
Optimal Cable Force Adjustment for Long-Span Concrete-Filled Steel Tube Arch Bridges: Real-Time Correction and Reliable Results

Abstract
:1. Introduction
2. Theory for a New Optimization Method for Suspender Cable Force
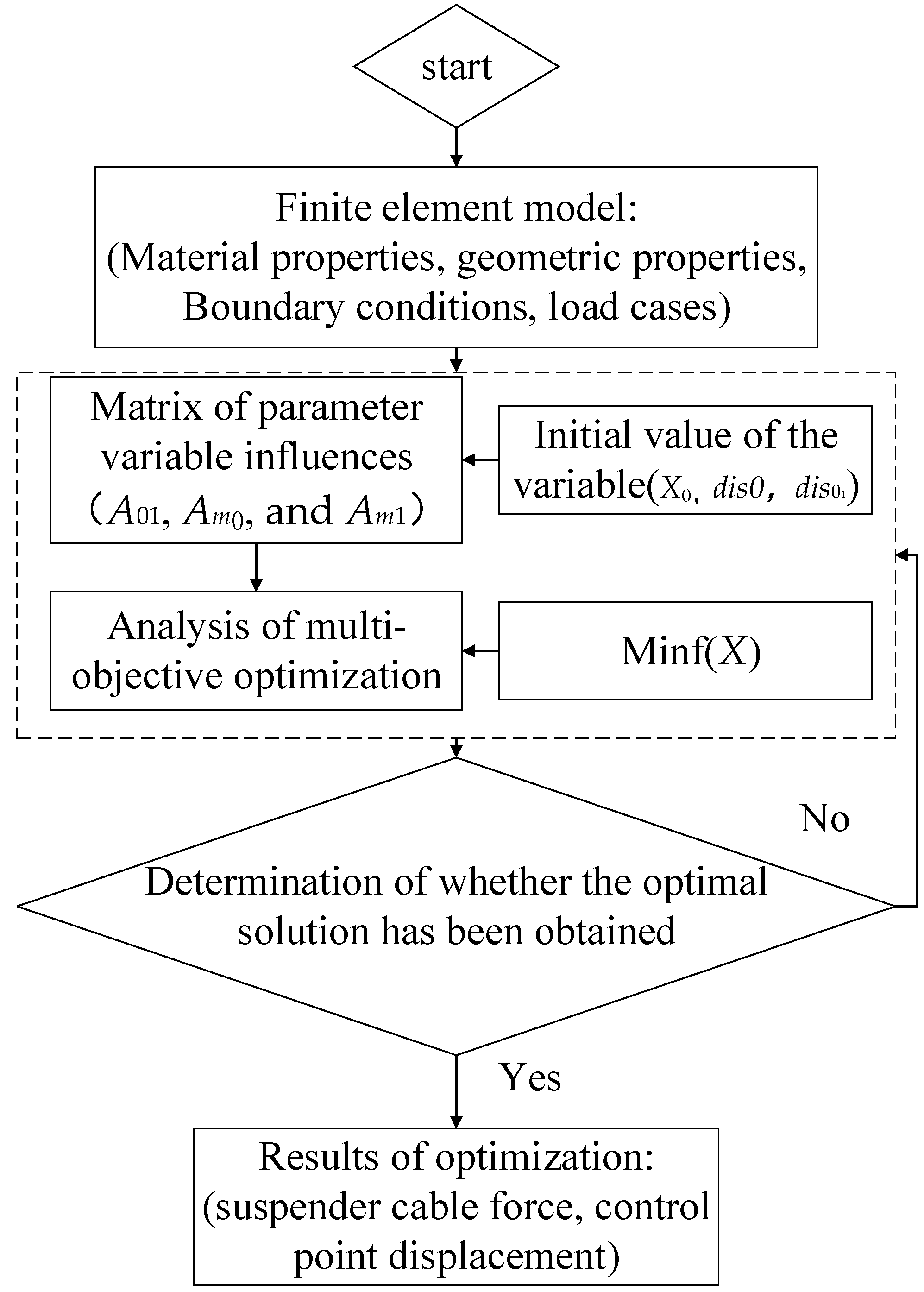
- Step 1: Firstly, a finite element model is established, of which the material properties, geometric properties, boundary conditions, and external loading information should be consistent with the corresponding data in the design drawing.
- Step 2: The initial tension forces (X0) for a group of suspenders are then determined, and this group of initial tensions (X0) is substituted into the finite element model in Step 1 for the process of forward analysis and calculation. After obtaining the initial value vectors (dis0 and dis01), the corresponding influence matrices (A01, Am0, and Am1) can be obtained by adding ΔX0.
- Step 3: An optimization system is established, which should have objective equations, constraints, and parameter variables at the same time. The optimization system includes the following:
- Step 4: The target displacement vector of the control point (dest) is set, generally dest = 0, which can be applied according to different bridge spans.
- Step 5: The determined parameters are substituted into the optimization equation to calculate the displacement and cable force of each control point for the current tensioning section and the final bridge completion stage.
3. Engineering Example Description
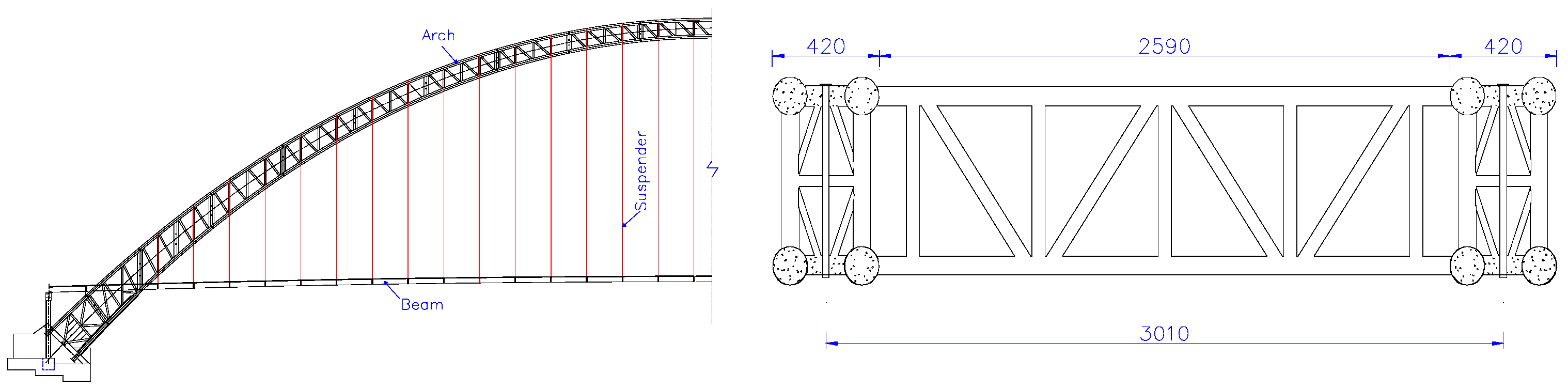
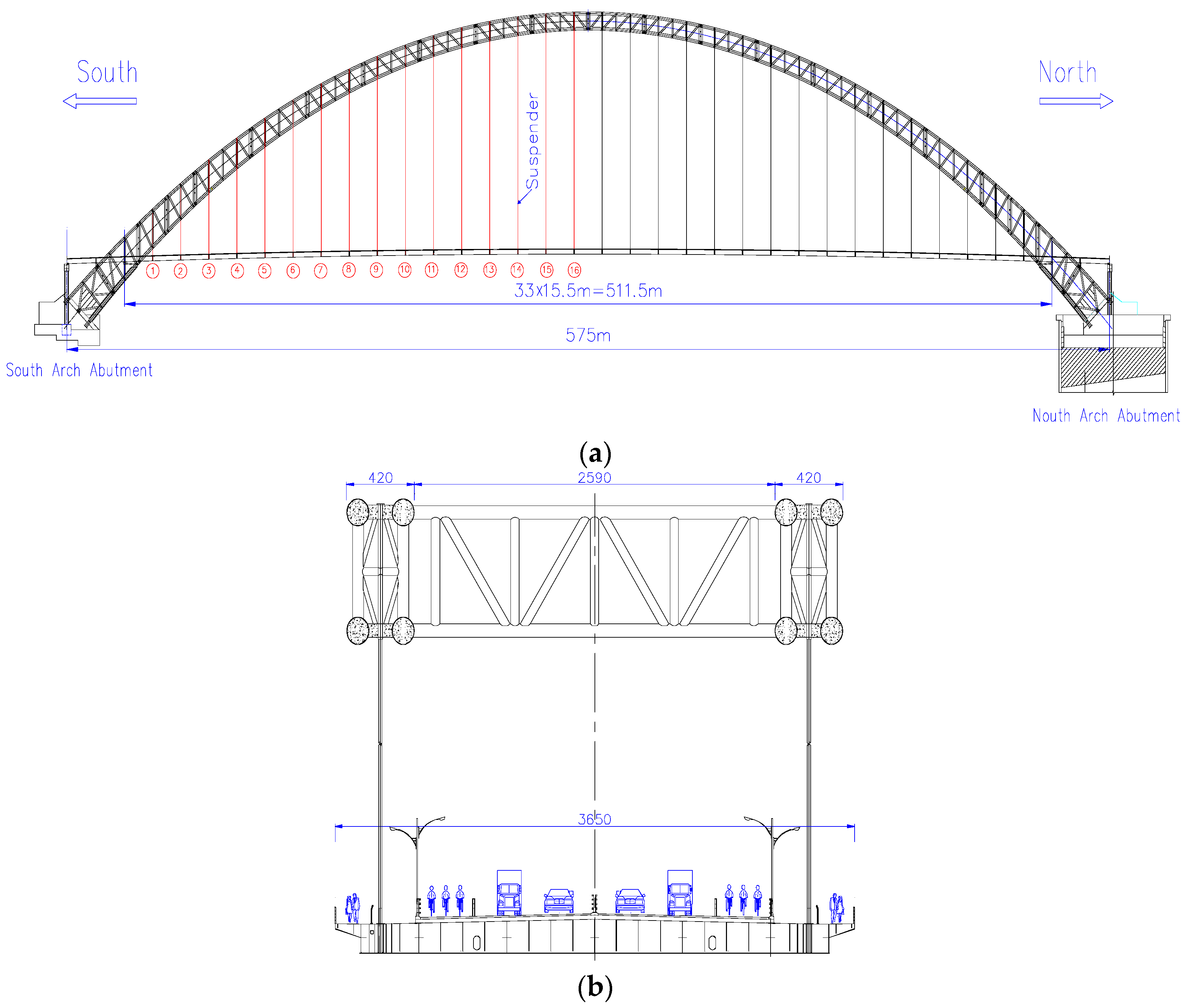
3.1. Third Pingnan Bridge
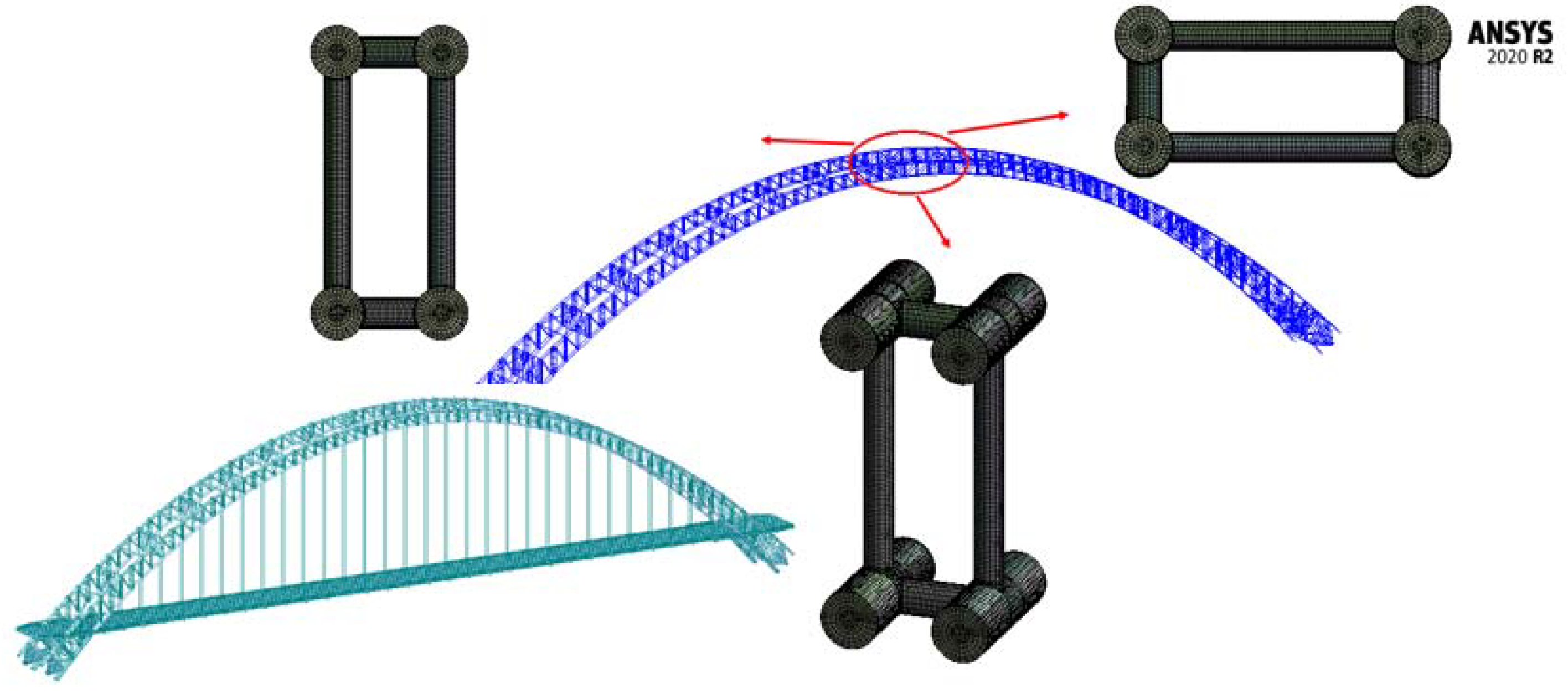
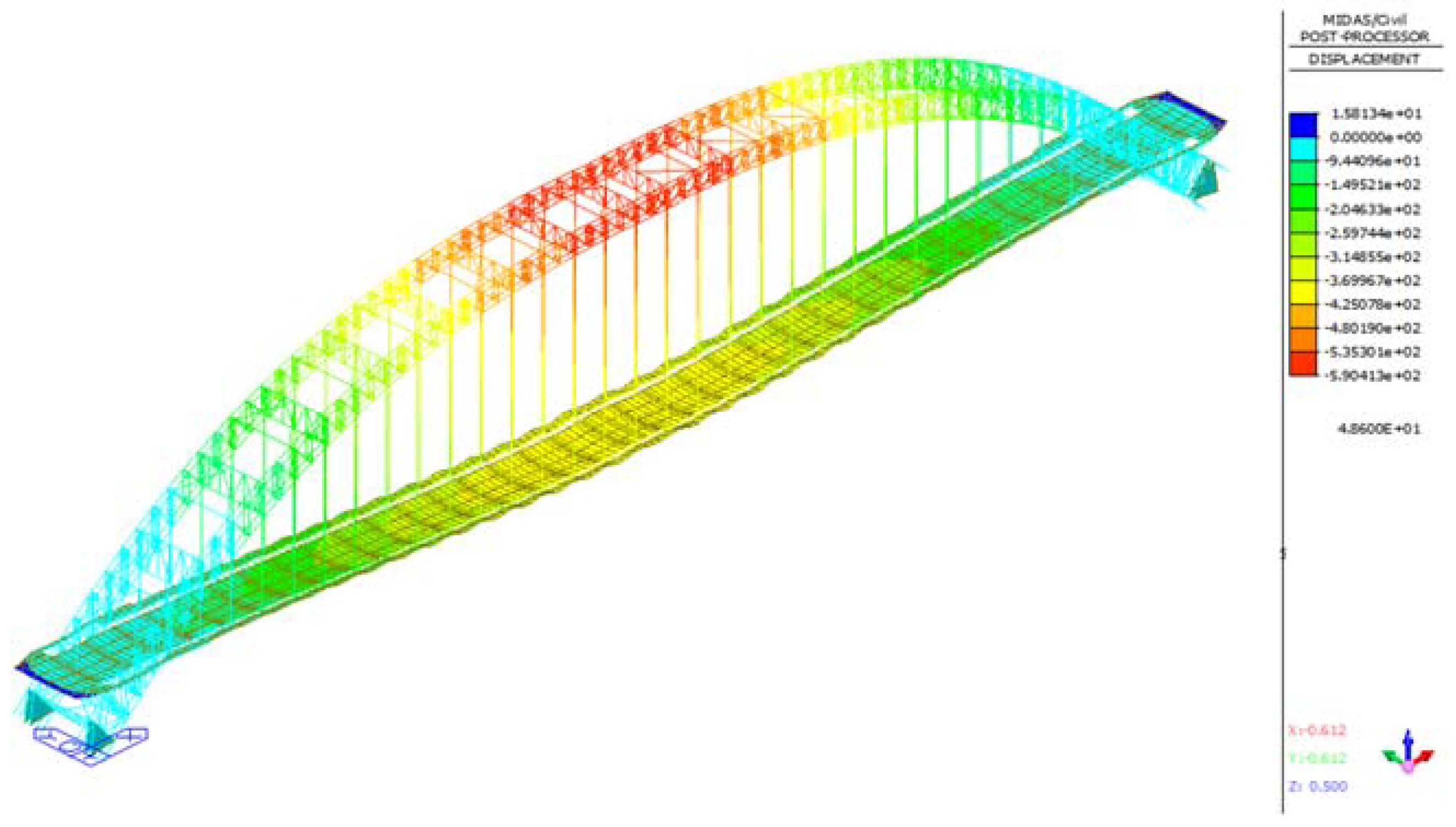
3.2. Modeling Simulation of the Third Pingnan Bridge
4. Optimization Analysis of the Suspender Cable Force
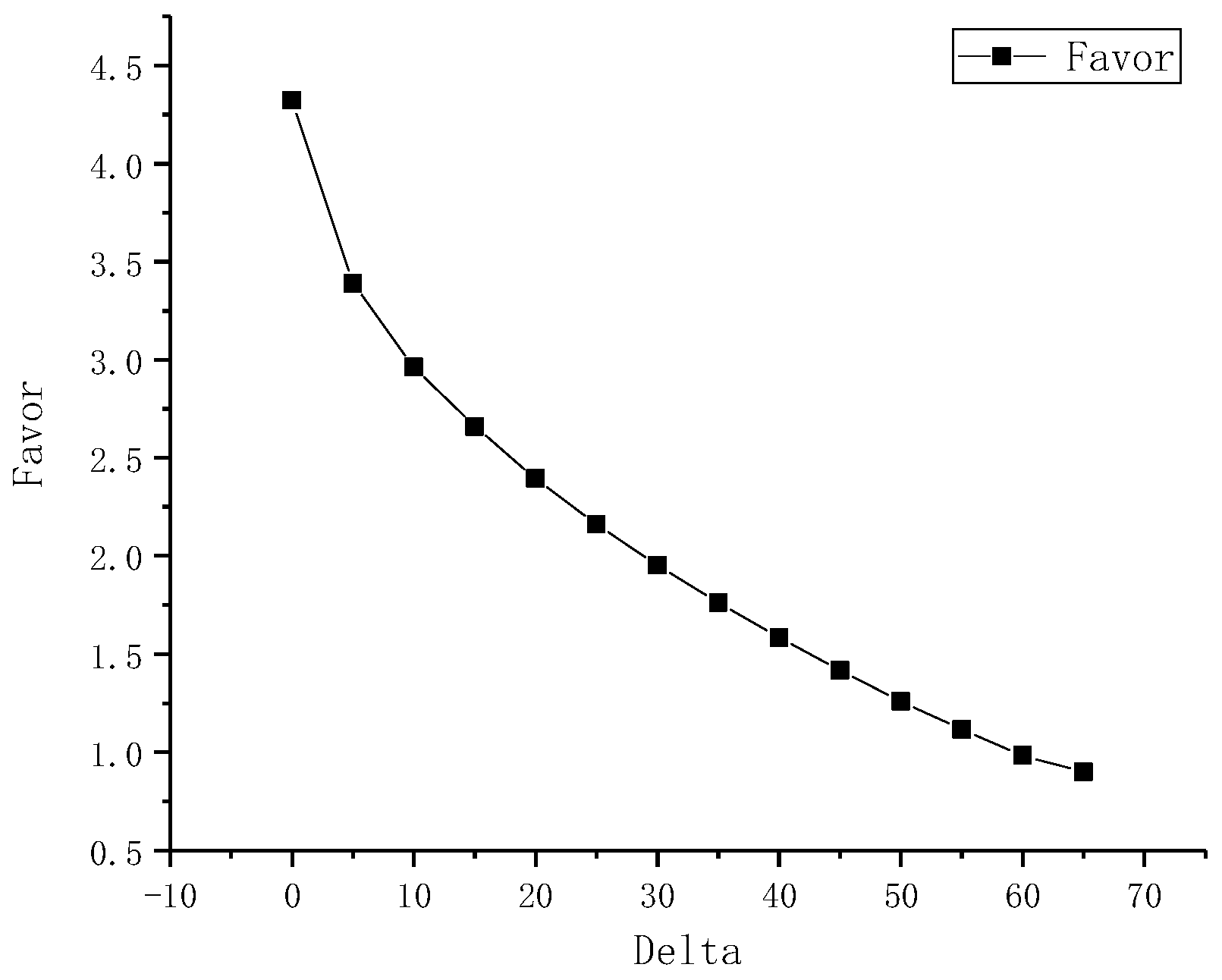
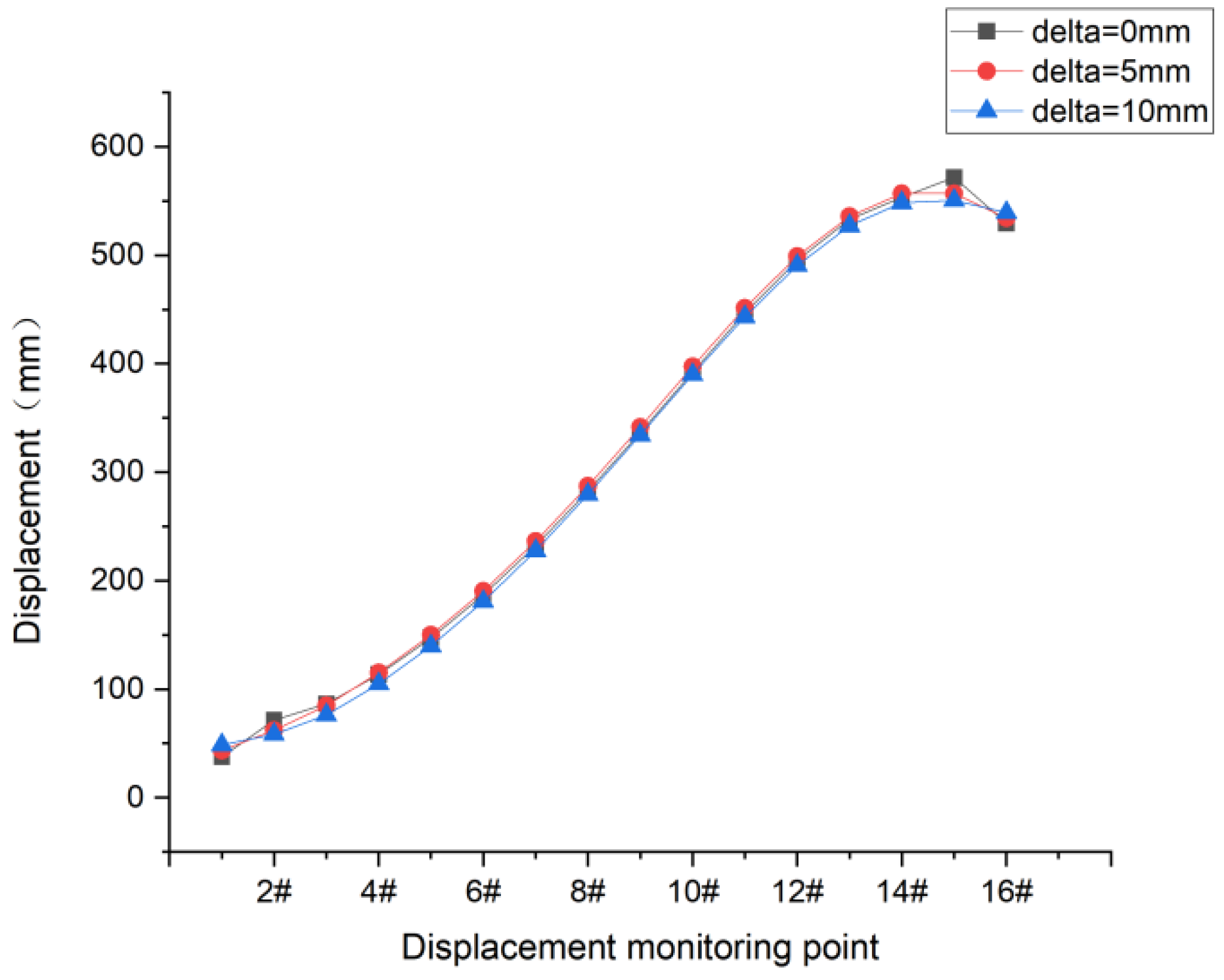
4.1. Analysis of the Allowable Value (Delta) and Optimization Dispersion (Favor) of Optimization Convergence
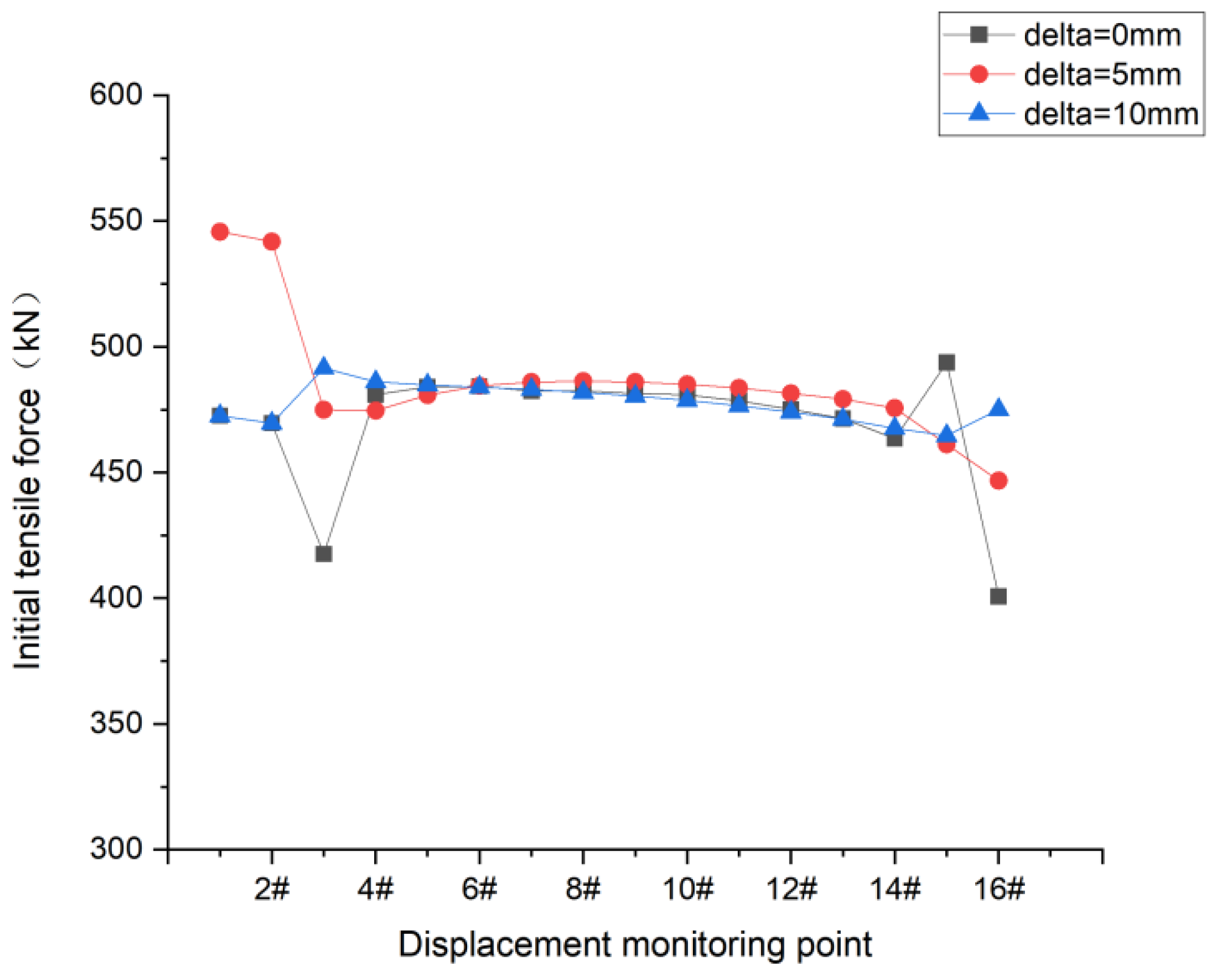
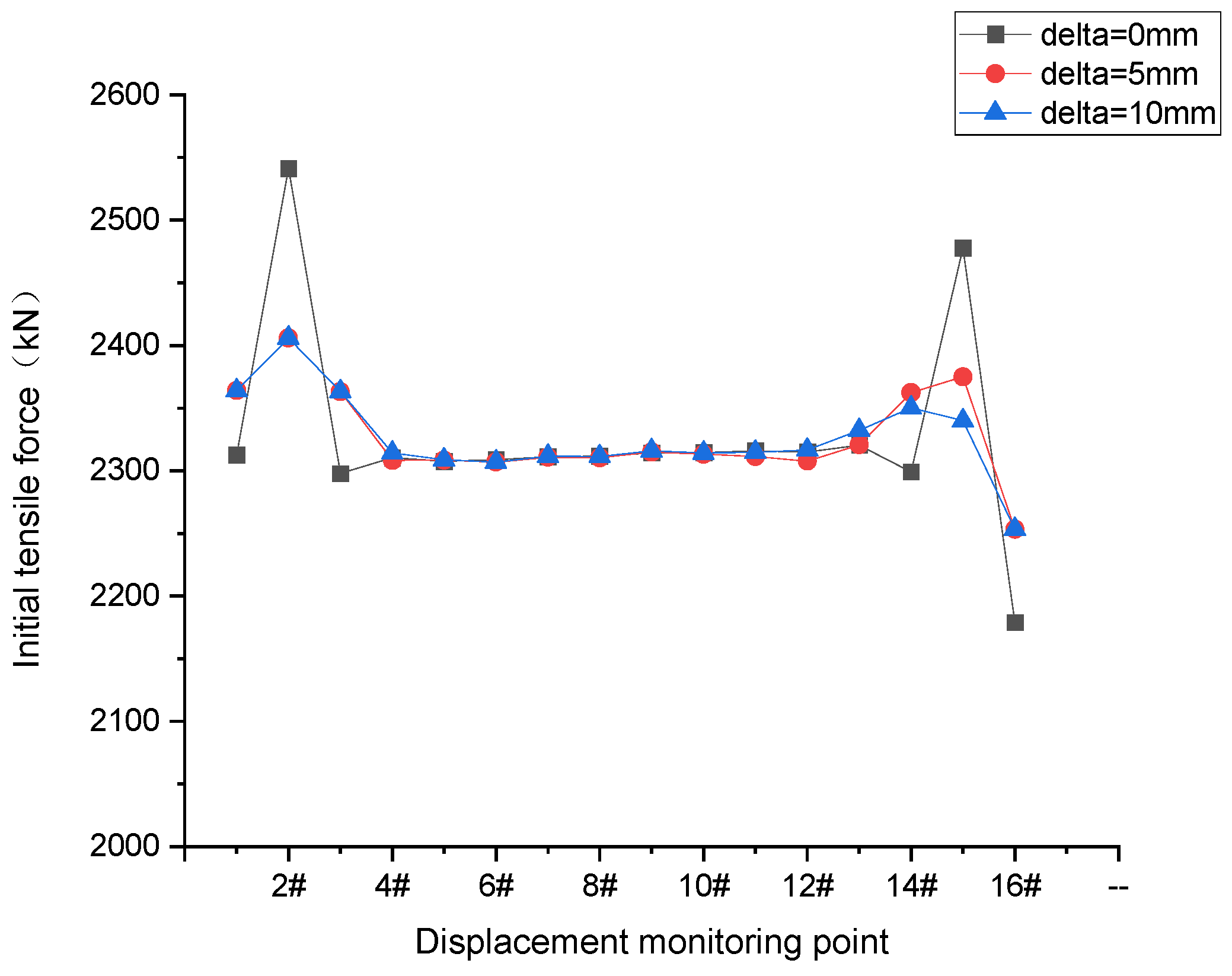
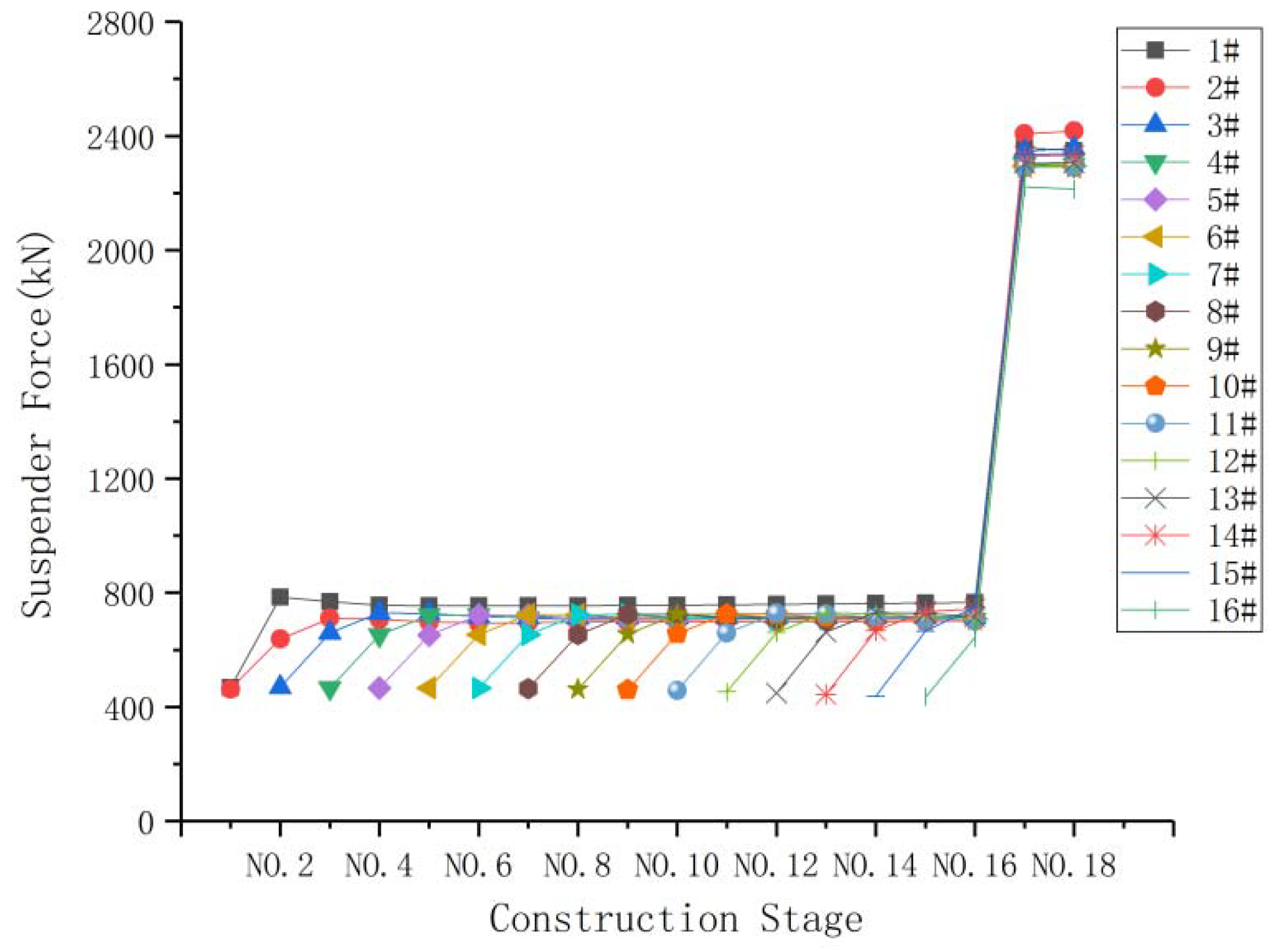
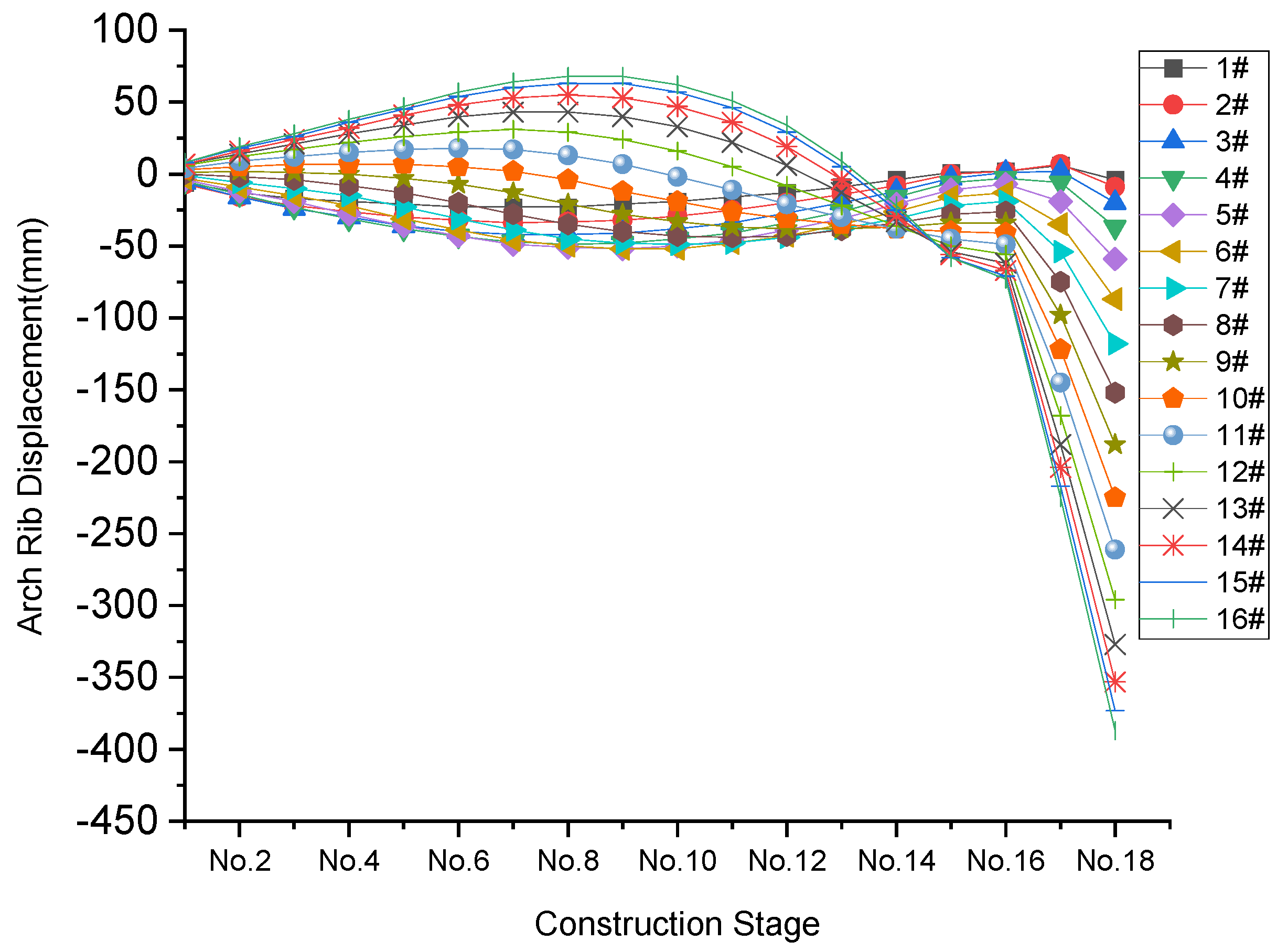
4.2. Optimization Effects of the Suspender Cable Force
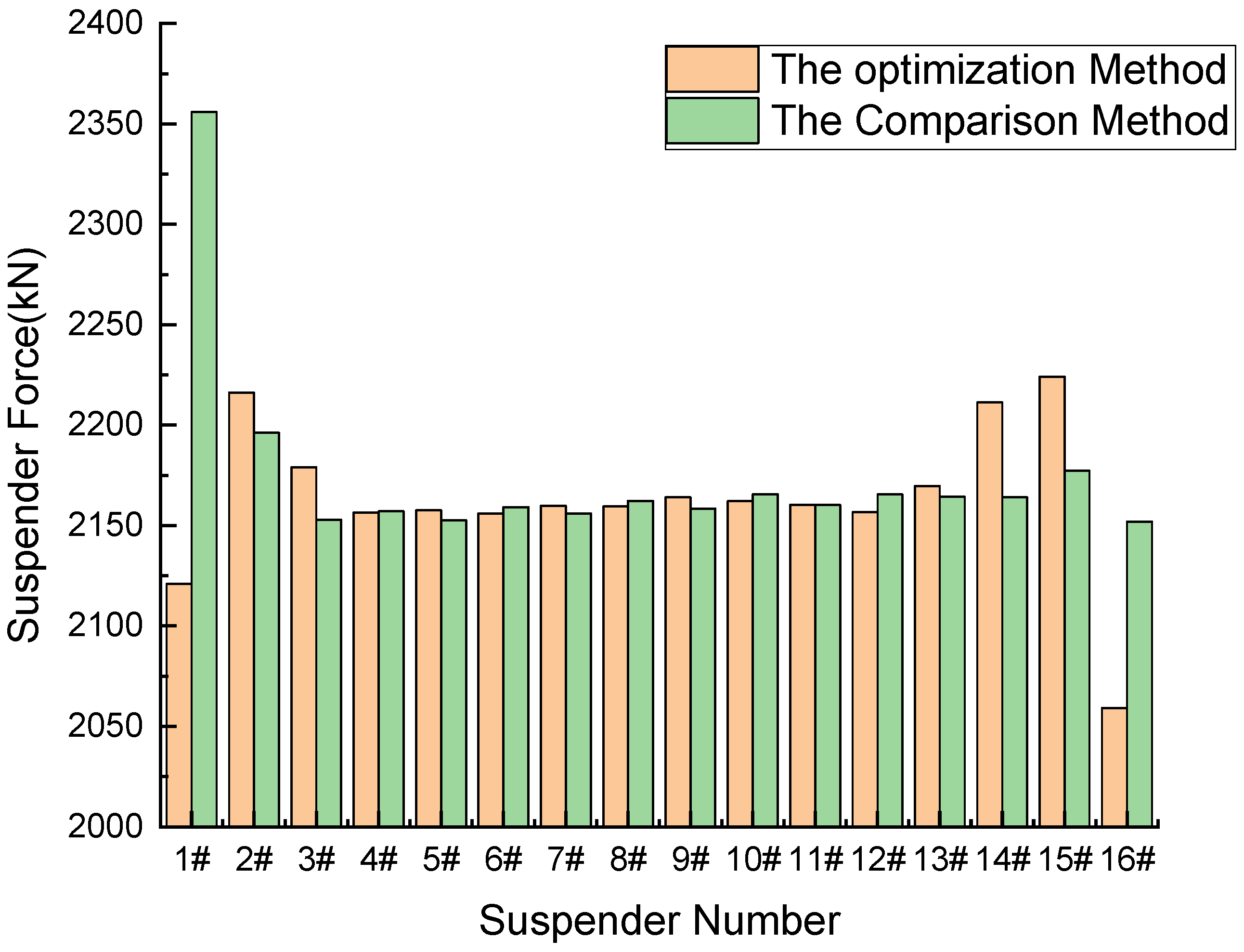
4.3. Verification of the Optimization Method for Suspender Cable Force
5. Conclusions
- (1)
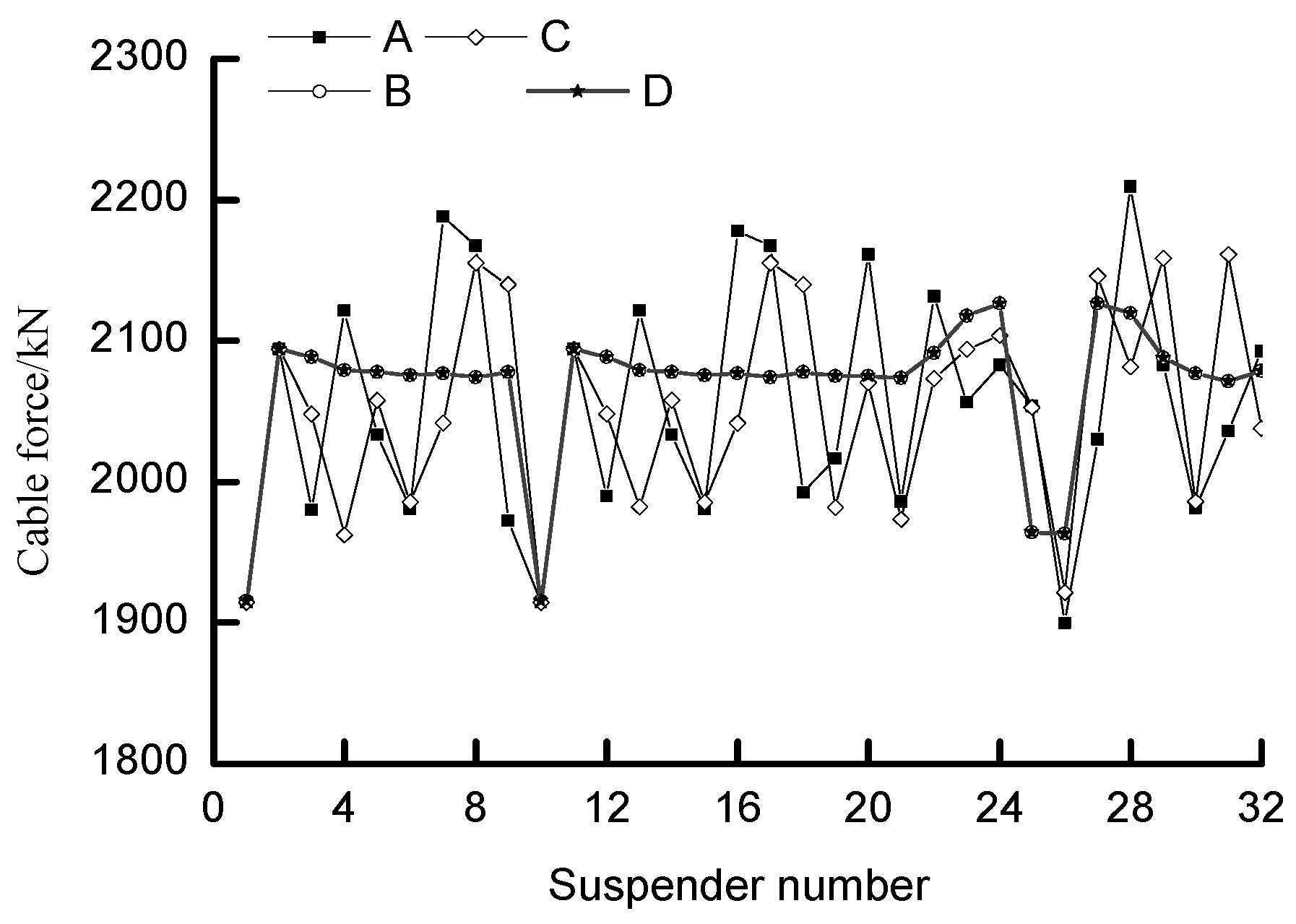
- In this paper, a new method for optimizing suspender cable force is proposed, which can minimize the increment of lattice beam displacement and target value differences in the construction process. The subsequent tensioning section has the least impact on the displacement of the constructed section, the standard deviation of the displacement of 1# suspender ~ 10# suspender is 15mm ± 2mm, and the standard deviation of the displacement of 11# suspender~16# suspender is 35mm ± 9mm. The cable force of the completed bridge is uniform, the standard deviation of the suspender cable force is only 43 kN, and the difference between the maximum cable force and the minimum cable force is 203 kN. The alignment of the completed bridge converges to the target value, the displacement is within 5mm, and the calculation result is reliable.
- (2)
- The bridge deck system construction of a concrete-filled steel tubular arch bridge with different spans and construction sequences is calculated quickly, which has strong practicability and a wide application range.
- (3)
- The traditional reverse demolition method is simple and practical for implementation but overlooks important factors, such as concrete shrinkage, creep, and structural geometric nonlinearity. For complex structures, the existing optimization methods for suspender cable forces involve extensive matrix operations that demand high computational power and time. Consequently, obtaining a more accurate solution becomes challenging. To address this, a new method for cable force optimization is proposed to improve the stress distribution of suspenders in the completed state and minimize the need for frequent cable force adjustments and grid beam elevation changes during construction. This method offers several advantages over other approaches. Unlike the forward iteration method, it avoids the need for repetitive calculations once the cable force after the completion of the bridge is known. Additionally, compared to the minimum bending energy method, it considers the construction process, resulting in calculation conditions that closely reflect the actual situation. As a result, it can more accurately simulate the load distribution of the bridge deck system.
- (4)
- In the actual bridge hoisting construction, through the real-time correction of the design parameters and system reoptimization, process deviation correction can be realized, so as to ensure that the completed bridge state meets the requirements.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, J. Innovative Technology for 500-Meter Scale CFST Arch Bridge Construction; Shanghai Science and Technology Press: Shanghai, China, 2020. [Google Scholar]
- Zheng, J. Quality and Risk: Concrete Filled Steel Tubular Arch Bridge. China Highw. 2018, 22, 40. [Google Scholar]
- Chen, B. CFST Arch Bridge; People’s Communications Press: Beijing, China, 2007. [Google Scholar]
- Zheng, J. Development and prospect of long-span arch bridge. China Highw. 2017, 13, 40–42. [Google Scholar]
- Zheng, J.; Wang, J.; Mou, T.; Fenh, Z.; Han, Y.; Qin, D. Feasibility Research on Design and Construction of 700 m CFST Arch Bridge. China Eng. Sci. 2014, 16, 5. [Google Scholar]
- Chen, B.; Zheng, J.; Zhou, J. pplication status and Prospect of CFST arch bridge in China. J. Civ. Eng. 2017, 50, 12. [Google Scholar]
- Zheng, J.; Wang, J. Concrete-Filled Steel Tube Arch Bridge in China. Engineering 2018, 4, 13. [Google Scholar] [CrossRef]
- Yan, D. Iterative method for determining the reasonable construction state of cable-stayed bridges. China J. Highw. Transp. 1999, 12, 6. [Google Scholar]
- Li, Q.; Zhao, Z.; Jie, L. Application of iterative method in construction control of suspender of tie-down tied arch bridge. China Foreign Highw. 2015, 35, 4. [Google Scholar]
- Yang, J.; Shen, C.; Sheng, J. Summarizing the Methods of Determination of Rational Completion Status of Cable-Stayed Bridges. Eng. Sci. 2006, 4, 9. [Google Scholar]
- Xin, K. Nonlinear backward analysis of large span cable-stayed bridge construction. Eng. Mech. 2004, 5, 31–35. [Google Scholar]
- Xu, Y.; Zhan, B.; Li, Y. An Optimum Calculation Method of Cable Force of CFST Arch Bridge in Inclined Cable Hoisting Construction. Highw. Transp. Sci. Technol. 2016, 33, 7. [Google Scholar]
- Sung, Y.-C.; Chang, D.-W.; Teo, E.-H. Optimum post-tensioning cable forces of Mau-Lo Hsi cable-stayed bridge. Eng. Struct. 2006, 28, 1407–1417. [Google Scholar] [CrossRef]
- Liu, Z. Determination of the optimal hanger for tied-arch bridges based on energy methods. Eng. Mech. 2009, 26, 6. [Google Scholar]
- Zhao, W.; Zhen, J.; Lu, S. Optimization Analysis of suspender tension in super long-span tied steel arch bridge at completion state. J. China Foreign Highw. 2016, 36, 6. [Google Scholar]
- Zhang, J.; Zheng, Y.; Xiao, R. Calculation method for optimizing the installation process of concrete-filled steel tube arch bridge. J. China Highw. 2005, 18, 40–44. [Google Scholar]
- Xiao, R.; Xiang, H. Influence matrix method of tension optimization for cable-stayed bridges. J. Tongji Univ. (Nat. Sci. Ed.) 1998, 26, 6. [Google Scholar]
- Che, X.; Du, B.; Zhang, X. Comparative Analysis of Methods for Determining the Suspension Cable Force of the Reinforced Concrete Tied Arch Bridge. Constr. Technol. 2018, 47, 4. [Google Scholar]
- Fu, J.; Huang, T. Applicability analysis of Optimum Methods for hanger forces of rigid tied-arch bridges at completion stage. J. Railw. Sci. Eng. 2014, 11, 8. [Google Scholar]
- Yang, X.; Zhou, S. Method to determine construction cable tension force of cable-stayed bridge. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2008, 27, 5. [Google Scholar]
- Nakayama, H.; Kaneshige, K.; Takemoto, S.; Watada, Y. An application of a multi-objective programming technique to construction accuracy control of cable-stayed bridges. Eur. J. Oper. Res. 1995, 87, 731–738. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Y. Optimization of stayed-buckle cable forces during adjustment of alignment on long span arch bridges. Eng. Mech. 2004, 21, 6. [Google Scholar]
- Han, Y.; Qin, D.; Zheng, J. Optimal calculation method for CFST arch bridge during cable-stayed buckle construction. Highway 2018, 63, 5. [Google Scholar]
- Du, H.; Qin, D.; Luo, X. Construction control of super-long-span arch bridges. Highway 2019, 6, 103–107. [Google Scholar]
- Jie, D.; Feng, J.; Qin, F.; Jin, D.; Cheng, Y. Review on Cable Force Optimization Method for Cable-stayed Bridge in Completed Bridge State. China J. Highw. Transp. 2019, 32, 5. [Google Scholar]
- Zhan, Y.; Hou, Z.; Shao, J. Cable Force Optimization of Irregular Cable-Stayed Bridge Based on Response Surface Method and ParticleS warm Optimization Algorithm. Bridge Constr. 2022, 52, 3. [Google Scholar]
- Kasuga, A.; Arai, H.; Breen, J.E.; Furukawa, K. Optimum cable-force adjustments in concrete cable-stayed bridges. J. Struct. Eng. 1995, 121, 685–694. [Google Scholar] [CrossRef]
- Martins, A.; Simões, L.; Negrão, J. Optimization of cable forces on concrete cable-stayed bridges including geometrical nonlinearities. Comput. Struct. 2015, 155, 18–27. [Google Scholar] [CrossRef]
- Baldomir, A.; Hernandez, S.; Nieto, F.; Jurado, J.A. Cable optimization of a long span cable stayed bridge in La Coruña (Spain). Adv. Eng. Softw. 2010, 41, 8. [Google Scholar] [CrossRef]
- Hassan, M. Optimization of stay cables in cable-stayed bridges using finite element, genetic algorithm, and B-spline combined technique. Eng. Struct. 2013, 49, 643–654. [Google Scholar] [CrossRef]
- Negrão, J.H.O.; Simões, L.M.C. Optimization of cable-stayed bridges with three-dimensional modelling. Comput. Struct. 1997, 28, 18. [Google Scholar] [CrossRef]
- Guo, J.; Yuan, W.; Dang, X.; Alam, M.S. Cable force optimization of a curved cable-stayed bridge with combined simulated annealing method and cubic B-Spline interpolation curves. Eng. Struct. 2019, 201, 109813. [Google Scholar] [CrossRef]
- Janjic, D.; Pircher, M.; Pircher, H. Optimization of Cable Tensioning in Cable-Stayed Bridges. J. Bridg. Eng. ASCE 2003, 8, 131–137. [Google Scholar] [CrossRef]
- Latif, M.; Saka, M. Optimum design of tied-arch bridges under code requirements using enhanced artificial bee colony algorithm. Adv. Eng. Softw. 2019, 135, 102685. [Google Scholar] [CrossRef]
- Martins, A.M.; Simões, L.M.; Negrão, J.H. Optimization of cable-stayed bridges: A literature survey. Adv. Eng. Softw. 2020, 149, 102829. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, N.; Du, X.; Wang, S.; Sun, Q. Multiobjective Optimization of Cable Forces and Counterweights for Universal Cable-Stayed Bridges. J. Adv. Transp. 2021, 2021, 6615746. [Google Scholar] [CrossRef]
- Guo, J.; Guan, Z. Optimization of the cable forces of completed cable-stayed bridges with differential evolution method. Structures 2023, 47, 1416–1427. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, N.; Cheng, Q. Multi-objective optimization-based reasonable finished state in long-span cable-stayed bridge considering counterweights. Structures 2023, 51, 1497–1506. [Google Scholar] [CrossRef]
- Zucca, M.; Crespi, P.; Stochino, F.; Puppio, M.L.; Coni, M. Maintenance interventions period of existing RC motorway viaducts located in moderate/high seismicity zones. Structures 2023, 47, 976–990. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Elastic Modulus/MPa | Bulk Density/kN·m−3 | Section Size/mm |
|---|---|---|---|
| Main chord tube | 2.06 × 105 | 78 | Φ 1400 × 26 |
| Suspender | 1.95 × 105 | 78 | 37 Φ 15.2 |
| Main beam | 2.06 × 105 | 78 | 2200 |
| C40 | 3.25 × 104 | 25 | 240/150 |
| C70 | 3.70 × 104 | 25 | Φ 1400 |
| Construction Stage | Suspender Cable Force Values in Different Construction Sections/kN | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1# | 2# | 3# | 4# | 5# | 6# | 7# | 8# | 9# | 10# | 11# | 12# | 13# | 14# | 15# | 16# | |
| 1# and 2# tension | 468 | 463 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 3# tension | 784 | 638 | 470 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 4# tension | 769 | 711 | 660 | 466 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 5# tension | 757 | 707 | 730 | 652 | 467 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 6# tension | 754 | 697 | 727 | 722 | 652 | 467 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 7# tension | 755 | 694 | 717 | 721 | 722 | 653 | 466 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 8# tension | 755 | 695 | 713 | 711 | 722 | 723 | 654 | 464 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 9# tension | 755 | 697 | 713 | 706 | 711 | 723 | 723 | 654 | 462 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 10# tension | 756 | 698 | 714 | 706 | 707 | 713 | 724 | 724 | 655 | 460 | 0 | 0 | 0 | 0 | 0 | 0 |
| 11# tension | 757 | 698 | 714 | 707 | 706 | 708 | 713 | 725 | 725 | 657 | 457 | 0 | 0 | 0 | 0 | 0 |
| 12# tension | 758 | 699 | 715 | 707 | 707 | 707 | 708 | 714 | 725 | 726 | 659 | 453 | 0 | 0 | 0 | 0 |
| 13# tension | 759 | 699 | 715 | 707 | 707 | 708 | 707 | 708 | 713 | 726 | 728 | 661 | 449 | 0 | 0 | 0 |
| 14# tension | 761 | 700 | 715 | 707 | 708 | 708 | 708 | 707 | 708 | 714 | 726 | 730 | 663 | 444 | 0 | 0 |
| 15# tension | 762 | 700 | 715 | 707 | 708 | 708 | 709 | 708 | 707 | 708 | 714 | 727 | 731 | 667 | 438 | 0 |
| 16# tension | 764 | 701 | 715 | 707 | 708 | 708 | 709 | 709 | 708 | 707 | 708 | 714 | 727 | 734 | 666 | 435 |
| Closure stage | 765 | 701 | 715 | 707 | 708 | 708 | 709 | 709 | 708 | 708 | 706 | 707 | 717 | 743 | 750 | 643 |
| After pavement | 2358 | 2408 | 2347 | 2299 | 2293 | 2293 | 2295 | 2294 | 2295 | 2294 | 2292 | 2293 | 2304 | 2329 | 2336 | 2222 |
| Construction Stage | Displacement Values for the Grid Beam in Different Construction Sections/mm | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1# | 2# | 3# | 4# | 5# | 6# | 7# | 8# | 9# | 10# | 11# | 12# | 13# | 14# | 15# | 16# | |
| 1# and 2# tension | 43 | 62 | - | - | - | - | - | - | - | - | - | - | - | - | - | - |
| 3# tension | 29 | 47 | 85 | - | - | - | - | - | - | - | - | - | - | - | - | - |
| 4# tension | 26 | 39 | 69 | 115 | - | - | - | - | - | - | - | - | - | - | - | - |
| 5# tension | 23 | 34 | 59 | 97 | 150 | - | - | - | - | - | - | - | - | - | - | - |
| 6# tension | 21 | 31 | 54 | 86 | 130 | 190 | - | - | - | - | - | - | - | - | - | - |
| 7# tension | 20 | 29 | 51 | 80 | 118 | 169 | 236 | - | - | - | - | - | - | - | - | - |
| 8# tension | 20 | 28 | 49 | 77 | 113 | 157 | 214 | 287 | - | - | - | - | - | - | - | - |
| 9# tension | 20 | 28 | 48 | 76 | 111 | 153 | 202 | 264 | 342 | - | - | - | - | - | - | - |
| 10# tension | 21 | 29 | 49 | 77 | 111 | 151 | 198 | 252 | 317 | 397 | - | - | - | - | - | - |
| 11# tension | 23 | 32 | 52 | 79 | 112 | 152 | 198 | 249 | 305 | 371 | 451 | - | - | - | - | - |
| 12# tension | 26 | 36 | 57 | 84 | 117 | 156 | 200 | 249 | 301 | 357 | 421 | 499 | - | - | - | - |
| 13# tension | 30 | 41 | 63 | 91 | 123 | 161 | 204 | 251 | 301 | 352 | 405 | 464 | 536 | - | - | - |
| 14# tension | 34 | 47 | 70 | 99 | 131 | 169 | 210 | 254 | 301 | 349 | 396 | 443 | 494 | 557 | - | - |
| 15# tension | 38 | 54 | 79 | 108 | 141 | 178 | 217 | 259 | 303 | 347 | 389 | 429 | 466 | 506 | 557 | - |
| 16# tension | 43 | 61 | 88 | 118 | 151 | 187 | 226 | 265 | 305 | 344 | 382 | 416 | 446 | 472 | 498 | 534 |
| Closure stage | 45 | 63 | 91 | 122 | 155 | 191 | 229 | 267 | 306 | 343 | 379 | 411 | 439 | 460 | 475 | 495 |
| After pavement | 15 | 11 | 20 | 32 | 43 | 54 | 67 | 80 | 94 | 107 | 120 | 131 | 140 | 146 | 150 | 164 |
| Shrinkage and creep | 5 | −5 | −2 | 1 | 2 | 2 | 3 | 4 | 4 | 4 | 3 | 3 | 1 | −3 | −4 | 4 |
| Construction Stage | Arch Rib Displacement in Different Construction Sections/mm | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1# | 2# | 3# | 4# | 5# | 6# | 7# | 8# | 9# | 10# | 11# | 12# | 13# | 14# | 15# | 16# | |
| 1# and 2# tension | −6 | −7 | −6 | −5 | −4 | −3 | −1 | 0 | 1 | 3 | 4 | 6 | 7 | 7 | 8 | 8 |
| 3# tension | −13 | −16 | −16 | −14 | −12 | −9 | −6 | −2 | 2 | 5 | 9 | 12 | 14 | 16 | 18 | 19 |
| 4# tension | −17 | −22 | −24 | −23 | −19 | −15 | −10 | −4 | 1 | 7 | 12 | 17 | 21 | 24 | 26 | 28 |
| 5# tension | −19 | −26 | −30 | −31 | −28 | −22 | −15 | −8 | 0 | 7 | 15 | 22 | 28 | 32 | 36 | 38 |
| 6# tension | −21 | −30 | −36 | −38 | −36 | −31 | −23 | −13 | −3 | 7 | 17 | 26 | 34 | 41 | 45 | 47 |
| 7# tension | −23 | −32 | −40 | −43 | −43 | −39 | −31 | −20 | −7 | 5 | 18 | 29 | 40 | 48 | 54 | 57 |
| 8# tension | −23 | −34 | −42 | −47 | −49 | −46 | −39 | −28 | −13 | 2 | 17 | 31 | 43 | 53 | 60 | 64 |
| 9# tension | −23 | −33 | −42 | −49 | −51 | −50 | −45 | −35 | −21 | −4 | 13 | 29 | 43 | 55 | 63 | 68 |
| 10# tension | −21 | −32 | −41 | −48 | −52 | −52 | −48 | −40 | −28 | −12 | 7 | 24 | 40 | 53 | 63 | 68 |
| 11# tension | −19 | −29 | −38 | −45 | −50 | −52 | −49 | −43 | −33 | −19 | −2 | 16 | 33 | 47 | 57 | 62 |
| 12# tension | −16 | −25 | −34 | −41 | −46 | −48 | −48 | −44 | −37 | −26 | −11 | 5 | 22 | 36 | 46 | 51 |
| 13# tension | −13 | −20 | −27 | −34 | −39 | −43 | −44 | −43 | −38 | −31 | −21 | −8 | 6 | 19 | 29 | 34 |
| 14# tension | −9 | −14 | −20 | −26 | −31 | −35 | −38 | −39 | −38 | −35 | −30 | −22 | −13 | −4 | 5 | 9 |
| 15# tension | −4 | −8 | −12 | −16 | −21 | −26 | −31 | −34 | −37 | −38 | −38 | −36 | −33 | −29 | −25 | −22 |
| 16# tension | 1 | 0 | −3 | −6 | −11 | −16 | −22 | −28 | −34 | −40 | −45 | −50 | −54 | −56 | −58 | −58 |
| Closure stage | 2 | 2 | 1 | −3 | −7 | −13 | −19 | −26 | −34 | −41 | −49 | −56 | −62 | −67 | −71 | −73 |
| After pavement | 6 | 7 | 2 | −6 | −19 | −35 | −54 | −75 | −98 | −122 | −145 | −168 | −188 | −204 | −217 | −225 |
| Methods | Bridge Components/kN | |||
|---|---|---|---|---|
| Beam End | Column and Cross Beam Between Ribs | Suspender | Resultant Force | |
| The proposed method | 4659 | 20,180 | 147,845 | 172,684 |
| Minimum bending energy method | 4993 | 18,852 | 148,838 | 172,684 |
| Difference | −335 | 1328 | −993 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, M.; Yao, X.; Deng, N.; Hao, T.; Wang, L.; Wang, H. Optimal Cable Force Adjustment for Long-Span Concrete-Filled Steel Tube Arch Bridges: Real-Time Correction and Reliable Results. Buildings 2023, 13, 2214. https://doi.org/10.3390/buildings13092214
Yu M, Yao X, Deng N, Hao T, Wang L, Wang H. Optimal Cable Force Adjustment for Long-Span Concrete-Filled Steel Tube Arch Bridges: Real-Time Correction and Reliable Results. Buildings. 2023; 13(9):2214. https://doi.org/10.3390/buildings13092214
Chicago/Turabian StyleYu, Mengsheng, Xinyu Yao, Nianchun Deng, Tianzhi Hao, Longlin Wang, and Hua Wang. 2023. "Optimal Cable Force Adjustment for Long-Span Concrete-Filled Steel Tube Arch Bridges: Real-Time Correction and Reliable Results" Buildings 13, no. 9: 2214. https://doi.org/10.3390/buildings13092214