.; Abdollahzadeh, M.; Dumas, A.; Trancossi, M.; Subhash, M. Exit Flow Vector Control on a Coanda Nozzle Using Dielectric Barrier Discharge Actuator. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition Proceedings (IMECE), Houston, TX, USA, 15–18 November 2015. [Google Scholar] [CrossRef]
- Mushyam, A.; Rodrigues, F.; Pascoa, J.C. A plasma-fluid model for EHD flow in DBD actuators and experimental validation. Int. J. Numer. Methods Fluids 2019, 90, 115–139. [Google Scholar] [CrossRef]
- Nunes-Pereira, J.; Rodrigues, F.F.; Abdollahzadehsangroudi, M.; Páscoa, J.C.; Lanceros-Mendez, S. Improved performance of polyimide Cirlex-based dielectric barrier discharge plasma actuators for flow control. Polym. Adv. Technol. 2022, 33, 1278–1290. [Google Scholar] [CrossRef]
- Corke, T.C.; Post, M.L.; Orlov, D.M. Single dielectric barrier discharge plasma enhanced aerodynamics: Physics, modeling and applications. Exp. Fluids 2009, 46, 1–26. [Google Scholar] [CrossRef]
- Font, G.I.; Enloe, C.L.; McLaughlin, T.E. Plasma Volumetric Effects on the Force Production of a Plasma Actuator. AIAA J. 2012, 48, 1869–1874. [Google Scholar] [CrossRef]
- Benmoussa, A.; Páscoa, J.C. Cycloidal rotor coupled with DBD plasma actuators for performance improvement. Aerosp. Sci. Technol. 2021, 110, 106468. [Google Scholar] [CrossRef]
- Ferry, J.W.; Rovey, J.L. Thrust measurement of dielectric barrier discharge plasma actuators and power requirements for aerodynamic control. In Proceedings of the 5th Flow Control Conference, Chicago, IL, USA, 28 June–1 July 2010. [Google Scholar] [CrossRef] [Green Version]
- Houser, N.M.; Gimeno, L.; Hanson, R.E.; Goldhawk, T.; Simpson, T.; Lavoie, P. Microfabrication of dielectric barrier discharge plasma actuators for flow control. Sens. Actuators A Phys. 2013, 201, 101–104. [Google Scholar] [CrossRef]
- Rodrigues, F.; Pascoa, J.; Trancossi, M. Heat generation mechanisms of DBD plasma actuators. Exp. Fluid Sci. 2018, 90, 55–65. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Corke, T.C.; Patel, M.P. Plasma Flaps and Slats: An Application of Weakly Ionized Plasma Actuators. J. Aircr. 2012, 46, 864–873. [Google Scholar] [CrossRef]
- Mertz, B.E.; Corke, T.C. Time-dependent dielectric barrier dishcharge plasma actuator modeling. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009. [Google Scholar] [CrossRef]
- Durscher, R.; Roy, S. Novel multi-barrier plasma actuators for increased thrust. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010. [Google Scholar] [CrossRef] [Green Version]
- Wilkinson, S.P.; Siochi, E.J.; Sauti, G.; Xu, T.B.; Meador, M.A.; Guo, H. Evaluation of dielectric-barrier-discharge actuator substrate materials. In Proceedings of the 45th AIAA Plasmadynamics and Lasers Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar] [CrossRef] [Green Version]
- Benard, N.; Jolibois, J.; Moreau, E. Lift and drag performances of an axisymmetric airfoil controlled by plasma actuator. J. Electrostat. 2009, 67, 133–139. [Google Scholar] [CrossRef]
- Zhao, G.Y.; Li, Y.H.; Liang, H.; Han, M.H.; Hua, W.Z. Control of vortex on a non-slender delta wing by a nanosecond pulse surface dielectric barrier discharge. Exp. Fluids 2015, 56, 1–9. [Google Scholar] [CrossRef]
- Jayaraman, B.; Cho, Y.C.; Shyy, W. Modeling of dielectric barrier discharge plasma actuator. J. Appl. Phys. 2008, 103, 053304. [Google Scholar] [CrossRef]
- Xiao, D.; Borradaile, H.; Choi, K.S.; Feng, L.; Wang, J.; Mao, X. Bypass transition in a boundary layer flow induced by plasma actuators. J. Fluid Mech. 2021, 929, A6. [Google Scholar] [CrossRef]
- Pescini, E.; Suma, A.; de Giorgi, M.G.; Francioso, L.; Ficarella, A. Optimization of Plasma Actuator Excitation Waveform and Materials for Separation Control in Turbomachinery. Energy Procedia 2017, 126, 786–793. [Google Scholar] [CrossRef]
- De Giorgi, M.G.; Ficarella, A.; Marra, F.; Pescini, E. Micro DBD plasma actuators for flow separation control on a low pressure turbine at high altitude flight operating conditions of aircraft engines. Appl. Eng. 2017, 114, 511–522. [Google Scholar] [CrossRef]
- Roth, J.R.; Dai, X. Optimization of the aerodynamic plasma actuator as an electrohydrodynamic (EHD) electrical device. In Proceedings of the Collection of Technical Papers-44th AIAA Aerospace Sciences Meeting, Reno, NV, USA, 9–12 January 2006; Volume 19, pp. 14604–14631. [Google Scholar] [CrossRef]
- Moreau, E.; Sosa, R.; Artana, G. Electric wind produced by surface plasma actuators: A new dielectric barrier discharge based on a three-electrode geometry. J. Phys. D Appl. Phys. 2008, 41, 115204. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.; Rodrigues, F.; Nunes-Pereira, J.; Pascoa, J.C.; Pires, L. Parametric optimization of surface dielectric barrier discharge actuators for ice sensing application. Sens. Actuators A Phys. 2022, 335, 113391. [Google Scholar] [CrossRef]
- Erfani, R.; Erfani, T.; Utyuzhnikov, S.V.; Kontis, K. Optimisation of multiple encapsulated electrode plasma actuator. Aerosp. Sci. Technol. 2013, 26, 120–127. [Google Scholar] [CrossRef]
- Huang, J.; Corke, T.C.; Thomas, F.O. Unsteady Plasma Actuators for Separation Control of Low-Pressure Turbine Blades. AIAA J. 2012, 44, 1477–1487. [Google Scholar] [CrossRef]
- Rodrigues, F.F.; Pereira, J.N.; Abdollahzadeh, M.; Pascoa, J.; Mendez, S.L. Comparative Evaluation of Dielectric Materials for Plasma Actuators Active Flow Control and Heat Transfer Applications. In Proceedings of the ASME 2021 Fluids Engineering Division Summer Meeting, Virtual, 10–12 August 2021; Volume 3. [Google Scholar] [CrossRef]
- Mertz, B.E.; Corke, T.C. Single-dielectric barrier discharge plasma actuator modelling and validation. J. Fluid Mech. 2011, 669, 557–583. [Google Scholar] [CrossRef]
- Roupassov, D.V.; Nikipelov, A.A.; Nudnova, M.M.; Starikovskii, A.Y. Flow Separation Control by Plasma Actuator with Nanosecond Pulsed-Periodic Discharge. AIAA J. 2012, 47, 168–185. [Google Scholar] [CrossRef]
- Rodrigues, F.F.; Pascoa, J.C. Implementation of stair-shaped dielectric layers in micro- and macroplasma actuators for increased efficiency and lifetime. J. Fluids Eng. Trans. ASME 2020, 142, 104502. [Google Scholar] [CrossRef]
- Rodrigues, F.; Abdollahzadeh, M.; Pascoa, J.C.; Oliveira, P.J. An experimental study on segmented-encapsulated electrode dielectric-barrier-discharge plasma actuator for mapping ice formation on a surface: A conceptual analysis. J. Heat Transfer 2021, 143, 011701. [Google Scholar] [CrossRef]
- Wei, B.; Wu, Y.; Liang, H.; Zhu, Y.; Chen, J.; Zhao, G.; Song, H.; Jia, M.; Xu, H. SDBD based plasma anti-icing: A stream-wise plasma heat knife configuration and criteria energy analysis. Int. J. Heat Mass Transf. 2019, 138, 163–172. [Google Scholar] [CrossRef]
- Santhanakrishnan, A.; Jacob, J.D. Flow control with plasma synthetic jet actuators. J. Phys. D Appl. Phys. 2007, 40, 637. [Google Scholar] [CrossRef]
- Segawa, T.; Furutani, H.; Yoshida, H.; Jukes, T.; Choi, K.S. Wall normal jet under elevated temperatures produced by surface plasma actuator. In Proceedings of the Collection of Technical Papers-45th AIAA Aerospace Sciences Meeting, Reno, NV, USA, 8–11 January 2007; Volume 14, pp. 9611–9618. [Google Scholar] [CrossRef]
- Roy, S.; Wang, C.-C. Bulk flow modification with horseshoe and serpentine plasma actuators. J. Phys. D Appl. Phys. 2008, 42, 032004. [Google Scholar] [CrossRef]
- Riherd, M.; Roy, S. Serpentine geometry plasma actuators for flow control. J. Appl. Phys. 2013, 114, 083303. [Google Scholar] [CrossRef] [Green Version]
- Cattafesta, L.N.; Sheplak, M. Actuators for Active Flow Control. Annu. Rev. Fluid Mech. 2011, 43, 247–272. [Google Scholar] [CrossRef] [Green Version]
- Kotsonis, M.; Veldhuis, L. Experimental study on dielectric barrier discharge actuators operating in pulse mode. J. Appl. Phys. 2010, 108, 113304. [Google Scholar] [CrossRef] [Green Version]
- Corke, T.C.; Enloe, C.L.; Wilkinson, S.P. Dielectric Barrier Discharge Plasma Actuators for Flow Control. Annu. Rev. Fluid Mech. 2009, 42, 505–529. [Google Scholar] [CrossRef]
- Pendar, M.-R.; Páscoa, J.C. Numerical Investigation of Plasma Actuator Effects on Flow Control Over a Three-Dimensional Airfoil with a Sinusoidal Leading Edge. J. Fluids Eng. 2022, 144, 081208. [Google Scholar] [CrossRef]
- Pendar, M.R.; Pascoa, J. Study of the Plasma Actuator Effect on the Flow Characteristics of an Airfoil: An LES Investigation. SAE Int. J. Adv. Curr. Pract. Mobil. 2021, 3, 1206–1215. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.; Rodrigues, F.; Pascoa, J.C.; Oliveira, P.J. Numerical design and analysis of a multi-DBD actuator configuration for the experimental testing of ACHEON nozzle model. Aerosp. Sci. Technol. 2015, 41, 259–273. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.; Páscoa, J.C.; Oliveira, P.J. Modified split-potential model for modeling the effect of DBD plasma actuators in high altitude flow control. Curr. Appl. Phys. 2014, 14, 1160–1170. [Google Scholar] [CrossRef]
- Amanifard, N.; Abdollahzadeh, M.; Moayedi, H.; Pascoa, J.C. An explicit CFD model for the DBD plasma actuators using wall-jet similarity approach. J. Electrostat. 2020, 107, 103497. [Google Scholar] [CrossRef]
- Bouremel, Y.; Li, J.M.; Zhao, Z.; Debiasi, M. Effects of AC Dielectric Barrier Discharge Plasma Actuator Location on Flow Separation and Airfoil Performance. Procedia Eng. 2013, 67, 270–278. [Google Scholar] [CrossRef] [Green Version]
- Kelley, C.L.; Bowles, P.; Cooney, J.; He, C.; Corke, T.C.; Osborne, B.; Silkey, J.; Zehnle, J. High Mach number leading-edge flow separation control using AC DBD plasma actuators. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012. [Google Scholar] [CrossRef]
- Durasiewicz, C.; Singh, A.; Little, J.C. A Comparative Flow Physics Study of Ns-DBD vs Ac-DBD Plasma Actuators for Transient Separation Control on a NACA 0012 Airfoil. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Naghib-Lahouti, A.; Hangan, H.; Lavoie, P. Distributed forcing flow control in the wake of a blunt trailing edge profiled body using plasma actuators. Phys. Fluids 2015, 27, 035110. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, X. Streamwise and spanwise plasma actuators for flow-induced cavity noise control. Phys. Fluids 2008, 20, 037101. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Zhang, X. Plasma Actuators for Noise Control. Int. J. Aeroacoustics 2010, 9, 679–703. [Google Scholar] [CrossRef]
- Grundmann, S.; Tropea, C. Experimental transition delay using glow-discharge plasma actuators. Exp. Fluids 2007, 42, 653–657. [Google Scholar] [CrossRef]
- Grundmann, S.; Tropea, C. Active cancellation of artificially introduced Tollmien-Schlichting waves using plasma actuators. Exp. Fluids 2008, 44, 795–806. [Google Scholar] [CrossRef]
- Grundmann, S.; Tropea, C. Experimental damping of boundary-layer oscillations using DBD plasma actuators. Int. J. Heat Fluid Flow 2009, 30, 394–402. [Google Scholar] [CrossRef]
- Feng, L.H.; Jukes, T.N.; Choi, K.S.; Wang, J.J. Flow control over a NACA 0012 airfoil using dielectric-barrier-discharge plasma actuator with a Gurney flap. Exp. Fluids 2012, 52, 1533–1546. [Google Scholar] [CrossRef] [Green Version]
- Joussot, R.; Hong, D.; Weber-Rozenbaum, R.; Leroy-Chesneau, A. Modification of the laminar-to-turbulent transition on a flat plate using a DBD plasma actuator. In Proceedings of the 5th Flow Control Conference, Chicago, IL, USA, 28 June–1 July 2010. [Google Scholar] [CrossRef]
- Kozlov, A.V.; Thomas, F.O. Active noise control of bluff-body flows using dielectric barrier discharge plasma actuators. In Proceedings of the 15th AIAA/CEAS Aeroacoustics Conference (30th AIAA Aeroacoustics Conference), Miami, FL, USA, 11–13 May 2009. [Google Scholar] [CrossRef] [Green Version]
- Thomas, F.O.; Corke, T.C.; Iqbal, M.; Kozlov, A.; Schatzman, D. Optimization of Dielectric Barrier Discharge Plasma Actuators for Active Aerodynamic Flow Control. AIAA J. 2012, 47, 2169–2178. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Wang, Z.; Chen, F.; Yan, G.; Wang, C. Large eddy simulation of the elliptic jets in film cooling controlled by dielectric barrier discharge plasma actuators with an improved model. J. Heat Transfer. 2018, 140, 122001. [Google Scholar] [CrossRef]
- Li, G.; Chen, F.; Li, L.; Song, Y. Large Eddy Simulation of the Effects of Plasma Actuation Strength on Film Cooling Efficiency. Plasma Sci. Technol. 2016, 18, 1101. [Google Scholar] [CrossRef]
- Uehara, S.; Takana, H. Surface cooling by dielectric barrier discharge plasma actuator in confinement channel. J. Electrostat. 2020, 104, 103417. [Google Scholar] [CrossRef]
- Rodrigues, F.; Abdollahzadeh, M.; Pascoa, J.; Pires, L. Influence of Exposed Electrode Thickness on Plasma Actuators Performance for Coupled Deicing and Flow Control Applications. In Proceedings of the ASME 2021 Fluids Engineering Division Summer Meeting, Virtual, 10–12 August 2021; Volume 3. [Google Scholar] [CrossRef]
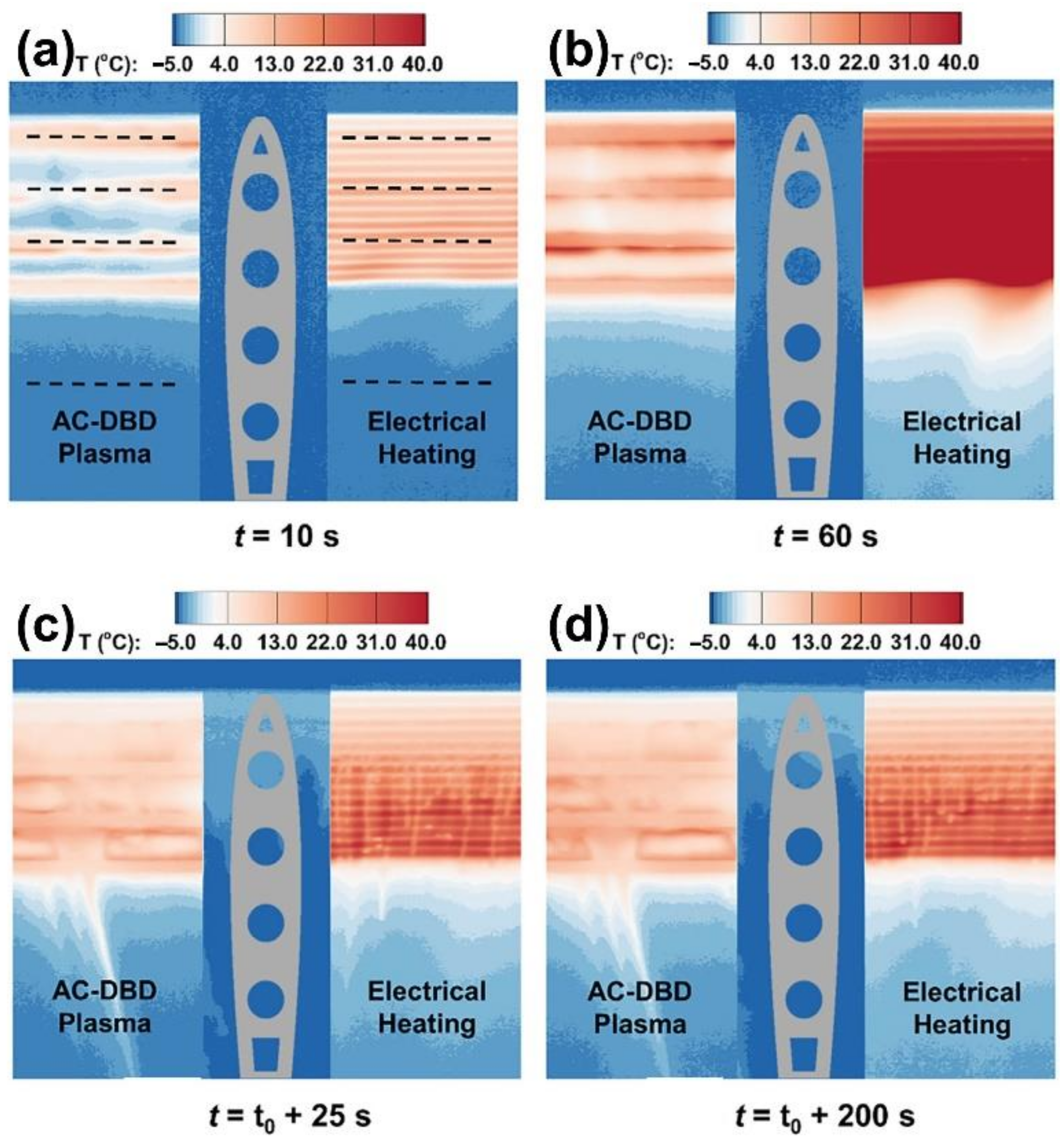
- Liu, Y.; Kolbakir, C.; Hu, H.; Hu, H. A comparison study on the thermal effects in DBD plasma actuation and electrical heating for aircraft icing mitigation. Int. J. Heat Mass Transf. 2018, 124, 319–330. [Google Scholar] [CrossRef]
- Kriegseis, J.; Möller, B.; Grundmann, S.; Tropea, C. On Performance and Efficiency of Dielectric Barrier Discharge Plasma Actuators for Flow Control Applications. Int. J. Flow Control. 2012, 4, 125–132. [Google Scholar] [CrossRef]
- Roth, J.R.; Dai, X.; Rahel, J.; Shermann, D.M. The physics and phenomenology of paraelectric One Atmosphere Uniform Glow Discharge Plasma (OAUGDPTM) actuators for aerodynamic flow control. In Proceedings of the 43rd AIAA Aerospace Sciences Meeting and Exhibit-Meeting Papers, Reno, NV, USA, 10–13 January 2005; pp. 14057–14068. [Google Scholar] [CrossRef]
- Roth, J.R.; Rahel, J.; Dai, X.; Sherman, D.M. The physics and phenomenology of One Atmosphere Uniform Glow Discharge Plasma (OAUGDPTM) reactors for surface treatment applications. J. Phys. D Appl. Phys. 2005, 38, 555. [Google Scholar] [CrossRef]
- Kraus, J. Electromagnetics, 4th ed.; McGraw-Hill Inc.: New York, NY, USA, 1991. [Google Scholar]
- Rodrigues, F.F.; Pascoa, J.C.; Trancossi, M. Analysis of Innovative Plasma Actuator Geometries for Boundary Layer Control. In Proceedings of the ASME 2016 International Mechanical Engineering Congress and Exposition, Phoenix, AZ, USA, 11–17 November 2016. [Google Scholar] [CrossRef]
- Enloe, C.L.; McLaughlin, T.E.; VanDyken, R.D.; Kachner, K.D.; Jumper, E.J.; Corke, T.C. Mechanisms and Responses of a Single Dielectric Barrier Plasma Actuator: Plasma Morphology. AIAA J. 2012, 42, 589–594. [Google Scholar] [CrossRef]
- Enloe, C.L.; McLaughlin, T.E.; VanDyken, R.D.; Kachner, K.D.; Jumper, E.J.; Corke, T.C.; Post, M.; Haddad, O. Mechanisms and Responses of a Dielectric Barrier Plasma Actuator: Geometric Effects. AIAA J. 2012, 42, 595–604. [Google Scholar] [CrossRef]
- Abdollahzadeh, M.; Páscoa, J.C.; Oliveira, P.J. Two-dimensional numerical modeling of interaction of micro-shock wave generated by nanosecond plasma actuators and transonic flow. J. Comput. Appl. Math. 2014, 270, 401–416. [Google Scholar] [CrossRef]
- Pons, J.; Moreau, E.; Touchard, G. Asymmetric surface dielectric barrier discharge in air at atmospheric pressure: Electrical properties and induced airflow characteristics. J. Phys. D Appl. Phys. 2005, 38, 3635. [Google Scholar] [CrossRef]
- Léger, L.; Moreau, E.; Touchard, G. Electrohydrodynamic airflow control along a flat plate by a DC surface corona discharge-Velocity profile and wall pressure measurements. In Proceedings of the 1st Flow Control Conference, St. Louis, MO, USA, 24–26 June 2002. [Google Scholar] [CrossRef]
- Rodrigues, F.F.; Pascoa, J.C.; Trancossi, M. Experimental Analysis of Alternative Dielectric Materials for DBD Plasma Actuators. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition. Proceedings (IMECE), Salt Lake City, UT, USA, 11–14 November 2019. [Google Scholar] [CrossRef]
- Dong, B.; Bauchire, J.M.; Pouvesle, J.M.; Magnier, P.; Hong, D. Experimental study of a DBD surface discharge for the active control of subsonic airflow. J. Phys. D Appl. Phys. 2008, 41, 155201. [Google Scholar] [CrossRef]
- Jukes, T.N.; Choi, K.S.; Segawa, T.; Yoshida, H. Jet flow induced by a surface plasma actuator. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2008, 222, 347–356. [Google Scholar] [CrossRef]
- Joussot, R.; Hong, D.; Rabat, H.; Boucinha, V.; Weber-Rozenbaum, R.; Leroy-Chesneau, A. Thermal characterization of a DBD plasma actuator: Dielectric temperature measurements using infrared thermography. In Proceedings of the 40th AIAA Fluid Dynamics Conference, Chicago, IL, USA, 28 June–1 July 2010. [Google Scholar] [CrossRef]
- Stanfield, S.A.; Menart, J.; DeJoseph, C.; Kimmel, R.L.; Hayes, J.R. Rotational and Vibrational Temperature Distributions for a Dielectric Barrier Discharge in Air. AIAA J. 2012, 47, 1107–1115. [Google Scholar] [CrossRef]
- Tirumala, R.; Benard, N.; Moreau, E.; Fenot, M.; Lalizel, G.; Dorignac, E. Temperature characterization of dielectric barrier discharge actuators: Influence of electrical and geometric parameters. J. Phys. D Appl. Phys. 2014, 47, 255203. [Google Scholar] [CrossRef]
- Rodrigues, F.F.; Pascoa, J.C.; Trancossi, M. Experimental Thermal Characterization of DBD Plasma Actuators. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition. Proceedings (IMECE), Pittsburgh, PA, USA, 9–15 November 2018. [Google Scholar] [CrossRef]
- Rodrigues, F.F.; Pascoa, J.C.; Trancossi, M. Experimental Analysis of Dielectric Barrier Discharge Plasma Actuators Thermal Characteristics under External Flow Influence. J. Heat Transfer. 2018, 140, 102801. [Google Scholar] [CrossRef]
- Abbasi, A.A.; Li, H.; Weiwei, H.; Meng, X. Thermal characteristics of plasma actuators in turbulent boundary layer. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual Event, 15–19 June 2020. [Google Scholar] [CrossRef]
- Kaneko, Y.; Nishida, H.; Tagawa, Y. Visualization of the Electrohydrodynamic and Thermal Effects of AC-DBD Plasma Actuators of Plate- and Wire-Exposed Electrodes. Actuators 2022, 11, 38. [Google Scholar] [CrossRef]
- Aberoumand, S.; Jafarimoghaddam, A.; Aberoumand, H. Numerical Investigation on the Impact of DBD Plasma Actuators on Temperature Enhancement in the Channel Flow. Heat Transfer—Asian Res. 2017, 46, 497–510. [Google Scholar] [CrossRef]
- Benmoussa, A.; Belasri, A.; Harrache, Z. Numerical investigation of gas heating effect in dielectric barrier discharge for Ne-Xe excilamp. Curr. Appl. Phys. 2017, 17, 479–483. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, Y.; Yang, C. Recent developments in thermal characteristics of surface dielectric barrier discharge plasma actuators driven by sinusoidal high-voltage power. Chin. J. Aeronaut. 2022, 36, 1–21. [Google Scholar] [CrossRef]
- Preventing the Dangerous Formation of Ice on Aircraft|PHOBIC2ICE Project|Results in Brief|H2020|CORDIS|European Commission. Available online: https://cordis.europa.eu/article/id/386841-preventing-the-dangerous-formation-of-ice-on-aircraft (accessed on 6 November 2022).
- Volpe, A.; Gaudiuso, C.; Ancona, A. Laser Fabrication of Anti-Icing Surfaces: A Review. Materials 2020, 13, 5692. [Google Scholar] [CrossRef]
- Alsabagh, A.S.Y.; Tiu, W.; Xu, Y.; Virk, M.S. A Review of the Effects of Ice Accretion on the Structural Behavior of Wind Turbines. Wind. Eng. 2013, 37, 59–70. [Google Scholar] [CrossRef]
- Liu, Y.; Kolbakir, C.; Hu, H.; Hu, H. A comparison study on AC-DBD plasma and electrical heating for aircraft icing mitigation. In Proceedings of the AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef] [Green Version]
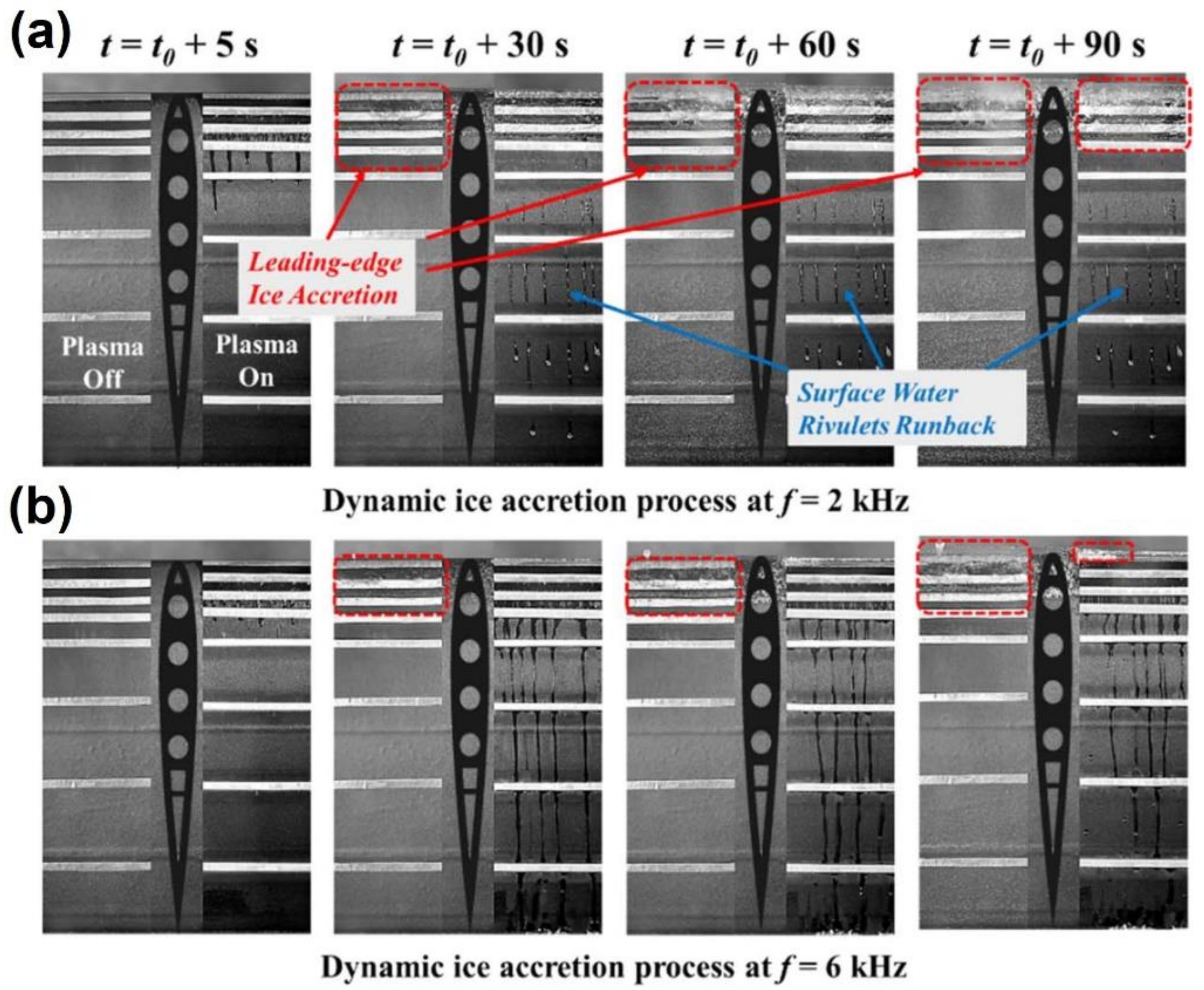
- Chen, J.; Liang, H.; Wu, Y.; Wei, B.; Zhao, G.; Tian, M.; Xie, L. Experimental Study on Anti-Icing Performance of NS-DBD Plasma Actuator. Appl. Sci. 2018, 8, 1889. [Google Scholar] [CrossRef] [Green Version]
- Little, J.; Takashima, K.; Nishihara, M.; Adamovich, I.; Samimy, M. Separation Control with Nanosecond-Pulse-Driven Dielectric Barrier Discharge Plasma Actuators. AIAA J. 2012, 50, 350–365. [Google Scholar] [CrossRef]
- Kolbakir, C.; Hu, H.; Liu, Y.; Hu, H. A hybrid anti-/de-icing strategy by combining ns-dbd plasma actuator and superhydrophobic coating for aircraft icing mitigation. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Waldman, R.M.; Li, H.; Guo, H.; Li, L.; Hu, H. An experimental investigation on the effects of surface wettability on water runback and ice accretion over an airfoil surface. In Proceedings of the 8th AIAA Atmospheric and Space Environments Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar] [CrossRef] [Green Version]
- Zheng, X.; Song, H.; Bian, D.; Liang, H.; Zong, H.; Huang, Z.; Wang, Y.; Xu, W. A hybrid plasma de-icing actuator by using SiC hydrophobic coating-based quartz glass as barrier dielectric. J. Phys. D Appl. Phys. 2021, 54, 375202. [Google Scholar] [CrossRef]
- Liu, Y.; Kolbakir, C.; Starikovskiy, A.Y.; Miles, R.; Hu, H. An experimental study on the thermal characteristics of NS-DBD plasma actuation and application for aircraft icing mitigation. Plasma Sources Sci. Technol. 2019, 28, 014001. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Kolbakir, C.; Hu, H.; Meng, X.; Hu, H. An experimental study on the thermal effects of duty-cycled plasma actuation pertinent to aircraft icing mitigation. Int. J. Heat Mass Transf. 2019, 136, 864–876. [Google Scholar] [CrossRef]
- Wei, B.; Wu, Y.; Liang, H.; Chen, J.; Zhao, G.; Tian, M.; Xu, H. Performance and mechanism analysis of nanosecond pulsed surface dielectric barrier discharge based plasma deicer. Phys. Fluids 2019, 31, 091701. [Google Scholar] [CrossRef]
- Fang, X.; Su, Z.; Song, H.; Liang, H.; Xie, L.; Liu, X. Parametric Investigation of High-voltage Plasma Discharge for Aircraft Icing Mitigation. In Proceedings of the 2021 IEEE 2nd China International Youth Conference on Electrical Engineering, CIYCEE 2021, Chengdu, China, 15–17 December 2021. [Google Scholar] [CrossRef]
- Su, Z.; Liang, H.; Zong, H.; Li, J.; Fang, X.; Wei, B.; Chen, J.; Kong, W. Geometrical and electrical optimization of NS-SDBD streamwise plasma heat knife for aircraft anti-icing. Chin. J. Aeronaut. 2022; in press. [Google Scholar] [CrossRef]
- Meng, X.; Hu, H.; Li, C.; Abbasi, A.A.; Cai, J.; Hu, H. Mechanism study of coupled aerodynamic and thermal effects using plasma actuation for anti-icing. Phys. Fluids 2019, 31, 037103. [Google Scholar] [CrossRef] [Green Version]
- Kolbakir, C.; Hu, H.; Liu, Y.; Hu, H. An experimental study on different plasma actuator layouts for aircraft icing mitigation. Aerosp. Sci. Technol. 2020, 107, 106325. [Google Scholar] [CrossRef]
- Lindner, M.; Pipa, A.V.; Karpen, N.; Hink, R.; Berndt, D.; Foest, R.; Bonaccurso, E.; Weichwald, R.; Friedberger, A.; Caspari, R.; et al. Icing Mitigation by MEMS-Fabricated Surface Dielectric Barrier Discharge. Appl. Sci. 2021, 11, 11106. [Google Scholar] [CrossRef]
- Jia, Y.; Liang, H.; Zong, H.; Wei, B.; Xie, L.; Hua, W.; Li, Z. Ice shape modulation with nanosecond pulsed surface dielectric barrier discharge plasma actuator towards flight safety. Aerosp. Sci. Technol. 2022, 120, 107233. [Google Scholar] [CrossRef]
- Gao, T.X.; Luo, Z.B.; Zhou, Y.; Yang, S.K. A novel de-icing strategy combining electric-heating with plasma synthetic jet actuator. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 235, 513–522. [Google Scholar] [CrossRef]
- Hu, H.; Meng, X.; Cai, J.; Zhou, W.; Liu, Y.; Hu, H. Optimization of Dielectric Barrier Discharge Plasma Actuators for Icing Control. J. Aircraft 2020, 57, 383–387. [Google Scholar] [CrossRef]
- Tanaka, T.; Matsuda, H.; Takahashi, T.; Chiba, T.; Watanabe, N.; Sato, H.; Takeyama, M. Experimental Study on the Snow-fall Flow Control of Backward-Facing Steps Using a High-Durability Designed Plasma Electrode. Actuators 2022, 11, 313. [Google Scholar] [CrossRef]
- Lilley, A.J.; Roy, S.; Michels, L.; Roy, S. Performance recovery of plasma actuators in wet conditions. J. Phys. D Appl. Phys. 2022, 55, 155201. [Google Scholar] [CrossRef]
- Abdollahzadehsangroudi, M.; Pascoa, J.; Rodrigues, F. System for Ice Detection/Prevention and Flow Control Based on the Impression of Sliding Plasma Actuators with Dielectric Discharge Barrier. U.S. Patent WO2018060830A1, 25 September 2017. [Google Scholar]
- Rodrigues, F.F.; Abdollahzadeh, M.; Pascoa, J. Dielectric Barrier Discharge Plasma Actuators for Active Flow Control, Ice Formation Detection and Ice Accumulation Prevention. In Proceedings of the ASME 2020 Fluids Engineering Division Summer Meeting collocated with the ASME 2020 Heat Transfer Summer Conference and the ASME 2020 18th International Conference on Nanochannels, Microchannels, and Minichannels, Virtual, 13–15 June 2020; Volume 2. [Google Scholar] [CrossRef]
- Xie, L.; Liang, H.; Zong, H.; Liu, X.; Li, Y. Multipurpose distributed dielectric-barrier-discharge plasma actuation: Icing sensing, anti-icing, and flow control in one. Phys. Fluids 2022, 34, 071701. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drawbacks of Various Conventional Ice Sensing Techniques | |
|---|---|
| Ultrasonic damping | Lack of practical application experience; feasibility under practical conditions not proven. |
| Piezoelectric sensor | Degradation of aerodynamic performance of blade surface, associated with significant measurement error. |
| Resonance frequency measurement | Associated with large measurement error that does not allow accurate determination of ice accumulation. In addition, ice accumulation detection is affected by the shape of the surface and the velocity of the object to which it is applied. |
| Vibration diaphragm | Lack of practical application. |
| Electrical change | Allows only monitoring of icing conditions in the vicinity of the instrument. Monitoring instruments can affect the aerodynamic performance of the rotor blades. |
| Temperature change | Unable to detect ice formation on the surface of the blades in a timely manner. |
| Optical measurement technology | Significant deviation between the calculation result and the actual situation, the observation period is limited, the ice accumulation may change the position and shape of the projection aperture, and it is difficult to use during the day. In addition, the installation of the light source may affect the aerodynamic performance of the surface. |
| Parameters That Influence the Plasma Actuator Performance | |
|---|---|
| Input signal characteristics | ➢ Voltage amplitude (1–80 kVpp) [103,104] |
| ➢ Frequency (1–60 kHz) [105,106] | |
| ➢ Waveform type (sinusoidal, quadratic, or triangular) [107] | |
| Geometrical parameters | ➢ Exposed electrode width (1–10 mm) [92,108] |
| ➢ Embedded electrode width (8–20 mm) [109,110] | |
| ➢ Gap between the electrodes (0–3 mm) [109] | |
| ➢ Dielectric thickness (0.3–4 mm) [110,111] | |
| Dielectric materials | ➢ Kapton [112] |
| ➢ Teflon [109] | |
| ➢ PMMA [110] | |
| ➢ PIB rubber [111] | |
| ➢ Macor [113] | |
| ➢ Cirlex [92] ➢ PVDF [114] | |
| Actuator configuration | ➢ Single DBD Plasma actuator [115] |
| ➢ Micro DBD Plasma actuator [108] | |
| ➢ Nano second pulsed plasma actuator [116] | |
| ➢ Multiple encapsulated electrode actuator [112] | |
| ➢ Sliding DBD plasma actuator [110] | |
| ➢ Stair-shaped DBD plasma actuator [117] | |
| ➢ Segmented electrode plasma actuator [118] | |
| ➢ Plasma heat knife actuator [119] | |
| ➢ Plasma synthetic jet actuator (linear or annular) [120,121] | |
| ➢ Curved plasma actuators (horseshoe or serpentine) [122,123] | |
| DBD Plasma Actuators’ Applications | |
|---|---|
| Active Flow Control Field | ➢ Flow separation control [132,133,134] |
| ➢ Wake control [135] | |
| ➢ Aircraft noise reduction [136,137] | |
| ➢ Modification of velocity fluctuations [138,139,140] | |
| ➢ Drag reduction [94] | |
| ➢ Lift coefficient enhancement [103,141] | |
| ➢ Flow boundary layer modification [142] | |
| ➢ Turbulence reduction [143,144] | |
| Heat Transfer Field | ➢ Film cooling efficiency enhancement [145,146] |
| ➢ Surface cooling [147] | |
| ➢ Deicing and anti-icing [28,148,149] | |
| ➢ Ice sensing [30,111] | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodrigues, F.; Abdollahzadehsangroudi, M.; Nunes-Pereira, J.; Páscoa, J. Recent Developments on Dielectric Barrier Discharge (DBD) Plasma Actuators for Icing Mitigation. Actuators 2023, 12, 5. https://doi.org/10.3390/act12010005
Rodrigues F, Abdollahzadehsangroudi M, Nunes-Pereira J, Páscoa J. Recent Developments on Dielectric Barrier Discharge (DBD) Plasma Actuators for Icing Mitigation. Actuators. 2023; 12(1):5. https://doi.org/10.3390/act12010005
Chicago/Turabian StyleRodrigues, Frederico, Mohammadmahdi Abdollahzadehsangroudi, João Nunes-Pereira, and José Páscoa. 2023. "Recent Developments on Dielectric Barrier Discharge (DBD) Plasma Actuators for Icing Mitigation" Actuators 12, no. 1: 5. https://doi.org/10.3390/act12010005