
Research on Lightweight Method of Segment Beam Point Cloud Based on Edge Detection Optimization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Lightweight Point Cloud Basic Algorithm Comparison
2.1. Algorithm Introduction
- (1)
- Voxel grid downsampling method
- (2)
- The farthest downsampling method
- The input point cloud has N points, and select a point P0 from the point cloud as the starting point to obtain;
- The collection of sampling points S = {P0};
- Calculate the distance from P0 to form the N dimension array L, from which the point corresponding to the maximum value as P1 is selected, and update the collection of sampling points S = {P0, P1};
- Calculate the distance of all points to P1; for each point Pi, if the distance to P1 is less than Li, update Li = d (Pi, P1); therefore, the array Li stored is always the closest distance from each point to the sampling point collection S;
- The point corresponding to the maximum value in L is selected as P2, and the sampling point set S = {P0, P1, P2} is updated;
- Repeat 2–4 steps and sampling until the N’ target sampling point.
- (3)
- The curvature downsampling method
- Calculate the neighborhood of each point K in the original point cloud, and then calculate the normal angle value of the point to the point neighborhood. The larger the curvature, the greater the angle value; the step can improve the calculation efficiency;
- The collection of two regional points was established, namely region A with obvious features and region B with no obvious features;
- Set an angle threshold; when the neighborhood angle value of a point is greater than the threshold value, determine the point to belong to the obvious feature region; otherwise, it is regarded as an obvious region;
- Set the target sampling number to be S and the sampling uniformity to be U. The feature obvious and unobvious regions were sampled as S × (1 − U) and S × U, respectively.
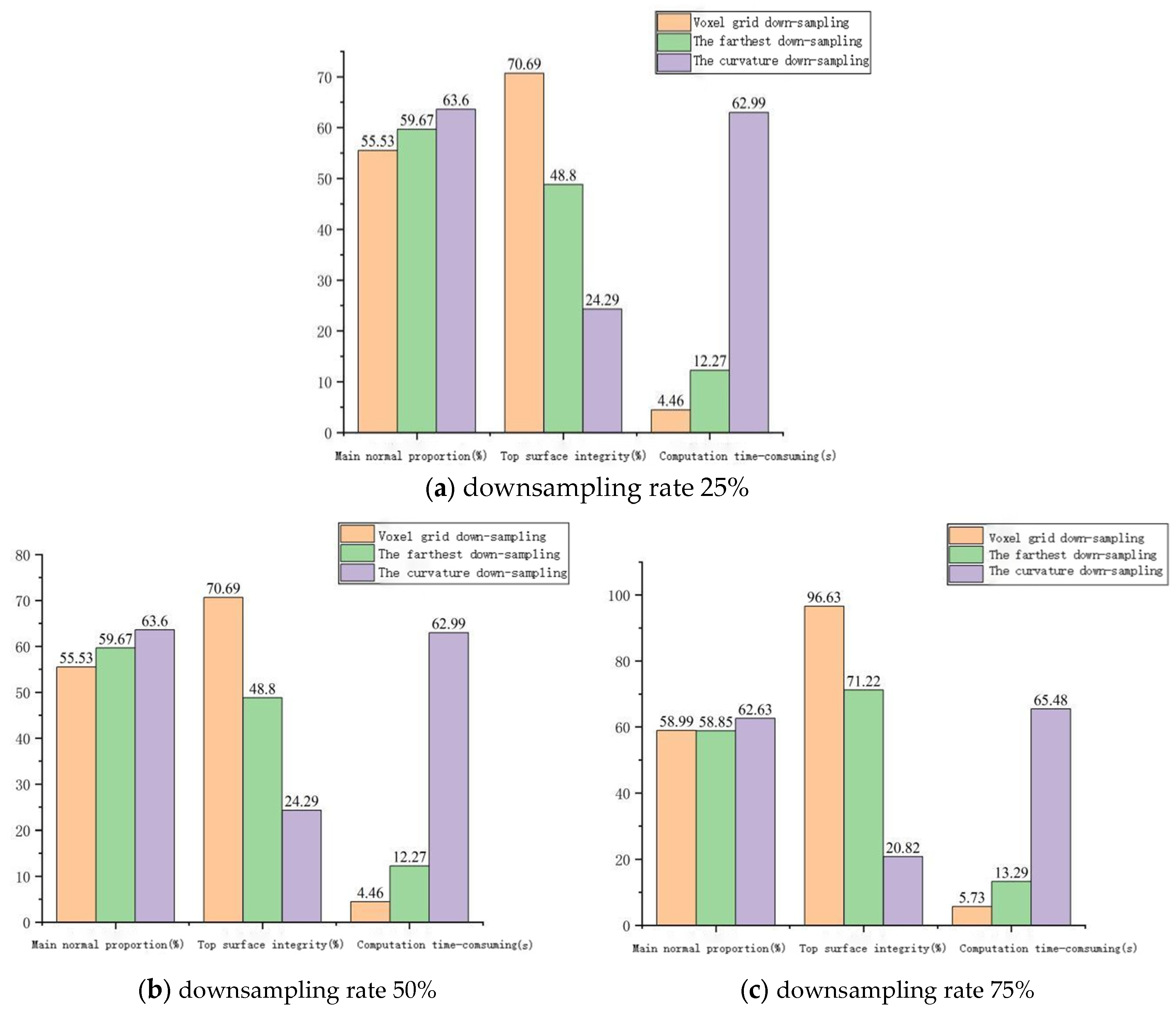
2.2. Algorithm Comparison and Selection
3. Voxel Grid Method Based on Edge Detection Optimization
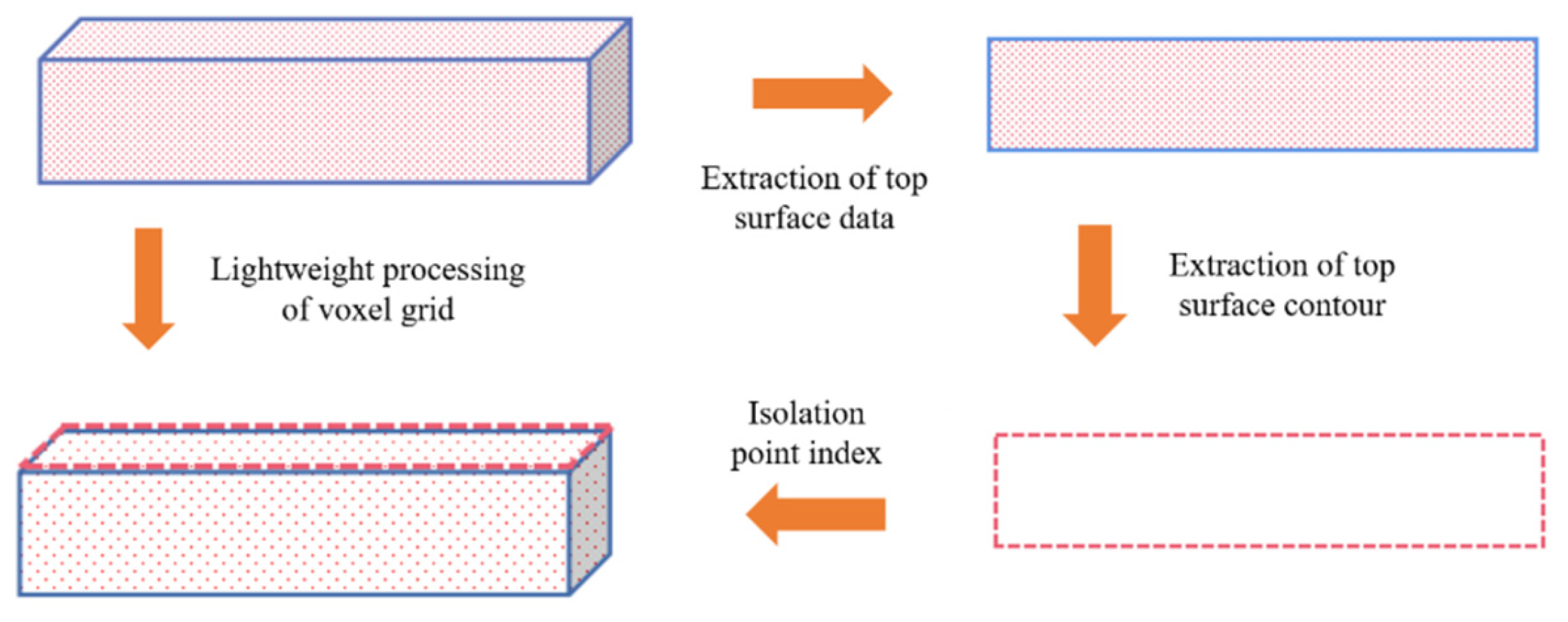
3.1. Algorithm Optimization Ideas
- (1)
- Firstly, segment the point cloud top surface data of the segment beam to be processed and set it as the indicator monitoring plane;
- (2)
- Extract the contour edges of the top point cloud, set them as isolation points, and create indexes;
- (3)
- Use the voxel grid method for lightweight point cloud processing to reduce the amount of point cloud data. Among them, when the voxel grid contains isolation points, they are removed by index to avoid the contour edge points being replaced by adjacent centroid points.
3.2. Edge Detection Method
4. Example Verification of Optimization Algorithm
5. Conclusions
- (1)
- The results show that the voxel grid method has the best performance compared with the farthest downsampling method and the curvature downsampling method in terms of top surface data retention and calculation time.
- (2)
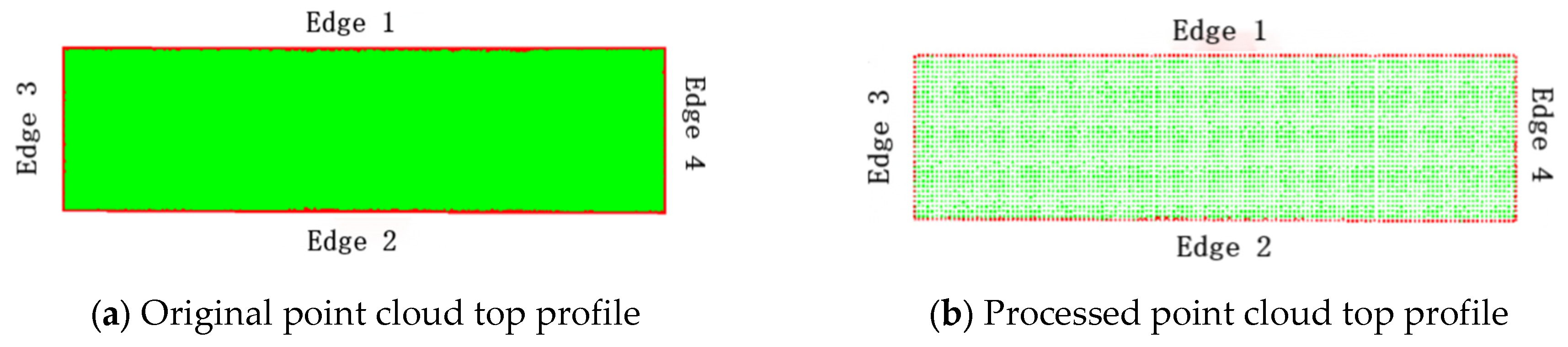
- Zou B et al. verified with the FWD method that the traditional sampling process had the problem of large deviation in the contours of the point cloud top surface obtained by processing [23]. In this paper, the edge optimization of the voxel grid method is used to reduce the deviation significantly, the overall deviation is less than 5 mm, and the edge of the point cloud is well-preserved.
- (3)
- The edge-optimized voxel grid method reduces the average offset of the point cloud contour from 2.235 mm to 0.664 mm, and the edge offset of the point cloud is relatively stable, improving the geometric contour retention of the point cloud after lightening.
- (4)
- This paper only studies the edge optimization effect of the voxel lattice method and will expand to more geometric types and new optimization algorithms in the future.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yuan, S.; Zhu, S.; Li, D.-S.; Luo, W.; Yu, Z.Y.; Yuan, L.W. Feature preserving multiresolution subdivision and simplification of point clouds: A conformal geometric algebra approach. Math. Methods Appl. Sci. 2018, 41, 4074–4087. [Google Scholar] [CrossRef]
- Wei, N.; Gao, K.Y.; Ji, R.; Chen, P. Surface Saliency Detection Based on Curvature Co-occurrence Histograms. IEEE Access 2018, 6, 54536–54541. [Google Scholar] [CrossRef]
- Abzal, A.; Saadatseresht, M.; Varshpsaz, M. Development of a Novel Simplification Mask for Multi-shot Optical Scanners. ISPRS J. Photogramm. Remote Sens. 2018, 142, 12–20. [Google Scholar] [CrossRef]
- Gan, Z.; Ma, B.; Ling, Z. PCA-based fast point feature histogram simplification algorithm for point clouds. Eng. Rep. 2023, e12800. [Google Scholar] [CrossRef]
- Wushour, S.; Cao, J. An Extraction Algorithm for Sharp Feature Points from Point Clouds. J. Xi’an Jiaotong Univ. 2012, 46, 73. [Google Scholar]
- Ding, X.; Lin, W.; Chen, Z.; Zhang, X. Point Cloud Saliency Detection by Local and Global Feature Fusion. IEEE Trans. Image Process. 2019, 28, 5379–5393. [Google Scholar] [CrossRef]
- Su, T.; Wang, W.; Lv, Z.; Wu, W.; Li, X. Rapid Delaunay triangulation for randomly distributed point cloud data using adaptive Hilbert curve. Comput. Graph. 2016, 54, 65–74. [Google Scholar] [CrossRef]
- Su, T.; Wang, W.; Liu, H.; Liu, Z.; Li, X.; Jia, Z.; Zhou, L.; Song, Z.; Ding, M.; Cui, A. An adaptive and rapid 3D Delaunay triangulation for randomly distributed point cloud data. Vis. Comput. 2020, 38, 197–221. [Google Scholar] [CrossRef]
- Dassi, F.; Ettinger, B.; Perotto, S.; Sangalli, L.M. A mesh simplification strategy for a spatial regression analysis over the cortical surface of the brain. Appl. Numer. Math. 2015, 90, 111–131. [Google Scholar] [CrossRef]
- Li, Y.; Pang, M. Decimating Point Cloud Based on Quadric Error Metric. J. Chin. Comp. Sys. 2012, 33, 2538–2542. [Google Scholar]
- Zhang, H.; Lan, X. An improved triangle mesh simplification based on edge collapse. Geotech. Investig. Surv. 2014, 43, 910–922. [Google Scholar]
- Zhang, D.; Cui, G.; Bai, D.; Li, Y.; Zhang, X.; Yang, Y. Point cloud simplification technology of 3D optical measurement applied on reverse engineering. Appl. Res. Comput. 2014, 31, 946–948. [Google Scholar]
- Xiao, Z.; Gao, J.; Wu, D.; Zhang, L. Voxel Grid Downsampling for 3D Point Cloud Recognition. Modul. Mach. Tool Autom. Manuf. Tech. 2021, 11, 43–47. [Google Scholar]
- Chen, Y.; Chen, J.; Zheng, M.; Chen, Z. LiDAR point cloud compression method based on non-uniform sparse sampling. J. Fuzhou Univ. Nat. Sci. Ed. 2021, 49, 329–335. [Google Scholar]
- Yan, J.; Liu, X.; Ju, L. An Algorithm for Confirming Size of Sampling Mesh Based on Maximum Accepted Error of Scattered Cloud Points. J. Shanghai Univ. Nat. Sci. 2003, 9, 35–37. [Google Scholar]
- Fu, W.; Wu, L.; Chen, H. Study on local and global point cloud data simplification algorithm. Laser Infrared 2015, 8, 1004–1008. [Google Scholar]
- Yuan, H.; Pang, J.; Mo, J. Research on Simplification Algorithm of Point Cloud Based on Voxel Grid. Video Eng. 2015, 39, 43–47. [Google Scholar]
- Chen, Y.; Yue, L. Point Cloud Resampling Algorithm of Feature-sensitivity. J. Chin. Comput. Syst. 2017, 38, 1086–1090. [Google Scholar]
- Li, G.; Li, Z.; Hou, D. Delaunay-based Non-uniform sampling for noisy point cloud. J. Comput. Appl. 2014, 34, 2922–2924+2929. [Google Scholar]
- Wei, L.; Wan, S.; Wang, Z.; Ding, X.; Zhang, W. Optimization Method for Level of Detail of Lossless Point Cloud Compression. J. Xi’an Jiaotong Univ. 2021, 55, 88–96. [Google Scholar]
- Fan, R.; Jin, X. Selection and Reduction Algorithms for Large Point Clouds. J. Graph. 2013, 34, 12–19. [Google Scholar]
- Xing, Y.; Song, T.; Zhao, Y.; Liu, G.; Zheng, M. Point Cloud reduction algorithm combining 3D-SIFT feature extraction and voxel filtering. Laser J. 2019, 44, 163–169. [Google Scholar]
- Zou, B.; Qiu, H.; Lu, Y. Point Cloud Reduction and Denoising Based on Optimized Down sampling and Bilateral Filtering. IEEE Access 2020, 99, 1. [Google Scholar]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Yang, H.; Yin, M.; Li, M.; Qu, Y.; Jia, X. Research on Lightweight Method of Segment Beam Point Cloud Based on Edge Detection Optimization. Buildings 2024, 14, 1221. https://doi.org/10.3390/buildings14051221
Dong Y, Yang H, Yin M, Li M, Qu Y, Jia X. Research on Lightweight Method of Segment Beam Point Cloud Based on Edge Detection Optimization. Buildings. 2024; 14(5):1221. https://doi.org/10.3390/buildings14051221
Chicago/Turabian StyleDong, Yan, Haotian Yang, Mingjun Yin, Menghui Li, Yuanhai Qu, and Xingli Jia. 2024. "Research on Lightweight Method of Segment Beam Point Cloud Based on Edge Detection Optimization" Buildings 14, no. 5: 1221. https://doi.org/10.3390/buildings14051221