
Bridge Damage Detection Using Complexity Pursuit and Extreme Value Theory

Abstract
:1. Introduction
2. Theoretical Basis
2.1. Data Preprocessing
2.2. Using the CP Algorithm to Extract Sources of Structural Damage
2.3. Establishment of DI Based on Clustering Idea
2.4. Establishing Damage Detection Thresholds Based on EVT
3. The Implementation Process of the Proposed Method
3.1. Offline Learning Stage
3.2. Online Damage Stage
4. Application on KW51 Railway Bridge
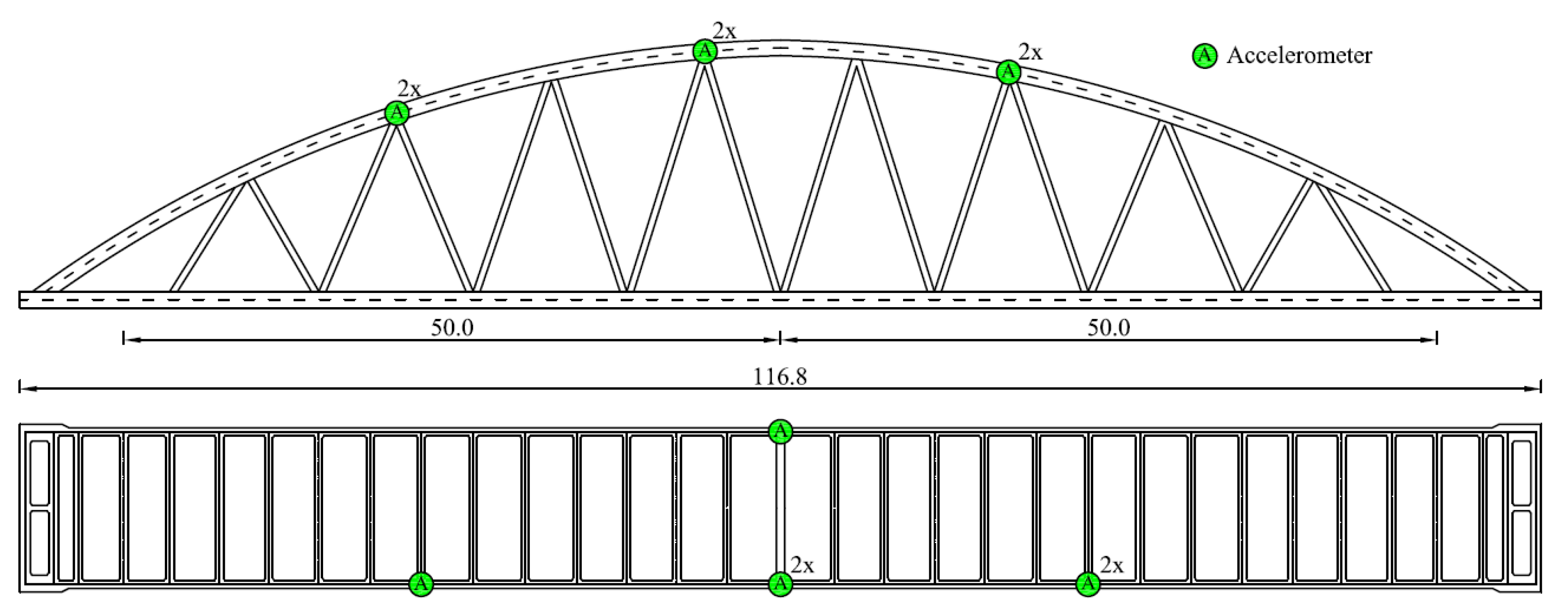
4.1. Bridge Description
4.2. Damage Detection
4.3. Comparisons
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kaewunruen, S.; Sresakoolchai, J.; Ma, W.; Phil-Ebosie, O. Digital twin aided vulnerability assessment and risk-based maintenance planning of bridge infrastructures exposed to extreme conditions. Sustainability 2021, 13, 2051. [Google Scholar]
- Alokita, S.; Rahul, V.; Jayakrishna, K.; Kar, V.; Rajesh, M.; Thirumalini, S.; Manikandan, M. Recent advances and trends in structural health monitoring. In Structural Health Monitoring of Biocomposites, Fibre-Reinforced Composites and Hybrid Composites; Woodhead Publishing: London, UK, 2019; pp. 53–73. [Google Scholar]
- Daneshvar, M.H.; Sarmadi, H. Unsupervised learning-based damage assessment of full-scale civil structures under long-term and short-term monitoring. Eng. Struct. 2022, 256, 18. [Google Scholar] [CrossRef]
- Zheng, H.; Duan, Z.D. Structural damage alert with consideration of the nonlinear environmental effects. J. Vib. Eng. 2022, 34, 1101–1111. [Google Scholar]
- Sohn, H. Effects of environmental and operational variability on structural health monitoring. Philos. Trans. R. Soc. A-Math. Phys. Eng. Sci. 2007, 365, 539–560. [Google Scholar] [CrossRef]
- Fallahian, M.; Khoshnoudian, F.; Meruane, V. Ensemble classification method for structural damage assessment under varying temperature. Struct. Health Monit. 2018, 17, 747–762. [Google Scholar] [CrossRef]
- Maes, K.; Van Meerbeeck, L.; Reynders, E.P.B.; Lombaert, G. Validation of vibration-based structural health monitoring on retrofitted railway bridge KW51. Mech. Syst. Signal Process. 2022, 165, 24. [Google Scholar] [CrossRef]
- Mousavi, M.; Gandomi, A.H. Structural health monitoring under environmental and operational variations using MCD prediction error. J. Sound Vib. 2021, 512, 20. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. One-year monitoring of the Z24-Bridge: Environmental effects versus damage events. Earthq. Eng. Struct. Dyn. 2001, 30, 149–171. [Google Scholar] [CrossRef]
- Zhou, H.F.; Ni, Y.Q.; Ko, J.M. Eliminating Temperature Effect in Vibration-Based Structural Damage Detection. J. Eng. Mech. 2011, 137, 785–796. [Google Scholar] [CrossRef]
- Ni, Y.; Hua, X.; Fan, K.; Ko, J. Correlating modal properties with temperature using long-term monitoring data and support vector machine technique. Eng. Struct. 2005, 27, 1762–1773. [Google Scholar] [CrossRef]
- Yang, D.; Youliang, D.; Aiqun, L. Structural condition assessment of long-span suspension bridges using long-term monitoring data. Earthq. Eng. Eng. Vib. 2010, 9, 123–131. [Google Scholar] [CrossRef]
- Wah, W.S.L.; Chen, Y.T.; Roberts, G.W.; Elamin, A. Separating damage from environmental effects affecting civil structures for near real-time damage detection. Struct. Health Monit. 2018, 17, 850–868. [Google Scholar] [CrossRef]
- Diao, Y.S.; Sui, Z.Z.; Guo, K.Z. Structural damage identification under variable environmental/operational conditions based on singular spectrum analysis and statistical control chart. Struct. Control Health Monit. 2021, 28, 19. [Google Scholar] [CrossRef]
- Xu, M.Q.; Wu, W.K.; Li, J.; Au, F.T.K.; Wang, S.Q.; Hao, H.; Yang, N. Structural damage detection using low-rank matrix approximation and cointegration analysis. Eng. Struct. 2022, 267, 13. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, D.H.; Yi, T.H.; Zhang, G.H.; Han, J.G. Eliminating environmental and operational effects on structural modal frequency: A comprehensive review. Struct. Control Health Monit. 2022, 29, e3073. [Google Scholar] [CrossRef]
- Wang, X.; Li, L.; Beck, J.L.; Xia, Y. Sparse Bayesian factor analysis for structural damage detection under unknown environmental conditions. Mech. Syst. Signal Process. 2021, 154, 107563. [Google Scholar] [CrossRef]
- Wang, Z.; Yi, T.-H.; Yang, D.-H.; Li, H.-N.; Zhang, G.-H.; Han, J.-G. Early anomaly warning of environment-induced bridge modal variability through localized principal component differences. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2022, 8, 04022044. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Gul, M.; Kostic, B. Eliminating Temperature Effects in Damage Detection for Civil Infrastructure Using Time Series Analysis and Autoassociative Neural Networks. J. Aerosp. Eng. 2019, 32, 16. [Google Scholar] [CrossRef]
- Yan, A.M.; Kerschen, G.; De Boe, P.; Golinval, J.C. Structural damage diagnosis under varying environmental conditions—Part I: A linear analysis. Mech. Syst. Signal Process. 2005, 19, 847–864. [Google Scholar] [CrossRef]
- Yan, A.M.; Kerschen, G.; De Boe, P.; Golinval, J.C. Structural damage diagnosis under varying environmental conditions—Part II: Local PCA for non-linear cases. Mech. Syst. Signal Process. 2005, 19, 865–880. [Google Scholar] [CrossRef]
- Oh, C.K.; Sohn, H.; Bae, I.H. Statistical novelty detection within the Yeongjong suspension bridge under environmental and operational variations. Smart Mater. Struct. 2009, 18, 9. [Google Scholar] [CrossRef]
- Sohn, H.; Worden, K.; Farrar, C.R. Statistical damage classification under changing environmental and operational conditions. J. Intell. Mater. Syst. Struct. 2002, 13, 561–574. [Google Scholar] [CrossRef]
- Figueiredo, E.; Park, G.; Farrar, C.R.; Worden, K.; Figueiras, J. Machine learning algorithms for damage detection under operational and environmental variability. Struct. Health Monit. 2011, 10, 559–572. [Google Scholar] [CrossRef]
- Hsu, T.Y.; Loh, C.H. Damage detection accommodating nonlinear environmental effects by nonlinear principal component analysis. Struct. Control Health Monit. 2010, 17, 338–354. [Google Scholar] [CrossRef]
- Silva, M.; Santos, A.; Santos, R.; Figueiredo, E.; Sales, C.; Costa, J. Deep principal component analysis: An enhanced approach for structural damage identification. Struct. Health Monit. 2019, 18, 1444–1463. [Google Scholar] [CrossRef]
- Bell, A.J.; Sejnowski, T.J. An information-maximization approach to blind separation and blind deconvolution. Neural Comput. 1995, 7, 1129–1159. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Zhou, C.; Li, H. Damage identification method based on blind source identification. J. Earthq. Eng. Eng. Vib. 2013, 33, 158–163. [Google Scholar]
- Rainieri, C.; Magalhaes, F.; Gargaro, D.; Fabbrocino, G.; Cunha, A. Predicting the variability of natural frequencies and its causes by Second-Order Blind Identification. Struct. Health Monit. 2019, 18, 486–507. [Google Scholar] [CrossRef]
- Yang, Y.C.; Nagarajaiah, S. Blind modal identification of output-only structures in time-domain based on complexity pursuit. Earthq. Eng. Struct. Dyn. 2013, 42, 1885–1905. [Google Scholar] [CrossRef]
- Yang, Y.C.; Nagarajaiah, S. Structural damage identification via a combination of blind feature extraction and sparse representation classification. Mech. Syst. Signal Process. 2014, 45, 1–23. [Google Scholar] [CrossRef]
- Yang, Y.C.; Nagarajaiah, S. Output-only modal identification by compressed sensing: Non-uniform low-rate random sampling. Mech. Syst. Signal Process. 2015, 56–57, 15–34. [Google Scholar] [CrossRef]
- Jana, D.; Nagarajaiah, S.; Yang, Y.C. Computer vision-based real-time cable tension estimation algorithm using complexity pursuit from video and its application in Fred-Hartman cable-stayed bridge. Struct. Control Health Monit. 2022, 29, 21. [Google Scholar] [CrossRef]
- Sohn, H.; Allen, D.W.; Worden, K.; Farrar, C.R. Structural damage classification using extreme value statistics. J. Dyn. Sys., Meas., Control 2005, 127, 125–132. [Google Scholar] [CrossRef]
- Rebillat, M.; Hmad, O.; Kadri, F.; Mechbal, N. Peaks Over Threshold–based detector design for structural health monitoring: Application to aerospace structures. Struct. Health Monit. 2018, 17, 91–107. [Google Scholar] [CrossRef]
- Sarmadi, H.; Yuen, K.-V. Structural health monitoring by a novel probabilistic machine learning method based on extreme value theory and mixture quantile modeling. Mech. Syst. Signal Process. 2022, 173, 109049. [Google Scholar] [CrossRef]
- Martucci, D.; Civera, M.; Surace, C. The extreme function theory for damage detection: An application to civil and aerospace structures. Appl. Sci. 2021, 11, 1716. [Google Scholar] [CrossRef]
- Martucci, D.; Civera, M.; Surace, C. Bridge monitoring: Application of the extreme function theory for damage detection on the I-40 case study. Eng. Struct. 2023, 279, 115573. [Google Scholar] [CrossRef]
- Gao, J.B.; Liu, F.Y.; Zhang, J.F.; Hu, J.; Cao, Y.H. Information Entropy As a Basic Building Block of Complexity Theory. Entropy 2013, 15, 3396–3418. [Google Scholar] [CrossRef]
- Fisher, R.A.; Tippett, L.H.C. Limiting forms of the frequency distribution of the largest or smallest member of a sample. Math. Proc. Camb. Philos. Soc. 1928, 24, 180–190. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, M.Z.; Deng, Y. Measure the structure similarity of nodes in complex networks based on relative entropy. Phys. A 2018, 491, 749–763. [Google Scholar] [CrossRef]
- Maes, K.; Lombaert, G. Monitoring Railway Bridge KW51 Before, During, and After Retrofitting. J. Bridge Eng. 2021, 26, 19. [Google Scholar] [CrossRef]
- Sarmadi, H.; Entezami, A.; Behkamal, B.; De Michele, C. Partially online damage detection using long-term modal data under severe environmental effects by unsupervised feature selection and local metric learning. J. Civ. Struct. Health Monit. 2022, 12, 1043–1066. [Google Scholar] [CrossRef]
- Turrisi, S.; Zappa, E.; Cigada, A. Combined Use of Cointegration Analysis and Robust Outlier Statistics to Improve Damage Detection in Real-World Structures. Sensors 2022, 22, 2177. [Google Scholar] [CrossRef]
- Sarmadi, H.; Entezami, A.; Salar, M.; De Michele, C. Bridge health monitoring in environmental variability by new clustering and threshold estimation methods. J. Civ. Struct. Health Monit. 2021, 11, 629–644. [Google Scholar] [CrossRef]
- Yang, Y.C.; Nagarajaiah, S. Output-only modal identification with limited sensors using sparse component analysis. J. Sound Vib. 2013, 332, 4741–4765. [Google Scholar] [CrossRef]
- Heravi, M.A.; Tavakkoli, S.M.; Entezami, A. Structural health monitoring by probability density function of autoregressive-based damage features and fast distance correlation method. J. Vib. Control 2021, 28, 2786–2802. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modal Frequency Combinations | Type I | Type II | Total |
|---|---|---|---|
| 6, 10, 12, 13 | 2 (0.07%) | 0 (0.00%) | 2 (0.06%) |
| 6, 10, 12 | 9 (0.33%) | 3 (0.68%) | 12 (0.38%) |
| 6, 10, 13 | 8 (0.30%) | 1 (0.23%) | 9 (0.29%) |
| 6, 12, 13 | 5 (0.19%) | 0 (0.00%) | 5 (0.16%) |
| 10, 12, 13 | 3 (0.11%) | 1 (0.23%) | 4 (0.13%) |
| 6, 10 | 7 (0.26%) | 50 (11.31%) | 57 (1.82%) |
| 6, 12 | 8 (0.30%) | 2 (0.45%) | 10 (0.32%) |
| 6, 13 | 7 (0.26%) | 1 (0.23%) | 8 (0.26%) |
| 10, 12 | 5 (0.19%) | 250 (56.56%) | 255 (8.15%) |
| 10, 13 | 4 (0.15%) | 3 (0.68%) | 7 (0.22%) |
| 12, 13 | 5 (0.19%) | 141 (31.90%) | 146 (4.66%) |
| Method | Type I | Type II | Total |
|---|---|---|---|
| PCA | 63 (2.34%) | 2 (0.47%) | 65 (2.04%) |
| AANN | 67 (2.49%) | 7 (1.58%) | 74 (2.36%) |
| The method proposed in this paper | 2 (0.07%) | 0 (0.00%) | 2 (0.06%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zhuo, W.; Yang, J. Bridge Damage Detection Using Complexity Pursuit and Extreme Value Theory. Buildings 2023, 13, 2183. https://doi.org/10.3390/buildings13092183
Liu X, Zhuo W, Yang J. Bridge Damage Detection Using Complexity Pursuit and Extreme Value Theory. Buildings. 2023; 13(9):2183. https://doi.org/10.3390/buildings13092183
Chicago/Turabian StyleLiu, Xun, Weidong Zhuo, and Jie Yang. 2023. "Bridge Damage Detection Using Complexity Pursuit and Extreme Value Theory" Buildings 13, no. 9: 2183. https://doi.org/10.3390/buildings13092183