

Nonlinear Stress-Free-State Forward Analysis Method of Long-Span Cable-Stayed Bridges Constructed in Stages
Abstract
:1. Introduction
2. The Geometric Nonlinear Mechanics Equation of the Staged-Construction Bar System
2.1. The Mechanics Equilibrium Equation of the Staged-Construction Bar System
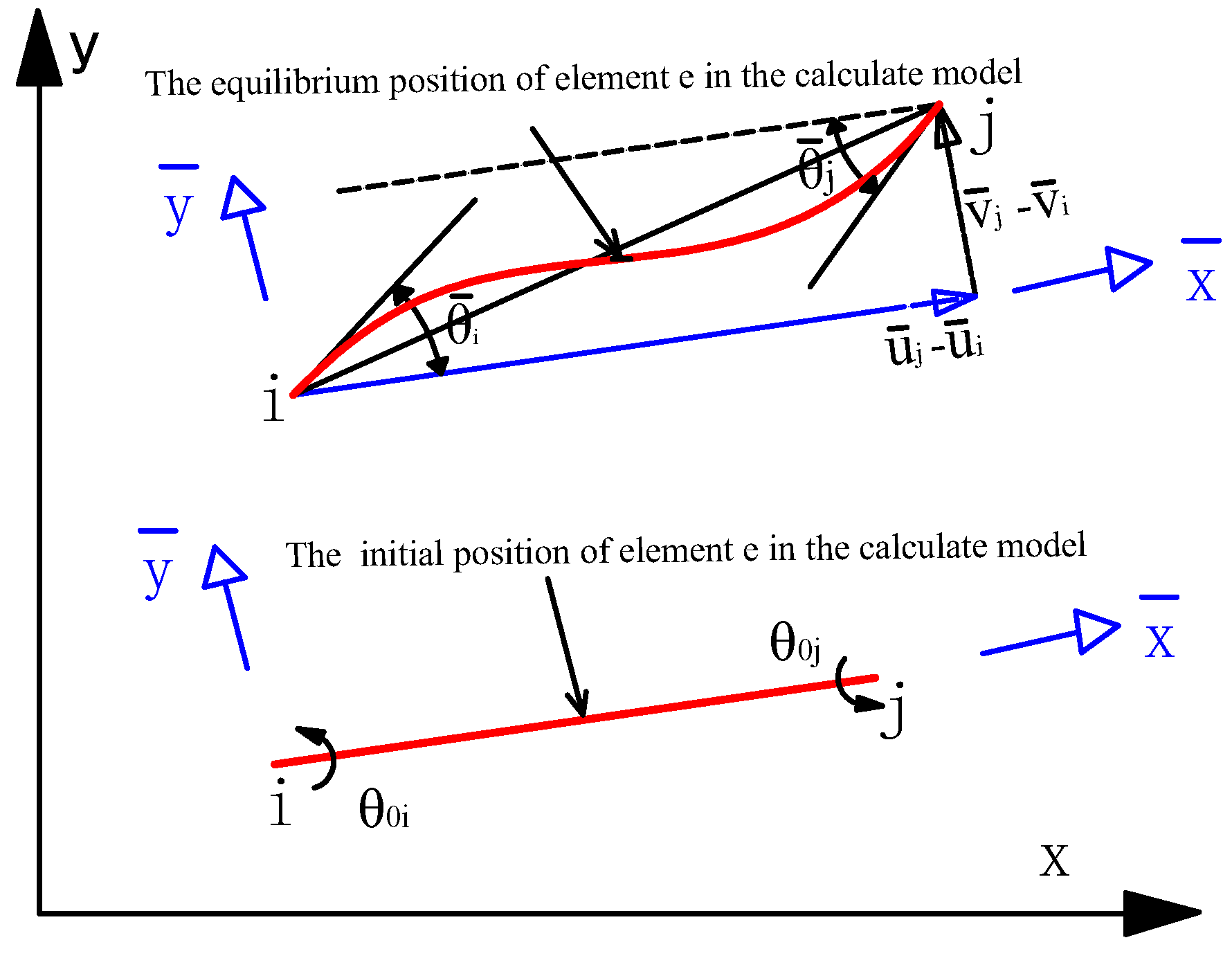
2.2. The Geometric Nonlinear Mechanics Equations of the Staged-Construction Planar Beam Structure
3. Nonlinear Stress-Free-State Forward Analysis Method for Long-Span Cable-Stayed Bridges
4. Application to a Real Bridge
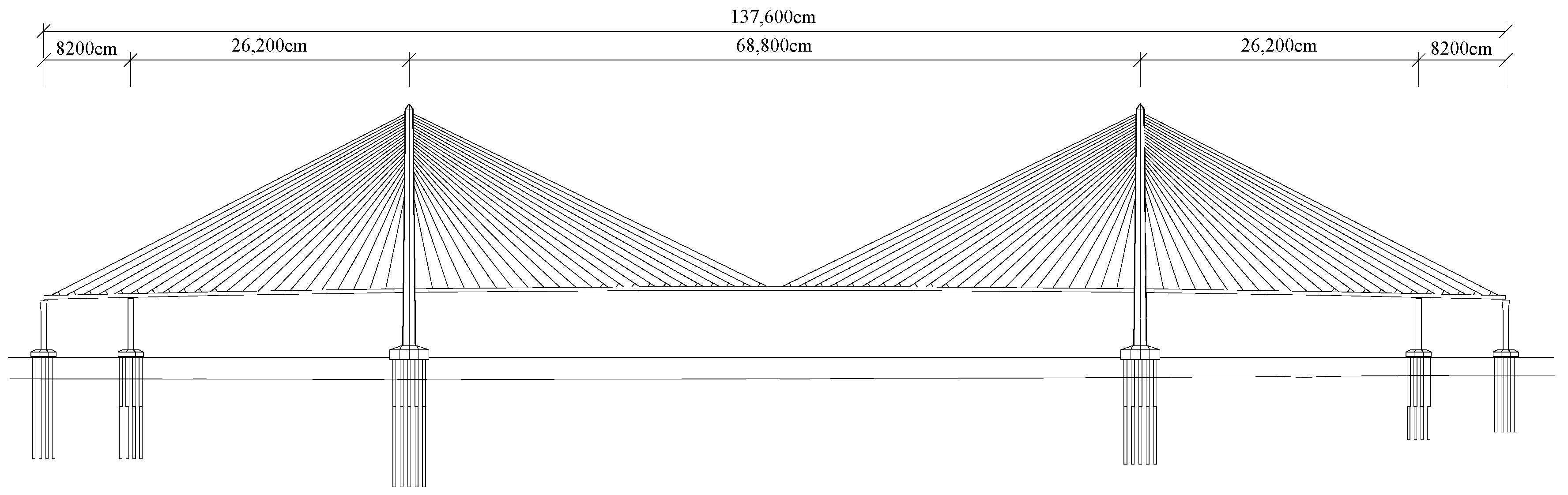
4.1. The Project Overview
4.2. The Establishment and Analysis of the Nonlinear Stress-Free-State forward Model
4.3. Calculation Results
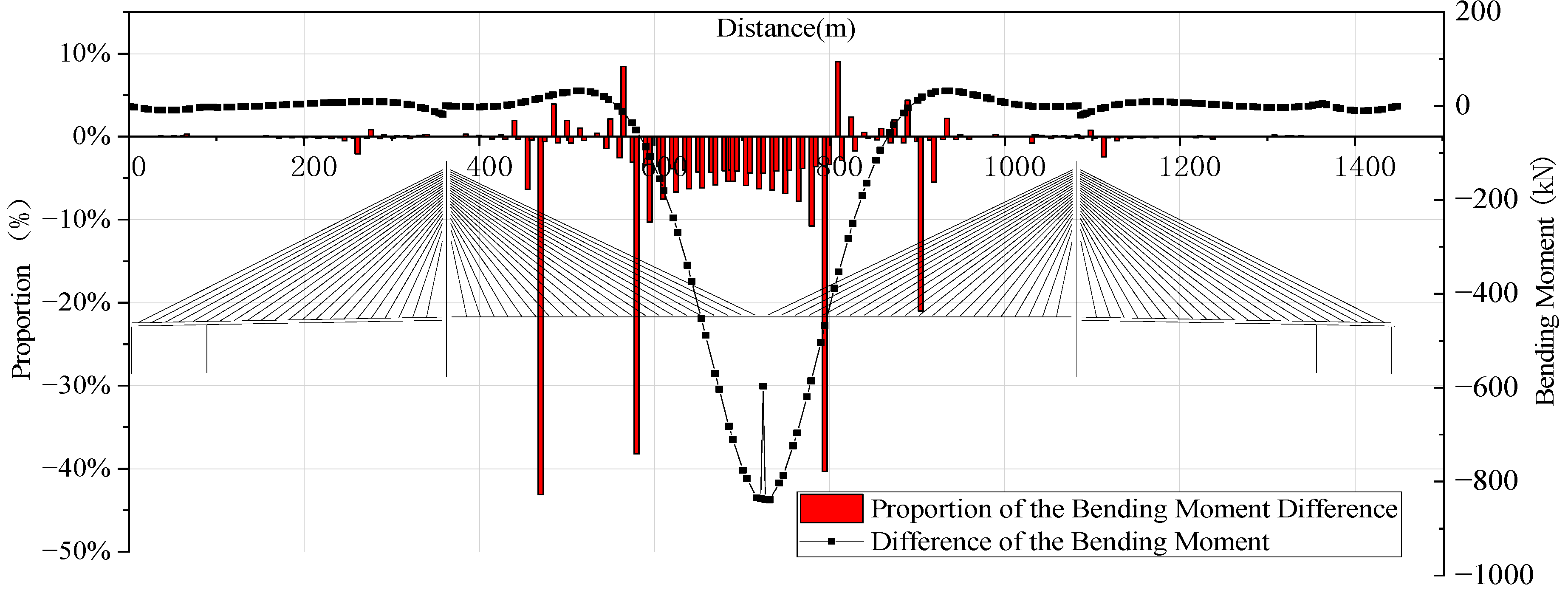
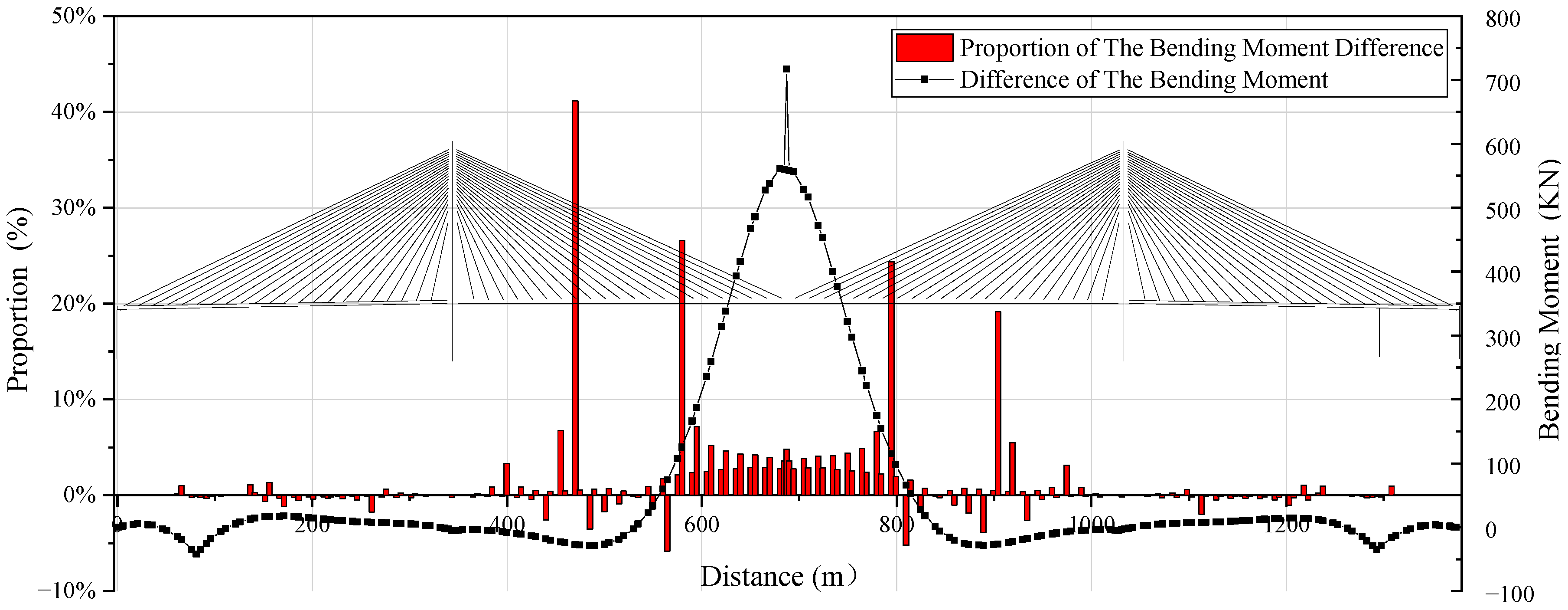
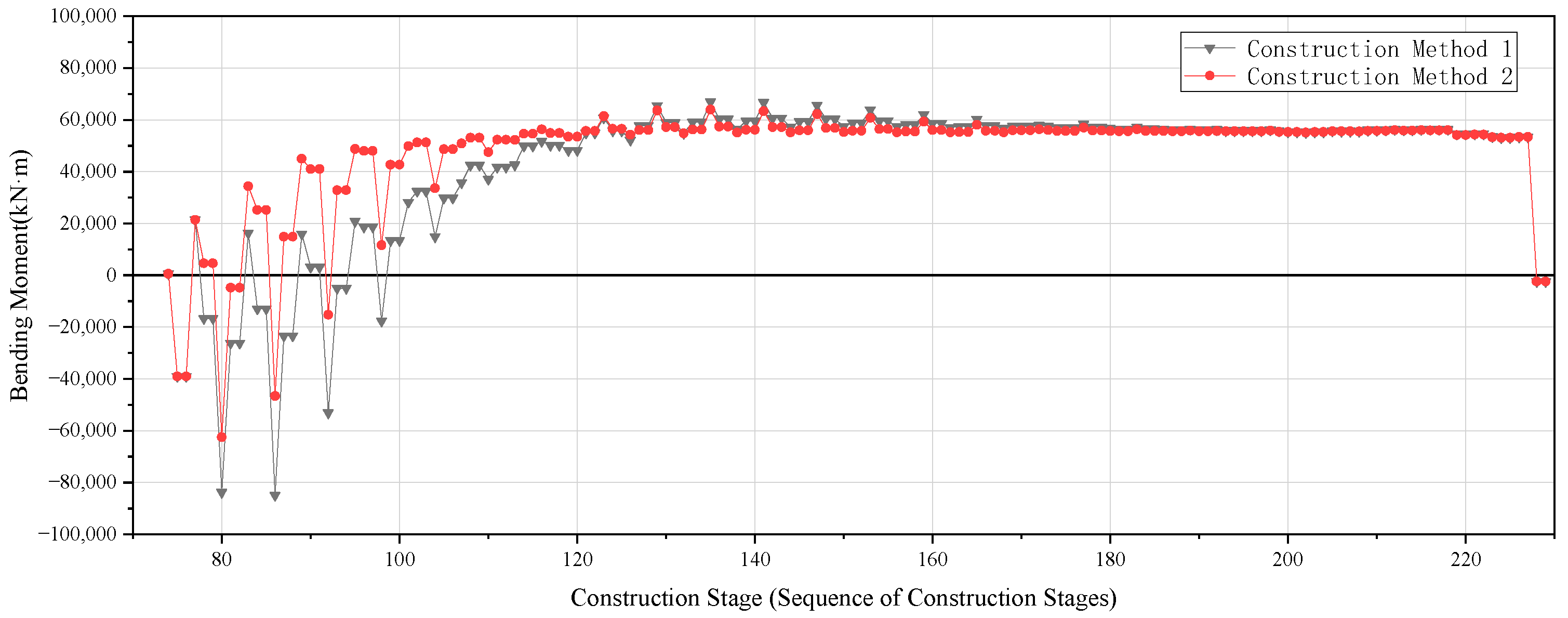
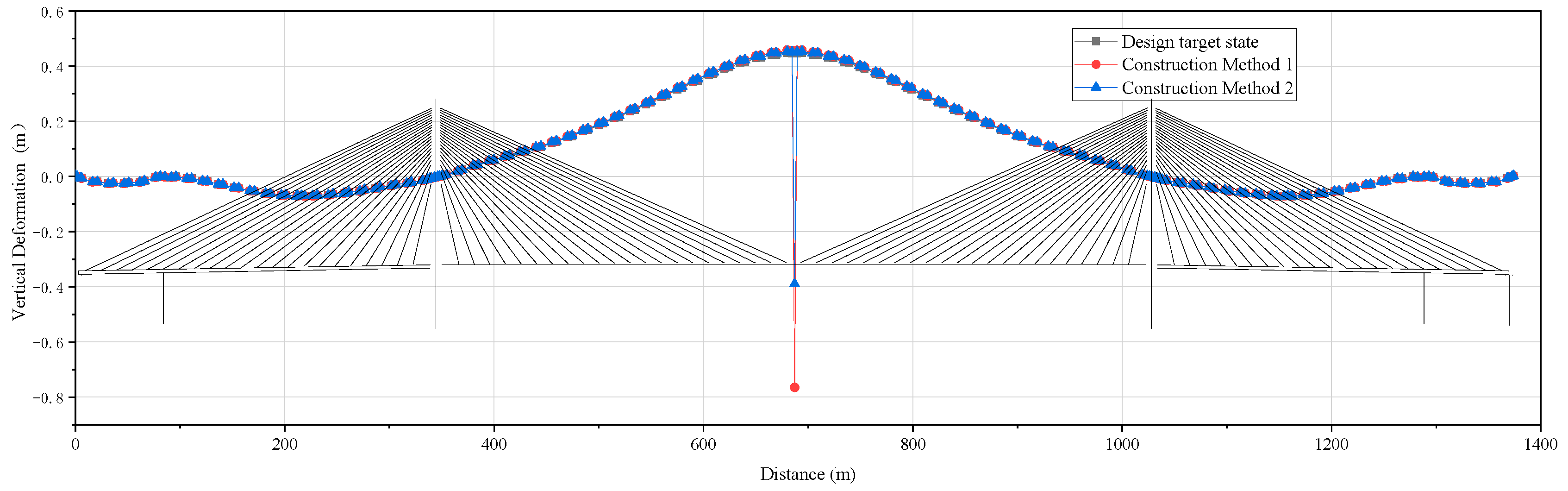
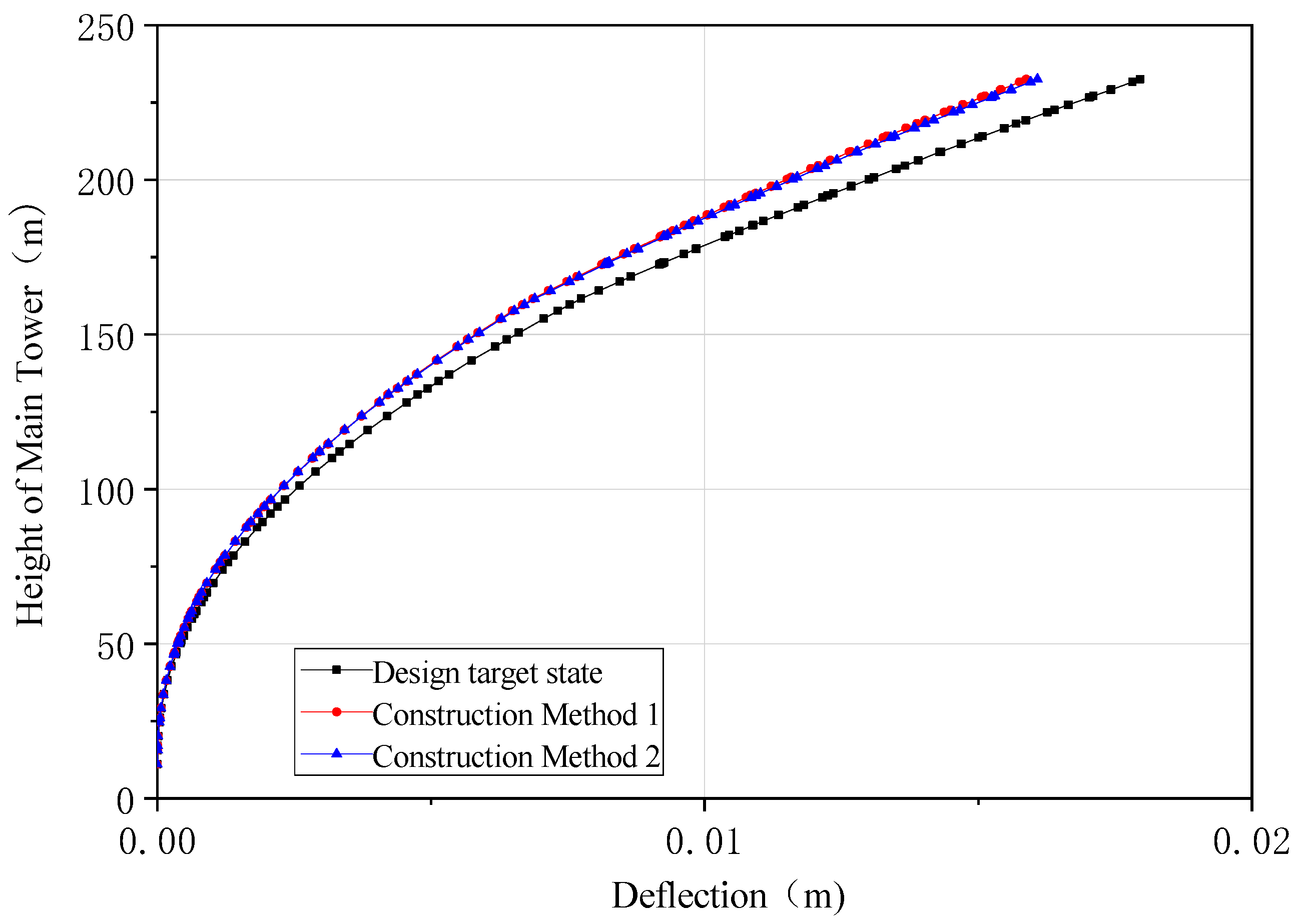
4.3.1. Internal Force and Deformation Calculation Results of the Main Beam
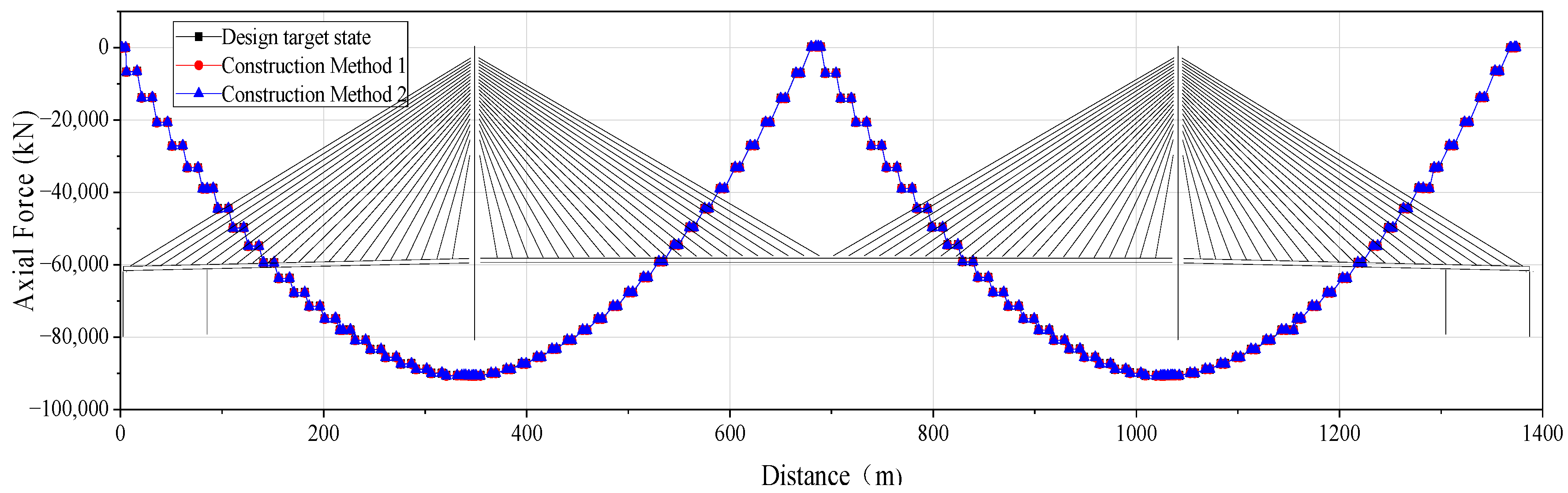
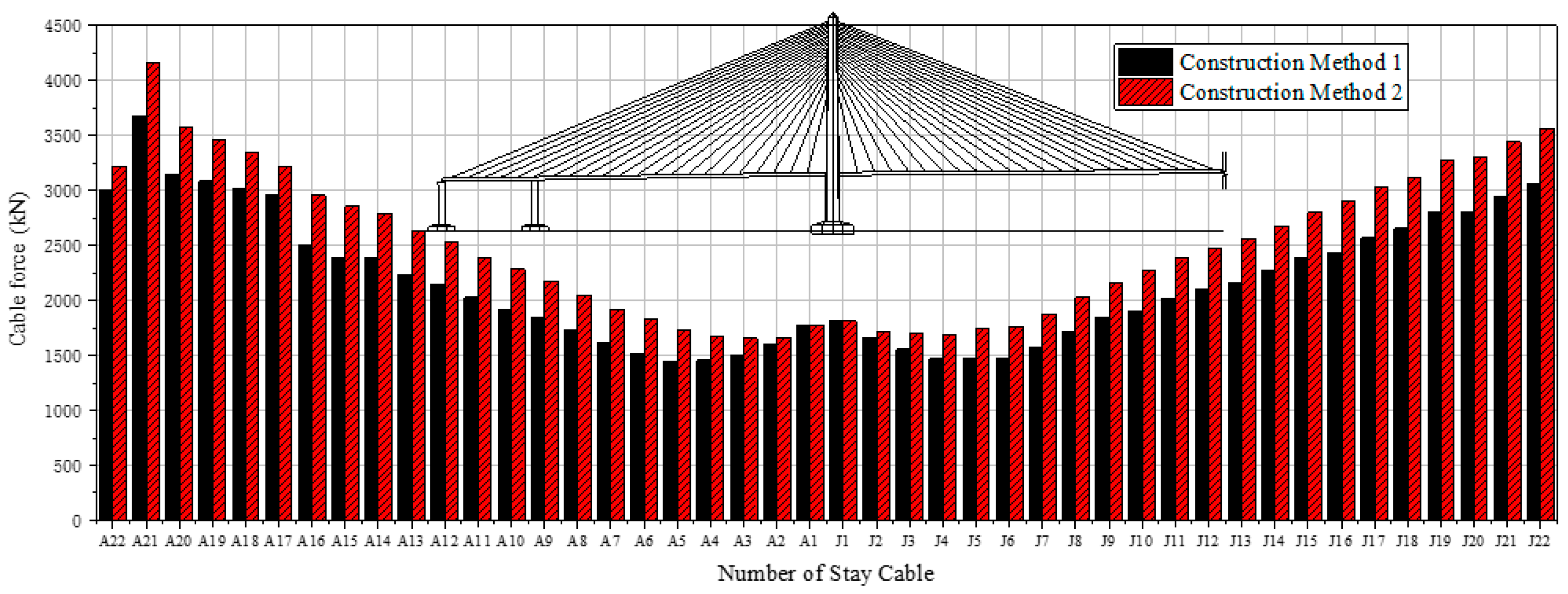
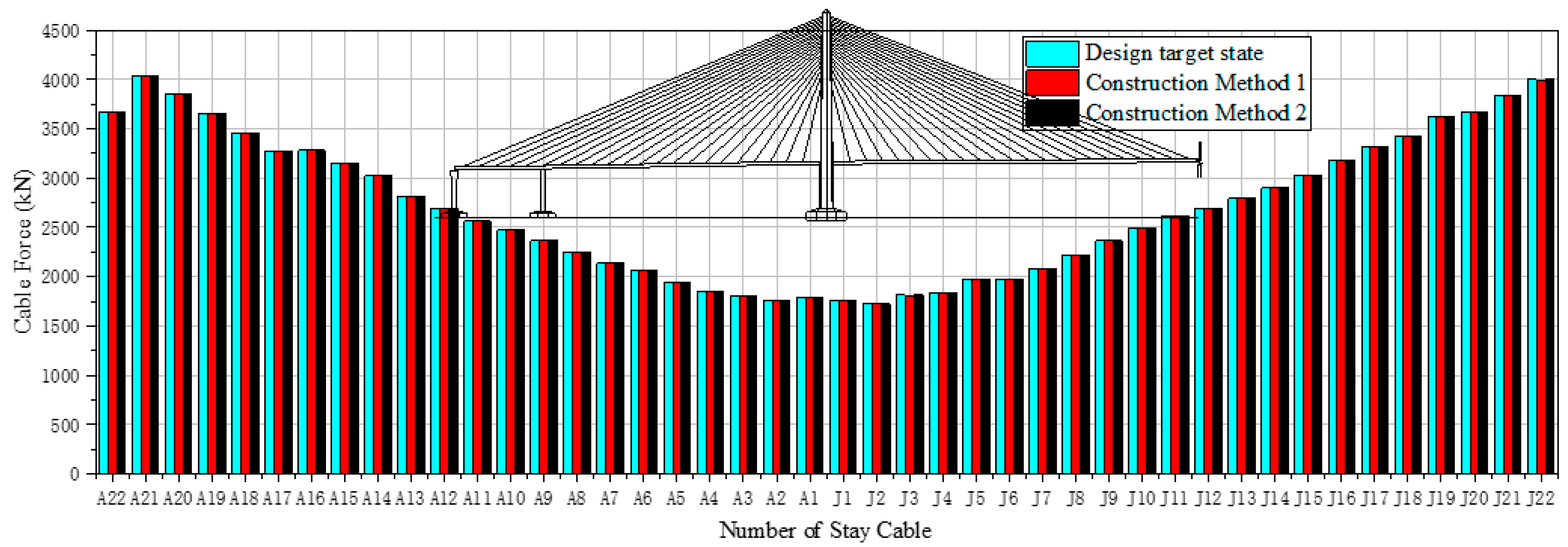
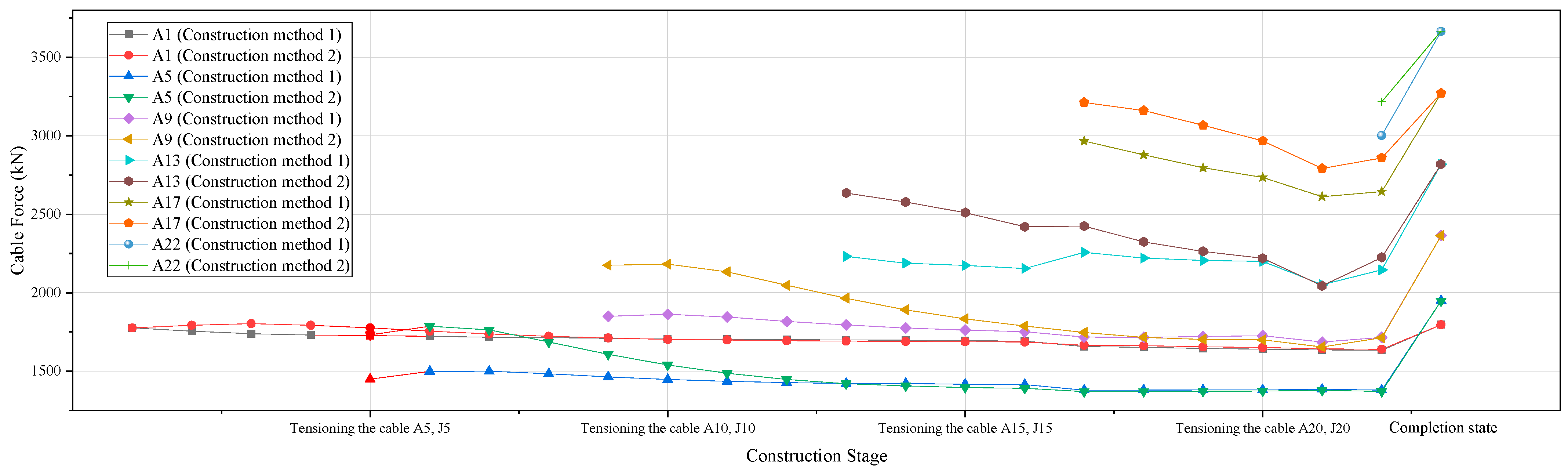
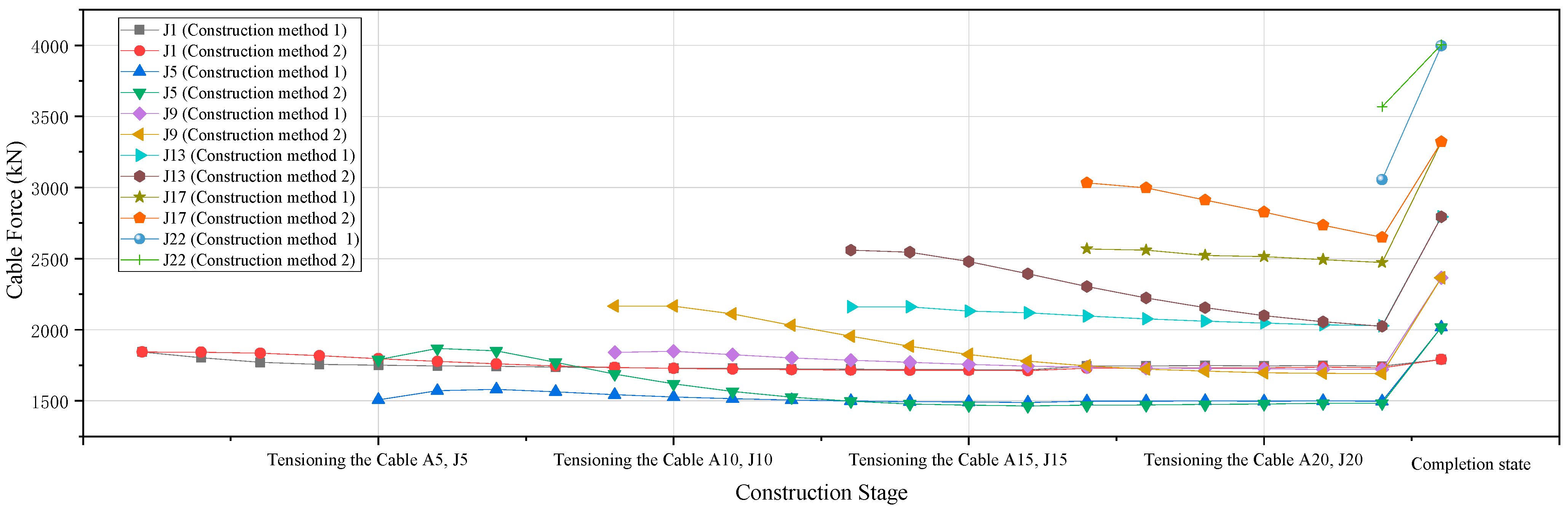
4.3.2. The Force Results of Stay Cables
5. Conclusions
- (1)
- According to the minimum potential energy theorem, the geometrical nonlinear mechanics equilibrium equation of a staged-construction bar system structure was obtained. The equation reflects the influence of the change in the stress-free-state variables on the completion state of the structure. It can be seen that, in the case of the same structural system, external loads, and boundary conditions, the determinant of the completion state of the different construction methods was the stress-free-state variables of the structural elements.
- (2)
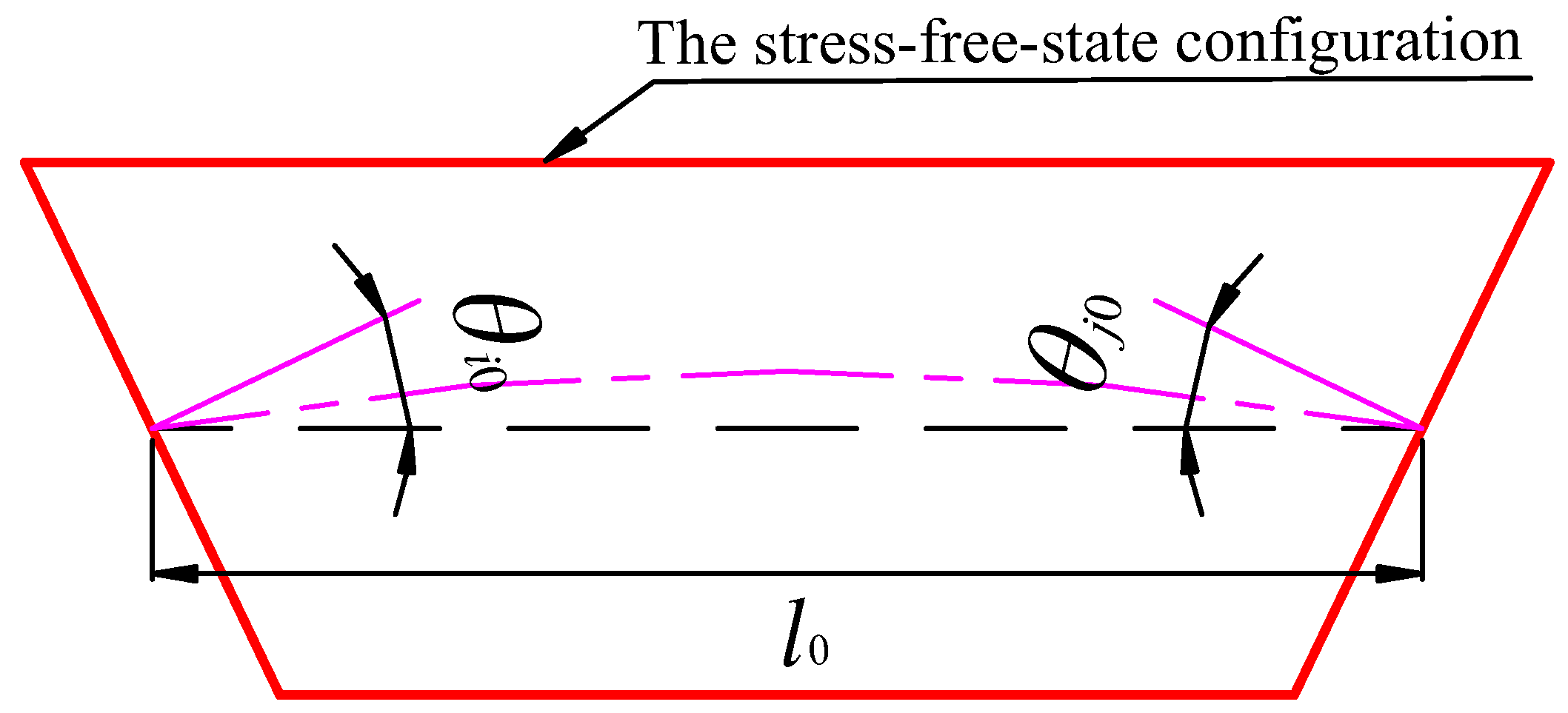
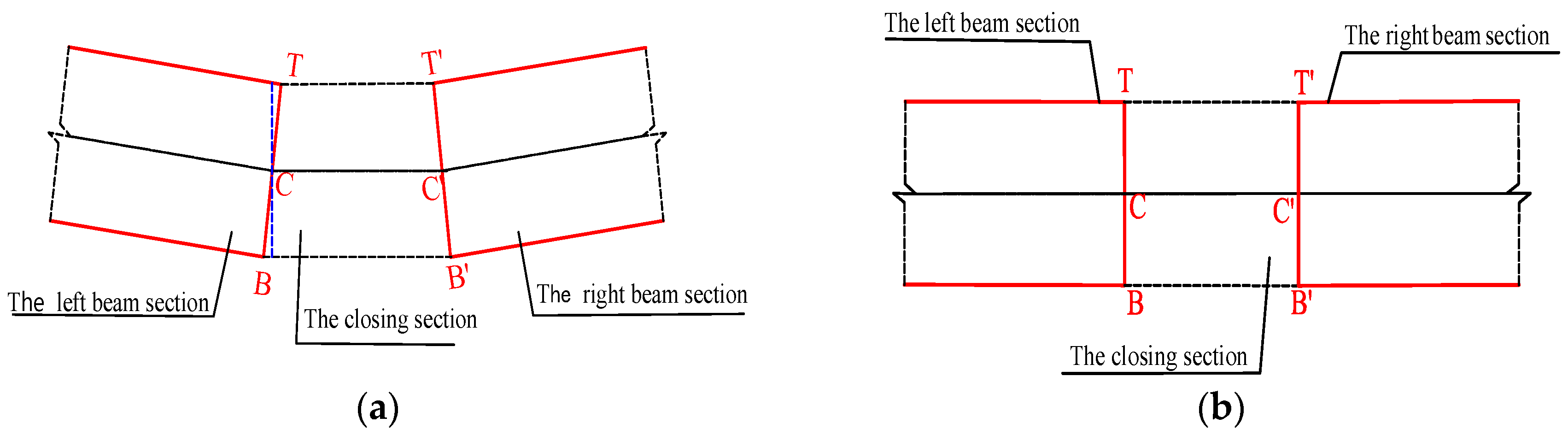
- The geometrical nonlinear equilibrium mechanics equation of the staged-construction planar beam structure was obtained. The specific expressions of the additional stress stiffness matrix and the generalized load array in the equation have been given. From the analysis of the equation, it can be seen that for the planar beam structure, when the structural system, external loads, boundary conditions, and stress-free-state variables were determined, the internal force and deformation were unique in the completion state and had nothing to do with the construction process experienced. For the staged-construction planar beam structure with a closing section, the stress-free-state installation condition of closing section was obtained from the analysis of the geometrical condition that the equilibrium equation holds.
- (3)
- Combined with the construction characteristics of cable-stayed bridges, according to the mechanical equilibrium equation of the staged-construction bar system, a new simulation method of long-span cable-stayed bridge construction is proposed. This is called stress-free-state forward analysis. Considering the influence of the geometric nonlinearity of the long-span cable-stayed bridge, this method can directly obtain the intermediate process state of the cable-stayed bridge construction without performing stage-by-stage demolition calculations. With this method, only one forward calculation is required for the internal force and deformation of the final structural state to reach the design target state.
- (4)
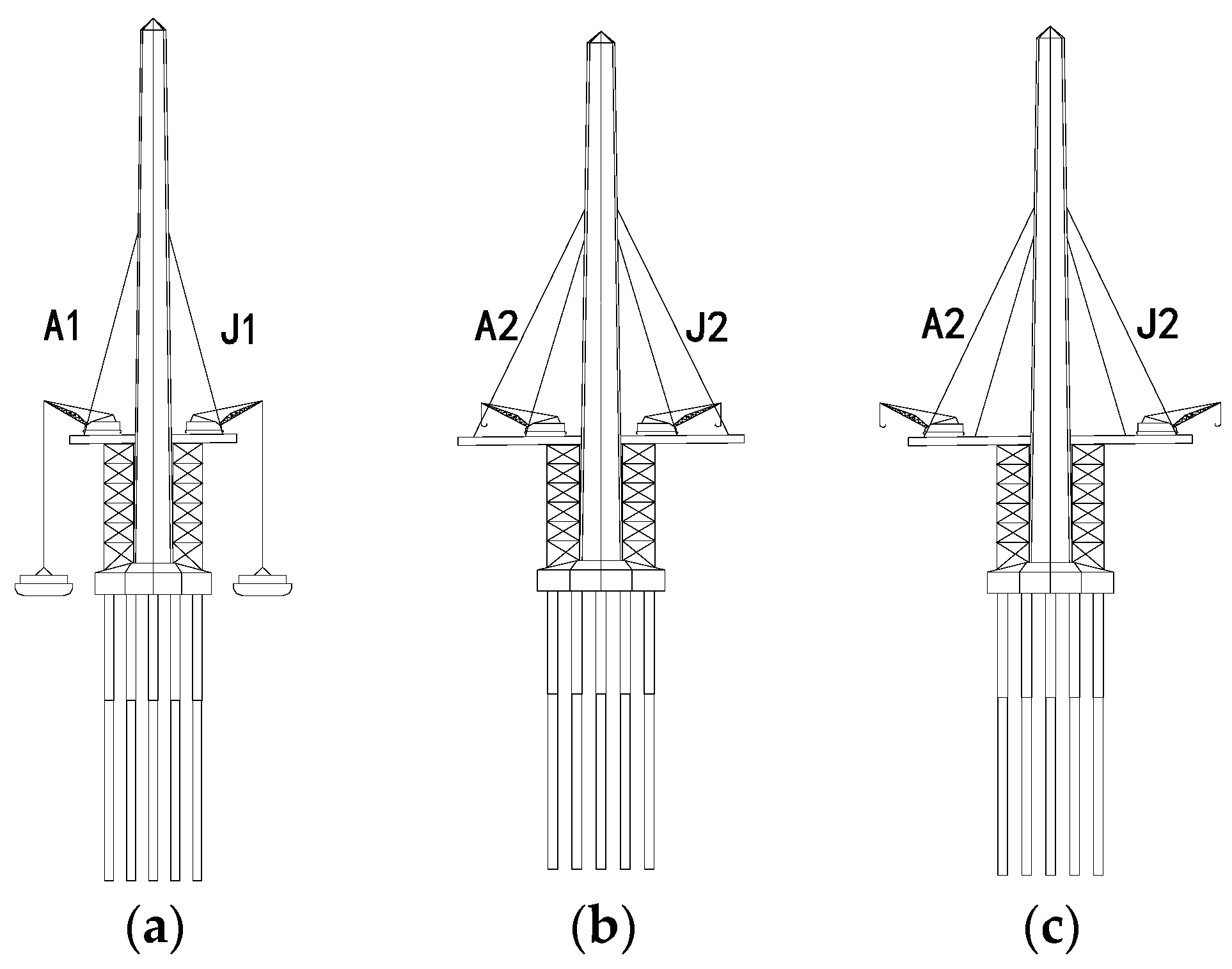
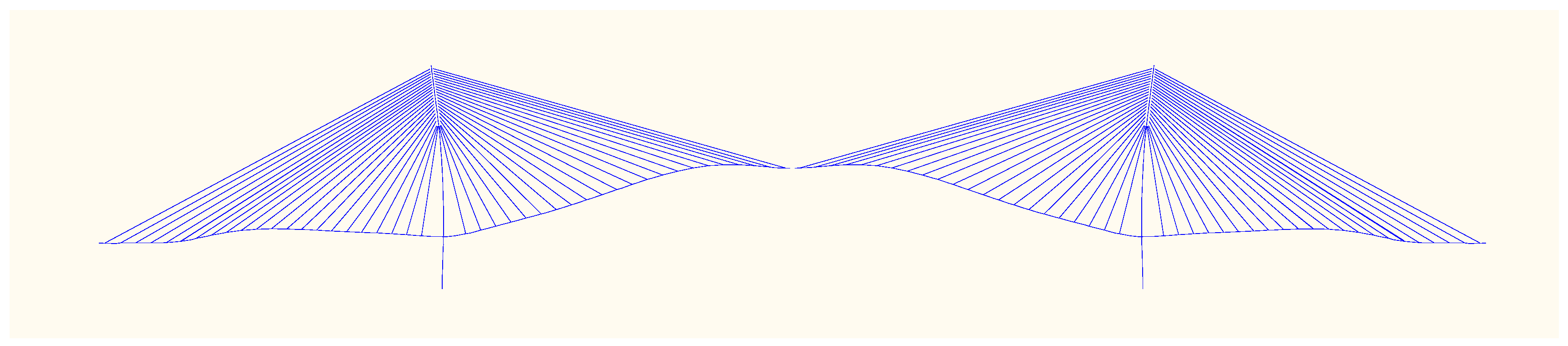
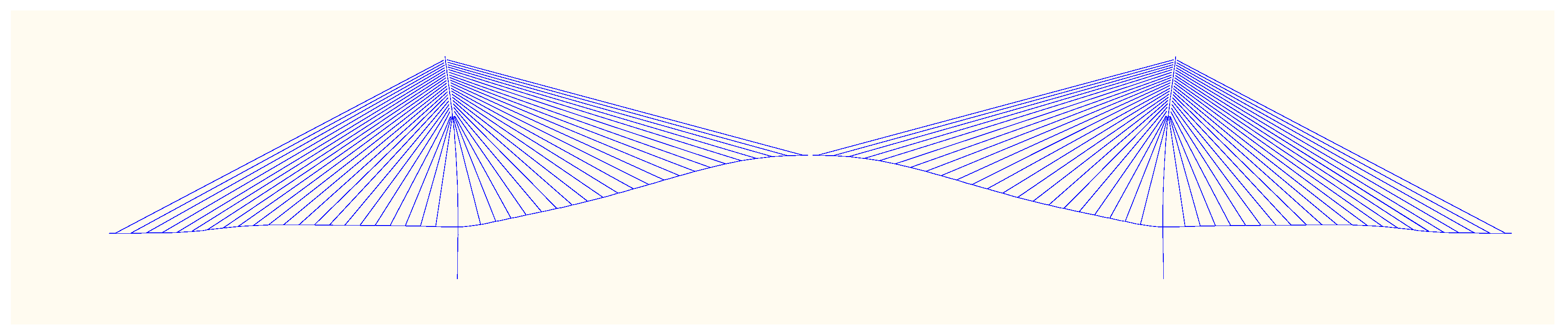
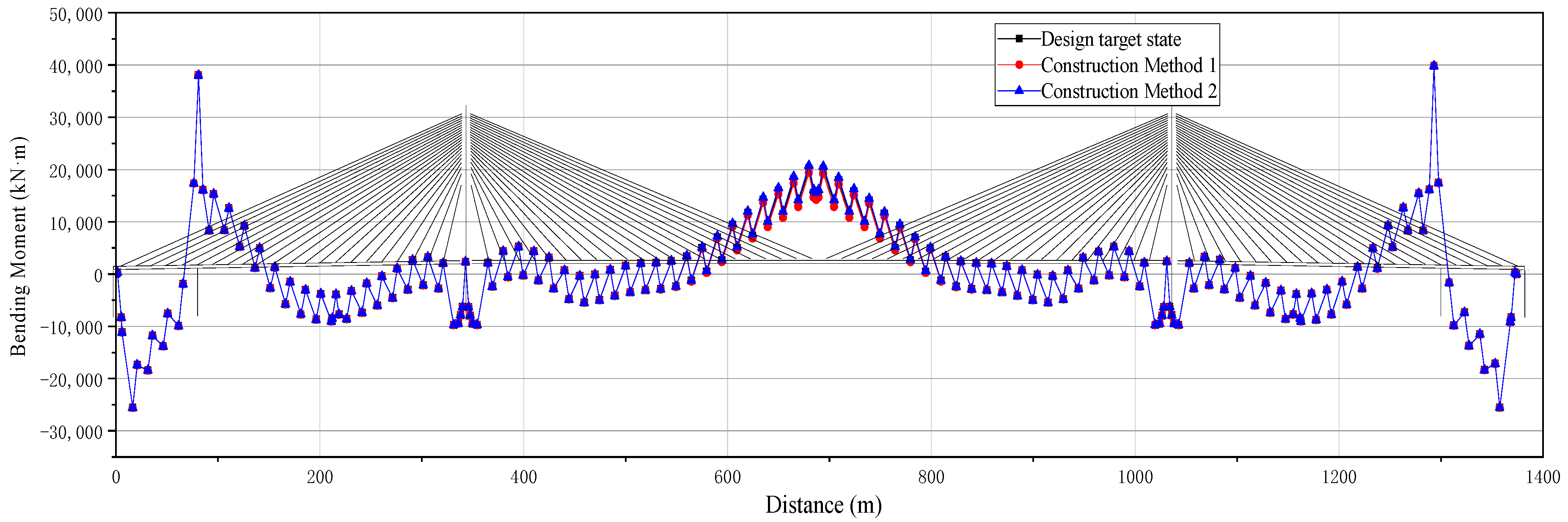
- Taking the cable-stayed bridge with the main span of 688 m as an example, considering the geometric nonlinearity, the construction process of the two different construction methods of the bridge was calculated using the stress-free-state forward analysis method. The calculation results showed that although the cable force in each construction stage of the two construction methods was different, the change trend was approximately the same, and the cable force in the completion stage converged to the design target state. The calculation results of the internal force and deformation of the main beam in the completion state were slightly different from the design target state. The results verify the reliability of the stress-free-state forward analysis method used in the simulation analysis of the construction stage of long-span cable-stayed bridges. At the same time, the geometric nonlinear equilibrium equation mechanics equations of the staged-construction bar system structure proposed in this paper were also verified by the example. This study provides a theoretical basis and reference for the popularization and application of the stress-free-state forward analysis method for cable-stayed bridges.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, K.; Xu, Y.L.; Lu, X.; Guan, Z.; Li, J. Digital twin-based collapse fragility assessment of a long-span cable-stayed bridge under strong earthquakes. Autom. Constr. 2021, 123, 103547. [Google Scholar] [CrossRef]
- Sampaio, A.Z.; Martins, O.P. The application of virtual reality technology in the construction of bridge: The cantilever and incremental launching methods. Autom. Constr. 2014, 37, 58–67. [Google Scholar] [CrossRef]
- Yao, Y.; Yan, M.; Bao, Y. Measurement of cable forces for automated monitoring of engineering structures using fiber optic sensors: A review. Autom. Constr. 2021, 126, 103687. [Google Scholar] [CrossRef]
- Lee, Y.-C.; Shariatfar, M.; Rashidi, A.; Lee, H.W. Evidence-driven sound detection for prenotification and identification of construction safety hazards and accidents. Autom. Constr. 2020, 113, 103127. [Google Scholar] [CrossRef]
- Crespi, P.; Zucca, M.; Valente, M.; Longarini, N. Influence of corrosion effects on the seismic capacity of existing RC bridges. Eng. Fail. Anal. 2022, 140, 106546. [Google Scholar] [CrossRef]
- Innocenzi, R.D.; Nicoletti, V.; Arezzo, D.; Carbonari, S.; Gara, F.; Dezi, L. A Good Practice for the Proof Testing of Cable-Stayed Bridges. Appl. Sci. 2022, 12, 3547. [Google Scholar] [CrossRef]
- Nicoletti, V.; Martini, R.; Carbonari, S.; Gara, F. Operational Modal Analysis as a Support for the Development of Digital Twin Models of Bridges. Infrastructures 2023, 8, 24. [Google Scholar] [CrossRef]
- Hou, S.; Dong, B.; Wang, H.; Wu, G. Inspection of surface defects on stay cables using a robot and transfer learning. Autom. Constr. 2020, 119, 103382. [Google Scholar] [CrossRef]
- Kim, D.; Kwak, Y.; Sohn, H. Accelerated cable-stayed bridge construction using terrestrial laser scanning. Autom. Constr. 2020, 117, 103269. [Google Scholar] [CrossRef]
- Abu Dabous, S.; Feroz, S. Condition monitoring of bridges with non-contact testing technologies. Autom. Constr. 2020, 116, 103224. [Google Scholar] [CrossRef]
- Wang, X.; Wang, H.; Sun, Y.; Mao, X.; Tang, S. Process-independent construction stage analysis of self-anchored suspension bridges. Autom. Constr. 2020, 117, 103227. [Google Scholar] [CrossRef]
- Li, T.; Liu, Z. An improved continuum model for determining the behavior of suspension bridges during construction. Autom. Constr. 2021, 127, 103715. [Google Scholar] [CrossRef]
- Wu, C.; Wu, P.; Wang, J.; Jiang, R.; Chen, M.; Wang, X. Ontological knowledge base for concrete bridge rehabilitation project management. Autom. Constr. 2021, 121, 103428. [Google Scholar] [CrossRef]
- Kim, H.-J.; Won, D.H.; Kang, Y.-J.; Kim, S. Structural stability of cable-stayed bridges during construction. Int. J. Steel Struct. 2017, 17, 443–469. [Google Scholar] [CrossRef]
- Jin, S.-S.; Jeong, S.; Sim, S.-H.; Seo, D.-W.; Park, Y.-S. Fully automated peak-picking method for an autonomous stay-cable monitoring system in cable-stayed bridges. Autom. Constr. 2021, 126, 103628. [Google Scholar] [CrossRef]
- Walther, R. Cable Stayed Bridges, 2nd ed.; Thomas Telford: London, UK, 1999. [Google Scholar]
- Oh, B.K.; Park, H.S.; Glisic, B. Prediction of long-term strain in concrete structure using convolutional neural networks, air temperature and time stamp of measurements. Autom. Constr. 2021, 126, 103665. [Google Scholar] [CrossRef]
- Qin, S.; Wei, K.; Qin, J.; Yuan, R.; Xu, L.; Dan, Q. Stress-free-state based structural analysis and construction control theory for staged construction bridges. Adv. Bridge Eng. 2020, 1, 1. [Google Scholar] [CrossRef]
- Wang, H.; Tang, T.; Zheng, H. Analysis of cable-stayed bridges during construction by cantilever method. Comput. Struct. 2004, 82, 329–346. [Google Scholar] [CrossRef]
- Pipinato, A.; Pellegrino, C.; Modena, C. Structural analysis of the cantilever construction process in cable-stayed bridges. Period. Polytech. Civ. Eng. 2012, 56, 141–166. [Google Scholar] [CrossRef] [Green Version]
- Behin, Z. Erection Analysis of Cable-Stayed Bridges. PhD Thesis, Department of Civil Engineering, University of Alberta, Edmonton, AB, Canada, 1990. [Google Scholar]
- Behin, Z.; Murray, D. A substructure-frontal technique for cantilever erection analysis of cable-stayed bridges. Comput. Struct. 1992, 42, 145–157. [Google Scholar] [CrossRef]
- Reddy, P.; Ghaboussi, J.; Hawkins, M. Simulation of construction of cable.Stayed bridges. J. Bridge Eng. 1999, 4, 249–257. [Google Scholar] [CrossRef]
- Farre-Checa, J. Simulation of Cantilever Construction of Cable-Stayed Bridges Taking into Account Time Dependent Phenomena. Master’s Thesis, KTH, School of Architecture and the Built Environment (ABE), Stockholm, Sweden, 2017. [Google Scholar]
- Wang, X.; Frangopol, D.M.; Dong, Y.; Lei, X.; Zhang, Y. Novel technique for configuration transformation of 3D curved cables of suspension bridges: Application to the Dongtiao River Bridge. J. Perform. Constr. Facil. 2018, 32, 04018045. [Google Scholar] [CrossRef]
- Lozano-Galant, J.; Paya-Zaforteza, I.; Xu, D.; Turmo, J. Direct simulation of the tensioning process of cable-stayed bridges. Comput. Struct. 2013, 121, 64–75. [Google Scholar] [CrossRef]
- Qin, S. Unstressed state control method for bridges constructed in stages. Bridge Construct. 2008, 1, 8–14. [Google Scholar]
- Qin, S. Application of unstressed state control method to calculation for erection of cable-stayed bridge. Bridge Construct. 2008, 2, 13–16. [Google Scholar]
- Zhang, H.H.; Sun, N.N.; Wang, P.Z.; Liu, M.H.; Li, Y. Optimization of Cable Force Adjustment in Cable-Stayed Bridge considering the Number of Stay Cable Adjustment. Adv. Civ. Eng. 2020, 2020, 4527309. [Google Scholar] [CrossRef]
- Sharry, T.; Guan, H.; Nguyen, A.; Oh, E.; Hoang, N. Latest advances in finite element modelling and model updating of cable-stayed bridges. Infrastructures 2022, 7, 8. [Google Scholar] [CrossRef]
- Farré-Checa, J.; Komarizadehasl, S.; Ma, H.; Lozano-Galant, J.; Turmo, J. Direct simulation of the tensioning process of cable-stayed bridge cantilever construction. Autom. Constr. 2022, 137, 104197. [Google Scholar] [CrossRef]
- Morán, A.; Oñate, E.; Miquel, J. A general procedure for deriving symmetric expressions for the secant and tangent stiffness matrices in finite element analysis. Int. J. Numer. Methods Eng. 1998, 42, 219–236. [Google Scholar] [CrossRef]
- Jian, L.; Yun, T.; Yumei, L. Stiffness matrix of nonlinear FEM equilibrium equation. Procedia Eng. 2012, 29, 3698–3702. [Google Scholar] [CrossRef] [Green Version]
- Greco, L.; Scrofani, A.; Cuomo, M. A non-linear symmetric G1-conforming Bézier finite element formulation for the analysis of Kirchhoff beam assemblies. Comput. Methods Appl. Mech. Eng. 2021, 387, 114176. [Google Scholar] [CrossRef]
- Schulz, M.; Böl, M. A finite element formulation for a geometrically exact Kirchhoff–Love beam based on constrained translation. Comput. Mech. 2019, 64, 1155–1175. [Google Scholar] [CrossRef]
- Greco, L.; Cuomo, M.; Castello, D.; Scrofani, A. An updated Lagrangian Bézier finite element formulation for the analysis of slender beams. Math. Mech. Solids 2022, 27, 2110–2138. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Crane Weight | Front Axle Weight (kN) | Rear Axle Weight (kN) | |
|---|---|---|---|
| The Construction Method | |||
| Construction method 1 | 948.6 | 51 | |
| Construction method 2 | 1948.6 | 1051 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, S.; Gong, W.; Wu, X.; Zhang, Z. Nonlinear Stress-Free-State Forward Analysis Method of Long-Span Cable-Stayed Bridges Constructed in Stages. Buildings 2023, 13, 1735. https://doi.org/10.3390/buildings13071735
Wei S, Gong W, Wu X, Zhang Z. Nonlinear Stress-Free-State Forward Analysis Method of Long-Span Cable-Stayed Bridges Constructed in Stages. Buildings. 2023; 13(7):1735. https://doi.org/10.3390/buildings13071735
Chicago/Turabian StyleWei, Shaoyang, Wenfeng Gong, Xiaoguang Wu, and Zhaohui Zhang. 2023. "Nonlinear Stress-Free-State Forward Analysis Method of Long-Span Cable-Stayed Bridges Constructed in Stages" Buildings 13, no. 7: 1735. https://doi.org/10.3390/buildings13071735