2.1. Basic Concept of EDR for Single Viscous Damper
A viscous damper is a kind of hydraulic device that takes advantage of the viscosity of a fluid to dissipate the input energy. The ideal viscous fluid is able to dissipate energy and cannot store energy at all, which does not exist in reality. For general dampers, silicon oil is typically selected as the viscous material. However, silicon oil has great compressibility, which leads to the dynamic stiffness of dampers under vibration processes. The dynamic stiffness depends on the type of silicon oil, the frequency of excitation, and the size of the valve. For products produced by different manufacturers, stiffness varies. According to an experimental study, dynamic stiffness is related to the damping coefficient of the damper as follows [
32]:
where
represents the dynamic stiffness,
represents the dynamic stiffness coefficient, and
represents the damping coefficient.
As the dampers can both store and dissipate energy under vibration processes, the Maxwell model can be used [
46]. The Maxwell model consists of a spring element and a damping element, which are depicted in
Figure 1. The restoring force of the Maxwell model is shown in Equation (2):
where
is the damping exponent of the viscous damper,
is the output force of the Maxwell model,
is the relative deformation of the spring element, and
is the relative velocity of the damping element.
The total deformation of the Maxwell model,
, comprises the deformation of the spring element and the damping element:
where
is the total deformation of the Maxwell model and
is the deformation of the damping element.
Therefore, the EDR of a single damper can be defined according to the concept of EDR in structural dynamics [
47]. The most common method for defining the EDR is to make the energy dissipated by the damper in a vibration cycle equal to an equivalent viscous system, which is given by the following equation [
45]:
where
represents the EDR of the viscous damper,
is the energy dissipated by the damper in one cycle, and
is the maximum strain energy of the damper structure in one cycle.
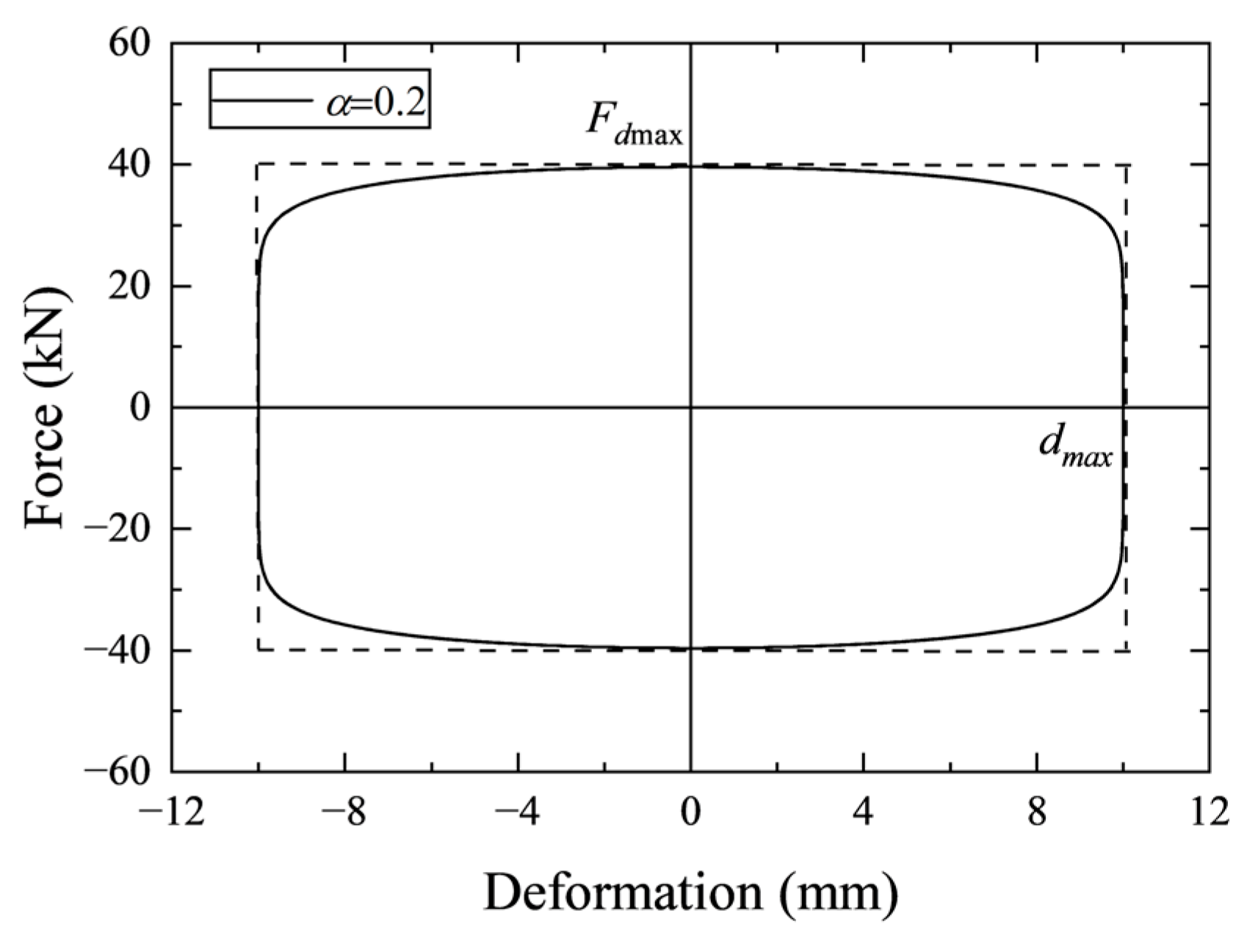
For most kinds of viscous dampers used for resisting seismic excitation, the damping exponent is commonly in the range of 0.1~0.4.
Figure 2 shows a typical hysteresis curve of a nonlinear viscous damper with a damping exponent of 0.2. For practical engineering, it would be complicated to calculate the dissipated and restored energy of the viscous damper. To simplify the calculation, a simplified parallelogram encompassing the hysteresis curve of the damper is introduced, which is represented by the dashed line in
Figure 2. The energy dissipation capacity of the viscous damper can be approximately obtained by the area of the simplified parallelogram.
To determine if the approximation of the calculation of energy dissipation is acceptable, the area error between the ideal hysteresis curve and the simplified parallelogram is explored. First, without considering the dynamic stiffness of the damper, namely
and
, the hysteresis curve is plotted, as shown in
Figure 3. The area of the hysteresis curve can be calculated as follows [
48]:
where
is the natural circular frequency of the system with dampers,
is the maximum deformation of the damping element in one cycle, and
is the gamma function. Without considering the dynamic stiffness of damper
, the simplified parallelogram becomes rectangular, which is also shown in
Figure 3. The area of the parallelogram can be obtained as:
where
is the area of the simplified parallelogram,
is the maximum force of the Maxwell model in one cycle, and
is the maximum deformation of the Maxwell model in one cycle. The ratio of
to
is:
where
is the reduction coefficient of the parallelogram.
It is obvious that the error is only related to the damping exponent
of the viscous damper.
Figure 4 shows that the ratio varies with
in the range of 0 to 1. The fitting expression of the reduction coefficient of the parallelogram
is given as follows:
Through
, the energy dissipation of the damper can be estimated, which is shown as:
Next, when the dynamic stiffness
is considered,
no longer equals
. The calculation of
is same as Equation (5), but
in Equation (5) is difficult to obtain.
can be approximately obtained by:
where
is the deformation of the Maxwell model at zero force, which equals the maximum deformation of the damping element, namely
. In general, obtaining
is complicated; however, we can obtain the maximum deformation of the Maxwell model
easily through analysis. In this light, the relation between
and
can be explored. This relationship depends on the damping exponent
, the dynamic stiffness
, the circular frequency
of the structure, and the maximum deformation of the Maxwell model
. The first three parameters are decided by the type of viscous damper and the structural characteristics. Therefore,
varies with
. The JSSI Manual provides a fitting expression with high accuracy [
32]. Before the expression is given, the pseudo loss of stiffness of the viscous damper is defined:
where
represents the loss of the stiffness of the viscous damper.
The ratio of the loss of stiffness to the dynamic stiffness is:
and the ratio of
to
is given as follows [
32]:
where
represents the ratio of
to
. The applicable condition of Equation (13) is
, which can fully cover the common range of the parameters of the viscous dampers in practical design. Therefore, Equation (10) can be written as:
The strain energy of the viscous damper can be calculated as half of the product of the maximum damping force
and the maximum deformation
in one cycle. Consistent with the definition of Equation (4), the EDR of viscous damper
can be approximately calculated as follows:
It can be found that can be determined by and . As varies with and is decided by the given , is the function of . Therefore, can reflect the energy dissipation capacity of the viscous damper, and the dampers will be more effective when configured at locations with large story drift. In addition, the limit of story drifts of the damped structure is determined according to the target structural performance. Hence, as the structural performance is determined, the UDR of dampers can be estimated, which will be discussed in a later section.
2.2. Basic Concept of Equivalent Damping Ratio for Viscously Damped Structure
Pushover analysis is a common method to evaluate structural seismic performance. According to performance-based seismic design, several pushover methods have been proposed [
49,
50]. In this study, the CSM was adopted.
As a kind of nonlinear analysis method, the nonlinear behaviors of the structural members should be taken into consideration. When the earthquake drives the structure into an inelastic range, the additional structural damping, which is mainly evoked by the hysteretic effect of the structure members, will be generated. The structural hysteretic damping can also be evaluated by structural EDR, which is a function of the structural ductility factor
[
51]:
where
is the damping ratio of the primary structure and
is the inherent damping ratio of the structure.
When it affects the energy dissipation structure, the damping induced by the dampers should also be considered. The EDR of the damped structure
can be written as:
where
is the additional EDR induced by the dampers.
In the CSM, a spectral reduction factor
is utilized to decrease the elastic spectrum to a reduced response spectrum. The performance point is the intersection point of the reduced response spectrum and the structural capacity spectrum. As the EDR of the damped structure is obtained, the reduction factor
is given by [
50]:
where
is the spectral reduction value in a constant acceleration range of the spectrum and
is spectral reduction value in a constant velocity range of spectrum. The reduced response spectrum is illustrated in
Figure 5;
is the natural period of the primary structure and
is the characteristic period of the site soil.
2.3. Target Response Mitigation Ratio (RMR)
Since the performance point can be obtained through CSM, the inter-story drift, , hereafter referred as drift, can be obtained at this point. Based on the concept of performance-based seismic design, the limits of the drift are assigned according to different performance levels.
For the structures with additional dampers, the primary structure is supposed to be elastic under frequent earthquakes and exempt from collapse under rare earthquakes. A proper limit for the drift in the design stage should be chosen with respect to the design requirements. The target RMR
can be determined based on the drift limit
, which is shown as follows:
The story drifts at the performance point can also be utilized to determine the location of dampers. For all kinds of dampers, it is more effective to install them on stories with large drifts, because that indicates that the story is relatively weak and needs strengthening. Furthermore, minimum deformation is necessary for a viscous damper to dissipate input energy, and with a larger deformation, the dampers can dissipate more input energy. The stories that satisfy the condition of Equation (20) are appropriate for the installation of dampers:
where
denotes the average of story drifts and
denotes the limit value of the ratio of story drift to average drift. The value of
should be set with consideration of the required story drift, the performance of the dampers, etc.
2.4. Determination of UDR
As discussed in
Section 2.1,
depends on
. By obtaining the average
for the installed dampers, the UDR of the dampers can be realized, which suggests that all dampers can offer uniform viscous damping under seismic excitations. Given that the required structural performance has been determined, the average
should be calculated according to limit value of the drift
.
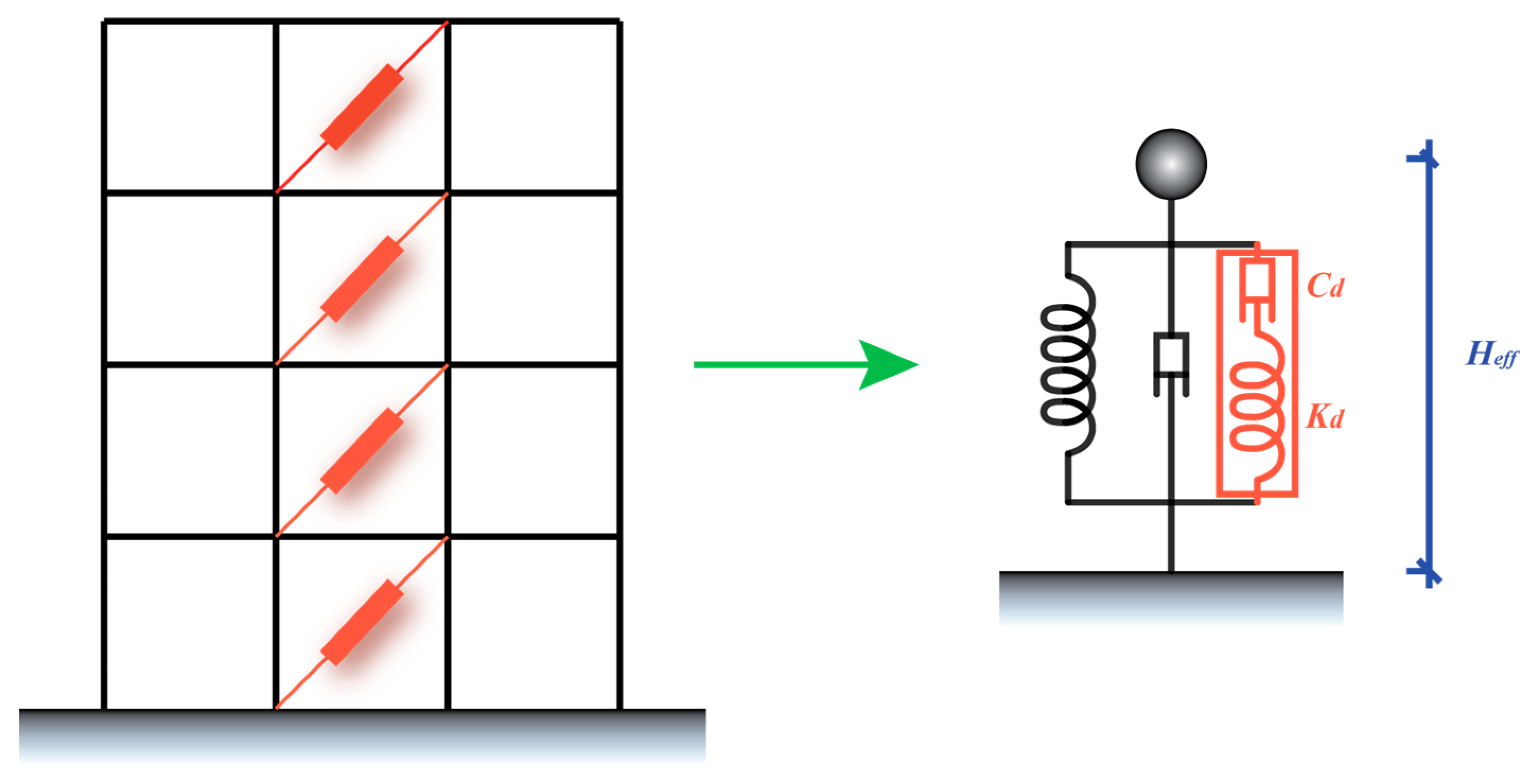
The equivalent SDOF system of the structure is adopted. The diagram of the SDOF system with a viscous damper is depicted in
Figure 6, in which the damper is represented by a Maxwell model. The equivalent story height of the SDOF system can be calculated by Equation (21):
where
denotes the equivalent story height of the SDOF system, which is the mass-weighted average of story height,
denotes the mass at level
i,
denotes the height between level
i and level
i-1, and
is the total number of stories.
The displacement can be obtained according to the limit of the drift
by Equation (22):
In the SDOF system, the maximum deformation of the damper equals the displacement of the system, namely
.
of the viscous damper can be determined on the basis of the limit value of drift
, the natural circular frequency of the structure
, the dynamic stiffness coefficient
, and the damping exponent of the damper
. Then the uniform EDR of dampers
, namely the UDR, can be determined through Equation (15).
2.5. Distribution of Damping Force
Given that
has been determined, the target spectral displacement
can be acquired from Equation (23):
where
is the spectral displacement at the performance point,
is the target spectral acceleration,
is the spectral acceleration at the performance point, and
is the EDR of the damped structure at the target spectral displacement.
Equation (23) implies that the equivalent period
of the structure stays the same after the installation of viscous dampers, and the target spectral displacement
is shown in
Figure 5. The equivalent period
can be obtained by:
Then the target additional EDR offered by dampers
can be derived by:
where
is the structural ductility factor at target spectral displacement.
According to the definition of EDR, the additional EDR induced by dampers
can be calculated through Equation (26):
where
is the energy consumed by the viscous dampers at level
i,
is the maximum strain energy of structure at level
i, and
is the maximum strain energy of dampers at level
i.
By rational design and bracing of the viscous damper, the deformation of viscous damper
at level
i in the horizontal direction can be approximately equal to the inter-story displacement of the structure between level
i and level
i-1:
where
is the inter-story displacement between level
i and level
i-1.
As the purpose of adding a viscous damper is to improve the original structural performance, and the structural performance is reflected by story drifts, the allocation of viscous dampers should be optimized with the story drifts. Based on this principle, the design damping forces of viscous dampers on the stories with large drifts can be increased, while the damping forces of viscous dampers on the stories with small drifts can be decreased. The damping force of a viscous damper at level
i,
, is expressed as:
where
is the damping force factor of the viscous dampers.
Equation (29) can be obtained by substituting Equations (27) and (28) into Equation (26):
where
is the story shear at level
i. Transforming Equation (29),
can be solved by:
As the damping force factor
is known, the damping force
of the viscous damper on each story can be obtained through Equation (28). According to
, the damping coefficient
and damping exponent
of dampers can be determined.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}