1. Introduction
Moving load is the main external load acting on the bridge [
1,
2]. Due to the inefficient supervision of overweight vehicles, bridge collapse accidents caused by overweight vehicles have occurred occasionally in recent years [
3,
4,
5]. Therefore, the accurate and rapid recognition of moving loads is beneficial to the early warning and control of the overweight vehicle, thereby ensuring the safe operation of the bridge [
6,
7]. Traditional moving loads identification method primarily rely on a bridge weigh-in-motion (WIM) system. However, WIM may harm the road surface, and the sensor is prone to be damaged under long-term moving load, which increases the operation and maintenance costs [
8]. Therefore, it is urgent to indirectly identify the moving load using the dynamic response by a more efficient and economic method, i.e., moving load identification (MLI) methods.
MLI methods can roughly be classified into two categories, i.e., intelligent optimization methods and machine learning methods. Among them, intelligent optimization methods compute the optimal solution of the loss function to obtain the load parameters with the smallest loss function [
9]. For example, Wang et al. [
10] applied simulated annealing algorithm to identify multi-axis moving train loads, and the experimental results demonstrated that the proposed method exhibits excellent robustness and accuracy. Pan et al. [
11] proposed a moving loads identification method based on the firefly algorithm, in which, vehicle load information can be accurately identified with only a small number of sensors. Liu et al. [
12] recognized the constant component of the moving load with the help of particle swarm algorithm and used the hybrid measurement response to further improve the identification accuracy. Ali R. Vosoughi et al. [
13] applied a genetic algorithm for moving load identification by defining a root mean square error function between the measured and calculated responses, and the results showed that the accuracy and efficiency of this method higher than the Newmark’s method. Although the intelligent optimization methods can effectively obtain the moving load information from the bridge response, the optimization process often requires searching a huge solution space, which leads to computational inefficiency and is not conducive to the rapid identification of moving loads [
14].
With the rapid development of artificial intelligence, machine learning (especially deep learning) has shown great advantages in feature extraction, target detection, and recognition [
15], etc., and is also widely applied in moving load identification. For instance, Yang et al. [
16] applied a neural network to acquire the information of moving load through structural dynamic strain and discussed the influence of activation function on identification accuracy. Zhou et al. [
17] developed a moving load identification algorithm, which converted the bridge acceleration response into a two-dimensional map as the network input. Chen et al. [
18] reconstructed and located impact load based on deep convolution recurrent neural network and feature learning, which avoided the infeasibility and ill-posedness of nonlinear structure when identifying random impact loads. Zhang [
19] applied a long short-term memory neural network to obtain the information of moving loads through the dynamic responses of the bridge, and the results revealed that the information of the moving load can be recognized synchronously with great accuracy. The above literature confirms the great potential of machine learning methods in the accurate and efficient identification of moving loads. However, these machine learning methods often encounter a heavy computational burden, due to the large model parameters and complex network structure, which leads to an inefficient identification process.
Fortunately, lightweight convolutional neural network has a faster identification speed. Compared with traditional deep convolutional neural network models, separable convolution is used in lightweight convolutional neural network model, which greatly reduces the model parameters without sacrificing the accuracy of the model. As a lightweight convolutional neural network model with superior performance [
20], the MobileNetV2 model has not yet been used in moving load identification. Therefore, this paper proposes a moving load identification method based on MobileNetV2 and transfer learning, which has faster identification speed and requires less computing resource. Concretely, the continuous wavelet transform (CWT) is first applied to convert the dynamic responses of vehicle-bridge interaction (VBI) system into images to construct the data set for the moving load identification task. Secondly, a pre-trained MobileNetV2 model is applied to the load identification task through transfer learning strategy to enhance the efficiency of the model. Then, the information of moving loads can be acquired through inputting responses of bridge into the completely trained model. Finally, the feasibility of the method is demonstrated in the numerical modeling case.
The major contributions of this paper in comparison with the published literature are summarized in the following.
- (1)
MobileNetV2 has been introduced into moving load identification to improve the identification efficiency. Case study shows that the MobileNetV2 has faster identification speed and requires less computational resources than traditional deep convolutional neural network models in moving load identification.
- (2)
The influence of several types of dynamic response on moving loads identification is discussed. The results demonstrate that the displacement response may be the most suitable input for vehicle load identification, while acceleration response may be more suitable for vehicle speed identification, which provides a guideline for the accurate identification of moving loads.
This paper is organized as follows. In
Section 2, the theoretical background involved in this paper is introduced. In
Section 3, the process of this method is described. The case study of identification task is conducted in
Section 4. In
Section 5, the performance of this method is discussed and analyzed. In
Section 6, several conclusions are described.
4. Case Study
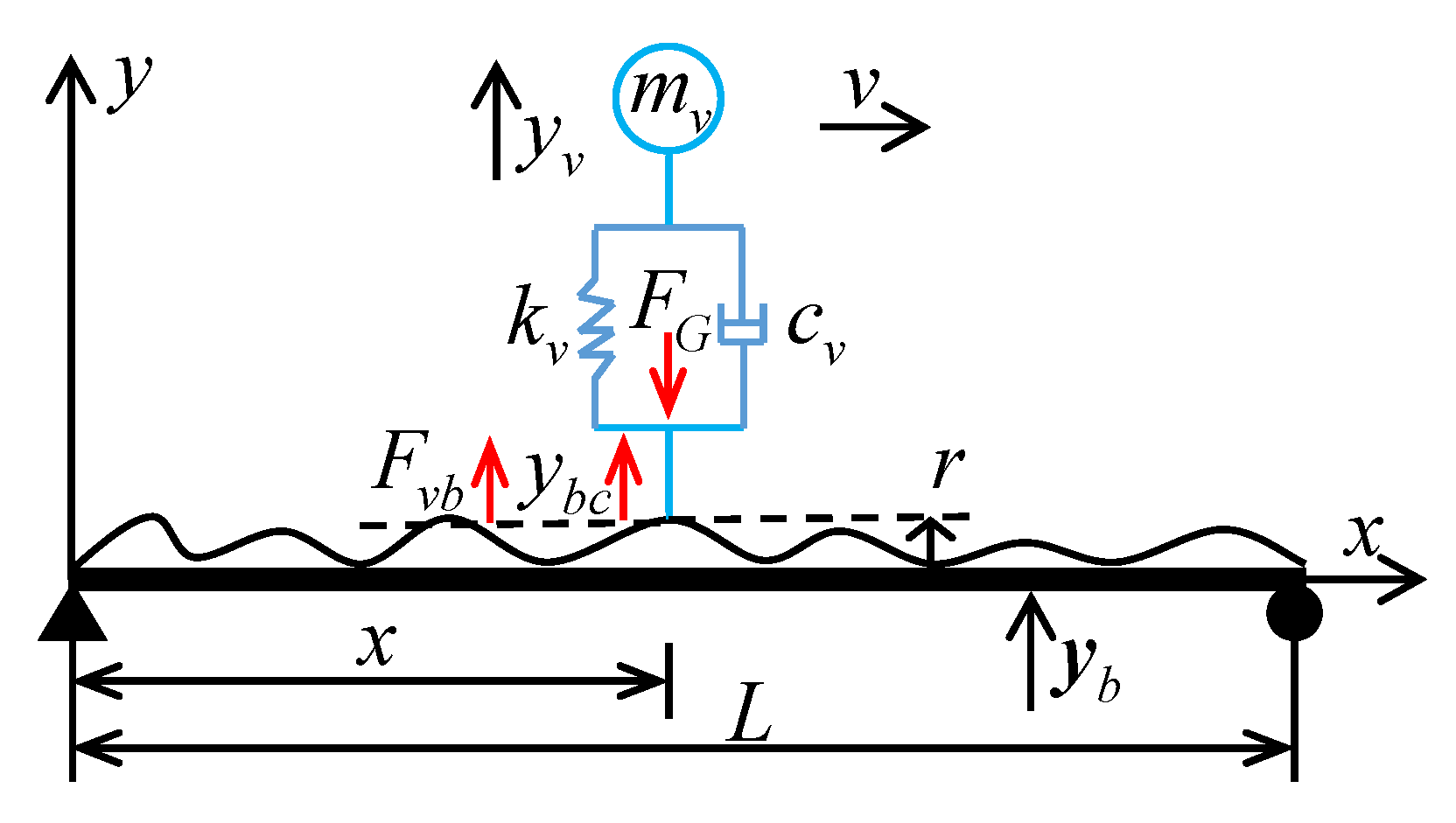
In order to verify the feasibility of the proposed method, the VBI system with single degree of freedom is taken as the object in this paper. According to the VBI dynamic equation, a sufficient sample database is constructed to perform moving load identification tasks.
4.1. The Numerical Model
In this paper, a 30 m concrete simply supported, single-span bridge is established to verify the method, as shown in
Figure 5. The main beam is simulated by beam188 element [
37,
38,
39] with concrete specification of C50. The elastic modulus is 3.40 × 10
4 MPa, and Poisson ratio is 0.2, mass density is 2600 kg/m
3. The single-wheeled vehicle model is simulated by spring element. The spring stiffness of vehicle is set to
and the damping of the vehicle is
. The information for the vehicle is designed according to the required load conditions.
4.2. Vehicle Weight Identification
Acquisition of vehicle weight information is critical to the safe operation of bridges. In this section, vehicle weight is classified into 5 categories from light to heavy (i.e., A, B, C, D, E), and the vehicle weight classification table is shown in
Table 1.
A total of 500 weight samples are randomly generated, including 100 samples per grade. Then, the bridge responses of each weight sample are calculated when both the speed and road roughness class are fixed. By the aforementioned preprocessing procedure, the response of the VBI dynamic system is converted into images, which were divided into training set, validation set and test set for model training, selection, and evaluation, respectively.
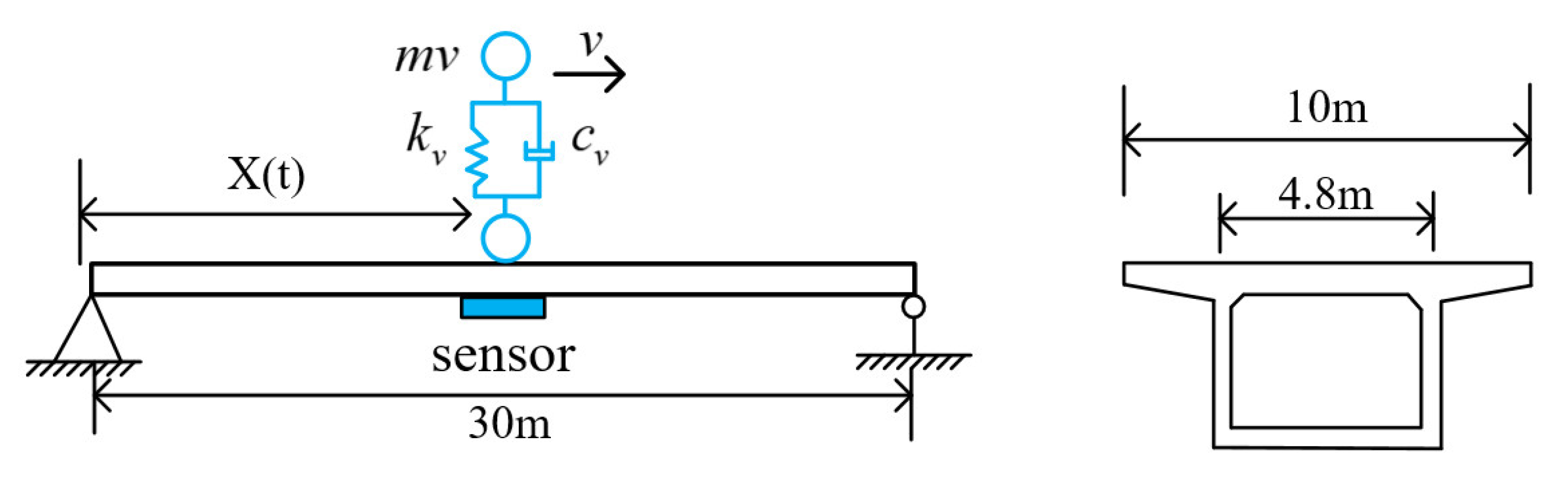
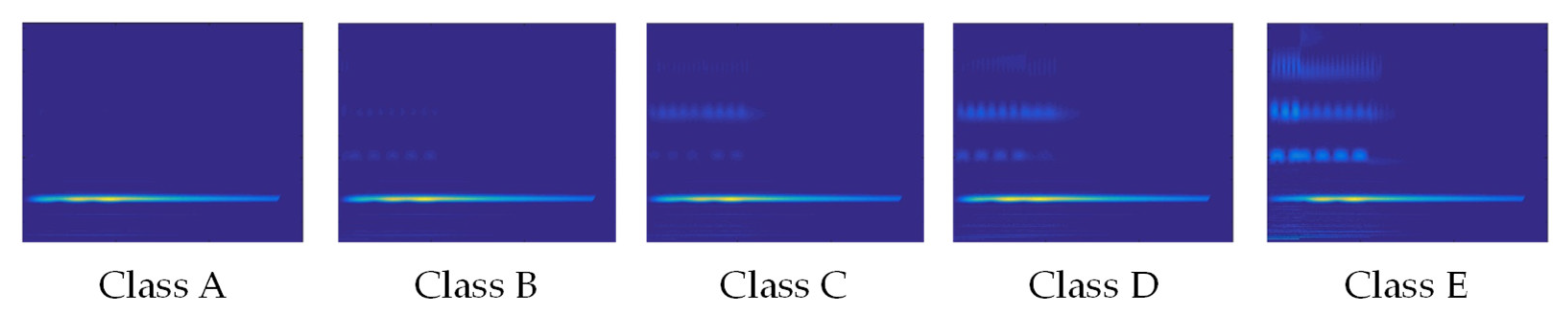
Figure 6 and
Figure 7 show the displacement sample and acceleration sample images corresponding to five randomly selected vehicle weights, respectively. Visible discrepancy can be observed from those images, which suggests the possibility of accurate identification results. Then, those samples are used as the input of the network model for model training and vehicle weight identification evaluation.
The trained MobileNetV2 model is used to identify vehicle weight information. Because the data characteristics of the target domain are quite different from those of the source domain, the MobileNetV2 model is transferred in the form of fine-tuning. The first 12th Bottlenecks of the MobileNetV2 model are frozen, the rest of the bottlenecks are retrained, and the original 1000-class target classifier are replaced with the 5-class target classifier required for moving load identification in this paper.
In this paper, the stochastic gradient descent algorithm is used to train the model. The learning rate is set to 0.0001. According to the scale of sample data, batch size is set to 64 and epoch is set to 50. Based on Pytorch 2.0, the MobileNetV2 model is trained under the operating system of Windows 10 and CPU of AMD Ryzen 53550H @ 2.10 GHz.
The accuracy and loss curves of the model training to convergence process are shown in
Figure 8, and the accuracy and loss at the end of training are shown in
Table 2. The vehicle weight is identified by using the test set samples. The identification results and confusion matrix are shown in
Table 3 and
Figure 8. After careful analysis of
Figure 8 and
Figure 9 and
Table 2 and
Table 3, the following conclusions can be drawn:
- (1)
The vehicle weight information can be accurately identified from the response samples. For example, it can be seen from
Figure 8 that, when the epoch is within 10, the accuracy curve and the loss curve of the training set and verification set input by all the sample change faster. When the epoch is within 10 and 50, the accuracy curve and the loss curve change slowly and gradually tend to be stable. From
Table 2, we can see that after the model training completed, the training set accuracy of each input is above 98%, in which the accuracy of the training set of both velocity sample input and acceleration response sample input reached 99%, the accuracy of the validation set of both displacement response sample input and velocity response sample input reached 98%, and the acceleration response sample input also reached 98.83%. It shows that the MobileNetV2 model trained by transfer learning can converge after less iterations. At the same time, the confusion matrix of the test results shows that the proposed method misclassifies only a small number of samples.
- (2)
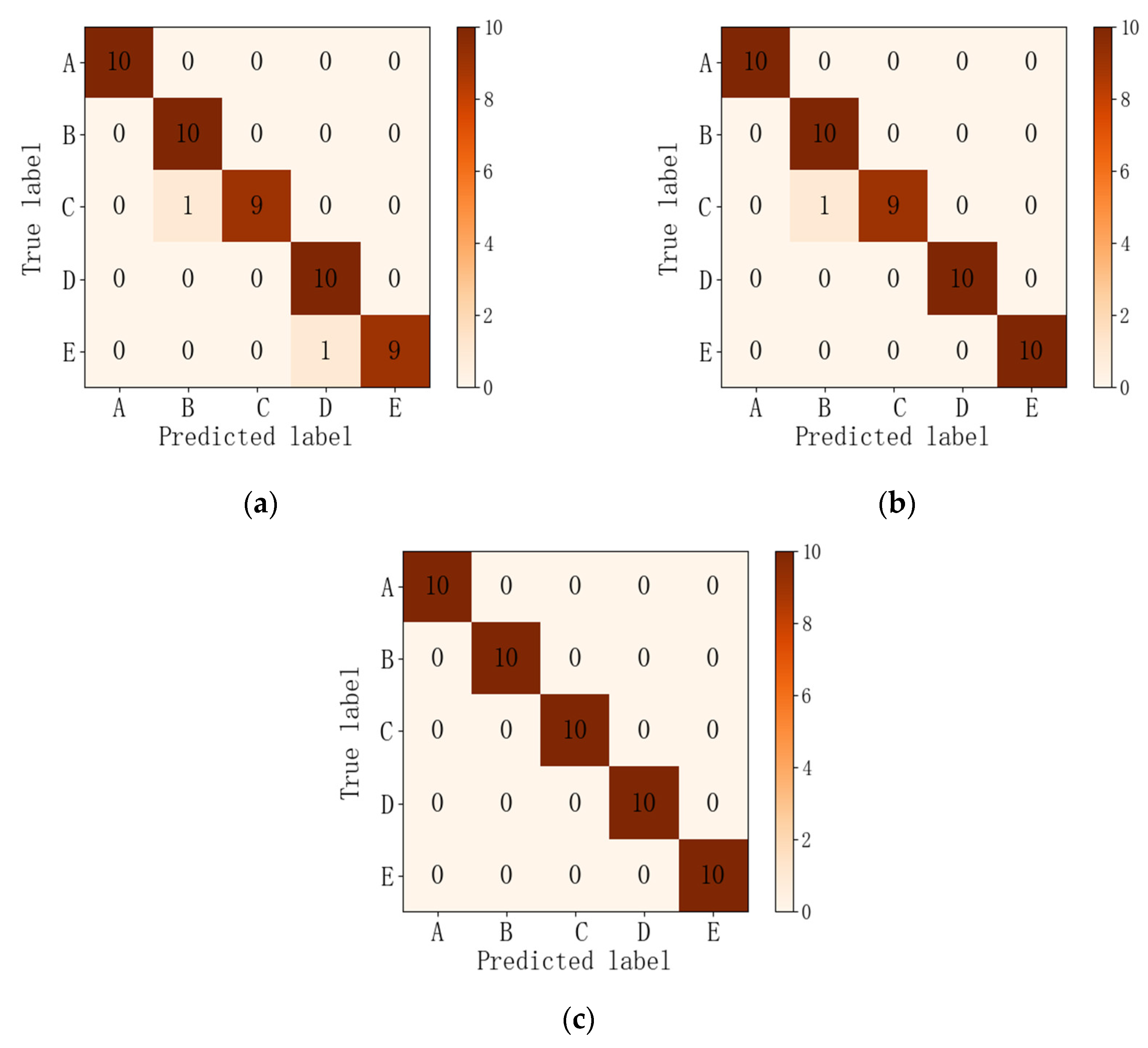
The displacement response sample has the best identification effect on vehicle weight identification tasks. From the test results in
Table 3, the identification accuracy using the displacement response is the highest, reaching 100%; the lowest identification accuracy of acceleration response is 96.08%. As can be seen from the confusion matrix in
Figure 9, the displacement response profile sample input accurately classifies all test samples, and both acceleration and velocity sample inputs misclassify only a small number of samples. The above analysis shows that the information of vehicle weight is most efficiently identified from displacement responses.
4.3. Vehicle Speed Identification
Acquisition of vehicle speed information is vital for control of vehicle overspeed. Therefore, this paper carries out a vehicle speed identification task to verify the performance of the proposed method in vehicle speed identification. Similar to vehicle weight identification, speed is divided into five grades from slow to fast (A, B, C, D, E). The speed classification table is shown in
Table 4.
Similarly, 500 speed samples are randomly generated, including 100 samples per grade. Then, based on the VBI dynamic equations, the responses of each speed sample are obtained in turn under the condition that the vehicle weight is class B, and the unevenness of the road surface is class B. Thus, the sample images are constructed according to the aforementioned strategy to generate a sample library for the vehicle speed identification task. Then, the samples are used as input to the network model for model training and evaluation of vehicle speed identification, respectively.
The accuracy and loss curves of the type training to convergence process are shown in
Figure 10. Accuracy and loss at the end of training are shown in
Table 5. The identification results and the confusion matrix are shown in
Table 6 and
Figure 11. After a detailed analysis of
Figure 10 and
Figure 11 and
Table 5 and
Table 6, the following conclusions can be drawn:
- (1)
The vehicle speed information can be accurately identified from response samples. For example, as can be seen in
Figure 10 and
Table 5 that the accuracy and loss of the training set, validation set of the proposed method are gradually stabilized after 10 epochs. The accuracy of each input training set reaches 99% after training, the loss of both the training and validation sets are within 0.03. At the same time, it can be seen from the test results and confusion matrix that this method misclassifies only a small number of samples. Those analysis demonstrate that the method has excellent performance in vehicle weight identification tasks.
- (2)
The acceleration response sample has the best identification effect on vehicle speed identification tasks. From the test results in
Table 6, the highest identification accuracy of 100% was achieved using acceleration response as input. It can be seen from the confusion matrix of
Figure 11 that all test samples are accurately classified by using acceleration response as input, and the information of vehicle speed is most efficiently identified from acceleration responses.
5. Discussion and Analysis
5.1. Comparison of Popular Network Models
To further validate the efficiency of the proposed method, the test results of MobileNetV2 model are compared with those of AlexNet, VGG16, and ResNet. Specifically, the above network models are transferred to identification tasks in the same fine-tuning form as the MobileNetV2 model. The acceleration samples are used as input on vehicle speed identification task, and the displacement samples are used as input on vehicle weight identification task. To compare the computational efficiency of the models, the training time complete 50 epochs, the weight file of model generated after identification of 50 samples in the test set, and the identification time for each model are compared.
The training results for vehicle weights identification task are shown in
Figure 12, After 50 epochs, the results of the identification of the test set are shown in
Table 7 and
Table 8. As can be seen from
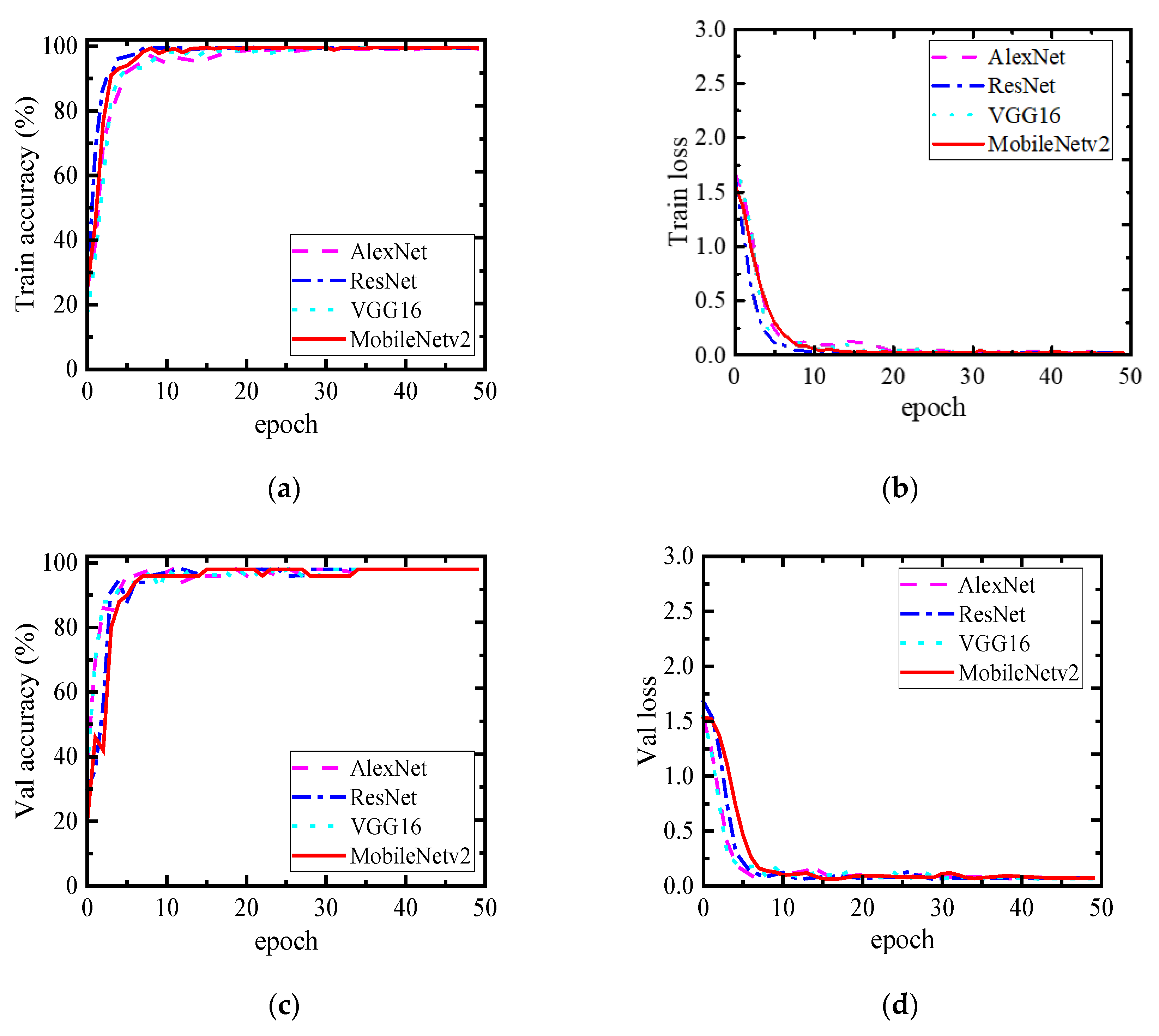
Figure 12, the MobileNetV2 model and each of the other models have converged after 50 epochs. As can be seen from
Table 7, the final accuracy of the training set is above 98% for MobileNetV2 and other models. For the final accuracy of the validation set, VGG16 model has the highest accuracy of 100%, AlexNet has the lowest accuracy of 94%, and MobileNetV2 and ResNet both reach 98%. For training time, MobileNetV2 takes 53 min to train, which is only 10% of VGG16 and 55% of AlexNet and ResNet. In terms of identification speed, MobileNetV2 took 11.04 s to identify 50 test samples, which was only 27.8% of VGG16, 44.3% of AlexNet, and 58.8% of ResNet.
Training results of vehicle speed identification task are shown in
Figure 13. The identification results of the test set after 50 epochs are shown in
Table 9 and
Table 10. From
Figure 13, it can be seen that the MobileNetV2 model and each of the other models have converged after 50 epochs, On the accuracy curves of the training and validation sets, ResNet and MobileNetV2 rise faster and fluctuate less, while AlexNet and VGG16 rise slower and fluctuate more. The accuracy of both the training and validation sets after training is 100% for MobileNetV2 and 98% for all the other three models. Based on the identification results in
Table 10, MobileNetV2 and VGG16 have the highest accuracy of 100%, while AlexNet has the lowest accuracy of 94%. The weight file size of MobileNetV2 is only 1.7% of VGG16, 3.9% of AlexNet, and 20% of ResNet, which has obvious advantages. In terms of identification speed, MobileNetV2 takes 9.58S to identify 50 test samples, which is only 24.8% of VGG16, 49.7% of AlexNet, and 50% of ResNet.
In summary, MobileNetV2 outperforms the other three models in both vehicle weight identification and vehicle speed identification tasks, in terms of identification accuracy. At the same time, MobileNetV2 is superior to other models in terms of training time and memory resource occupancy on the premise of ensuring accuracy. Additionally, MobileNetV2 has a major advantage in the speed of identification from the test set. It can be seen that this method has the best performance in terms of identification speed and accuracy, and the short training time and identification time make this method more suitable for practical applications.
5.2. Robustness Analysis
Anti-noise ability is a key basis for judging the practicability of the method. Therefore, this section evaluates its robustness by considering the measurement noise. In this paper, to simulate the actual test environment, the following noise levels of white noise were added to the sample data. In accordance with the implementation steps of the proposed method, the training and testing of the models for the two identification tasks were carried out under different noise levels, with the same transfer process and parameter settings as in the absence of noise; acceleration is used to identify vehicle speed, and displacement is used to identify vehicle weight.
The training results of the vehicle weight identification task are shown in
Figure 14. As can be seen from
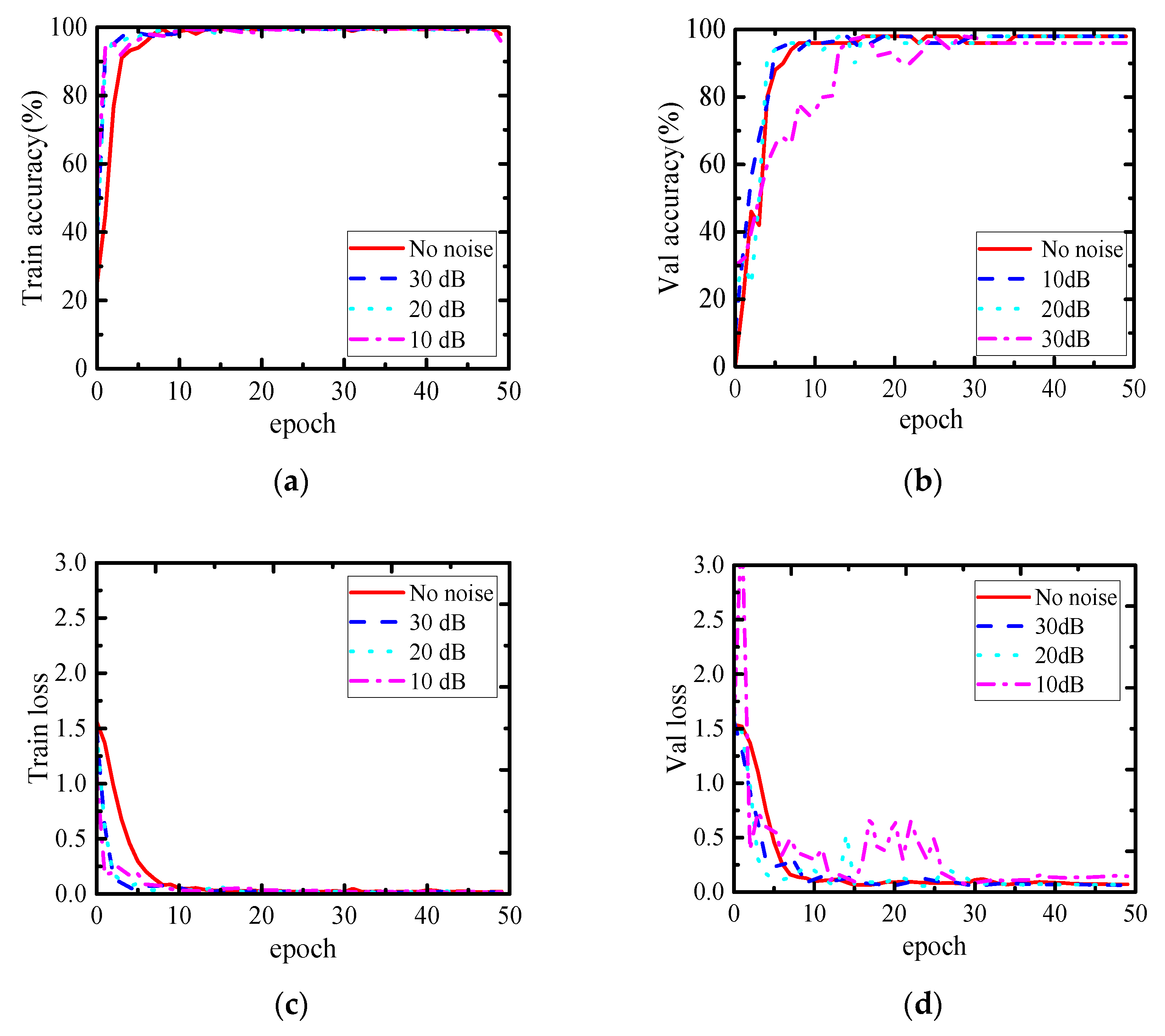
Figure 14, the accuracy and loss curves of the training set do not fluctuate much under different noise levels and the accuracy and loss curves of the validation set fluctuate in the first 20 epochs under 10 dB noise condition, but become smooth at 30 to 50 epochs. The models have converged after 50 epochs for different noise conditions.
The training results for the vehicle speed identification task are shown in
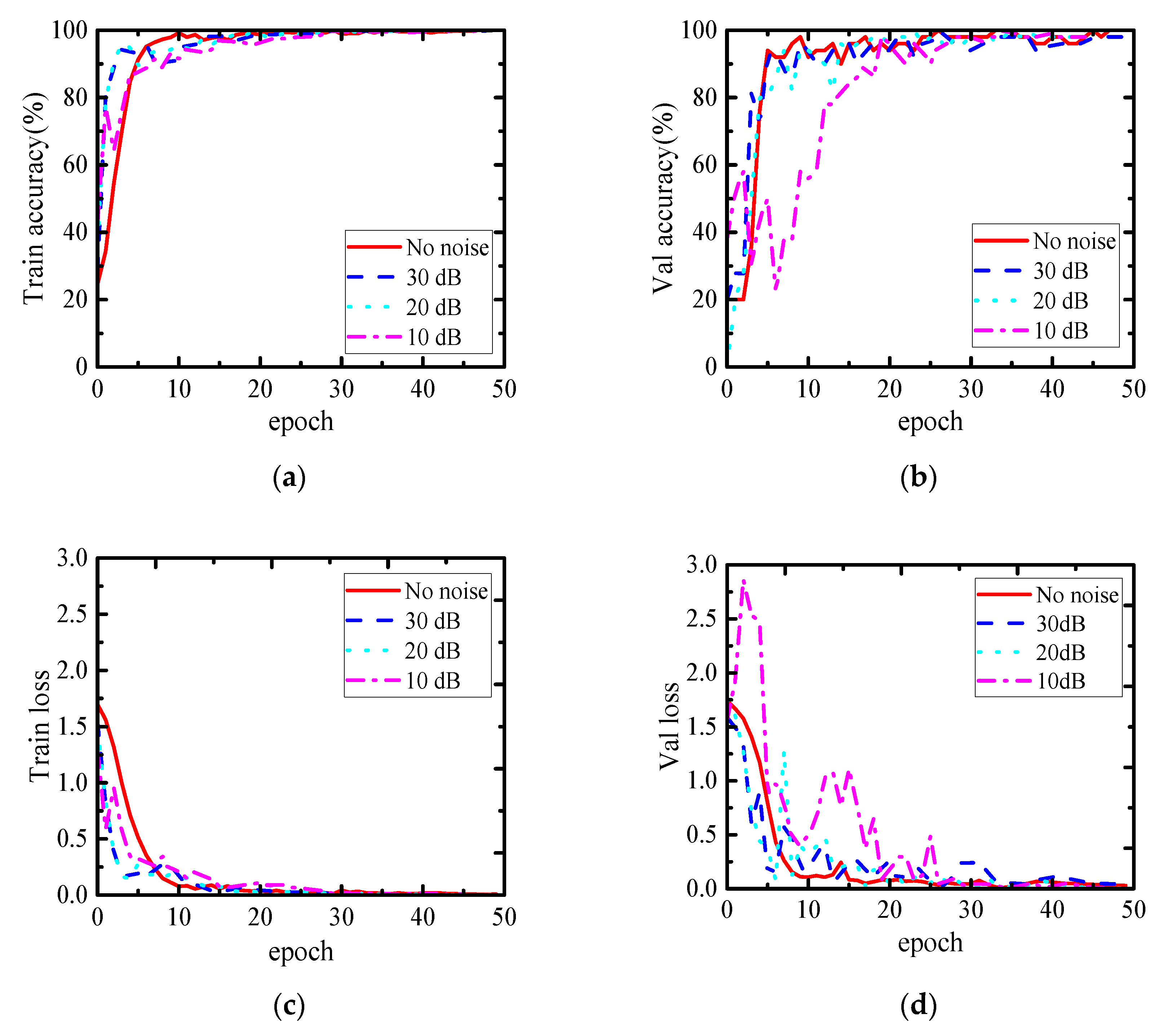
Figure 15. It can be seen that the training set and validation set curves of vehicle speed identification and vehicle weight identification at different noise levels have the same pattern. The accuracy and loss curves of the training set do not fluctuate much. The accuracy and loss curves of the validation set have small fluctuations in the first 20 epochs under 10 dB noise conditions, but become smooth in 30 to 50 epochs.
From the test results in
Table 11, the identification accuracy of the test set of the vehicle weight identification task decreases and stabilizes at 98%. With the noise level increases, identification accuracy of test set in vehicle speed identification decreased slightly. The accuracy at 30 dB and 10 dB was 98%, and the accuracy of 20 dB was still 100%. It shows that there is no obvious downward trend in the accuracy of model test, and there is only a slight fluctuation. It can be concluded that the proposed method presents excellent, strong robustness.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}