
Four-Dimensional (4D) Millimeter Wave-Based Sensing and Its Potential Applications in Digital Construction: A Review

Abstract
:1. Introduction
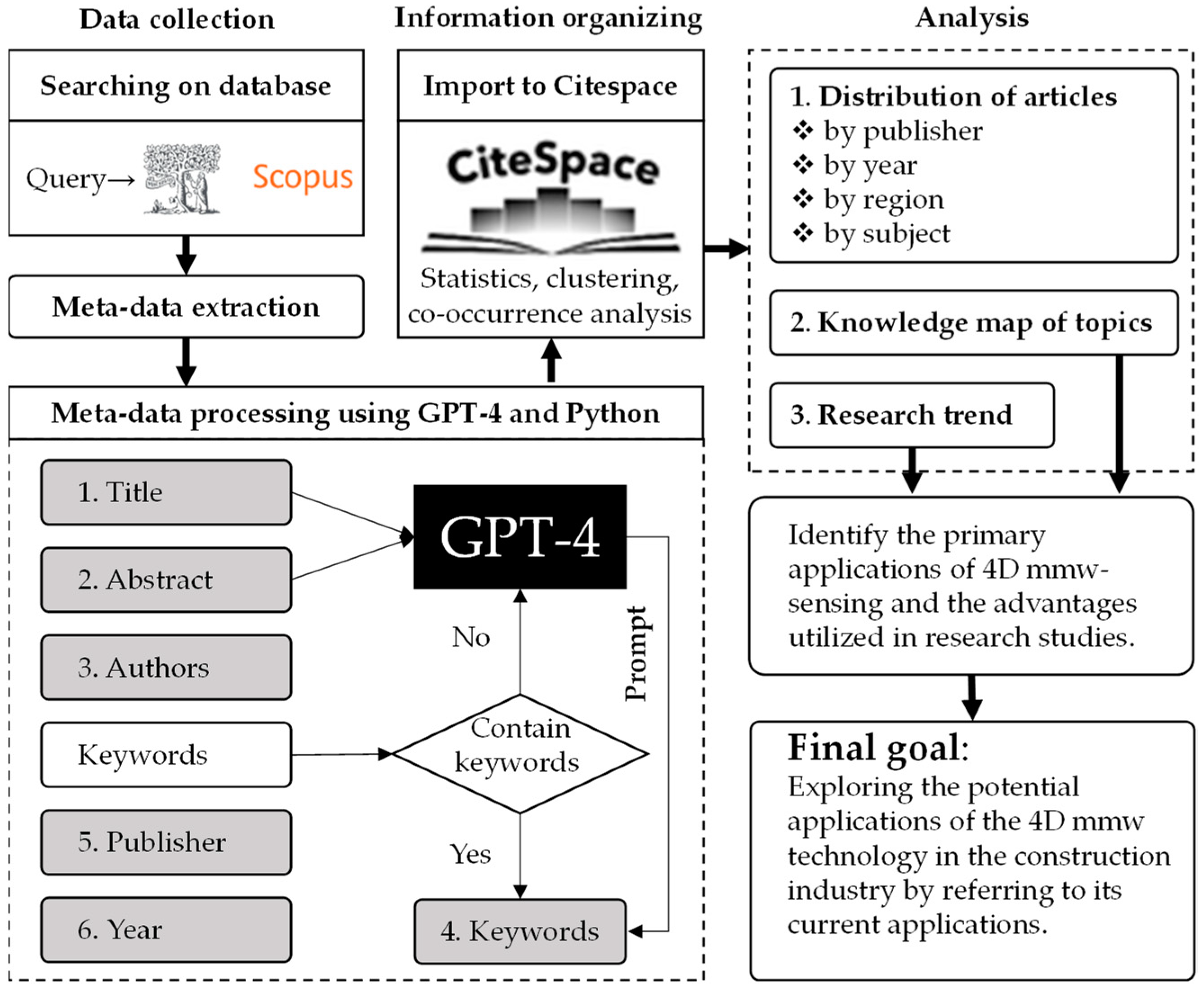
2. Methodology
Query: (title-abs-key (mmw or “millimeter wave” or “millimetre wave” or “millime-ter-wave” or “millimetre-wave”) and title-abs-key (radar) and title-abs-key (4D or 3D or “point cloud” or “point cloud” or “imagining”) and title-abs-key (sens* or identif* or perceive* or classif* or monitor*)) and pubyear > 2018 and pubyear < 2024.
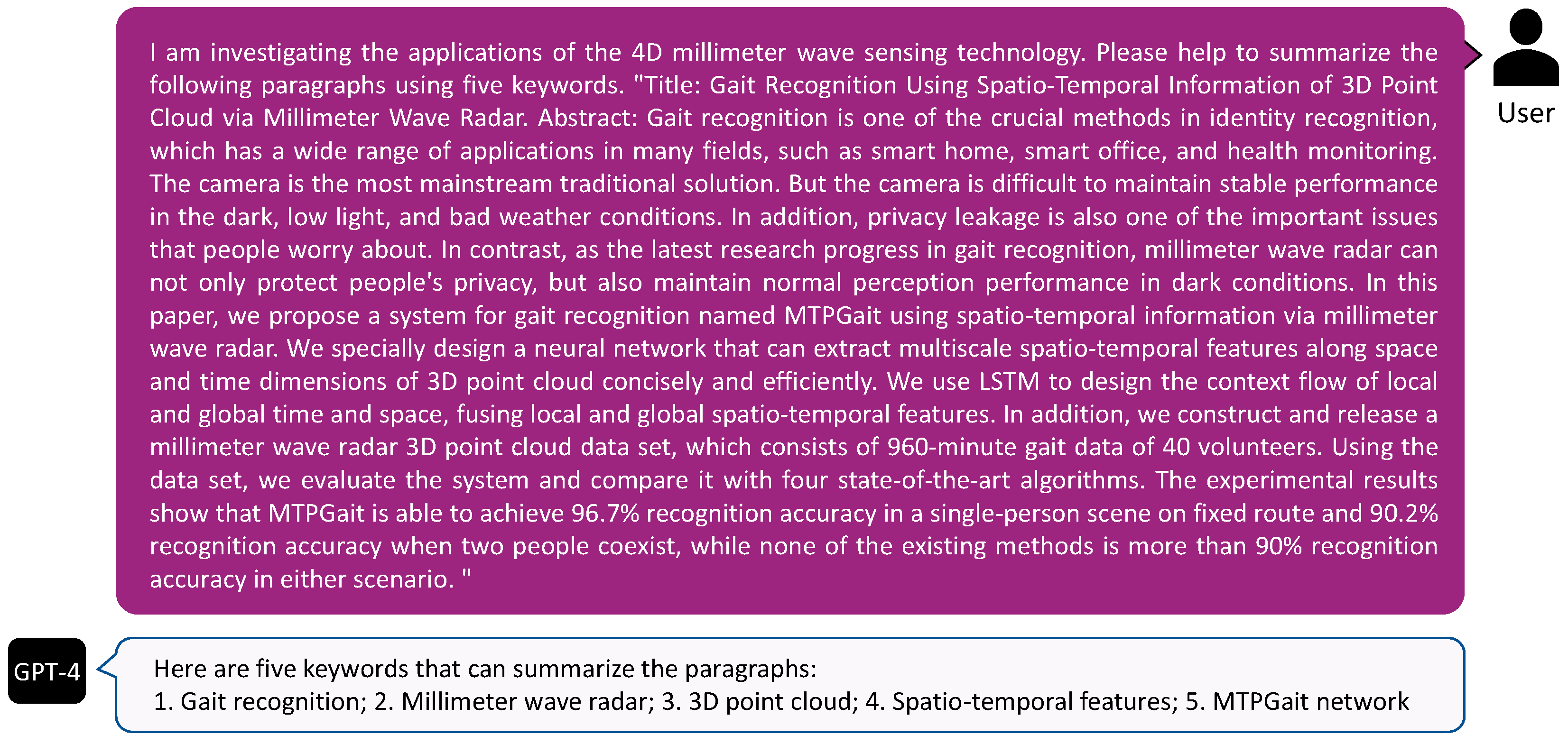
Prompt: I am investigating the applications of the 4D millimeter wave sensing technology. Please help to summarize the following paragraphs using five keywords. “Title: (title of the publication). Abstract: (abstract of the publication)”.
3. Overview of the Selected Publications
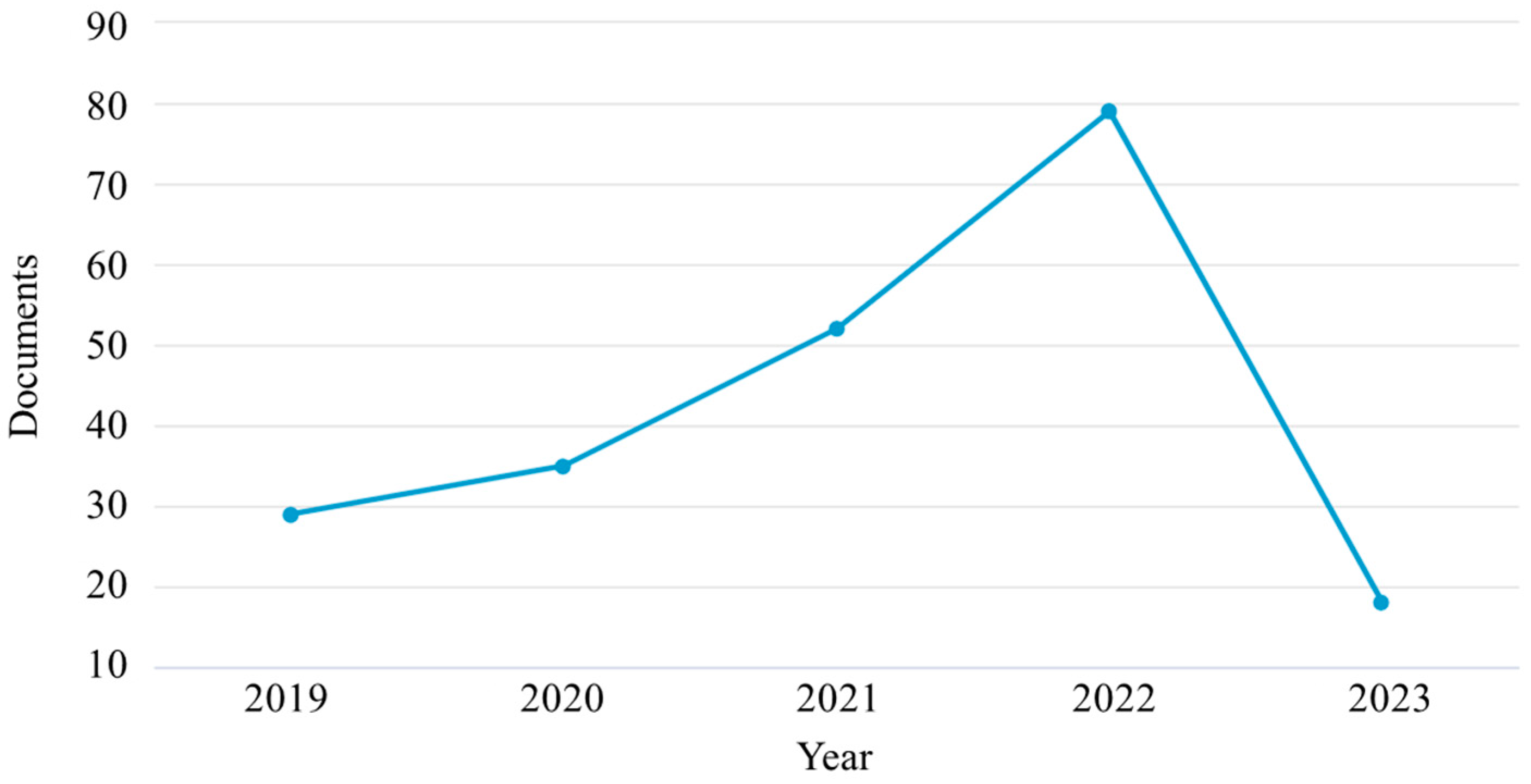
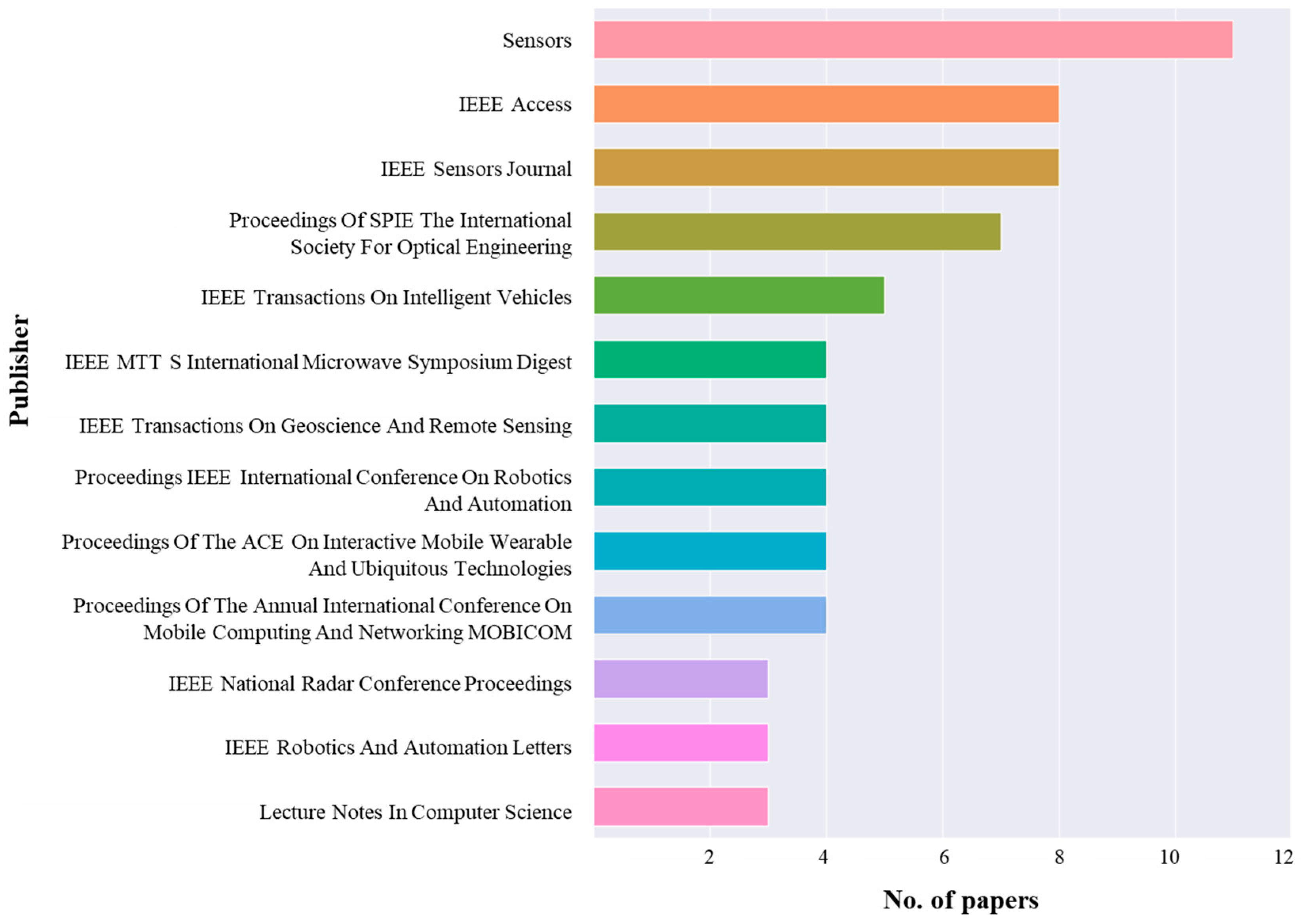
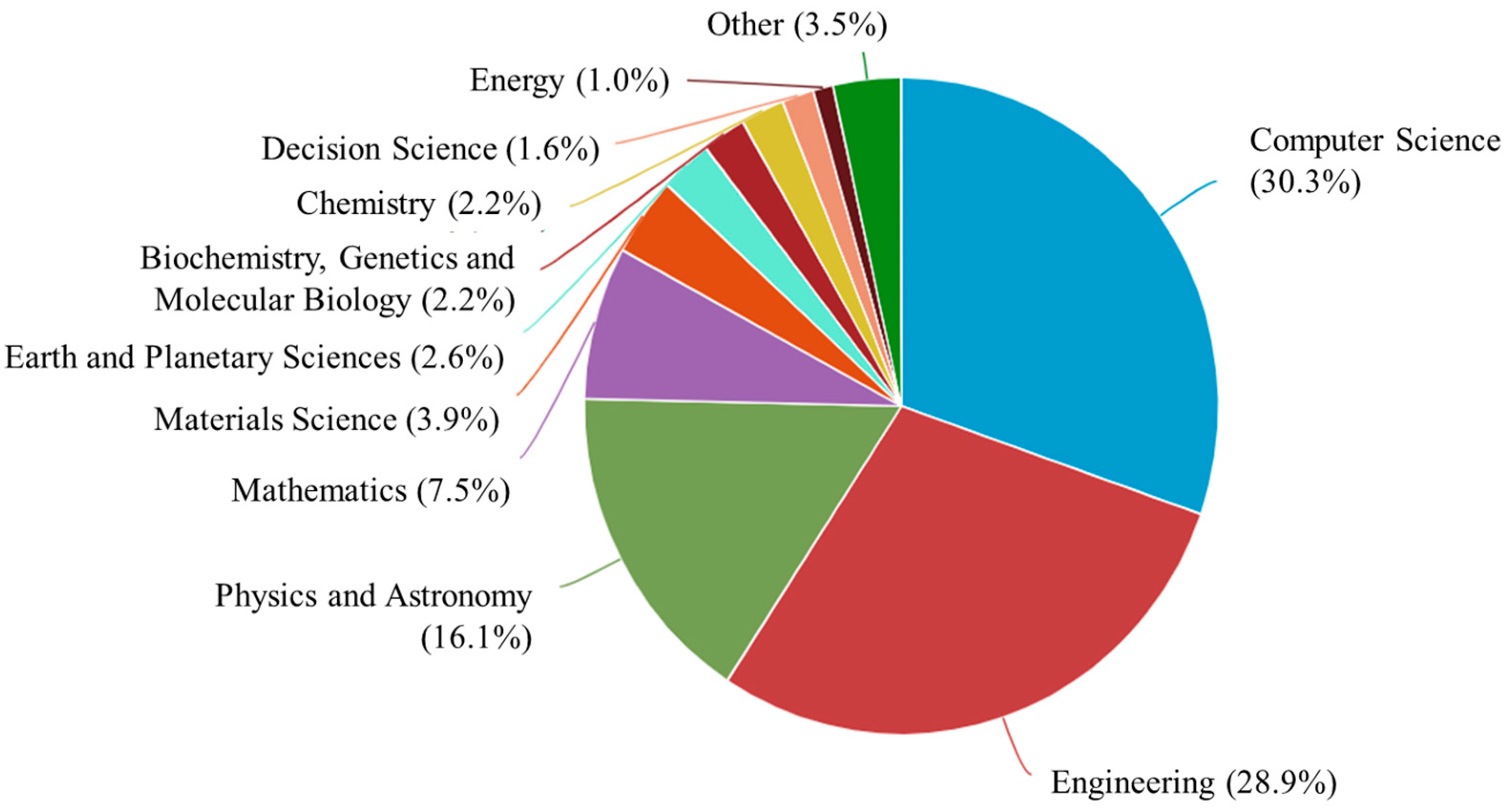
3.1. Distribution of Articles
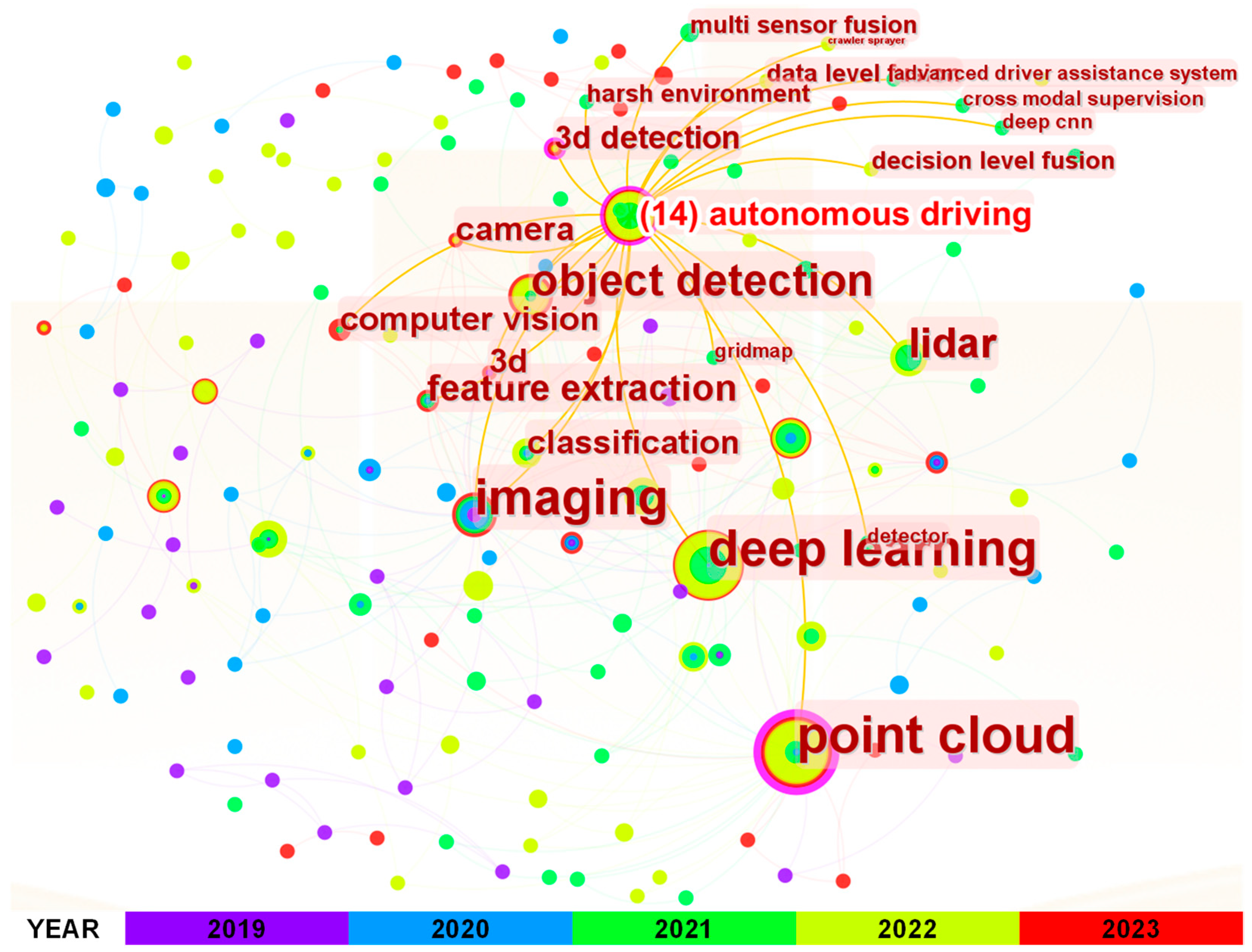
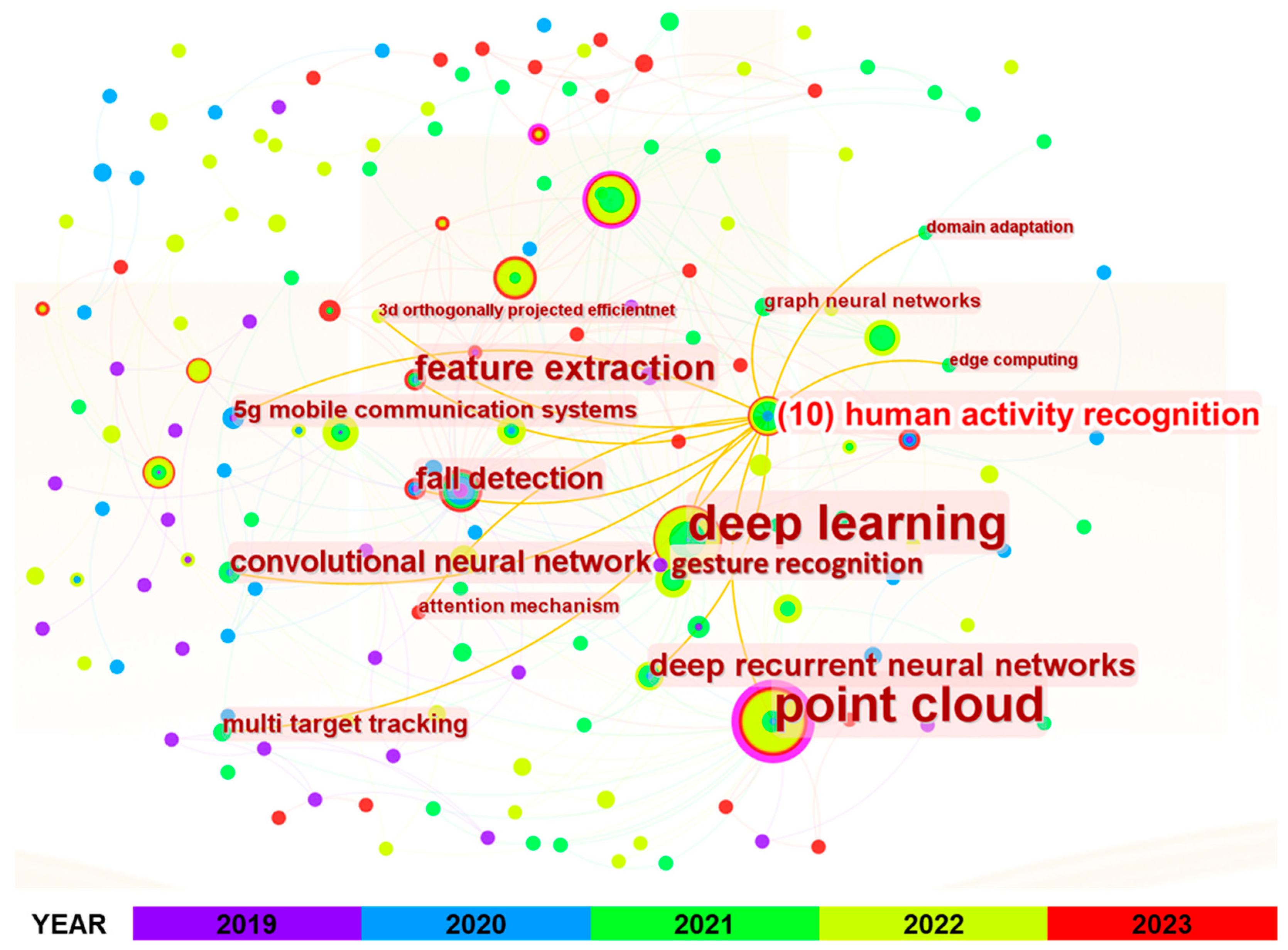
3.2. Knowledge Map of Topics
3.3. Research Trend
4. Summary of Current Applications
4.1. Autonomous Driving and Transportation
4.2. Human Activity Recognition
4.3. Application in Robotics
4.4. Other Applications
5. Potential Applications in Digital Construction
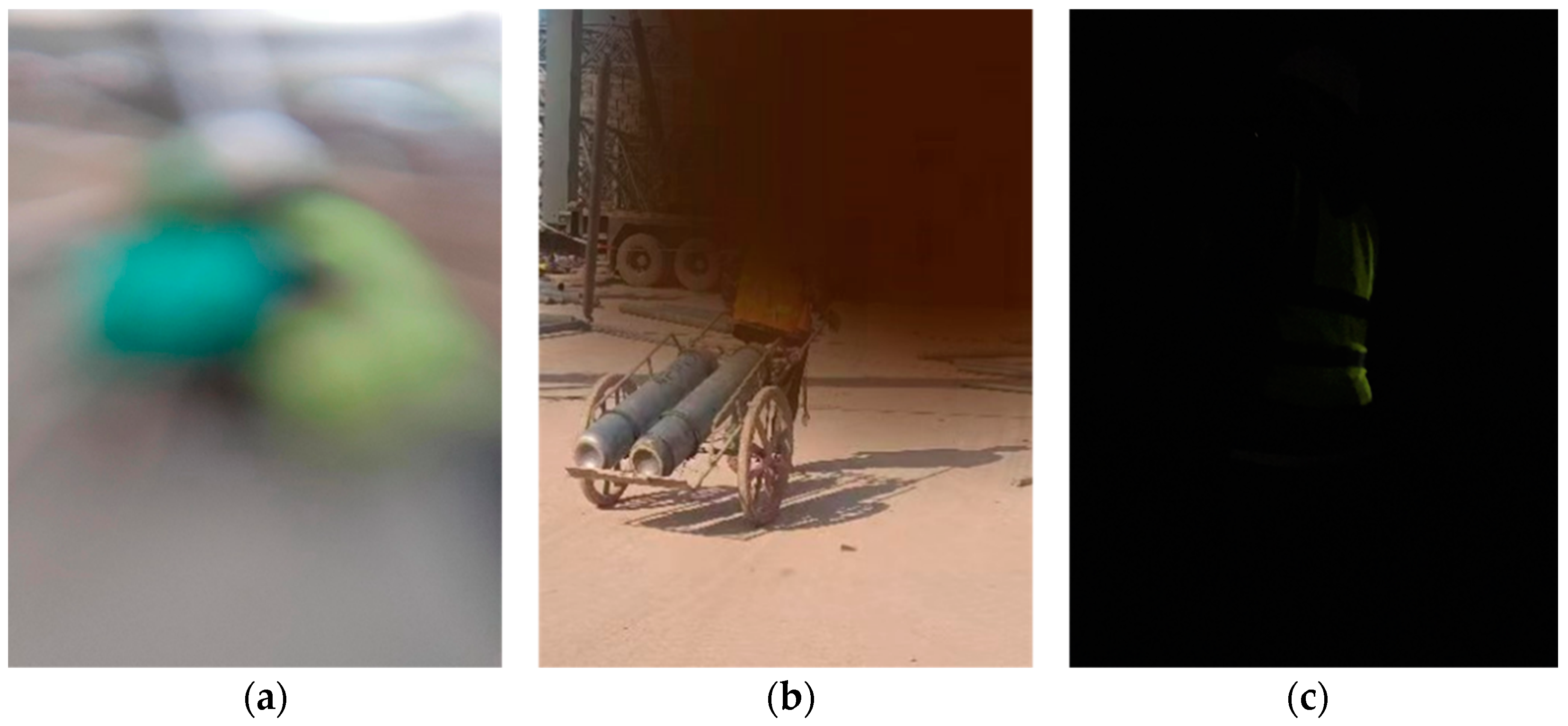
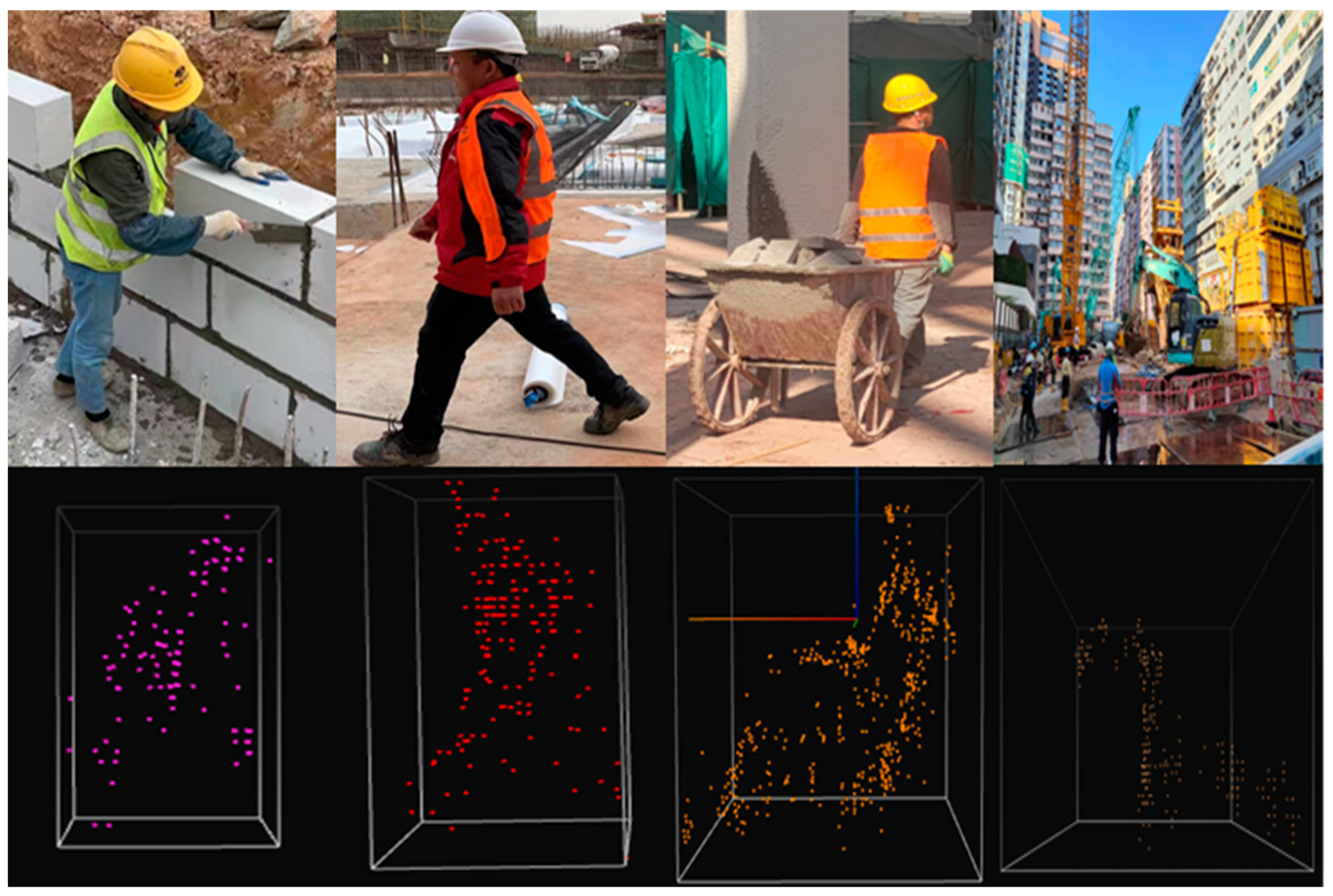
5.1. Sensing Requirements on Construction Sites
5.2. Site Monitoring
5.3. Environment Understanding
5.4. Health Monitoring of Workers
5.5. Limitations of Using 4D mmw-Based Sensing in Construction
6. Conclusions
- (1)
- Regarding the methodology, the major innovation is that the famous large-language model, GPT-4, is initially applied to enhance traditional scientometric analysis. It is used to generate the keywords for the selected publications (e.g., IET Biometrics and some proceedings) that lack them. The complete bibliometric method involving GPT-4 is presented, i.e., (1) data searching, (2) metadata extraction, (3) metadata processing using GPT-4 and Python, and (4) Citespace-based analysis.
- (2)
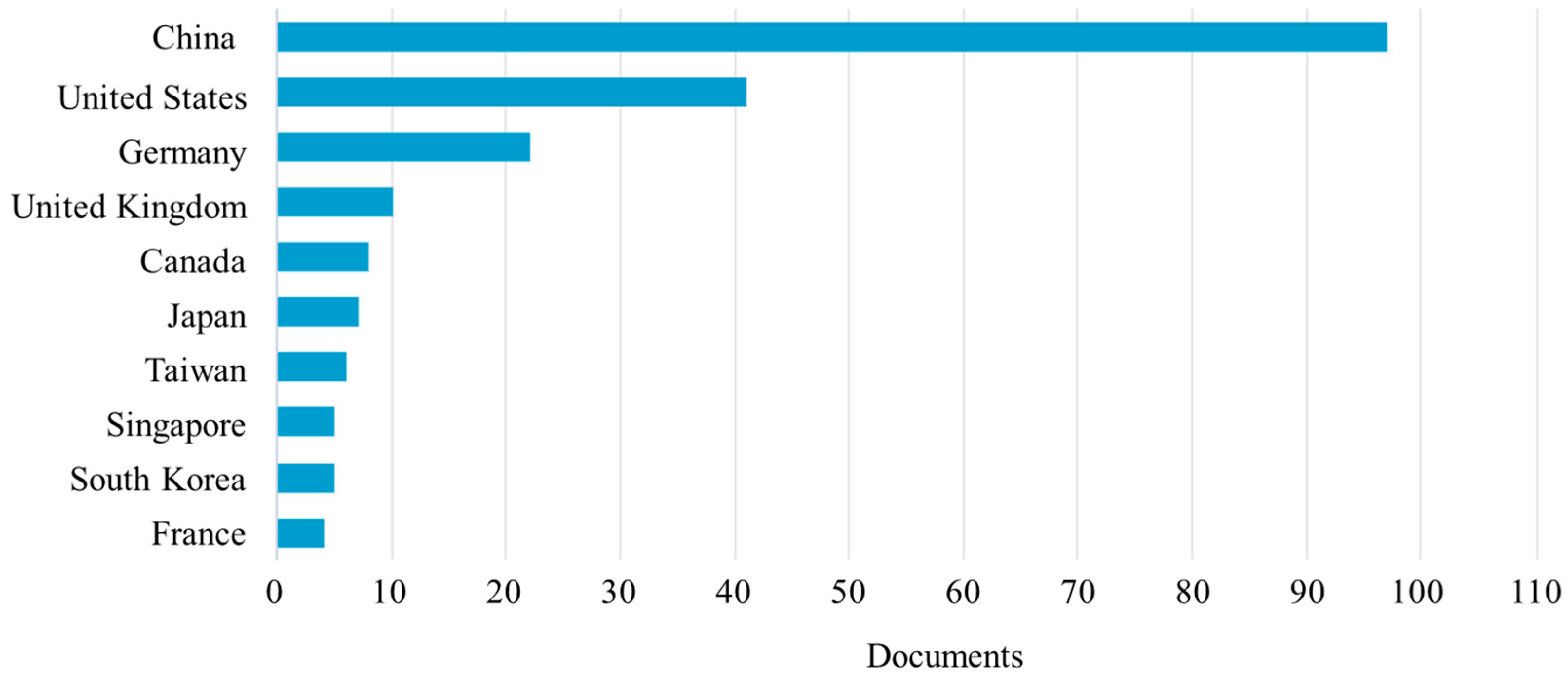
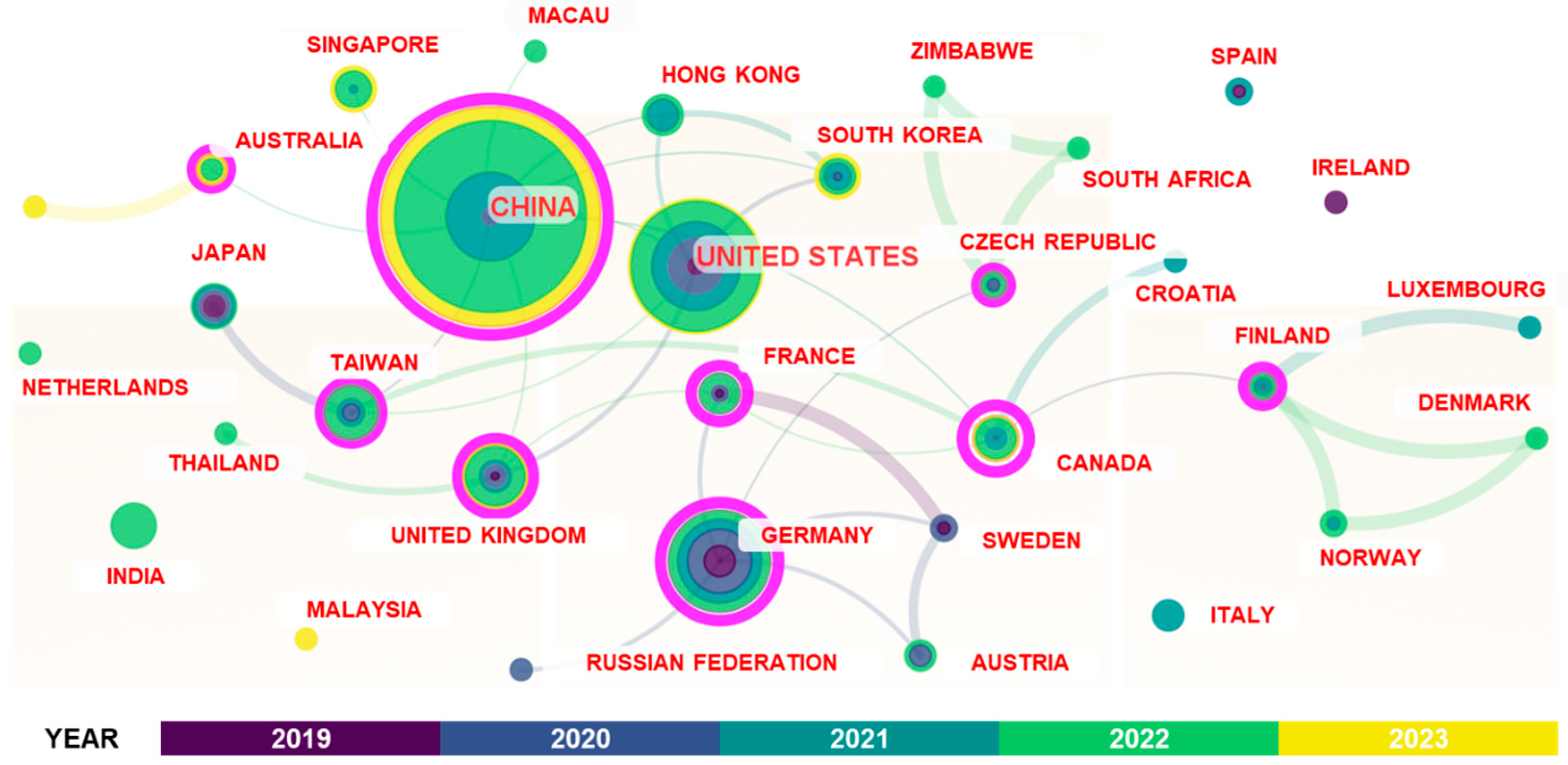
- In total, 213 publications are collected according to our query rules. The dates demonstrate a geometric increase in attention towards 4D mmw-based sensing in recent years. The distribution of publishers shows that the theoretical research of 4D mmw technology is still a point of focus for researchers, and the significant proportion of international conference papers indicates the high level of activity and extensive international collaborations in this field. It can also be found that the major researchers are involved in the following fields: Computer Science, Engineering, and Physics and Astronomy. Additionally, China, the US, and Germany are identified as the most significant contributors in this field.
- (3)
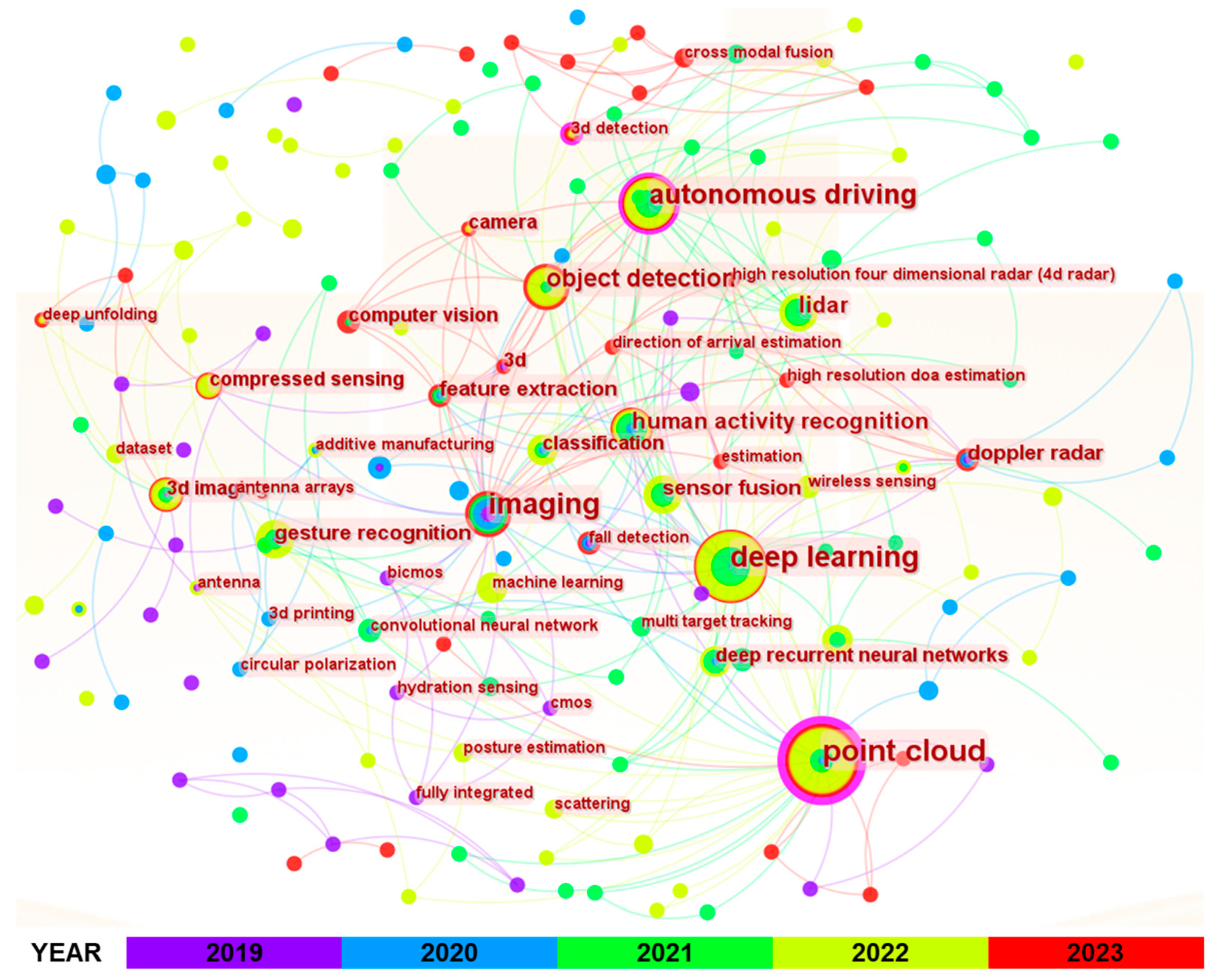
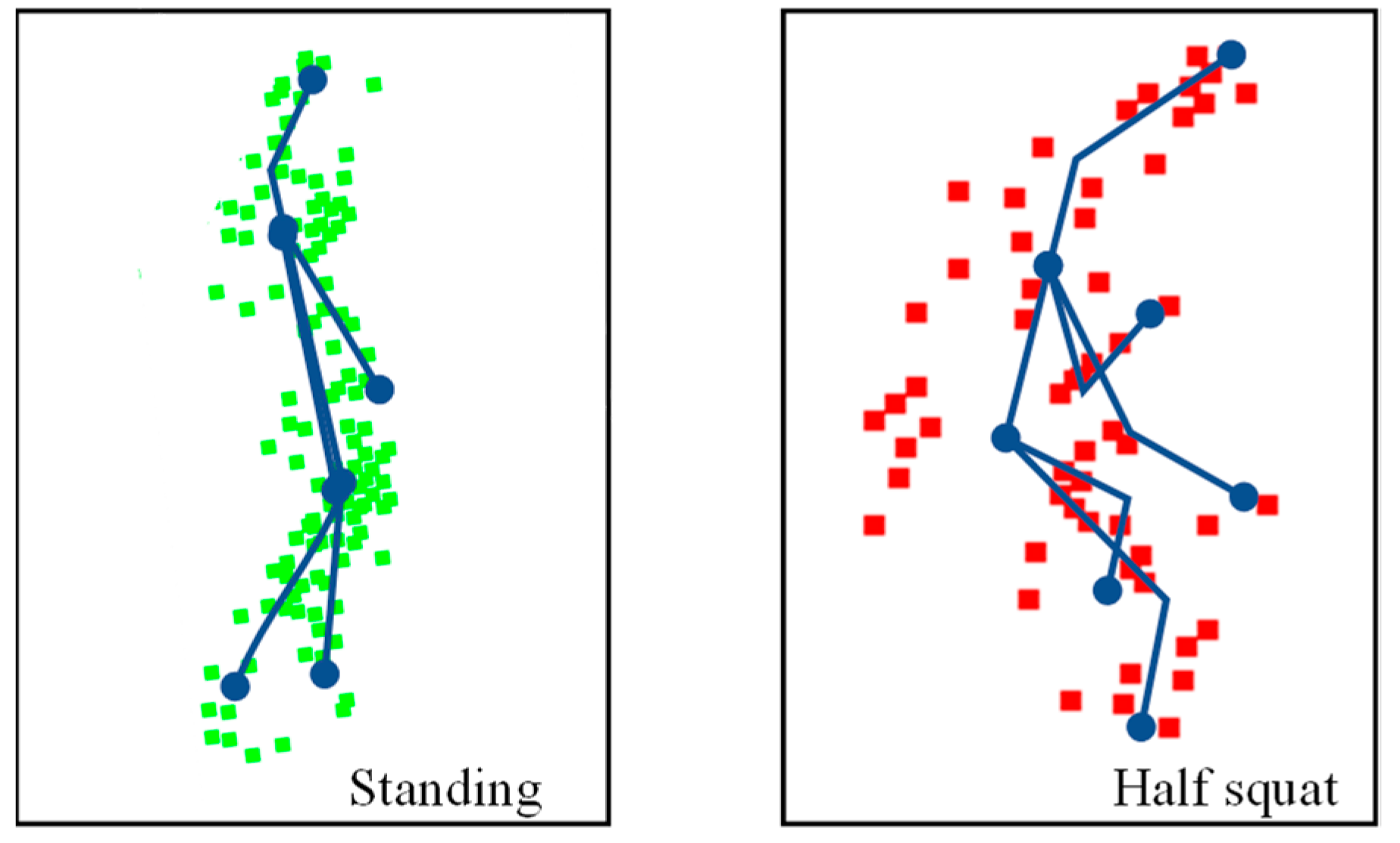
- The major applications of 4D mmw-based sensing are identified based on the knowledge map and clustering results of Citespace. As a technology derived from autonomous driving, 4D mmw-based sensing has been widely utilized for ADAS, object detection and recognition, object tracking and motion prediction, and self-localization and mapping. As a high-resolution and robust sensor, a 4D mmw radar can and has been applied for human activity recognition, including for gesture recognition, posture recognition, and even vital sign monitoring. Robotics is the third application scenario of this technology, which mainly serves as a perception sensor to detect and track objects, relocate them, and avoid obstacles. Other applications can also be found, such as security screening and biometrics.
- (4)
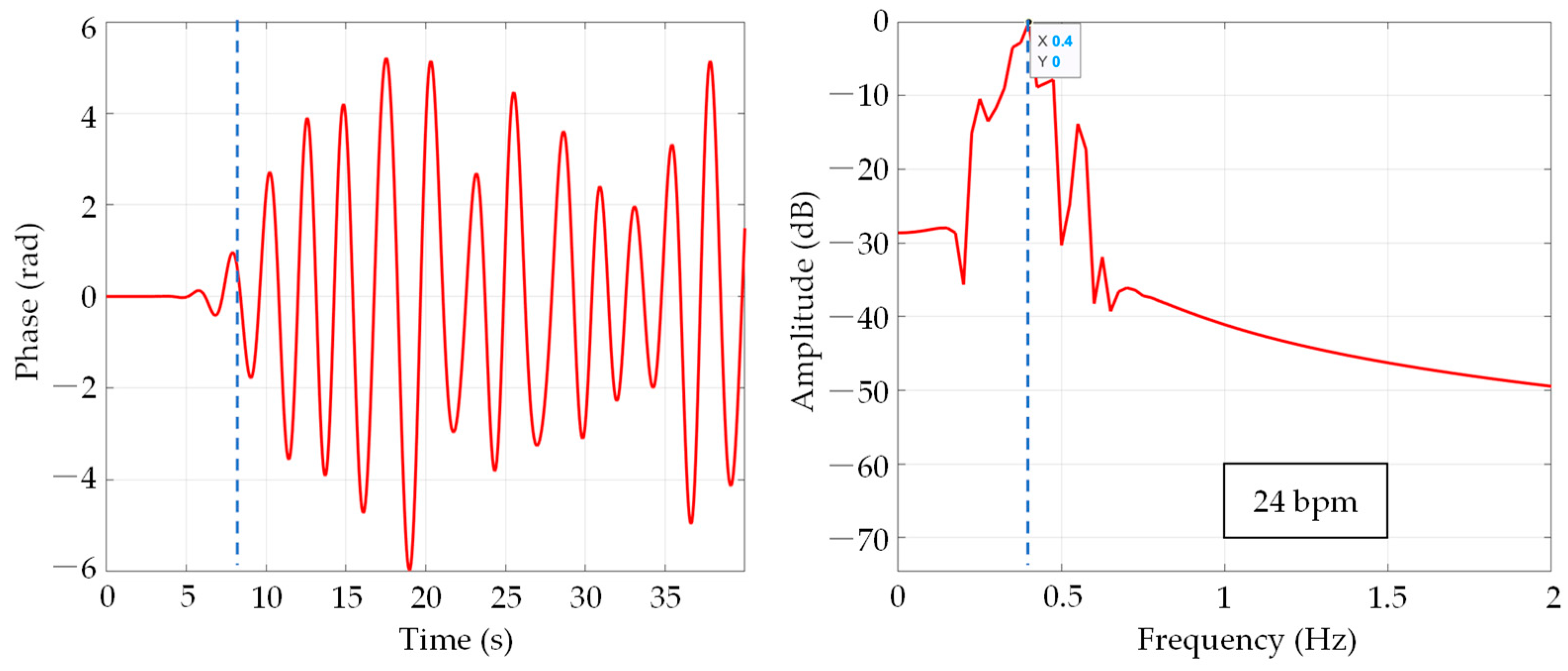
- Combining the sensing requirements on construction sites with the major applications of 4D mmw technology, the potential applications of this technology in the construction industry are discussed. It is believed that site monitoring is where 4D mmw-based sensing will be most highly regarded, acting as a powerful complement to the prevailing camera surveillance on construction sites to monitor the positions and recognize the activities of workers and heavy equipment. Secondly, the excellent imaging capability of 4D mmw radars allow for the rebuilding of the 3D construction site environments, thus aiding safety management and progress. Additionally, the micro-Doppler effect of mmw signals can be used to monitor the health status of workers by detecting their heart rate and respiration.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Awolusi, I.; Nnaji, C.; Marks, E.; Hallowell, M. Enhancing Construction safety monitoring through the application of internet of things and wearable sensing devices: A review. In Computing in Civil Engineering 2019; American Society of Civil Engineers: Atlanta, GA, USA, 13 June 2019; pp. 530–538. [Google Scholar]
- Zhang, Y.; Chen, J.; Han, S.; Li, B. Big data-based performance analysis of tunnel boring machine tunneling using deep learning. Buildings 2022, 12, 1567. [Google Scholar] [CrossRef]
- Kanan, R.; Elhassan, O.; Bensalem, R. An IoT-based autonomous system for workers’ safety in construction sites with real-time alarming, monitoring, and positioning strategies. Autom. Constr. 2018, 88, 73–86. [Google Scholar] [CrossRef]
- Guo, H.; Yu, Y.; Xiang, T.; Li, H.; Zhang, D. The Availability of Wearable-device-based physical data for the measurement of construction workers’ psychological status on site: From the perspective of safety management. Autom. Constr. 2017, 82, 207–217. [Google Scholar] [CrossRef]
- Zhang, R.; Jing, X.; Wu, S.; Jiang, C.; Mu, J.; Yu, F.R. Device-Free Wireless sensing for human detection: The deep learning perspective. IEEE Internet Things J. 2021, 8, 2517–2539. [Google Scholar] [CrossRef]
- Faulkner, N.; Konings, D.; Alam, F.; Legg, M.; Demidenko, S. Machine learning techniques for device-free localization using low-resolution thermopiles. IEEE Internet Things J. 2022, 9, 18681–18694. [Google Scholar] [CrossRef]
- Jeelani, I.; Asadi, K.; Ramshankar, H.; Han, K.; Albert, A. Real-time vision-based worker localization & hazard detection for construction. Autom. Constr. 2021, 121, 103448. [Google Scholar] [CrossRef]
- Zhang, S.; Meng, W.; Li, H.; Cui, X. Multimodal spatiotemporal networks for sign language recognition. IEEE Access 2019, 7, 180270–180280. [Google Scholar] [CrossRef]
- Zhou, T.; Yang, M.; Jiang, K.; Wong, H.; Yang, D. MMW radar-based technologies in autonomous driving: A review. Sensors 2020, 20, 7283. [Google Scholar] [CrossRef]
- Rao, A.S.; Radanovic, M.; Liu, Y.; Hu, S.; Fang, Y.; Khoshelham, K.; Palaniswami, M.; Ngo, T. Real-time monitoring of construction sites: Sensors, methods, and applications. Autom. Constr. 2022, 136, 104099. [Google Scholar] [CrossRef]
- van Berlo, B.; Elkelany, A.; Ozcelebi, T.; Meratnia, N. Millimeter Wave Sensing: A review of application pipelines and building blocks. IEEE Sens. J. 2021, 21, 10332–10368. [Google Scholar] [CrossRef]
- Ren, W.; Qi, F.; Foroughian, F.; Kvelashvili, T.; Liu, Q.; Kilic, O.; Long, T.; Fathy, A.E. Vital sign detection in any orientation using a distributed radar network via modified independent component analysis. IEEE Trans. Microw. Theory Tech. 2021, 69, 4774–4790. [Google Scholar] [CrossRef]
- Wang, X.; Kong, L.; Kong, F.; Qiu, F.; Xia, M.; Arnon, S.; Chen, G. Millimeter wave communication: A comprehensive survey. IEEE Commun. Surv. Tutor. 2018, 20, 1616–1653. [Google Scholar] [CrossRef]
- Song, Y.; Jin, T.; Dai, Y.; Song, Y.; Zhou, X. Through-Wall human pose reconstruction via UWB MIMO radar and 3D CNN. Remote Sens. 2021, 13, 241. [Google Scholar] [CrossRef]
- Patel, V.M.; Mait, J.N.; Prather, D.W.; Hedden, A.S. Computational millimeter wave imaging: Problems, progress, and prospects. IEEE Signal Process. Mag. 2016, 33, 109–118. [Google Scholar] [CrossRef]
- Venon, A.; Dupuis, Y.; Vasseur, P.; Merriaux, P. Millimeter Wave FMCW RADARs for Perception, Recognition and Localization in Automotive Applications: A Survey. IEEE Trans. Intell. Veh. 2022, 7, 533–555. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, P.; He, N.; He, Z. Super Resolution DOA Based on relative motion for fmcw automotive radar. IEEE Trans. Veh. Technol. 2020, 69, 8698–8709. [Google Scholar] [CrossRef]
- Zhang, W.; Martinez-Lorenzo, J.A. Toward 4-D imaging of on-the-move object at 2500 volumetric frames per second by software-defined millimeter-wave MIMO with compressive reflector antenna. IEEE Trans. Microw. Theory Tech. 2023, 71, 1337–1347. [Google Scholar] [CrossRef]
- Bai, J.; Li, S.; Tan, B.; Zheng, L.; Huang, L.; Dong, L. Traffic participants classification based on 3d radio detection and ranging point clouds. IET Radar Sonar Navig. 2022, 16, 278–290. [Google Scholar] [CrossRef]
- Li, T.; Zhao, Z.; Luo, Y.; Ruan, B.; Peng, D.; Cheng, L.; Shi, C. Gait recognition using spatio-temporal information of 3D point cloud via millimeter wave radar. Wirel. Commun. Mob. Comput. 2022, 2022, 4555136. [Google Scholar] [CrossRef]
- Kedzia, J.C.; Strand, B.; Abenius, E. Simulation of automotive radar sensors extended to 77 GHz long range detection. In GeMiC 2014: German Microwave Conference; VDE Verlag GmbH: Aachen, Germany, 2019. [Google Scholar]
- Liu, Y.; Liu, Y. A data fusion model for millimeter-wave radar and vision sensor in advanced driving assistance system. Int. J Automot. Technol. 2021, 22, 1695–1709. [Google Scholar] [CrossRef]
- Maruta, K.; Takizawa, M.; Fukatsu, R.; Wang, Y.; Li, Z.; Sakaguchi, K. Blind-Spot visualization via AR glasses using millimeter-wave v2x for safe driving. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27 September–1 October 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; Volume 2021. [Google Scholar]
- Long, T.; Li, Y.; Zhang, W.; Liu, Q.; Chen, X.; Tian, W.; Yang, X. Wideband Radar System Applications. In Wideband Radar; Springer Nature: Singapore, 2022; pp. 173–197. [Google Scholar]
- Gu, Y.; Meng, S.; Shi, K. Radar-enhanced image fusion-based object detection for autonomous driving. In Proceedings of the 2022 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 25–27 October 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar]
- Bai, J.; Zheng, L.; Li, S.; Tan, B.; Chen, S.; Huang, L. Radar transformer: An object classification network based on 4D mmw imaging radar. Sensors 2021, 21, 3854. [Google Scholar] [CrossRef]
- Paek, D.H.; Kong, S.H.; Wijaya, K.T. K-Radar: 4D radar object detection for autonomous driving in various weather conditions. In Proceedings of the Thirty-Sixth Conference on Neural Information Processing Systems Datasets and Benchmarks Track 2022, Virtual, 28 November 2022; pp. 1–11. [Google Scholar]
- Dalbah, Y.; Lahoud, J.; Cholakkal, H. RadarFormer: Lightweight and accurate real-time radar object detection model. In Image Analysis: 23rd Scandinavian Conference, SCIA 2023, Sirkka, Finland, 18–21 April 2023, Proceedings, Part I; Springer Nature: Cham, Switzerland, 2023; pp. 341–358. [Google Scholar]
- Jiang, M.; Xu, G.; Pei, H.; Feng, Z.; Ma, S.; Zhang, H.; Hong, W. 4D High-resolution imagery of point clouds for automotive MmWave radar. IEEE Trans. Intell. Transp. Syst. 2023, 1–15. [Google Scholar] [CrossRef]
- Konev, S.; Brodt, K.; Sanakoyeu, A. MotionCNN: A strong baseline for motion prediction in autonomous driving. arXiv 2022, arXiv:2206.02163. [Google Scholar]
- Wang, Y.; Guan, Y.; Li, S.; Wu, J.; Cheng, H. Fusion perception of vision and millimeter wave radar for autonomous driving. In Proceedings of the 8th International Conference on Computing and Artificial Intelligence 2022, Tianjin, China, 18–21 March 2022; pp. 767–772. [Google Scholar] [CrossRef]
- Sun, B.; Gao, S.; Zi, H.; Wu, Q. GAN based simultaneous localization and mapping framework in dynamic environment. J. King Saud Univ. Sci. 2022, 34, 102298. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Wang, Y.; Lin, Y.; Shen, W. The millimeter-wave radar slam assisted by the RCS feature of the target and IMU. Sensors 2020, 20, 5421. [Google Scholar] [CrossRef] [PubMed]
- Dang, X.; Rong, Z.; Liang, X. Sensor fusion-based approach to eliminating moving objects for slam in dynamic environments. Sensors 2021, 21, 230. [Google Scholar] [CrossRef] [PubMed]
- Dang, X.; Liang, X.; Li, Y.; Rong, Z. Moving objects elimination towards enhanced dynamic SLAM fusing LiDAR and MmW-Radar. In Proceedings of the 2020 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Linz, Austria, 23 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Ha, U.; Assana, S.; Adib, F. Contactless seismocardiography via deep learning radars. In Proceedings of the 26th Annual International Conference on Mobile Computing and Networking 2020, London, UK, 21–25 September 2020; pp. 1–14. [Google Scholar] [CrossRef]
- Li, Y.; Gu, C.; Mao, J.F. A 4D gesture sensing technique based on spatiotemporal detection with a 60 GHz FMCW MIMO Radar. In Proceedings of the 2021 IEEE MTT-S International Microwave Symposium (IMS), Atlanta, GA, USA, 6–11 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 462–465. [Google Scholar]
- Feng, Y.; Wang, C.; Xie, L.; Lu, S. A fine-grained gesture tracking system based on millimeter-wave. CCF Trans. Pervasive. Comp. Interact. 2022, 4, 357–369. [Google Scholar] [CrossRef]
- Chen, Q.; Li, Y.; Cui, Z.; Cao, Z. A hand gesture recognition method for Mmwave radar based on angle-range joint temporal feature. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; Institute of Electrical and Electronics Engineers Inc. (IEEE): Piscataway, NJ, USA, 2022; pp. 2650–2653. [Google Scholar]
- Li, W.; Jiang, J.; Yao, Y.; Liu, D.; Gao, Y.; Li, Q. Hand character gesture recognition based on a single millimetre-wave radar chip. IET Radar Sonar Navig. 2022, 16, 208–223. [Google Scholar] [CrossRef]
- Xie, H.; Han, P.; Li, C.; Chen, Y.; Zeng, S. Lightweight midrange arm-gesture recognition system from MmWave radar point clouds. IEEE Sens. J. 2023, 23, 1261–1270. [Google Scholar] [CrossRef]
- Xia, Z.; Luomei, Y.; Zhou, C.; Xu, F. Multidimensional feature representation and learning for robust hand-gesture recognition on commercial millimeter-wave radar. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4749–4764. [Google Scholar] [CrossRef]
- Palipana, S.; Salami, D.; Leiva, L.A.; Sigg, S. Pantomime: Mid-air gesture recognition with sparse millimeter-wave radar point clouds. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2021, 5, 1–27. [Google Scholar] [CrossRef]
- Hazra, S.; Santra, A. Short-range radar-based gesture recognition system using 3D CNN with triplet loss. IEEE Access 2019, 7, 125623–125633. [Google Scholar] [CrossRef]
- Zhang, G.; Lan, S.; Zhang, K.; Ye, L. Temporal-range-doppler features interpretation and recognition of hand gestures using MmW FMCW radar sensors. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar]
- Zhao, Y.; Yarovoy, A.; Fioranelli, F. Angle-insensitive human motion and posture recognition based on 4D imaging radar and deep learning classifiers. IEEE Sens. J. 2022, 22, 12173–12182. [Google Scholar] [CrossRef]
- Kong, H.; Xu, X.; Yu, J.; Chen, Q.; Ma, C.; Chen, Y.; Chen, Y.C.; Kong, L. M3Track: MmWave-based multi-user 3D posture tracking. In Proceedings of the 20th Annual International Conference on Mobile Systems, Applications and Services 2022, Portland, Oregon, 27 June–1 July 2022; pp. 491–503. [Google Scholar]
- Wu, J.; Cui, H.; Dahnoun, N. A voxelization algorithm for reconstructing MmWave radar point cloud and an application on posture classification for low energy consumption platform. Sustainability 2023, 15, 3342. [Google Scholar] [CrossRef]
- Sengupta, A.; Jin, F.; Zhang, R.; Cao, S. Mm-Pose: Real-time human skeletal posture estimation using MmWave radars and CNNs. IEEE Sens. J. 2020, 20, 10032–10044. [Google Scholar] [CrossRef]
- Lai, J.; Sun, Y.; Luo, Z.; Yang, Y. 3D printed lens antenna for contactless heartbeat and respiration detection using Mm-wave radar sensing. In Proceedings of the 2022 IEEE MTT-S International Microwave Biomedical Conference (IMBioC), Suzhou, China, 16–18 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 180–182. [Google Scholar]
- Wu, J.; Dahnoun, N. A health monitoring system with posture estimation and heart rate detection based on millimeter-wave radar. Microprocess. Microsyst. 2022, 94, 104670. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, S.; Xiao, W. Non-contact vital signs detection using Mm-wave radar during random body movements. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1244–1249. [Google Scholar]
- Shah, S.A.; Shah, S.Y.; Shah, S.I.; Haider, D.; Tahir, A.; Ahmad, J. Identifying elevated and shallow respiratory rate using MmWave radar leveraging machine learning algorithms. In Proceedings of the 2019 International Conference on Advances in the Emerging Computing Technologies (AECT) 2020, Al Madinah Al Munawwarah, Saudi Arabia, 10 February 2020; pp. 1–4. [Google Scholar]
- Prat, A.; Blanch, S.; Aguasca, A.; Romeu, J.; Broquetas, A. Collimated beam FMCW radar for vital sign patient monitoring. IEEE Trans. Antennas Propag. 2019, 67, 5073–5080. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Zhang, X.; Xv, B.; Zhang, J.; Fu, R.; Wang, X.; Zhu, L.; Ren, H.; Lu, P.; Li, J.; et al. InterFusion: Interaction-based 4D radar and LiDAR fusion for 3D object detection. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 12247–12253. [Google Scholar]
- Cheng, Y.; Su, J.; Jiang, M.; Liu, Y. A novel radar point cloud generation method for robot environment perception. IEEE Trans. Robot. 2022, 38, 3754–3773. [Google Scholar] [CrossRef]
- Wu, J.; Gao, J.; Yi, J.; Liu, P.; Xu, C. Environment perception technology for intelligent robots in complex environments: A Review. In Proceedings of the 2022 7th International Conference on Communication, Image and Signal Processing (CCISP), Chengdu, China, 18–20 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 479–485. [Google Scholar]
- Cheng, Y.; Pang, C.; Jiang, M.; Liu, Y. Relocalization based on millimeter wave radar point cloud for visually degraded environments. J. Field Robot. 2023, 40, 901–918. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, T.; Zhu, S. A novel tracking system for human following robots with fusion of MMW radar and monocular vision. Ind. Robot. Int. J. Robot. Res. Appl. 2022, 49, 120–131. [Google Scholar] [CrossRef]
- Kramer, A.; Stahoviak, C.; Santamaria-Navarro, A.; Agha-Mohammadi, A.; Heckman, C. Radar-inertial Ego-velocity estimation for visually degraded environments. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May 31–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 5739–5746. [Google Scholar]
- Gui, S.; Yang, Y.; Li, J.; Zuo, F.; Pi, Y. THz radar security screening method for walking human torso with multi-angle synthetic aperture. IEEE Sens. J. 2021, 21, 17962–17972. [Google Scholar] [CrossRef]
- Nithin, S.B. Researching Feasibility of MmWave Solutions for Insect Detection Applications. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2021. [Google Scholar]
- Noskov, A.; Bendix, J.; Friess, N. A review of insect monitoring approaches with special reference to radar techniques. Sensors 2021, 21, 1474. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Guo, J.; He, Y.; Jin, M.; Li, S.; Liu, Y. MmVib: Micrometer-level vibration measurement with Mmwave radar. In Proceedings of the 26th Annual International Conference on Mobile Computing and Networking, London, UK, 21–25 September 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 1–13. [Google Scholar]
- Luo, X.; Li, H.; Yang, X.; Yu, Y.; Cao, D. Capturing and understanding workers’ activities in far-field surveillance videos with deep action recognition and bayesian nonparametric learning. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 333–351. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, H.; Li, H. Computer vision-based recognition of 3D relationship between construction entities for monitoring struck-by accidents. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 1023–1038. [Google Scholar] [CrossRef]
- Arashpour, M.; Ngo, T.; Li, H. Scene understanding in construction and buildings using image processing methods: A comprehensive review and a case study. J. Build. Eng. 2021, 33, 101672. [Google Scholar] [CrossRef]
- Liu, Z.; Kim, D.; Lee, S.; Zhou, L.; An, X.; Liu, M. Near Real-time 3D reconstruction and quality 3d point cloud for time-critical construction monitoring. Buildings 2023, 13, 464. [Google Scholar] [CrossRef]
- Li, H.; Lu, M.; Hsu, S.C.; Gray, M.; Huang, T. Proactive behavior-based safety management for construction safety improvement. Saf. Sci. 2015, 75, 107–117. [Google Scholar] [CrossRef]
- Wang, M.; Wei, S.; Liang, J.; Liu, S.; Shi, J.; Zhang, X. Lightweight FISTA-Inspired sparse reconstruction network for mmw 3-D holography. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–20. [Google Scholar] [CrossRef]
- Sun, Y.; Huang, Z.; Zhang, H.; Cao, Z.; Xu, D. 3DRIMR: 3D reconstruction and imaging via mmwave radar based on deep learning. In Proceedings of the 2021 IEEE International Performance, Computing, and Communications Conference (IPCCC), Austin, TX, USA, 29–31 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–8. [Google Scholar]
- Watts, C.M.; Pedross-Engel, A.; Reynolds, M.S. Through-wall k-Band and v-Band synthetic aperture radar imaging of building structures and utility infrastructure. In Passive and Active Millimeter-Wave Imaging XXII; SPIE: Bellingham, WA, USA, 2019; Volume 10994, pp. 68–77. [Google Scholar]
- Yang, Z.; Zhu, Z. An Ego-motion estimation method using millimeter-wave radar in 3D scene reconstruction. In Proceedings of the 2022 14th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 20–21 August 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 18–21. [Google Scholar]
- Xing, X.; Li, H.; Li, J.; Zhong, B.; Luo, H.; Skitmore, M. A Multicomponent and neurophysiological intervention for the emotional and mental states of high-altitude construction workers. Autom. Constr. 2019, 105, 102836. [Google Scholar] [CrossRef]
- Ahn, C.R.; Lee, S.; Sun, C.; Jebelli, H.; Yang, K.; Choi, B. Wearable sensing technology applications in construction safety and health. J. Constr. Eng. Manag. 2019, 145, 03119007. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.; Zhou, M.; Ren, A.; Tian, Z. Remote monitoring of human vital signs based on 77-GHz Mm-Wave FMCW radar. Sensors 2020, 20, 2999. [Google Scholar] [CrossRef] [PubMed]
- Vorobyov, A.; Daskalaki, E.; Roux, E.L.; Farserotu, J.; Dallemagne, P. Contactless vital signs sensing: A survey, preliminary results and challenges. In Proceedings of the 2020 XXXIIIrd General Assembly and Scientific Symposium of the International Union of Radio Science, Rome, Italy, 29 August–5 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar]
- Jardak, S.; Alouini, M.-S.; Kiuru, T.; Metso, M.; Ahmed, S. Compact MmWave FMCW radar: Implementation and performance analysis. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 36–44. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, Y.D. 4D automotive radar sensing for autonomous vehicles: A sparsity-oriented approach. IEEE J. Sel. Top. Signal Process. 2021, 15, 879–891. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Limitations |
|---|---|
| Camera | The accuracy and reliability highly depend on light and weather conditions; and it is weak in spatial sensing. |
| LiDAR | It is prone to interference in poor weather conditions such as rain or snow; and the cost is high. |
| Depth camera | It can only measure within a certain range (several meters), and is susceptible to noise and interference. |
| Ultrasonic sensor | It has a limited range and low measuring speed, and can be affected by ambient noise. |
| Infrared sensor | The accuracy is generally low and susceptible to interference; the sensing range typically falls within several meters; and the sensitivity can be influenced by material properties. |
| Unified Term/Alias | Included Keywords |
|---|---|
| mmw | millimeter wave, millimetre wave, millimeter-wave, millimeter wave (mmw), millimeter waves, millimeter-wave (mm-wave), etc. |
| 3D imaging | 3-D imaging, three-dimensional imaging, 3D radar imaging, etc. |
| autonomous driving | autonomous driving (ad), autonomous vehicle, automotive, etc. |
| No. | Mean Year | Top Terms (Log-Likelihood Ratio) |
|---|---|---|
| 34 | 2021 | 3D sar; perceptual learning framework; adaptive sparse; mmbody benchmark; 3D body reconstruction dataset |
| 25 | 2020 | mmwave radar point cloud; lightweight midrange arm-gesture recognition system; natural language; processing approach |
| 25 | 2021 | camera feature; multi-modal fusion; view disparity; vision fusion; object detection |
| 22 | 2020 | support measurement; sensing design; ris-assisted wireless network; coal mine safety monitoring; joint communication |
| 21 | 2020 | contactless electrocardiogram monitoring; human activity recognition; multi-person gait recognition; spatio-temporal information; point-cloud |
| 21 | 2020 | car interior radar; advanced life-signs detection; robust hand-gesture recognition; hand gesture |
| 20 | 2020 | automotive mmwave radar; point cloud; using 3D-printed helix antenna; circular polarization; epoxy wedge |
| 7 | 2022 | radar point cloud; visual information fusion; center transfuser; 3D object detection |
| Keywords | Year | Strength | Begin | End | 2019–2023 |
|---|---|---|---|---|---|
| 2019–2023 | 2019 | 2.13 | 2019 | 2020 |  |
| 5 g mobile communication system | 2019 | 1.22 | 2019 | 2020 |  |
| Nondestructive examination | 2019 | 1.11 | 2019 | 2020 |  |
| 4D mmw radar technology | 2019 | 1.03 | 2019 | 2019 |  |
| Convolutional neural network | 2020 | 1.71 | 2020 | 2019 |  |
| Skeletal tracking | 2020 | 1.09 | 2020 | 2021 |  |
| Indoor localization | 2020 | 1.09 | 2020 | 2020 |  |
| Vehicle detection | 2020 | 1.09 | 2020 | 2020 |  |
| Lidar | 2021 | 1.67 | 2021 | 2021 |  |
| Autonomous driving | 2021 | 1.24 | 2021 | 2021 |  |
| Sensor fusion | 2021 | 0.96 | 2021 | 2021 |  |
| Graph neural networks | 2021 | 0.87 | 2021 | 2021 |  |
| Multi sensor fusion | 2021 | 0.87 | 2021 | 2021 |  |
| Multi target tracking | 2021 | 0.87 | 2021 | 2021 |  |
| Radar sensing | 2021 | 0.87 | 2021 | 2021 |  |
| Machine learning | 2022 | 1.79 | 2022 | 2023 |  |
| Wireless sensing | 2022 | 1.07 | 2022 | 2023 |  |
| Scattering | 2022 | 0.71 | 2022 | 2023 |  |
| Posture estimation | 2022 | 0.71 | 2022 | 2023 |  |
| Package | 2022 | 0.71 | 2022 | 2023 |  |
| Point cloud data | 2022 | 0.71 | 2022 | 2023 |  |
| Multimodal fusion | 2022 | 0.71 | 2022 | 2023 |  |
| Dataset | 2022 | 0.71 | 2022 | 2023 |  |
| Robot sensing systems | 2022 | 0.71 | 2022 | 2023 |  |
| Mapping | 2022 | 0.71 | 2022 | 2023 |  |
| Sensing Requirements on Construction Sites | Reasons | |
|---|---|---|
| Construction site monitoring | Position and trajectory of worker | S |
| Position and trajectory of equipment | S, P1 | |
| Activity of worker | S, P1 | |
| Activity of equipment | S, P1 | |
| Operation status | P1 | |
| Health monitoring | Health status of workers (heart rate, respiration, etc.) | S |
| Environment understanding | Environment (noise, air quality, etc.) | S |
| Environment 3D modelling | S, P2 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Zhang, J.; Shaikh, Z.S.; Wang, J.; Ren, W. Four-Dimensional (4D) Millimeter Wave-Based Sensing and Its Potential Applications in Digital Construction: A Review. Buildings 2023, 13, 1454. https://doi.org/10.3390/buildings13061454
Han S, Zhang J, Shaikh ZS, Wang J, Ren W. Four-Dimensional (4D) Millimeter Wave-Based Sensing and Its Potential Applications in Digital Construction: A Review. Buildings. 2023; 13(6):1454. https://doi.org/10.3390/buildings13061454
Chicago/Turabian StyleHan, Shuai, Jiawen Zhang, Zeeshan Shahid Shaikh, Jia Wang, and Wei Ren. 2023. "Four-Dimensional (4D) Millimeter Wave-Based Sensing and Its Potential Applications in Digital Construction: A Review" Buildings 13, no. 6: 1454. https://doi.org/10.3390/buildings13061454