
Research on Vibration Suppression of Nonlinear Tuned Mass Damper System Based on Complex Variable Average Method
Abstract
:1. Introduction
2. Theoretical Analysis of Nonlinear Tuned Mass Damper Systems
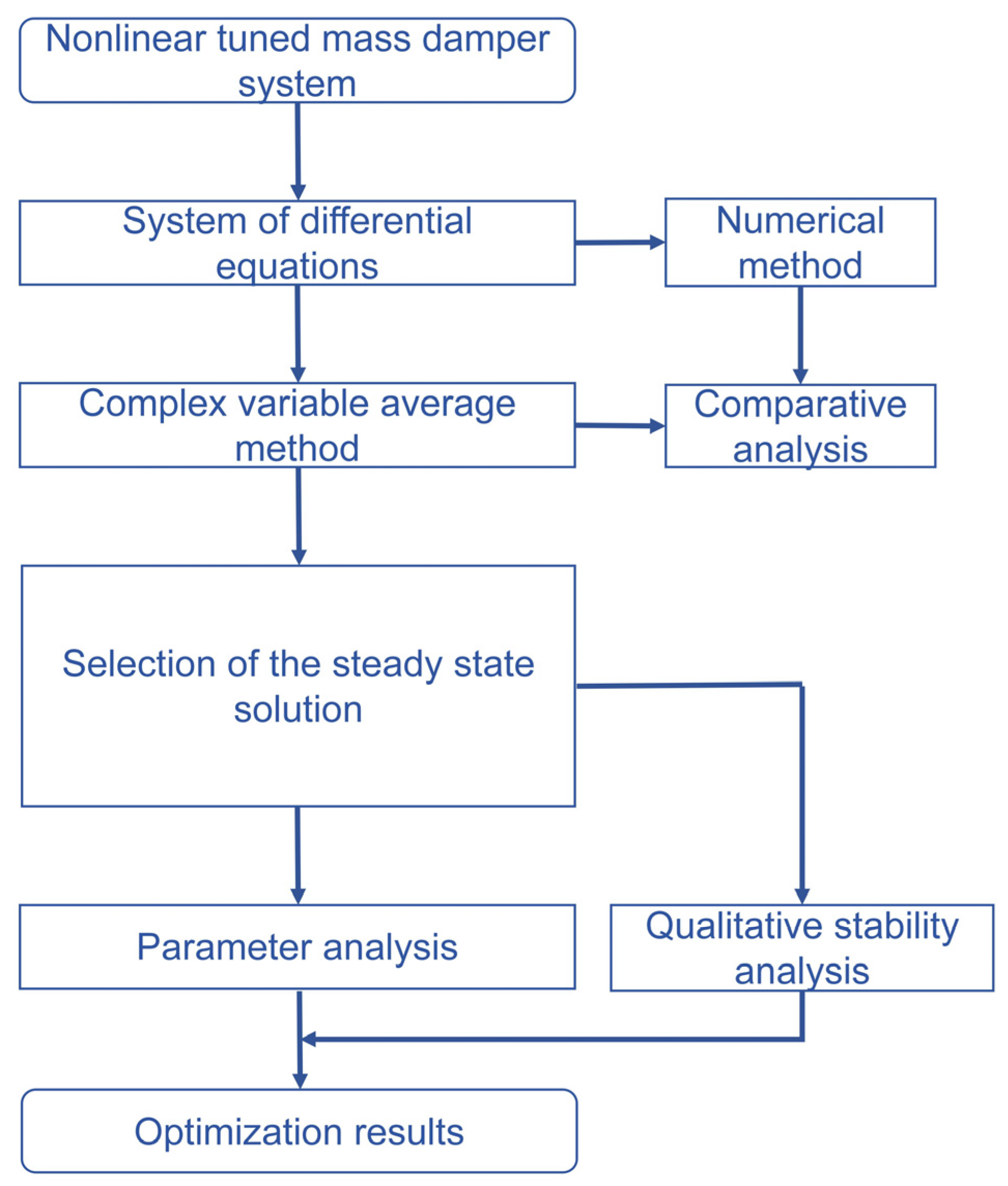
2.1. Research Methodology and Analytical Path
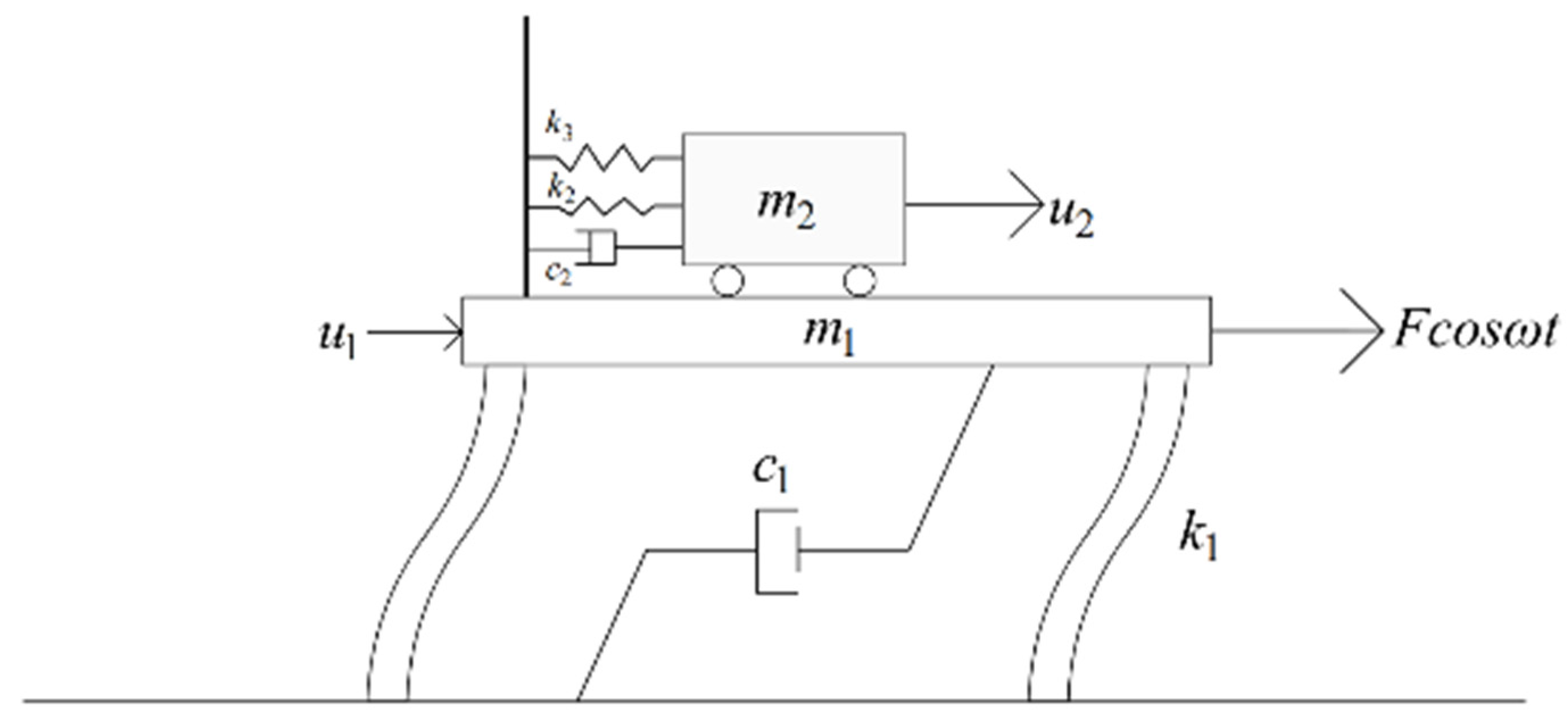
2.2. Balance Equation of the System
2.3. Complex Variable Averaging Method for Solving
3. Nonlinear Analysis
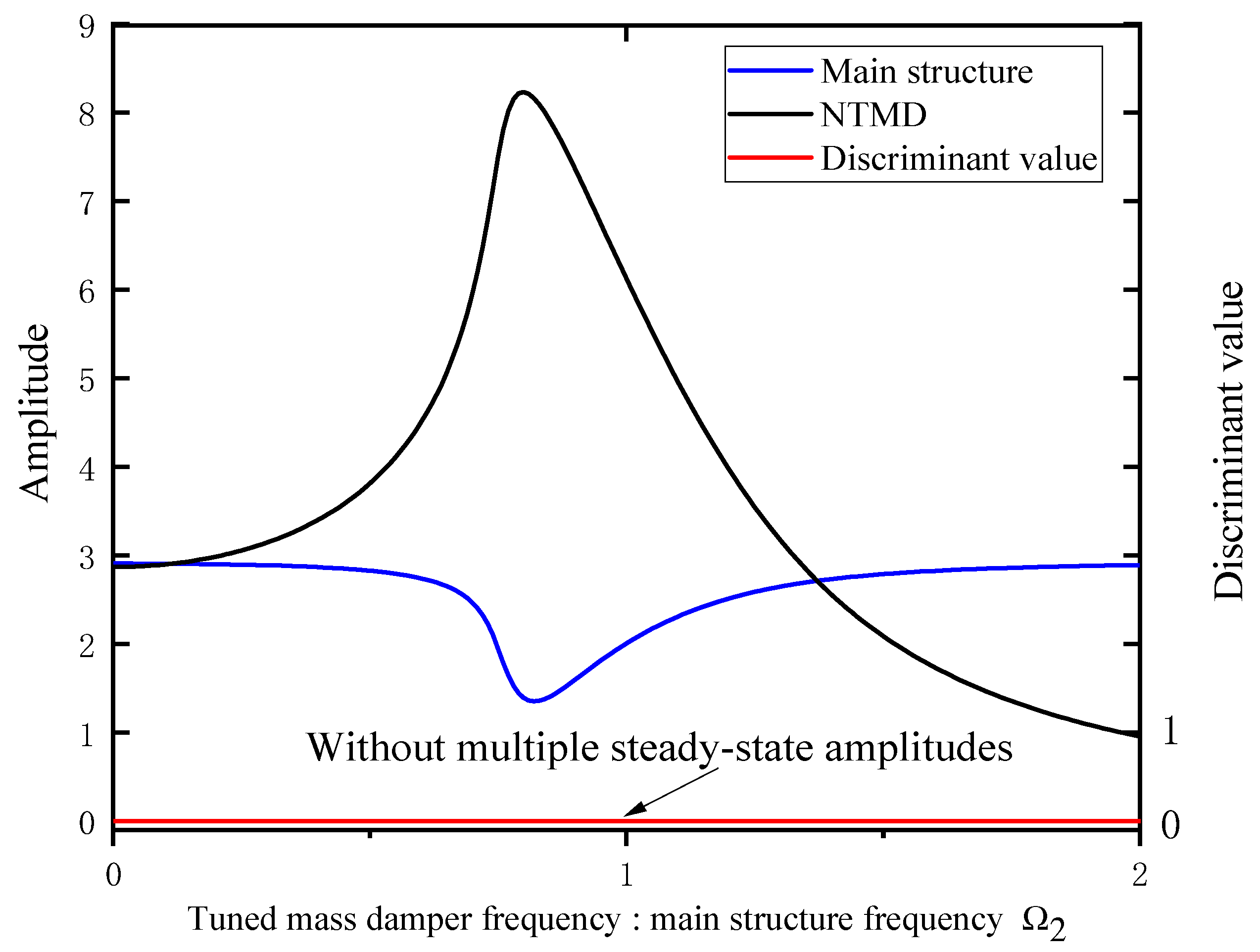
3.1. Analysis of Multivalued Phenomena in the System
3.2. Discriminant of Jump Phenomenon
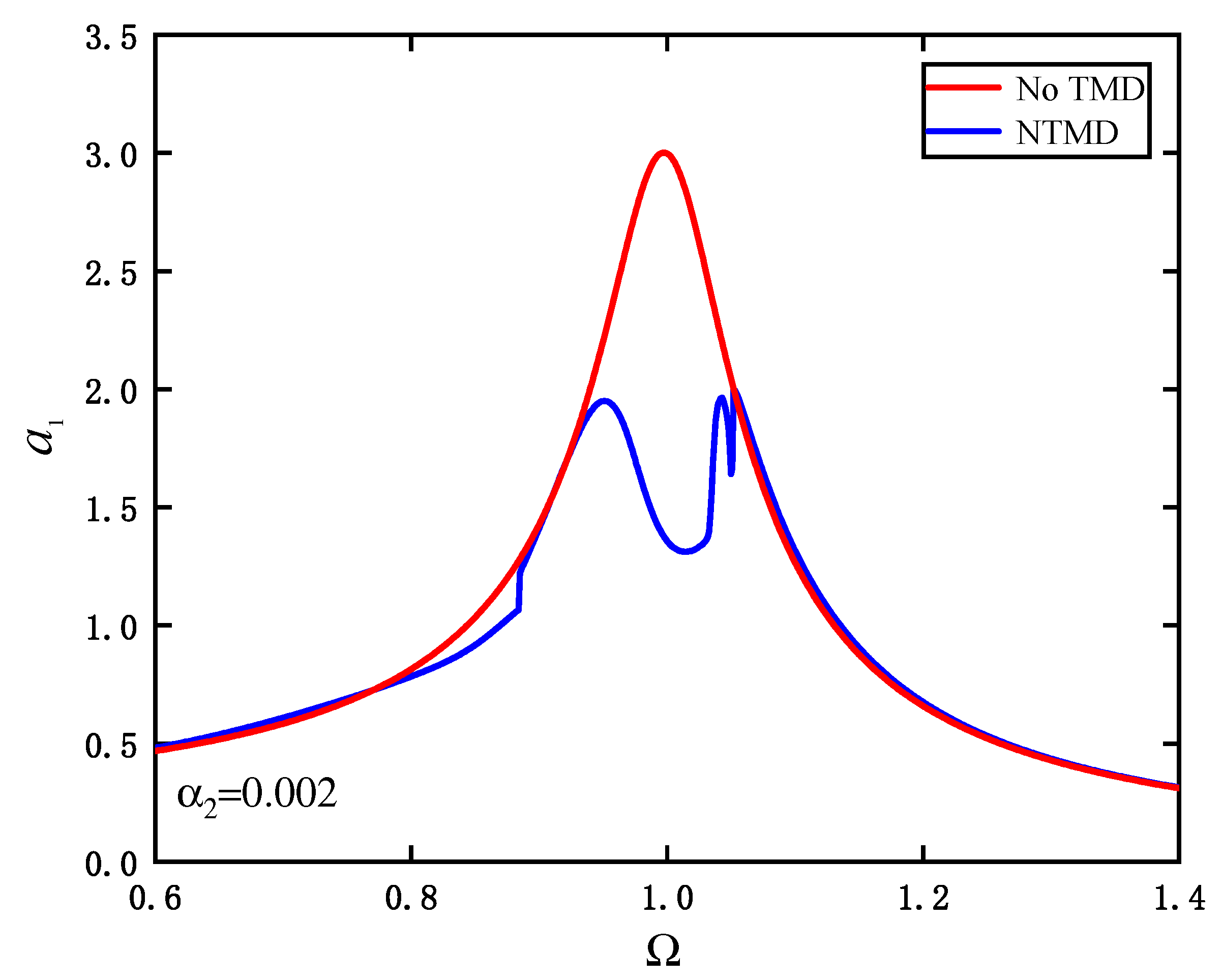
3.3. Jump Research
4. Conclusions
- The modulation–demodulation equations for the steady-state amplitude of the system are obtained using the complex variable averaging method, taking into account the nonlinear characteristics of the TMD generated in the vibration process. The accuracy of the modulation–demodulation equations is verified by numerical methods.
- The possible jump phenomenon of the main structure is analyzed. The discriminant of the jump phenomenon is obtained by processing the modulation–demodulation equations using Cardano’s formula and the discriminant of the cubic equation. The validity of the discriminant is confirmed by the frequency–amplitude curve. The results show that the discriminant of the jump phenomenon can accurately determine whether there is a possibility of jump occurrence in the nonlinearly tuned mass damper system.
- The effect of variations in frequency ratios and nonlinear coefficients on the steady-state amplitude of the structure is investigated using the discriminant of the jump phenomenon. By analyzing the steady-state amplitudes of the system corresponding to different parameter cases, four different response areas are obtained. The results show that selecting parameters in the single-value solution area and the low-branch single-valued solution area can help the structure avoid the jump phenomenon, ensure its stability, and improve the vibration reduction effect of NTMD.
5. Shortcomings and Prospects
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zamora, G.; Diego, A.; Corona, L. Impact of Tuned Mass Dampers and Electromagnetic Tuned Mass Dampers on Geometrically Nonlinear Vibrations Reduction of Planar Cable Robots. Shock Vib. 2023, 2023, 6951186. [Google Scholar]
- Lu, Z.; Zhou, M.; Ma, N.; Du, J. Comparative Studies on Nonlinear Structures with Multiple Tuned Mass Damper and Multiple Tuned Impact Damper. Int. J. Struct. Stab. Dyn. 2023, 23, 2350158. [Google Scholar] [CrossRef]
- Lu, Z.; Wang, Z.X.; Zhou, Y.; Lu, X.L. Nonlinear dissipative devices in structural vibration control: A review. J. Sound Vib. 2018, 423, 18–49. [Google Scholar] [CrossRef]
- Spencer, B.F.; Nagarajaiah, S. State of the Art of Structural Control. J. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- da Costa, M.M.A.; Castello, D.A.; Magluta, C.; Roitman, N. On the optimal design and robustness of spatially distributed tuned mass dampers. Mech. Syst. Signal Process. 2021, 150, 107289. [Google Scholar] [CrossRef]
- Lin, C.C.; Ueng, J.M.; Huang, T.C. Seismic response reduction of irregular buildings using passive tuned mass dampers. Eng. Struct. 2000, 22, 513–524. [Google Scholar] [CrossRef]
- Hoang, N.; Fujino, Y.; Warnitchai, P. Optimal tuned mass damper for seismic applications and practical design formulas. Eng. Struct. 2008, 30, 707–715. [Google Scholar] [CrossRef]
- Song, G.B.; Zhang, P.; Li, L.Y.; Singla, M.; Patil, D.; Li, H.N.; Mo, Y.L. Vibration Control of a Pipeline Structure Using Pounding Tuned Mass Damper. J. Eng. Mech. 2016, 142, 4016031. [Google Scholar] [CrossRef]
- Elias, S.; Matsagar, V. Research developments in vibration control of structures using passive tuned mass dampers. Annu. Rev. Control 2017, 44, 129–156. [Google Scholar] [CrossRef]
- Kwok, K.C.S.; Samali, B. Performance of tuned mass dampers under wind loads. Eng. Struct. 1995, 17, 655–667. [Google Scholar] [CrossRef]
- Teng, J.; Lu, Z.X.; Xiao, Y.Q. Study on TMD contact nonlinear damped vibration control of towering structures. Vib. Shock 2009, 28, 90–97. [Google Scholar]
- Fallahpasand, S.; Dardel, M.; Pashaei, M.H. Investigation and optimization of nonlinear pendulum vibration absorber for horizontal vibration suppression of damped system. Struct. Des. Tall Spec. Build. 2015, 24, 873–893. [Google Scholar] [CrossRef]
- Frahm, H. Device for Damping Vibrations of Bodies. U.S. Patent No. US989958A, 18 April 1911. [Google Scholar]
- Ormondroyd, J.; Hartog, J.P. The theory of the dynamic vibration absorber. Trans. Am. Soc. Mech. Eng. 1928, 50, 9–22. [Google Scholar]
- Den Hartog, J.P. Mechanical Vibrations, 4th ed.; Graw-Hill: New York, NY, USA, 1956. [Google Scholar]
- Tsai, H.C.; Lin, G.C. Optimum tuned-mass dampers for minimizing steady-state response of support-excited and damped systems. Earthq. Eng. Struct. Dyn. 1993, 22, 957–973. [Google Scholar] [CrossRef]
- Paul, H.W.; Gary, W.C. Minimal structural response under random excitation using the vibration absorber. Earthq. Eng. Struct. Dyn. 1973, 2, 303–312. [Google Scholar]
- Sladek, J.; Klingner, R. Effect of tuned-mass dampers on seismic response. J. Struct. Div. 1983, 109, 2004–2009. [Google Scholar] [CrossRef]
- Villaverde, R. Reduction in seismic response with heavily-damped vibration absorbers. Earthq. Eng. Struct. Dyn. 1985, 13, 33–42. [Google Scholar] [CrossRef]
- Roberson, R. Synthesis of a nonlinear dynamic vibration absorber. J. Frankl. Inst. 1952, 254, 205–220. [Google Scholar] [CrossRef]
- Natsiavas, S. Steady state oscillations and stability of non-linear dynamic vibration absorbers. J. Sound Vib. 1992, 156, 227–245. [Google Scholar] [CrossRef]
- Jiang, X.A.; McFarland, D.M.; Bergman, L.A.; Vakakis, A.F. Steady state passive nonlinear energy pumping in coupled oscillators: Theoretical and experimental results. Nonlinear Dyn. 2003, 33, 87–102. [Google Scholar] [CrossRef]
- Manevitch, L.I.; Gourdon, E.; Lamarque, C.H. Parameters optimization for energy pumping in strongly nonhomogeneous 2 dof system. Chaos Solitons Fractals 2007, 31, 900–911. [Google Scholar] [CrossRef]
- Gatti, G.; Kovacic, I.; Brennan, M.J. On the response of a harmonically excited two degree-of-freedom system consisting of a linear and a nonlinear quasi-zero stiffness oscillator. J. Sound Vib. 2010, 329, 1823–1835. [Google Scholar] [CrossRef]
- Li, L.Y.; Zhang, T.J. Analytical analysis for the design of nonlinear tuned mass damper. J. Vib. Control 2020, 26, 646–658. [Google Scholar] [CrossRef]
- Wei, Y.M.; Wei, S.; Zhang, Q.L.; Dong, X.J.; Peng, Z.K.; Zhang, W.M. Targeted energy transfer of a parallel nonlinear energy sink. Appl. Math. Mech. 2019, 40, 621–630. [Google Scholar] [CrossRef]
- Rao, A.R.M. Nonlinear system identification using empirical slow flow model. J. Struct. Eng. 2017, 44, 1. [Google Scholar]
- Prawin, J.; Rao, A. Nonlinear System Identification of Breathing Crack Using Empirical Slow-Flow Model. In Recent Advances in Structural Engineering, Volume 1: Select Proceedings of SEC 2016; Springer: Singapore, 2019. [Google Scholar]
- Zhang, T.J.; Li, L.Y. Analytical analysis for optimizing mass ratio of nonlinear tuned mass dampers. Nonlinear Dyn. 2021, 106, 1955–1974. [Google Scholar] [CrossRef]
- Li, L.Y.; Du, Y.J. Design of Nonlinear Tuned Mass Damper by Using the Harmonic Balance Method. J. Eng. Mech. 2020, 146, 04020056. [Google Scholar] [CrossRef]
- Liu, J.F.; Yao, J.; Huang, K.; Zhang, Q.; Li, Z. Analysis of a nonlinear tuned mass damper by using the multi-scale method. J. Theor. Appl. Mech. 2022, 60, 463–477. [Google Scholar] [CrossRef]
- Hu, Y.J.; Yao, J.; Liu, J.F.; Zhang, Q. Analysis and Design of Nonlinear Tuned Mass Damper Based on Complex Variable Averaging Method. Appl. Sci. 2023, 13, 6287. [Google Scholar] [CrossRef]
- Su, X.Y.; Kang, H.J.; Guo, T.D. Modelling and energy transfer in the coupled nonlinear response of a 1:1 internally resonant cable system with a tuned mass damper. Mech. Syst. Signal Process. 2022, 162, 108058. [Google Scholar] [CrossRef]
- Yao, J.; Liu, J.F.; Hu, Y.J.; Zhang, Q. Optimal Design and Analysis of Nonlinear Tuned Mass Damper System. Appl. Sci. 2023, 13, 8046. [Google Scholar] [CrossRef]
- Chowdhury, S.; Banerjee, A.; Adhikari, S. The optimal design of dynamic systems with negative stiffness inertial amplifier tuned mass dampers. Appl. Math. Model. 2023, 114, 694–721. [Google Scholar] [CrossRef]
- Cardano, G. Ars Magna; Dover Publications: London, UK, 1545. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Critical Frequency | Numerical Method | Analytical Method | |
|---|---|---|---|
| 0.1 | the left | 0.391 | 0.388 |
| 0.1 | the right | 0.413 | 0.416 |
| 0.2 | the left | 0.289 | 0.287 |
| 0.2 | the right | 0.320 | 0.323 |
| 0.3 | the left | 0.239 | 0.238 |
| 0.3 | the right | 0.272 | 0.274 |
| 0.4 | the left | 0.210 | 0.208 |
| 0.4 | the right | 0.241 | 0.242 |
| 0.5 | the left | 0.188 | 0.187 |
| 0.5 | the right | 0.218 | 0.220 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Hu, Y.; Yao, J.; Zhang, Q. Research on Vibration Suppression of Nonlinear Tuned Mass Damper System Based on Complex Variable Average Method. Buildings 2023, 13, 2866. https://doi.org/10.3390/buildings13112866
Liu J, Hu Y, Yao J, Zhang Q. Research on Vibration Suppression of Nonlinear Tuned Mass Damper System Based on Complex Variable Average Method. Buildings. 2023; 13(11):2866. https://doi.org/10.3390/buildings13112866
Chicago/Turabian StyleLiu, Junfeng, Yujun Hu, Ji Yao, and Qing Zhang. 2023. "Research on Vibration Suppression of Nonlinear Tuned Mass Damper System Based on Complex Variable Average Method" Buildings 13, no. 11: 2866. https://doi.org/10.3390/buildings13112866