
Design, Modeling, Testing, and Control of a Novel Fully Flexure-Based Displacement Reduction Mechanism Driven by Voice Coil Motor

Abstract
:1. Introduction
2. Design of Displacement Reduction Mechanism
3. Analytical Model
4. FEA and Experimental Verification
4.1. FEA Verification
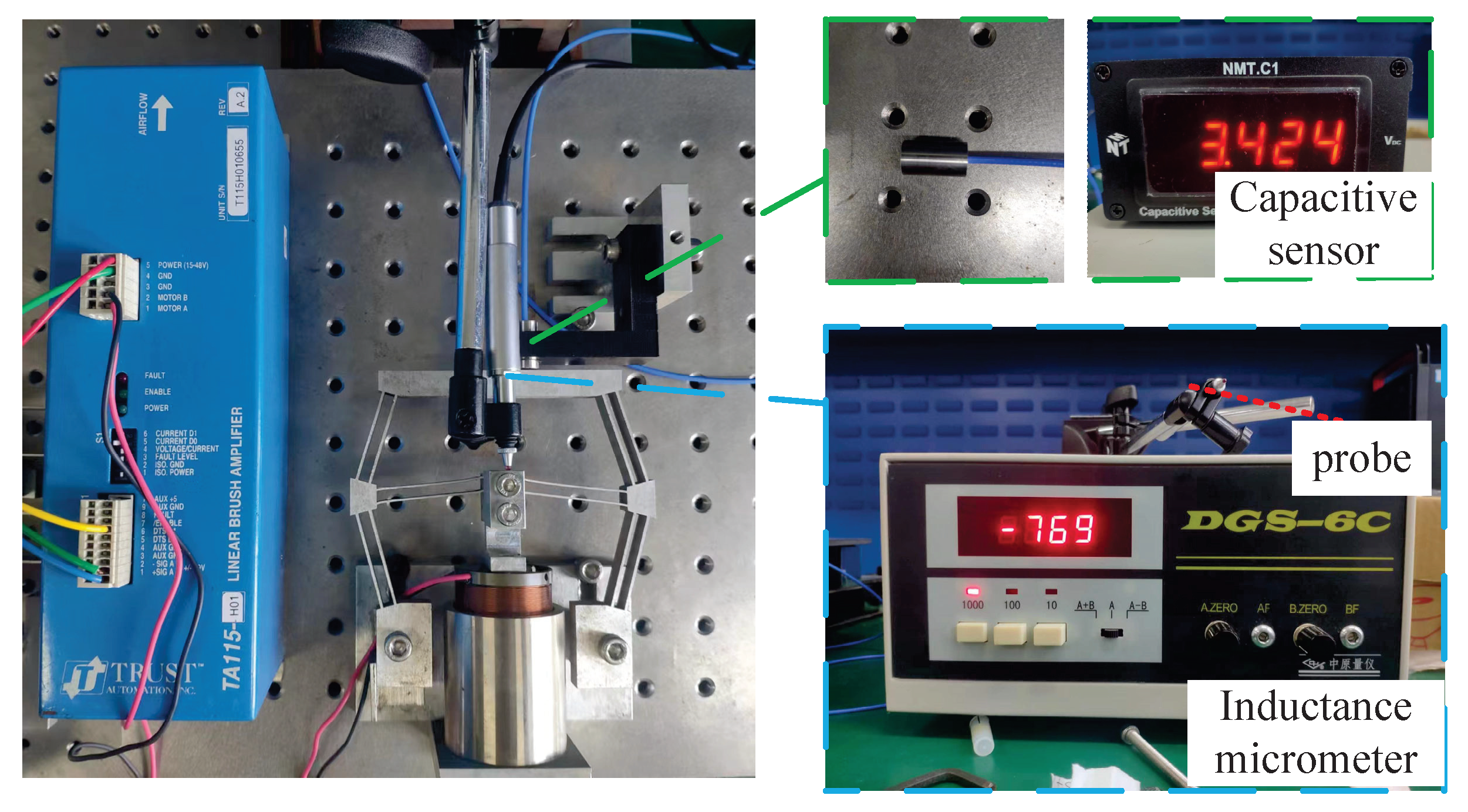
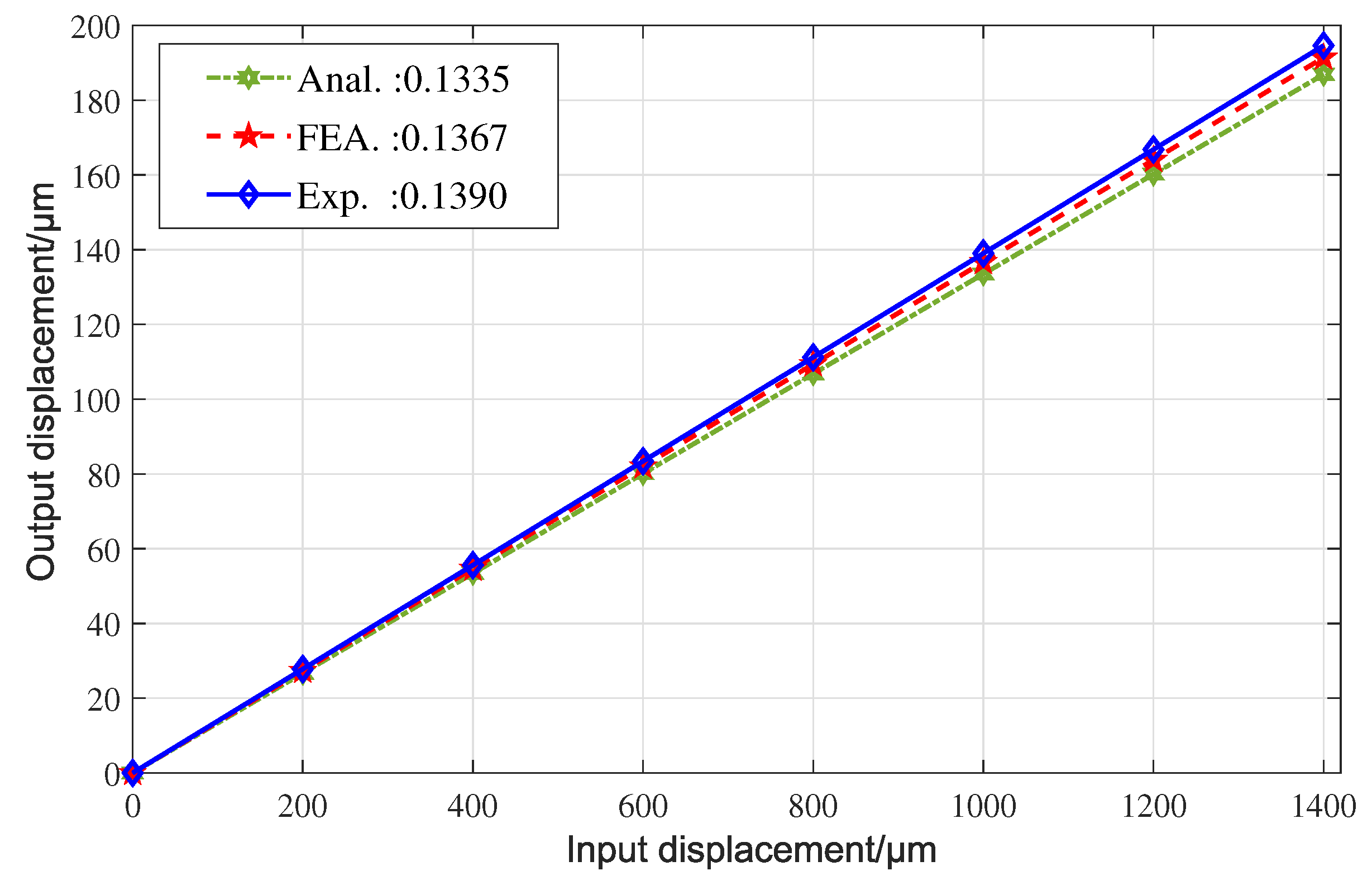
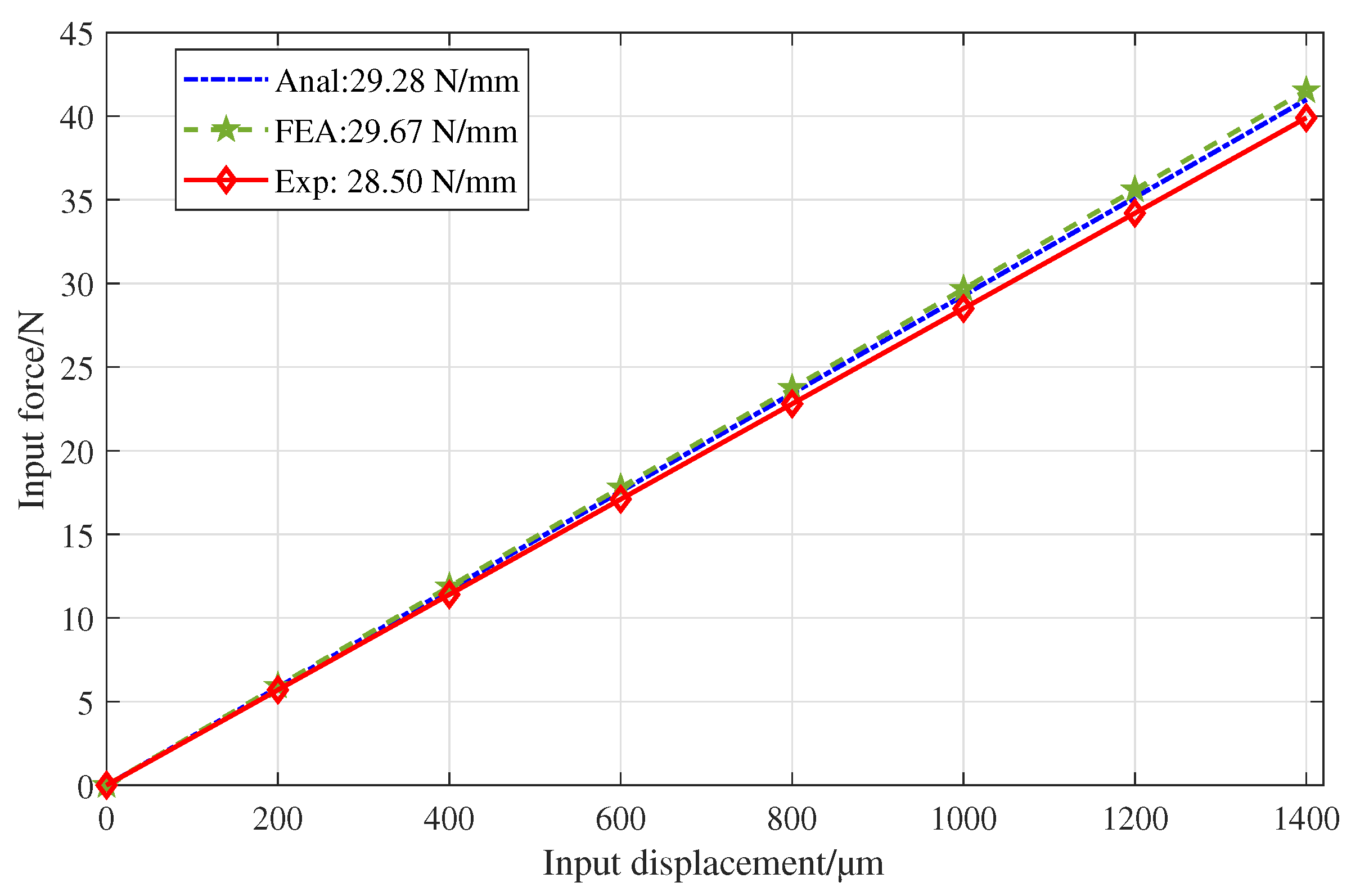
4.2. Performance Testing
5. Controller Design
5.1. Dynamic Model Identification
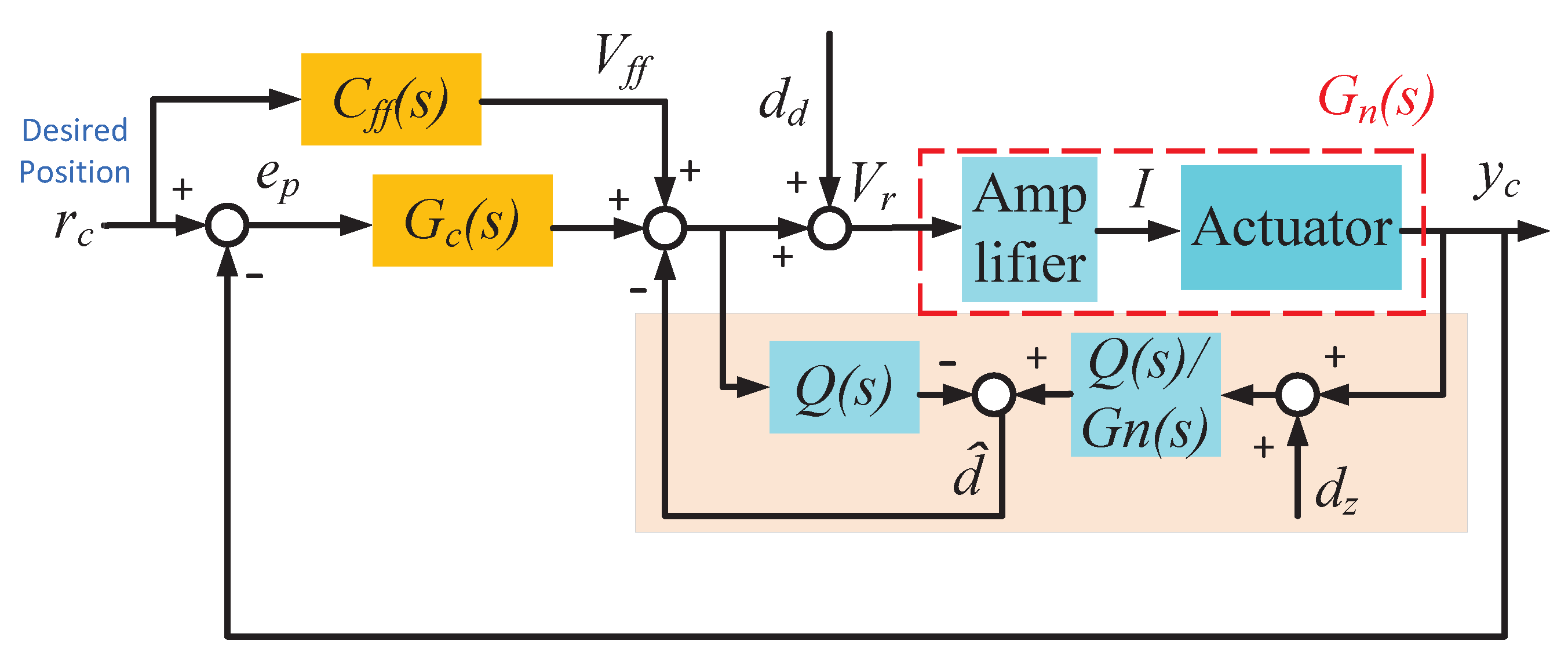
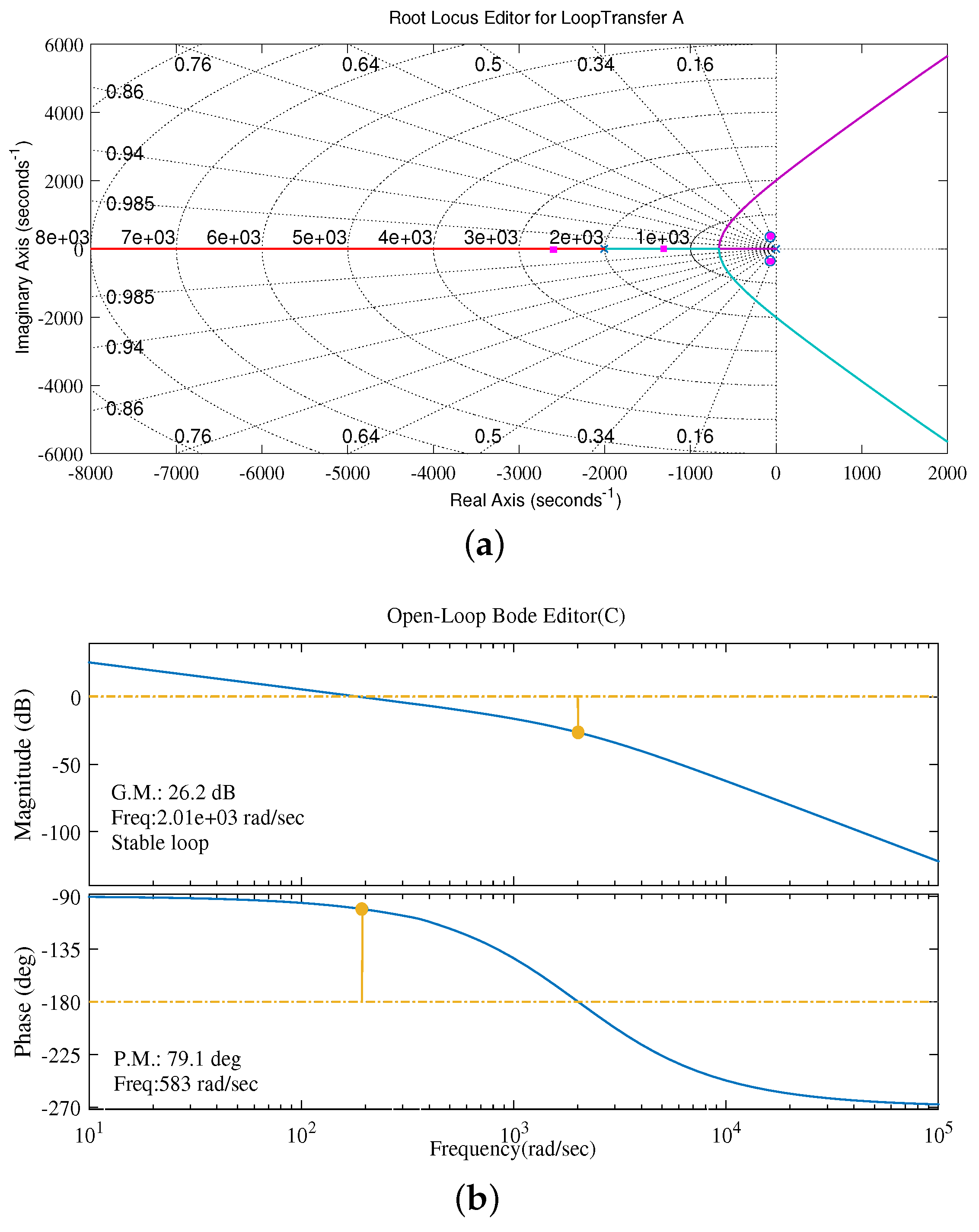
5.2. Design Process of Controller
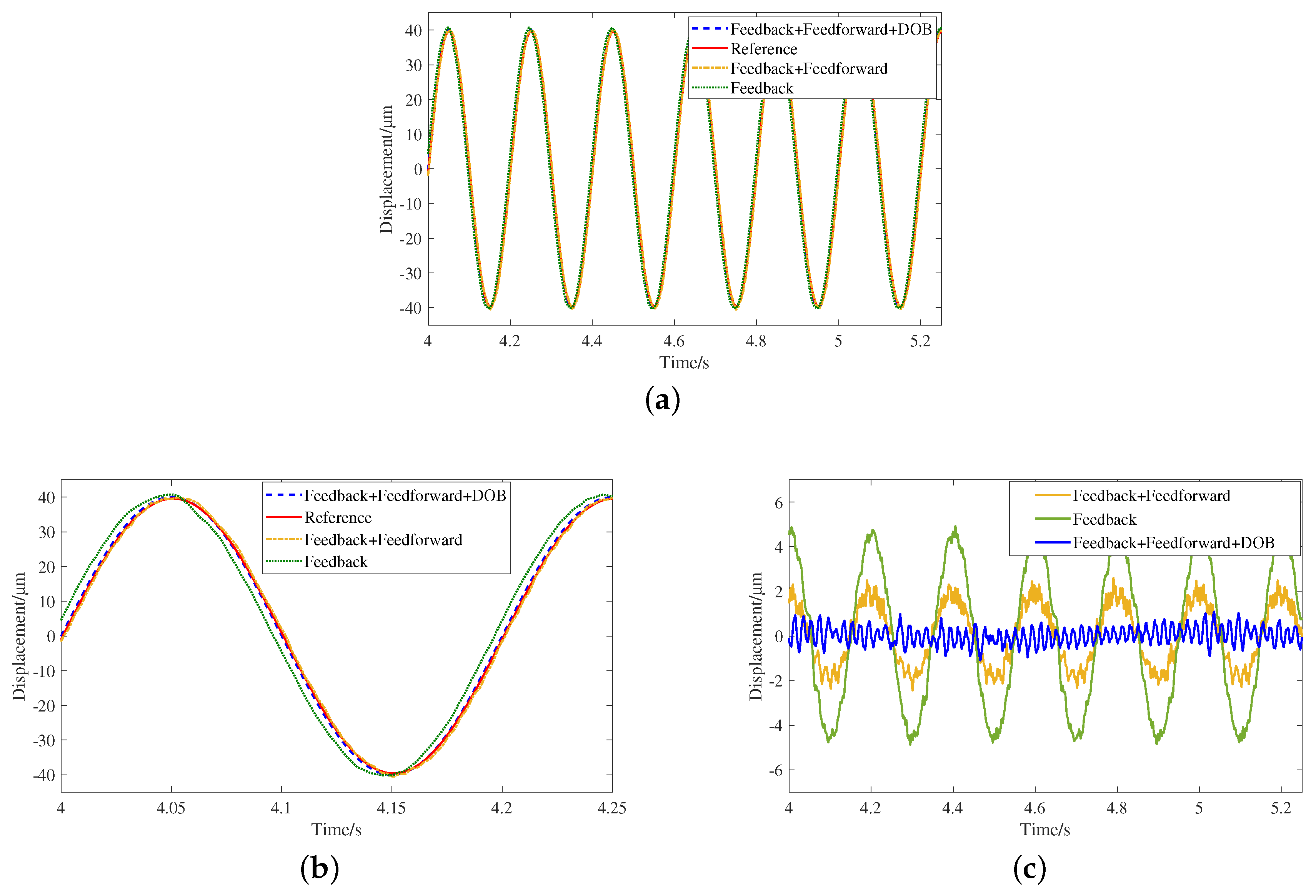
5.3. Disturbance Rejection
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, C.; Lee, J.W.; Ryu, S.G.; Oh, J.H. Optimum design of a large area, flexure based XYθ mask alignment stage for a 12-inch wafer using grey relation analysis. Robot. Comput. Integr. Manuf. 2019, 58, 109–119. [Google Scholar] [CrossRef]
- Zhu, W.L.; Yang, X.; Duan, F.; Zhu, Z.; Ju, B.F. Design and adaptive terminal sliding mode control of a fast tool servo system for diamond machining of freeform surfaces. IEEE Trans. Ind. Electron. 2017, 66, 4912–4922. [Google Scholar] [CrossRef]
- Xiao, R.; Xu, M.; Shao, S.; Tian, Z. Design and wide-bandwidth control of large aperture fast steering mirror with integrated-sensing unit. Mech. Syst. Signal Process. 2019, 126, 211–226. [Google Scholar] [CrossRef]
- Guo, D.; Nagel, W.S.; Clayton, G.M.; Leang, K.K. Spatial-temporal trajectory redesign for dual-stage nanopositioning systems with application in AFM. IEEE/ASME Trans. Mechatron. 2020, 25, 558–569. [Google Scholar] [CrossRef]
- Yang, C.; Li, C.; Zhao, J. A nonlinear charge controller with tunable precision for highly linear operation of piezoelectric stack actuators. IEEE Trans. Ind. Electron. 2017, 64, 8618–8625. [Google Scholar] [CrossRef]
- Tian, Y.; Cai, K.; Zhang, D.; Liu, X.; Wang, F.; Shirinzadeh, B. Development of a XYZ scanner for home-made atomic force microscope based on FPAA control. Mech. Syst. Signal Process. 2019, 131, 222–242. [Google Scholar] [CrossRef]
- Csencsics, E.; Schitter, G. Exploring the pareto fronts of actuation technologies for high performance mechatronic systems. IEEE/ASME Trans. Mechatron. 2020, 26, 1053–1063. [Google Scholar] [CrossRef]
- Rakuff, S.; Cuttino, J.F. Design and testing of a long-range, precision fast tool servo system for diamond turning. Precis. Eng. 2009, 33, 18–25. [Google Scholar] [CrossRef]
- Ito, S.; Troppmair, S.; Lindner, B.; Cigarini, F.; Schitter, G. Long-range fast nanopositioner using nonlinearities of hybrid reluctance actuator for energy efficiency. IEEE Trans. Ind. Electron. 2018, 66, 3051–3059. [Google Scholar] [CrossRef]
- Sun, L.; Chen, F.; Dong, W. A pzt actuated 6-dof positioning system for space optics alignment. Flight Control Detect. 2019, 2, 1–13. [Google Scholar]
- Gutierrez, H.M.; Ro, P.I. Magnetic servo levitation by sliding-mode control of nonaffine systems with algebraic input invertibility. IEEE Trans. Ind. Electron. 2005, 52, 1449–1455. [Google Scholar] [CrossRef]
- Awtar, S.; Parmar, G. Design of a large range XY nanopositioning system. J. Mech. Robot. 2013, 5, 021008. [Google Scholar] [CrossRef] [Green Version]
- Hao, G.; Kong, X. A Novel Large-Range XY Compliant Parallel Manipulator With Enhanced Out-of-Plane Stiffness. J. Mech. Des. 2012, 134, 061009. [Google Scholar] [CrossRef]
- Roy, N.K.; Cullinan, M.A. Design and characterization of a two-axis, flexure-based nanopositioning stage with 50 mm travel and reduced higher order modes. Precis. Eng. 2018, 53, 236–247. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, Q.; Gao, Y.; Dong, W. A review on the flexure-based displacement amplification mechanisms. IEEE Access 2020, 8, 205919–205937. [Google Scholar] [CrossRef]
- Kim, J.H.; Kim, S.H.; Kwak, Y.K. Development and optimization of 3-D bridge-type hinge mechanisms. Sens. Actuators A Phys. 2004, 116, 530–538. [Google Scholar] [CrossRef]
- Liang, C.; Wang, F.; Huo, Z.; Shi, B.; Tian, Y.; Zhao, X.; Zhang, D. A 2-DOF monolithic compliant rotation platform driven by piezoelectric actuators. IEEE Trans. Ind. Electron. 2019, 67, 6963–6974. [Google Scholar] [CrossRef]
- Wu, H.; Lai, L.; Zhang, L.; Zhu, L. A novel compliant XY micropositioning stage using bridge-type displacement amplifier embedded with Scott-Russell mechanism. Precis. Eng. 2022, 73, 284–295. [Google Scholar] [CrossRef]
- Choi, K.B.; Lee, J.J.; Hata, S. A piezo-driven compliant stage with double mechanical amplification mechanisms arranged in parallel. Sens. Actuators A Phys. 2010, 161, 173–181. [Google Scholar] [CrossRef]
- Lai, L.J.; Zhu, Z.N. Design, modeling and testing of a novel flexure-based displacement amplification mechanism. Sens. Actuators A Phys. 2017, 266, 122–129. [Google Scholar] [CrossRef]
- Yong, Y.K.; Aphale, S.S.; Moheimani, S.R. Design, identification, and control of a flexure-based XY stage for fast nanoscale positioning. IEEE Trans. Nanotechnol. 2008, 8, 46–54. [Google Scholar] [CrossRef]
- Ling, M.; Cao, J.; Jiang, Z.; Lin, J. Theoretical modeling of attenuated displacement amplification for multistage compliant mechanism and its application. Sens. Actuators A Phys. 2016, 249, 15–22. [Google Scholar] [CrossRef]
- Szafran, J.; Juszczyk, K.; Kamiński, M. Experiment-based reliability analysis of structural joints in a steel lattice tower. J. Constr. Steel Res. 2019, 154, 278–292. [Google Scholar] [CrossRef]
- Valdebenito, M.; Jensen, H.; Schuëller, G.; Caro, F. Reliability sensitivity estimation of linear systems under stochastic excitation. Comput. Struct. 2012, 92, 257–268. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Extended-state-observer-based adaptive control of electrohydraulic servomechanisms without velocity measurement. IEEE/ASME Trans. Mechatron. 2019, 25, 1151–1161. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Wang, Y.; Yang, X.; Chen, J. Output feedback backstepping control of hydraulic actuators with valve dynamics compensation. Mech. Syst. Signal Process. 2021, 158, 107769. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, M.; Jin, Q.; Liu, Y. Design of DOB-based control system in the presence of uncertain delays for low-order processes. IEEE Trans. Control Syst. Technol. 2018, 28, 558–565. [Google Scholar] [CrossRef]
- Chen, M.; Shao, S.Y.; Jiang, B. Adaptive neural control of uncertain nonlinear systems using disturbance observer. IEEE Trans. Cybern. 2017, 47, 3110–3123. [Google Scholar] [CrossRef] [PubMed]
- Gao, G.; Ye, M.; Zhang, M. Synchronous robust sliding mode control of a parallel robot for automobile electro-coating conveying. IEEE Access 2019, 7, 85838–85847. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 40 mm | 10 mm | 0.8 mm | 15 | 4.8 mm |
| 35 mm | 10 mm | 1 mm | 15 | 5 mm |
| Mode | Nature Frequencies (Hz) |
|---|---|
| 1 | 152.87 |
| 2 | 276.58 |
| 3 | 310.64 |
| 4 | 571.69 |
| Specifications | Anal. | FEA | Experiment | Error1 (%) | Error2 (%) |
|---|---|---|---|---|---|
| 0.1335 | 0.1367 | 0.1390 | 3.96 | 1.65 | |
| (N/mm) | 29.28 | 29.67 | 28.50 | 2.74 | 4.11 |
| (Hz) | 319.62 | 310.64 | 291 | 9.84 | 6.75 |
| Method | MTE (μm) | RMSTE (μm) |
|---|---|---|
| Feedback | ±4.98 | 10.50 |
| Feedback + Feedforward | ±2.60 | 1.88 |
| Feedback + Feedforward + DOB | ±1.40 | 0.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Lai, L. Design, Modeling, Testing, and Control of a Novel Fully Flexure-Based Displacement Reduction Mechanism Driven by Voice Coil Motor. Actuators 2022, 11, 228. https://doi.org/10.3390/act11080228
Chen Y, Lai L. Design, Modeling, Testing, and Control of a Novel Fully Flexure-Based Displacement Reduction Mechanism Driven by Voice Coil Motor. Actuators. 2022; 11(8):228. https://doi.org/10.3390/act11080228
Chicago/Turabian StyleChen, Yunzhuang, and Leijie Lai. 2022. "Design, Modeling, Testing, and Control of a Novel Fully Flexure-Based Displacement Reduction Mechanism Driven by Voice Coil Motor" Actuators 11, no. 8: 228. https://doi.org/10.3390/act11080228