
Optimal Tuned Inerter Dampers for Vibration Control Performance of Adjacent Building Structures

 , ,
, ,
Abstract
:1. Introduction
2. The Vibration Control Systems Based on Parallel and Serial TIDs
3. H2 Optimal Design and Results
3.1. Vibration Control System Based on Parallel TID
3.2. Vibration Control System Based on Serial TID
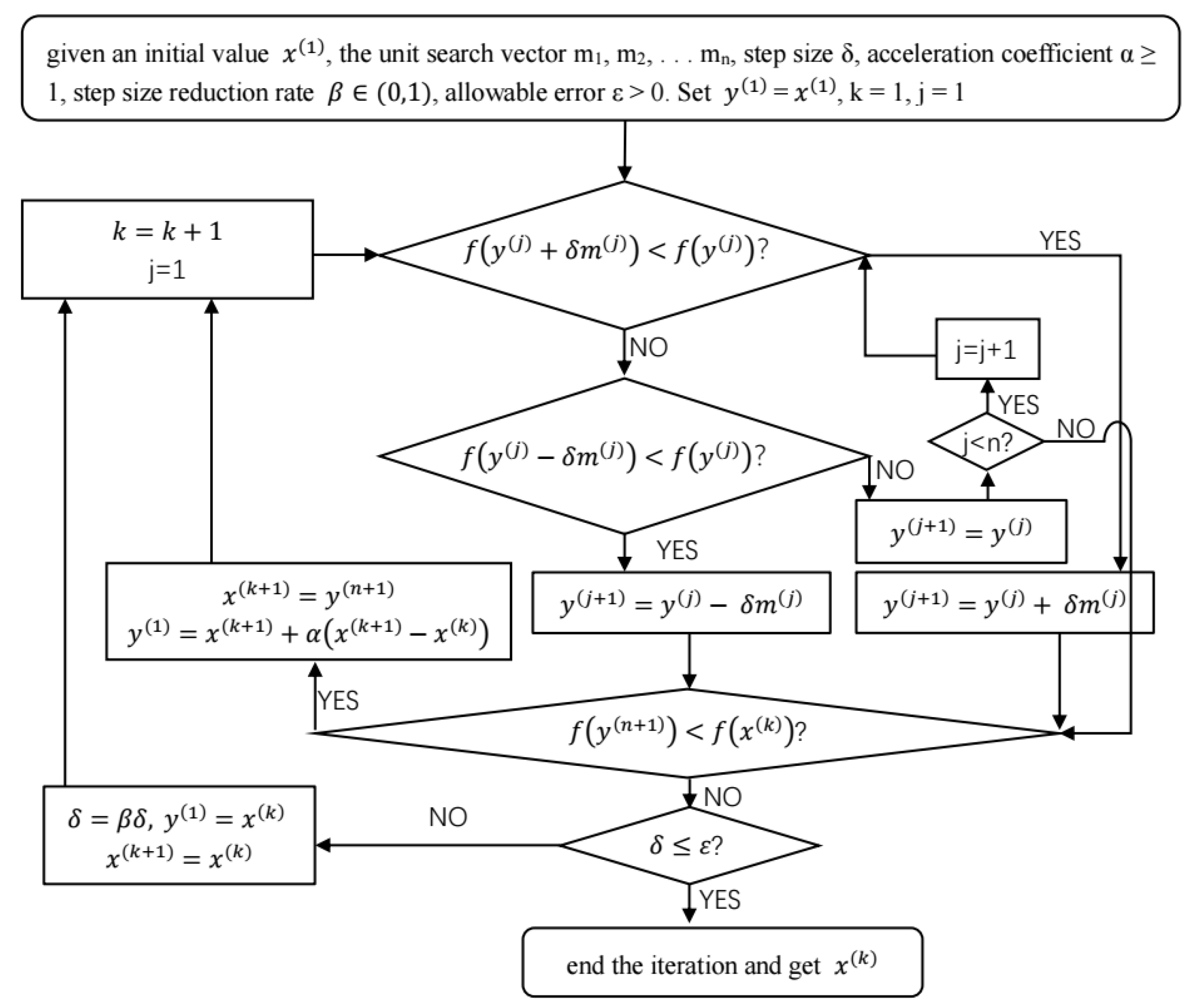
3.3. Parameter Optimization Based on the Monte Carlo Pattern Search Method
- (1)
- Positive axial probing: If , the probe is successful, take ; otherwise, the probing fails, and then perform negative axial probing;
- (2)
- Negative axial probing: If , the probe is successful, take ; otherwise, the probing fails, and y will remain unchanged.
3.4. Parameters in Control Systems Based on Parallel and Serial TID
3.4.1. Inertial Mass Ratio
3.4.2. Frequency Response Function and
3.4.3. Frequency Response Function and
4. Verification in the Time Domain
5. Conclusions
- When the mass ratios of adjacent buildings in two vibration control systems are close to each other, the amplitude of the frequency response function of the buildings will increase. Therefore, appropriately increasing the mass ratio of adjacent buildings helps to improve the vibration control performance of the system.
- Compared with the vibration control system based on serial TID, the vibration control system based on parallel TID can not only reduce the amplitude of the frequency response function of the building more effectively, but also apply to a wider range of frequencies.
- Increasing the damping ratio of the building can effectively improve the amplitude of the frequency response function of the building. When the damping of the building is relatively low, a slight increase in the damping ratio can significantly reduce the amplitude of the frequency response function. However, when the damping ratio of the building is large, it is not worthwhile to continue to increase the damping ratio.
- Compared with the vibration control system based on serial TID, the vibration control system based on parallel TID has higher robustness and stability. In addition, the vibration control system based on parallel TID can better reduce the vibration amplitude of adjacent buildings under the action of seismic excitation.
- The vibration control system based on parallel TID dissipates seismic energy mainly by large damping, while the vibration control system based on serial TID protects buildings mainly by converting seismic energy into dynamic energy.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D
| f_new = rosenbrock(x_new(1), x_new(2)); |
| if f_new < f_i |
| x_i = x_new; |
| f_i = f_new; |
| end |
| end |
| if f_i < f_min |
| x_min = x_i; |
| f_min = f_i; |
| end |
| end |
References
- Pisal, A.Y.; Jangid, R.S. Vibration control of bridge subjected to multi-axle vehicle using multiple tuned mass friction dampers. Int. J. Adv. Struct. Eng. 2016, 8, 213–227. [Google Scholar] [CrossRef] [Green Version]
- Debbarma, R.; Chakraborty, S.; Ghosh, S.K. Optimum design of tuned liquid column dampers under stochastic earthquake load considering uncertain bounded system parameters. Int. J. Mech. Sci. 2010, 52, 1385–1393. [Google Scholar] [CrossRef]
- Gao, H.; Kwok, K.; Samali, B. Optimization of tuned liquid column dampers. Eng. Struct. 1997, 19, 476–486. [Google Scholar] [CrossRef]
- Ras, A.; Boumechra, N. Seismic energy dissipation study of linear fluid viscous dampers in steel structure design. Alex. Eng. J. 2016, 55, 2821–2832. [Google Scholar] [CrossRef] [Green Version]
- Lavan, O.; Levy, R. Optimal design of supplemental viscous dampers for linear framed structures. Earthq. Eng. Struct. Dyn. 2006, 35, 337–356. [Google Scholar] [CrossRef]
- Chatzikonstantinou, N.; Makarios, T.K.; Athanatopoulou, A. Integration Method for Response History Analysis of Single-Degree-of-Freedom Systems with Negative Stiffness. Buildings 2022, 12, 1214. [Google Scholar] [CrossRef]
- Chang, H.; Liu, L.; Jing, L.; Lu, J.; Cao, S. Study on Damping Performance of Hyperboloid Damper with SMA-Negative Stiffness. Buildings 2022, 12, 1111. [Google Scholar] [CrossRef]
- Wang, M.; Sun, F.; Nagarajaiah, S. Simplified optimal design of MDOF structures with negative stiffness amplifying dampers based on effective damping. Struct. Des. Tall Spéc. Build. 2019, 28, e1664. [Google Scholar] [CrossRef]
- Kapasakalis, K.A.; Antoniadis, I.A.; Sapountzakis, E.J. Performance assessment of the KDamper as a seismic Absorption Base. Struct. Control Health Monit. 2020, 27, e2482. [Google Scholar] [CrossRef]
- Jiang, S.; Bi, K.; Ma, R.; Han, Q.; Du, X. Influence of spatially varying ground motions on the seismic responses of bridge structures with KDampers. Eng. Struct. 2023, 277, 115461. [Google Scholar] [CrossRef]
- Lukkunaprasit, P.; Wanitkorkul, A. Inelastic buildings with tuned mass dampers under moderate ground motions from distant earthquakes. Earthq. Eng. Struct. Dyn. 2001, 30, 537–551. [Google Scholar] [CrossRef]
- Lavassani, S.H.H.; Kontoni, D.-P.N.; Alizadeh, H.; Gharehbaghi, V. Passive Control of Ultra-Span Twin-Box Girder Suspension Bridges under Vortex-Induced Vibration Using Tuned Mass Dampers: A Sensitivity Analysis. Buildings 2023, 13, 1279. [Google Scholar] [CrossRef]
- Farshidianfar, A.; Soheili, S. Ant colony optimization of tuned mass dampers for earthquake oscillations of high-rise structures including soil–structure interaction. Soil Dyn. Earthq. Eng. 2013, 51, 14–22. [Google Scholar] [CrossRef]
- Khoshnoudian, F.; Ziaei, R.; Ayyobi, P.; Paytam, F. Effects of nonlinear soil–structure interaction on the seismic response of structure-TMD systems subjected to near-field earthquakes. Bull. Earthq. Eng. 2017, 15, 199–226. [Google Scholar] [CrossRef]
- De Angelis, M.; Perno, S.; Reggio, A. Dynamic response and optimal design of structures with large mass ratio TMD. Earthq. Eng. Struct. Dyn. 2011, 41, 41–60. [Google Scholar] [CrossRef]
- Hoang, N.; Fujino, Y.; Warnitchai, P. Optimal tuned mass damper for seismic applications and practical design formulas. Eng. Struct. 2008, 30, 707–715. [Google Scholar] [CrossRef]
- Jin, L.; Li, B.; Lin, S.; Li, G. Optimal Design Formula for Tuned Mass Damper Based on an Analytical Solution of Interaction between Soil and Structure with Rigid Foundation Subjected to Plane SH-Waves. Buildings 2023, 13, 17. [Google Scholar] [CrossRef]
- Kampitsis, A.; Kapasakalis, K.; Via-Estrem, L. An integrated FEA-CFD simulation of offshore wind turbines with vibration control systems. Eng. Struct. 2022, 254, 113859. [Google Scholar] [CrossRef]
- Mishra, S.K.; Gur, S.; Chakraborty, S. An improved tuned mass damper (SMA-TMD) assisted by a shape memory alloy spring. Smart Mater. Struct. 2013, 22, 095016. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. Earthquake-resilient design of base isolated buildings with TMD at basement: Application to a case study. Soil Dyn. Earthq. Eng. 2018, 113, 503–521. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. Improving the dynamic performance of base-isolated structures via tuned mass damper and inerter devices: A comparative study. Struct. Control Health Monit. 2018, 25, e2234. [Google Scholar] [CrossRef]
- Salvi, J.; Rizzi, E. Optimum tuning of Tuned Mass Dampers for frame structures under earthquake excitation. Struct. Control Health Monit. 2014, 22, 707–725. [Google Scholar] [CrossRef]
- Leung, A.Y.T.; Zhang, H.; Cheng, C.C.; Lee, Y.Y. Particle swarm optimization of TMD by non-stationary base excitation during earthquake. Earthq. Eng. Struct. Dyn. 2008, 37, 1223–1246. [Google Scholar] [CrossRef]
- Etedali, S.; Akbari, M.; Seifi, M. MOCS-based optimum design of TMD and FTMD for tall buildings under near-field earthquakes including SSI effects. Soil Dyn. Earthq. Eng. 2019, 119, 36–50. [Google Scholar] [CrossRef]
- ABE, M. SEMI-ACTIVE TUNED MASS DAMPERS FOR SEISMIC PROTECTION OF CIVIL STRUCTURES. Earthq. Eng. Struct. Dyn. 1996, 25, 743–749. [Google Scholar] [CrossRef]
- Lin, C.-C.; Lin, G.-L.; Wang, J.-F. Protection of seismic structures using semi-active friction TMD. Earthq. Eng. Struct. Dyn. 2009, 39, 635–659. [Google Scholar] [CrossRef]
- Xiang, Y.; Tan, P.; He, H.; Chen, Q. Seismic Optimization for Hysteretic Damping-Tuned Mass Damper (HD-TMD) Subjected to White-Noise Excitation. Struct. Control Health Monit. 2023, 2023, 1–21. [Google Scholar] [CrossRef]
- Anagnostopoulos, S.A.; Spiliopoulos, K.V. An investigation of earthquake induced pounding between adjacent buildings. Earthq. Eng. Struct. Dyn. 1992, 21, 289–302. [Google Scholar] [CrossRef]
- Raheem, S.E.A. Mitigation measures for earthquake induced pounding effects on seismic performance of adjacent buildings. Bull. Earthq. Eng. 2014, 12, 1705–1724. [Google Scholar] [CrossRef]
- Xu, Y.; He, Q.; Ko, J. Dynamic response of damper-connected adjacent buildings under earthquake excitation. Eng. Struct. 1999, 21, 135–148. [Google Scholar] [CrossRef]
- Abdullah, M.M.; Hanif, J.H.; Richardson, A.; Sobanjo, J. Use of a shared tuned mass damper (STMD) to reduce vibration and pounding in adjacent structures. Earthq. Eng. Struct. Dyn. 2001, 30, 1185–1201. [Google Scholar] [CrossRef]
- Su, N.; Peng, S.; Hong, N.; Xia, Y. Wind-induced vibration absorption using inerter-based double tuned mass dampers on slender structures. J. Build. Eng. 2022, 58, 104993. [Google Scholar] [CrossRef]
- Bian, Y.; Liu, X.; Sun, Y.; Zhong, Y. Optimized Design of a Tuned Mass Damper Inerter (TMDI) Applied to Circular Section Members of Transmission Towers. Buildings 2022, 12, 1154. [Google Scholar] [CrossRef]
- Islam, N.U.; Jangid, R.S. Optimum parameters and performance of negative stiffness and inerter based dampers for base-isolated structures. Bull. Earthq. Eng. 2023, 21, 1411–1438. [Google Scholar] [CrossRef]
- Gonzalez-Buelga, A.; Lazar, I.F.; Jiang, J.Z.; Neild, S.A.; Inman, D.J. Assessing the effect of nonlinearities on the performance of a tuned inerter damper. Struct. Control Health Monit. 2017, 24, e1879. [Google Scholar] [CrossRef] [Green Version]
- Smith, M. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.Z.; Hu, Y.; Huang, L.; Chen, G. Influence of inerter on natural frequencies of vibration systems. J. Sound Vib. 2014, 333, 1874–1887. [Google Scholar] [CrossRef] [Green Version]
- Islam, N.U.; Jangid, R.S. Optimum Parameters of Tuned Inerter Damper for Damped Structures. J. Sound Vib. 2022, 537, 117218. [Google Scholar] [CrossRef]
- Kaveh, A.; Farzam, M.F.; Jalali, H.H. Statistical seismic performance assessment of tuned mass damper inerter. Struct. Control Health Monit. 2020, 27, e2602. [Google Scholar] [CrossRef]
- Di Matteo, A.; Masnata, C.; Adam, C.; Pirrotta, A. Optimal design of tuned liquid column damper inerter for vibration control. Mech. Syst. Signal Process. 2021, 167, 108553. [Google Scholar] [CrossRef]
- Lazar, I.; Neild, S.; Wagg, D. Vibration suppression of cables using tuned inerter dampers. Eng. Struct. 2016, 122, 62–71. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.Z.; Papageorgiou, C.; Scheibe, F.; Wang, F.-C.; Smith, M.C. The missing mechanical circuit element. IEEE Circuits Syst. Mag. 2009, 9, 10–26. [Google Scholar] [CrossRef]
- Kang, X.; Li, S.; Hu, J. Design and Parameter Optimization of the Reduction-Isolation Control System for Building Structures Based on Negative Stiffness. Buildings 2023, 13, 489. [Google Scholar] [CrossRef]
- Shen, W.; Niyitangamahoro, A.; Feng, Z.; Zhu, H. Tuned inerter dampers for civil structures subjected to earthquake ground motions: Optimum design and seismic performance. Eng. Struct. 2019, 198, 109470. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 1.714 | 1.136 | 1.880 | 0.825 | 0.816 | 0.162 | 0.478 | 0.168 |
| 1.5 | 1.566 | 1.120 | 1.996 | 0.617 | 0.803 | 0.146 | 0.464 | 0.205 |
| 2 | 1.428 | 1.118 | 1.992 | 0.516 | 0.789 | 0.135 | 0.451 | 0.236 |
| Parameters | Left Building | Right Building | Serial TID |
|---|---|---|---|
| Mass (or inertance) (kg) | |||
| Damping (kN∙s/m) | |||
| Stiffness (kN/m) |
| Earthquake | Peak Displacement of the Left Building (m) | Peak Displacement of the Right Building (m) | ||
|---|---|---|---|---|
| Parallel | Serial | Parallel | Serial | |
| EL Centro | 0.006268976 | 0.006456939 | 0.013943537 | 0.017472398 |
| Taft | 0.00273925 | 0.0028741 | 0.00546403 | 0.00981471 |
| San Fernando | 0.00494972 | 0.00594365 | 0.0105261 | 0.01917793 |
| Northridge | 0.0049613 | 0.0057407 | 0.01169996 | 0.01555647 |
| Earthquake | Dynamic Energy of TID at Optimizing the Left Building (J) | Dynamic Energy of TID at Optimizing the Right Building (J) | ||
|---|---|---|---|---|
| Parallel | Serial | Parallel | Serial | |
| EL Centro | 37.33402959 | 434.2079697 | 65.37584434 | 378.3601604 |
| Taft | 5.6693004 | 97.4129119 | 11.6575391 | 93.0073466 |
| San Fernando | 32.0653859 | 318.2491057 | 3.7418221 | 247.6958092 |
| Northridge | 4.3210444 | 330.3161681 | 49.7483858 | 270.1696667 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, X.; Tang, J.; Li, F.; Wu, J.; Wei, J.; Huang, Q.; Li, Z.; Zhang, F.; Sheng, Z. Optimal Tuned Inerter Dampers for Vibration Control Performance of Adjacent Building Structures. Buildings 2023, 13, 1803. https://doi.org/10.3390/buildings13071803
Kang X, Tang J, Li F, Wu J, Wei J, Huang Q, Li Z, Zhang F, Sheng Z. Optimal Tuned Inerter Dampers for Vibration Control Performance of Adjacent Building Structures. Buildings. 2023; 13(7):1803. https://doi.org/10.3390/buildings13071803
Chicago/Turabian StyleKang, Xiaofang, Jianjun Tang, Feng Li, Jian Wu, Jiachen Wei, Qiwen Huang, Zhi Li, Fuyi Zhang, and Ziyi Sheng. 2023. "Optimal Tuned Inerter Dampers for Vibration Control Performance of Adjacent Building Structures" Buildings 13, no. 7: 1803. https://doi.org/10.3390/buildings13071803