
Damage Analysis and Quality Control of Carbon-Reinforced Concrete Beams Based on In Situ Computed Tomography Tests

 , , , , , , ,
, , , , , , ,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
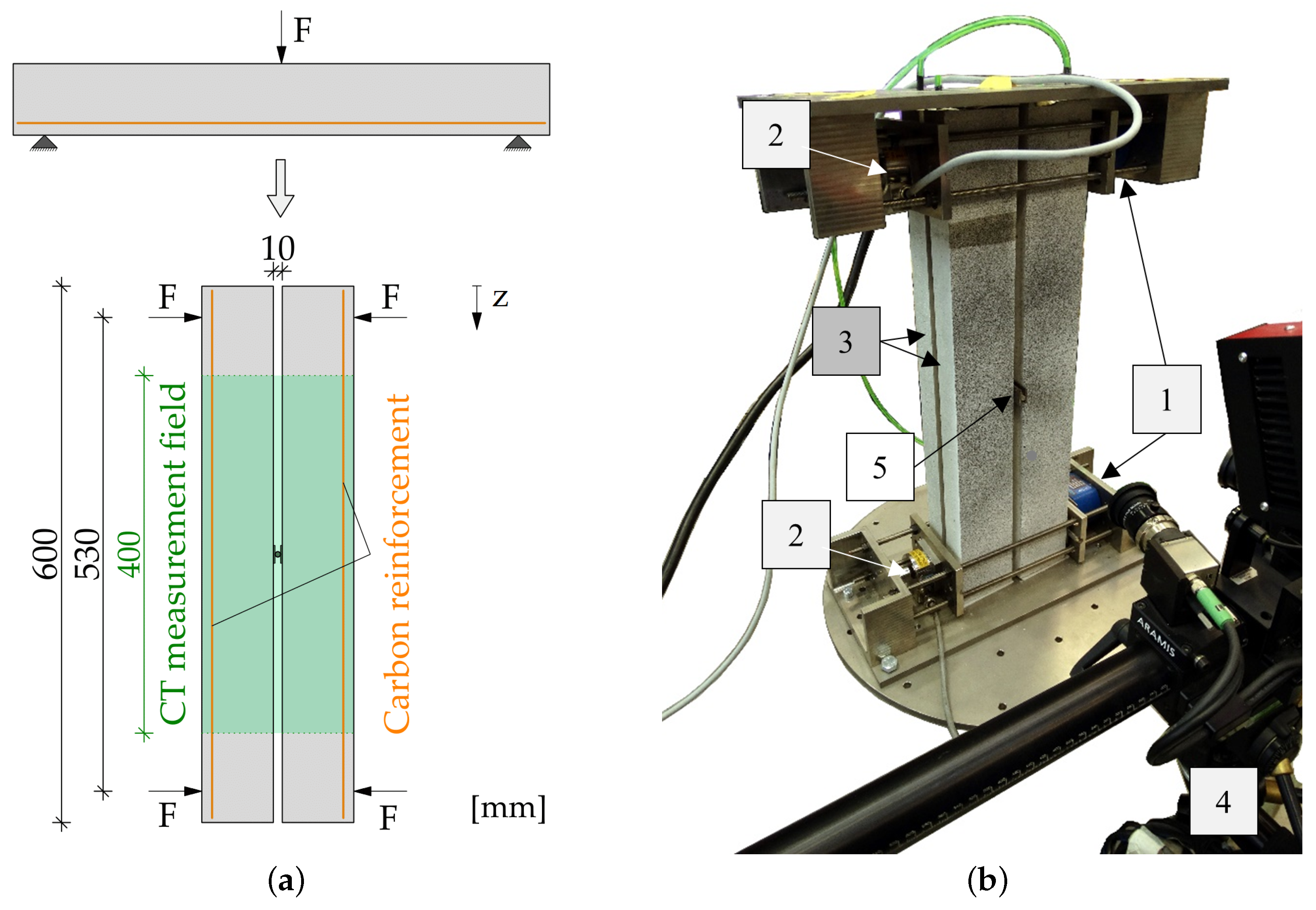
2.1. Test Setup and Experimental Program
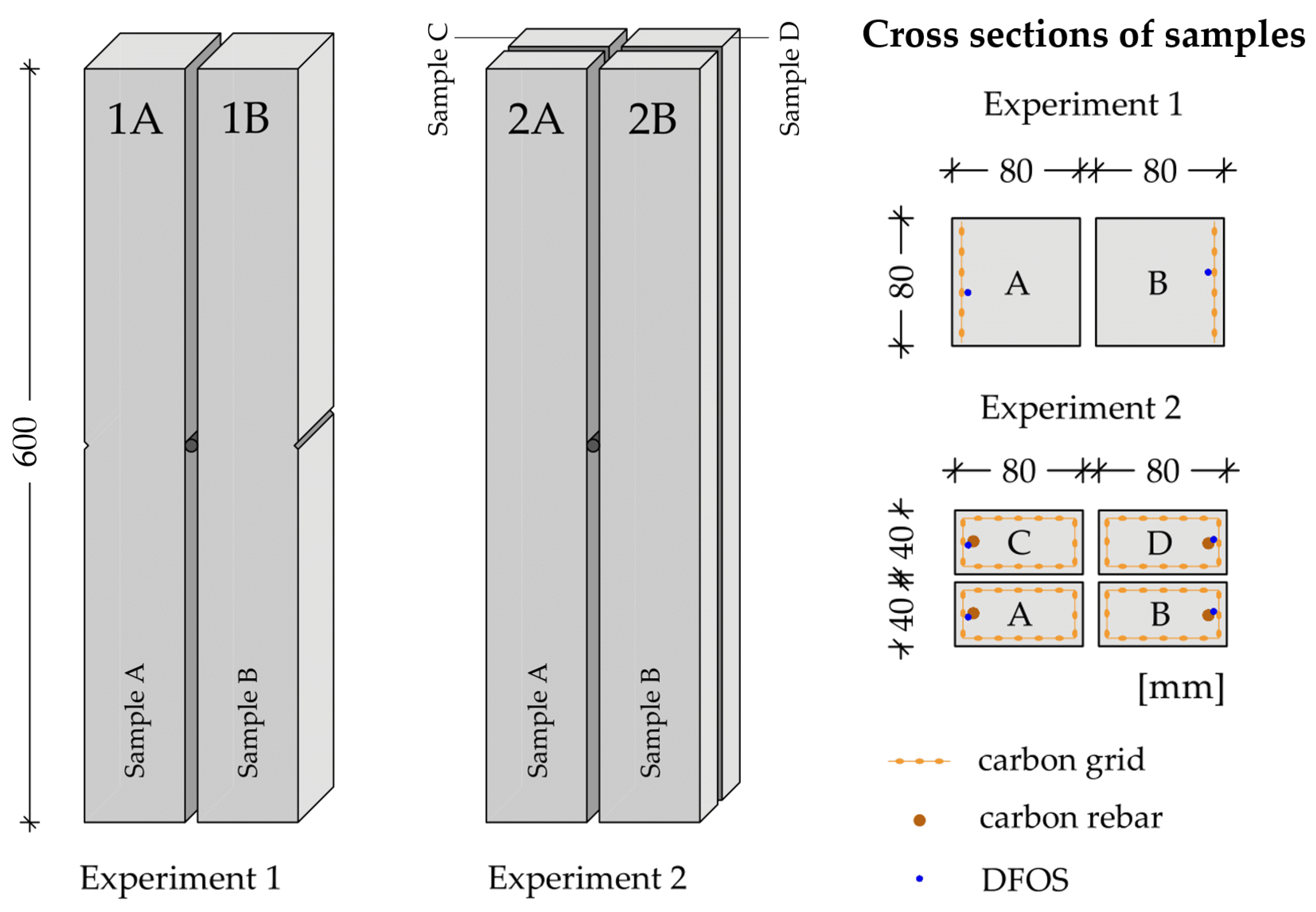
2.2. Specimens
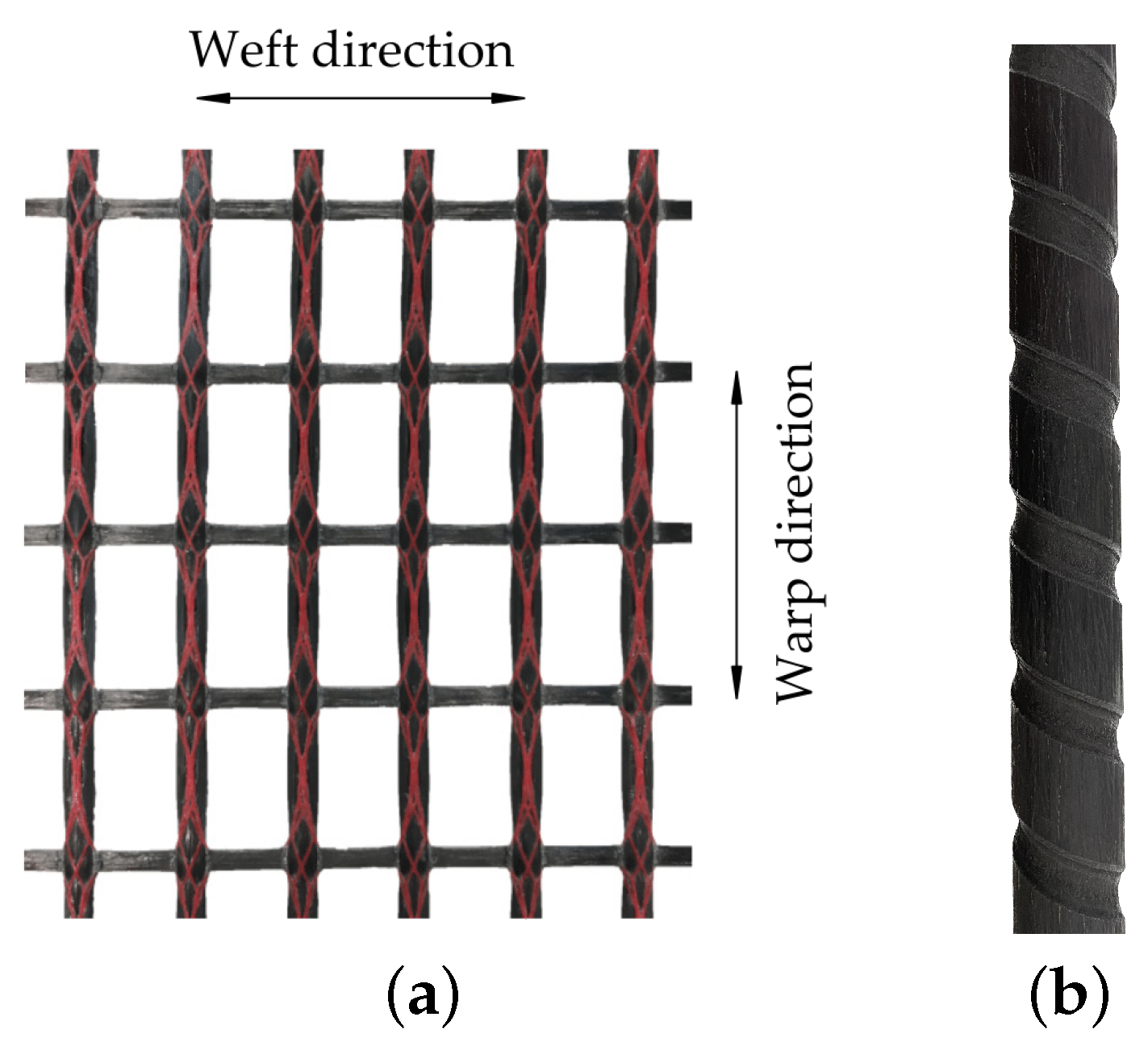
2.3. Materials
2.4. Measurement Methods
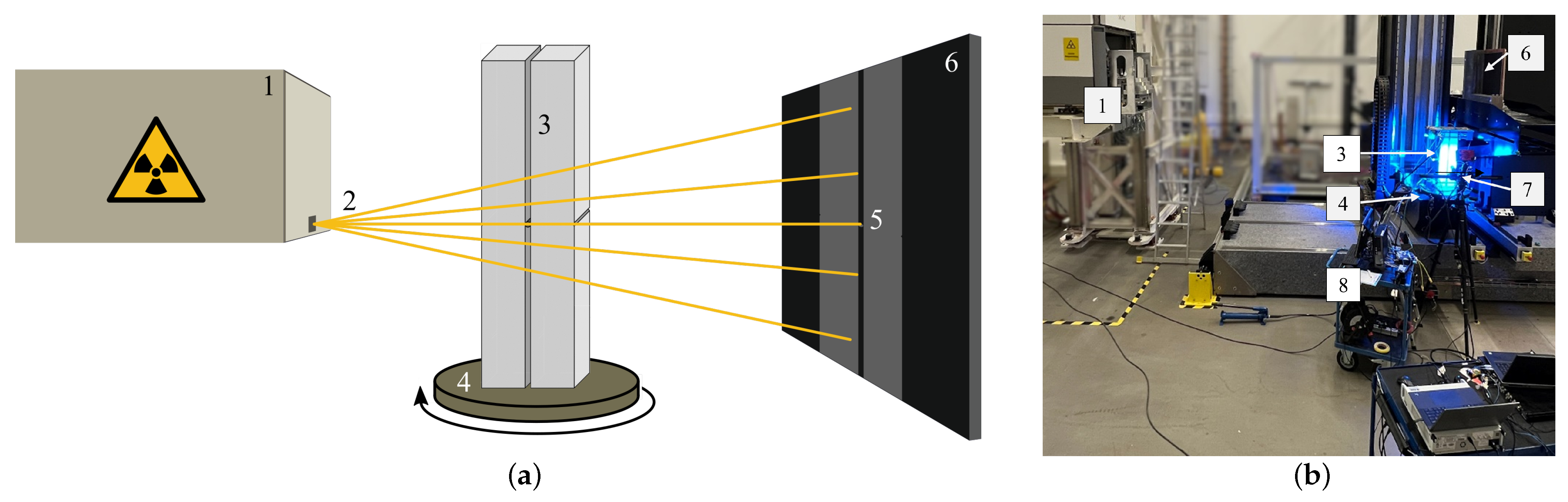
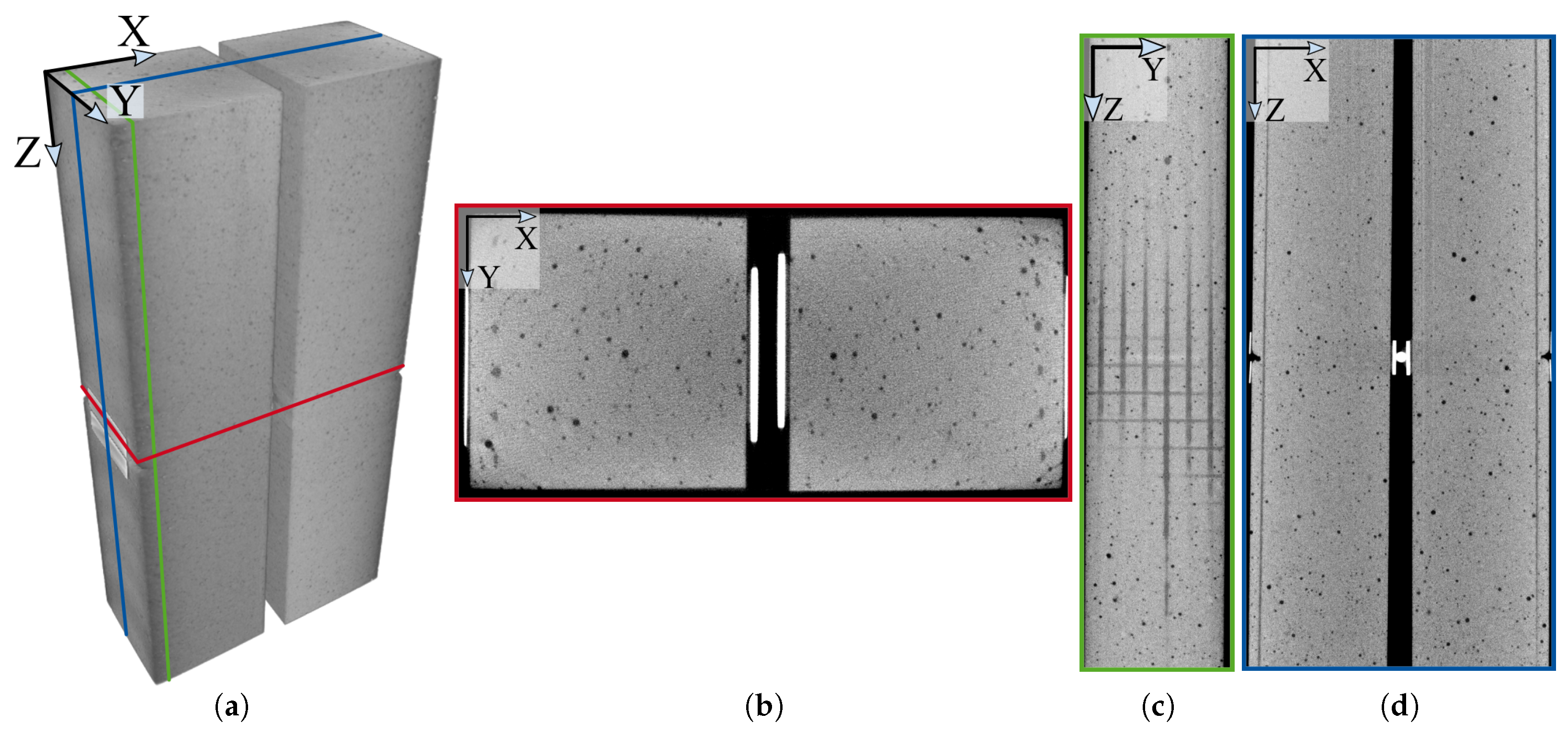
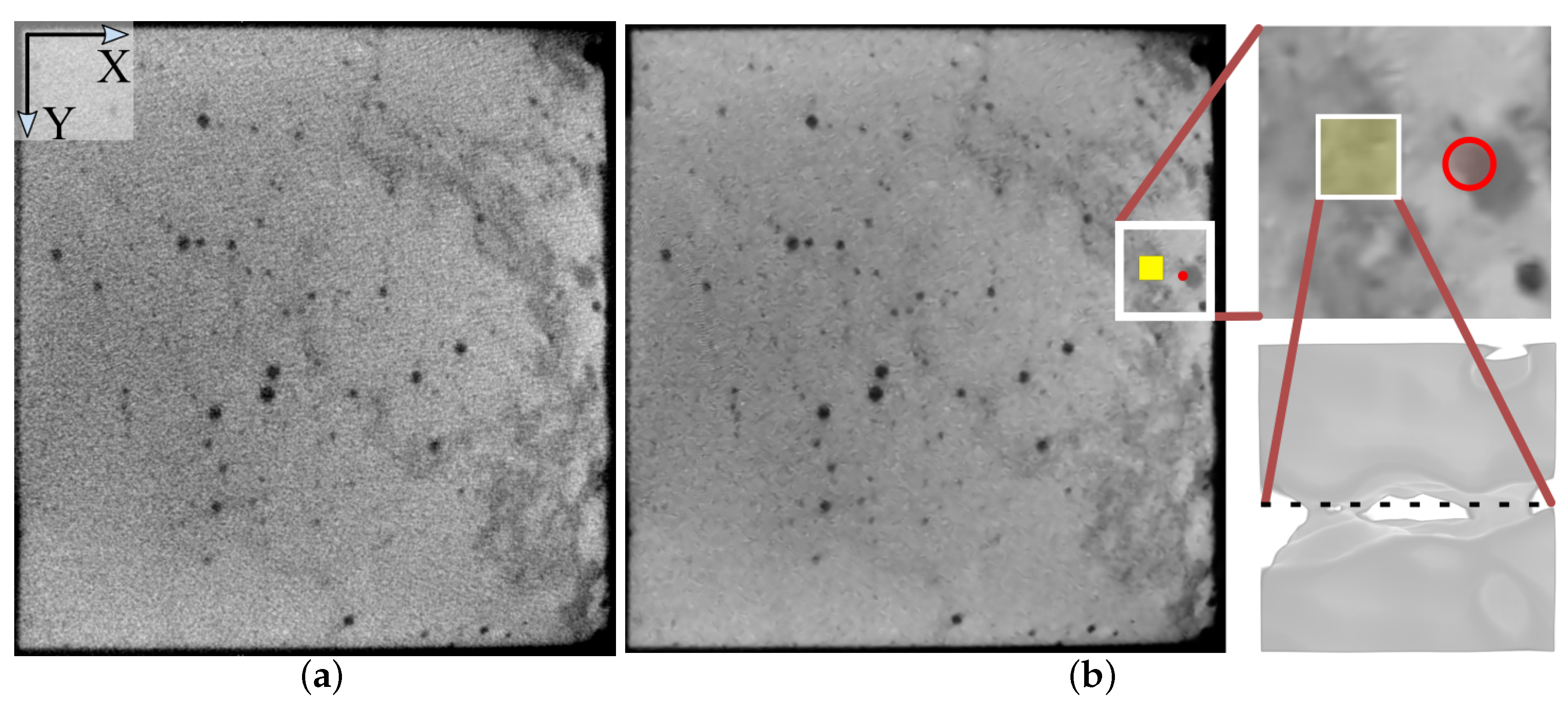
2.4.1. In Situ Computed Tomography
2.4.2. Photogrammetry
2.5. Analysis Methods
2.5.1. Digital Image Correlation
2.5.2. Digital Volume Correlation
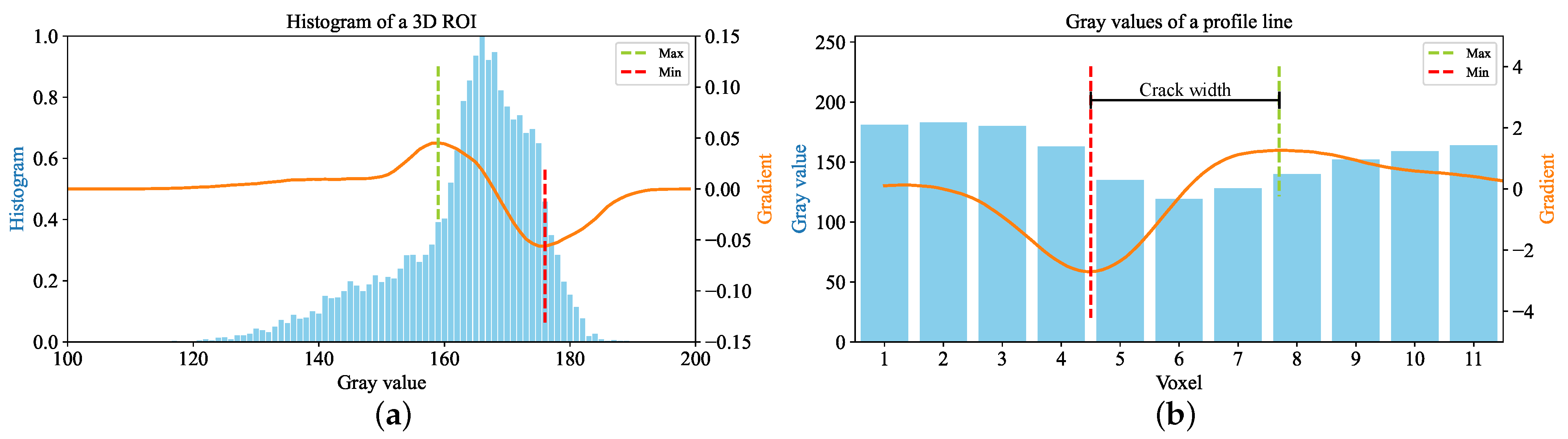
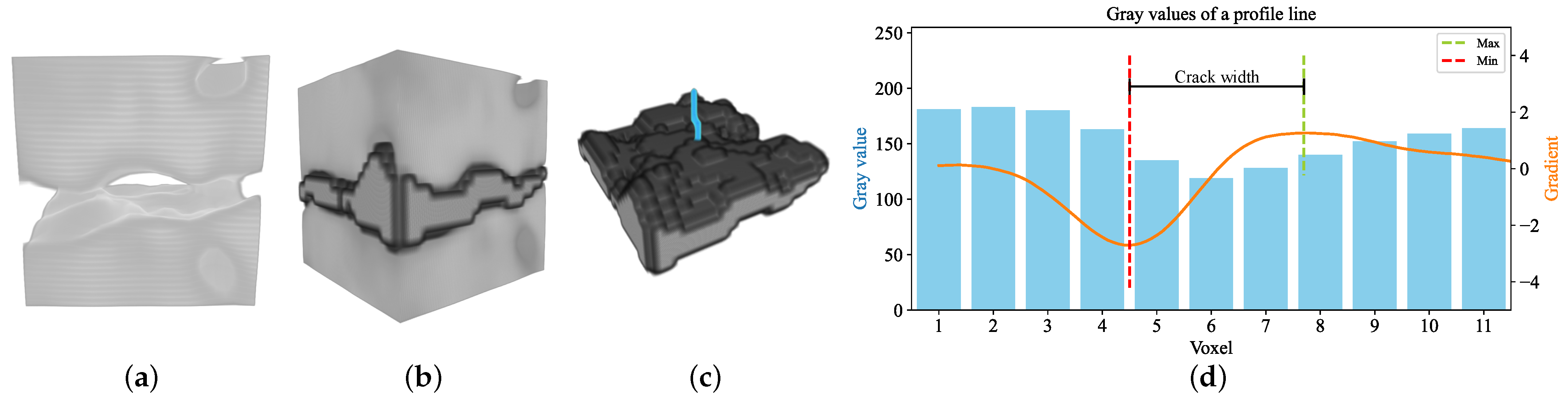
2.5.3. Crack Width Estimation by Grayscale Profile Analysis
- Reduction of noise, using a non-local means filter (only for noisy data);
- Manual selection of ROIs;
- Segmentation of the crack;
- Plane fit to the crack voxels;
- Calculation of the profile along the normal;
- Measurement of the distance between the minimum and maximum gradient.
2.6. Quality Control
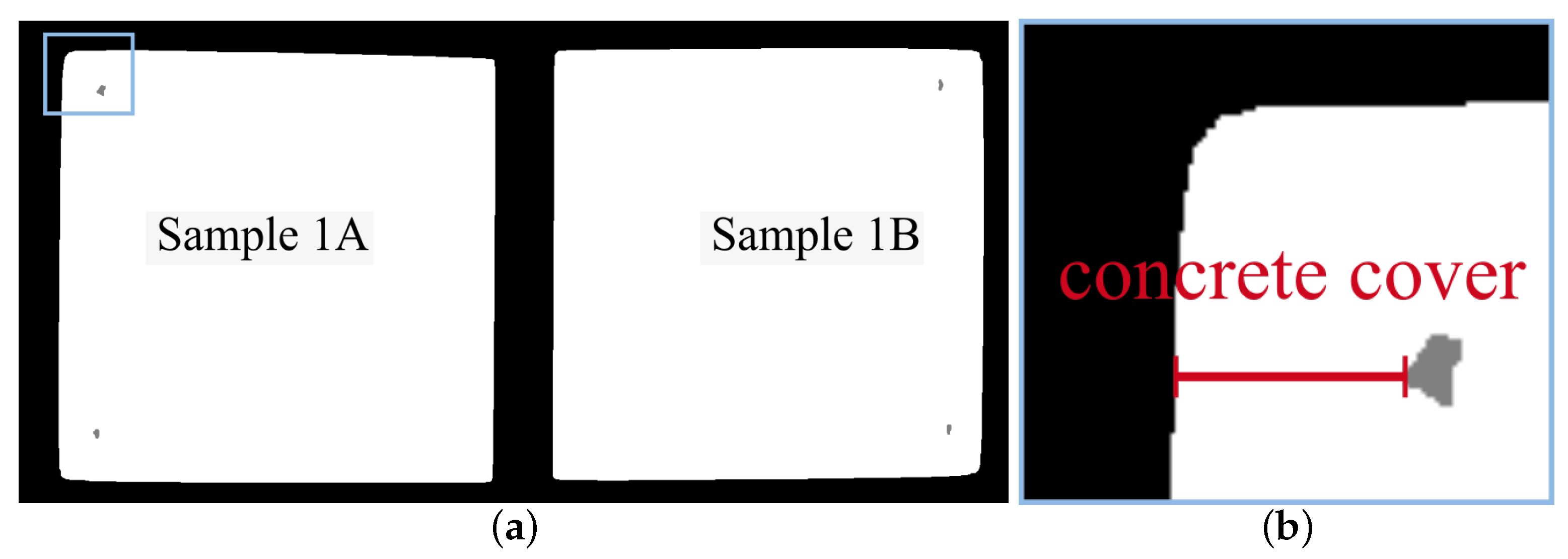
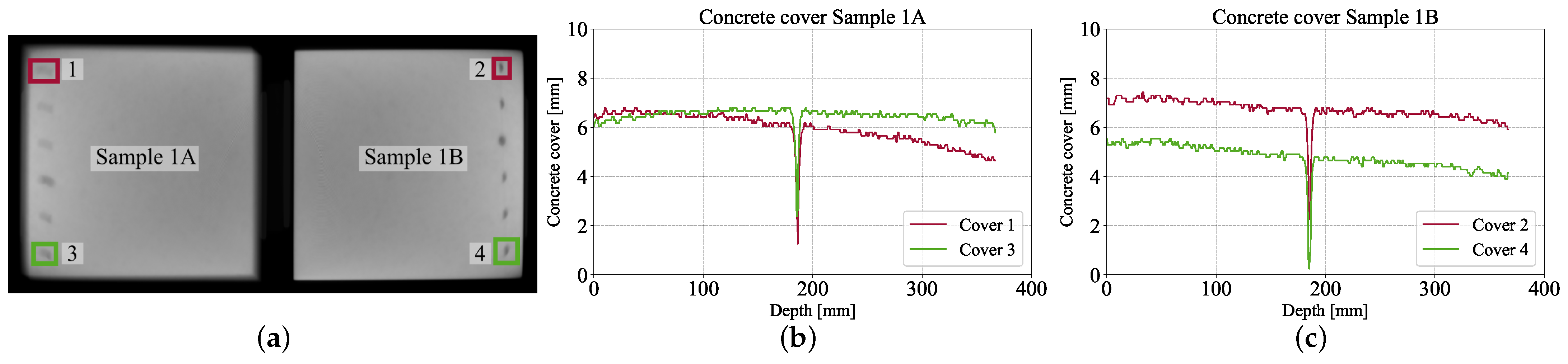
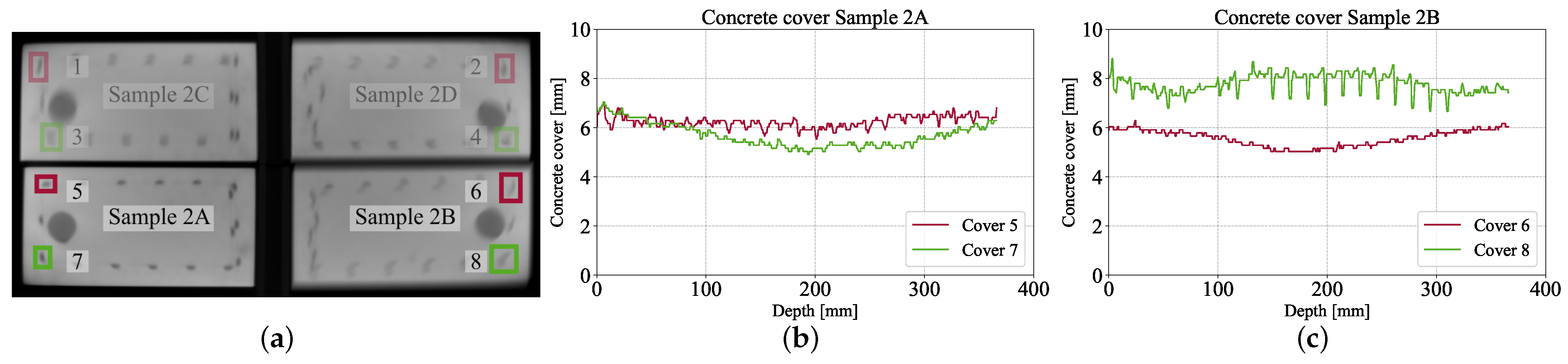
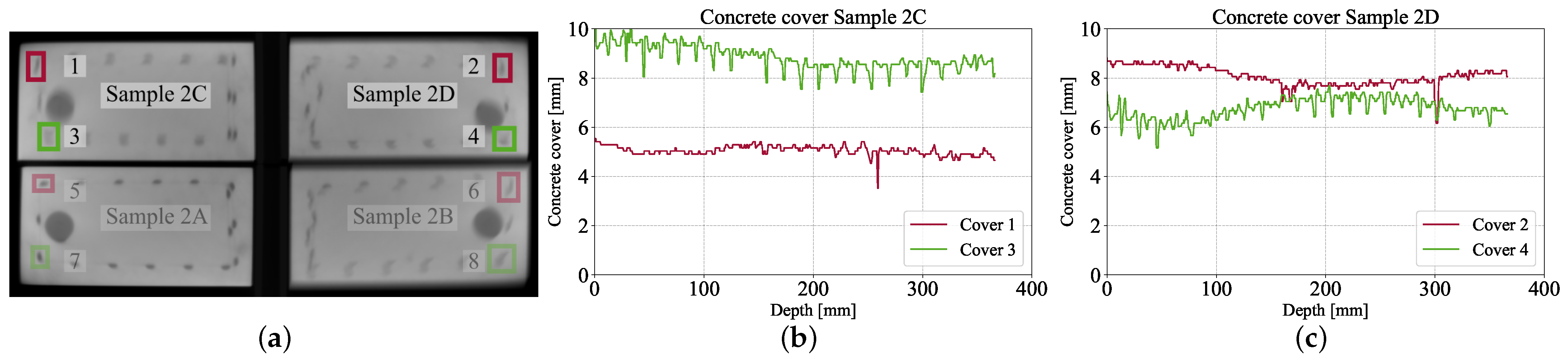
2.6.1. Analysis of Concrete Cover
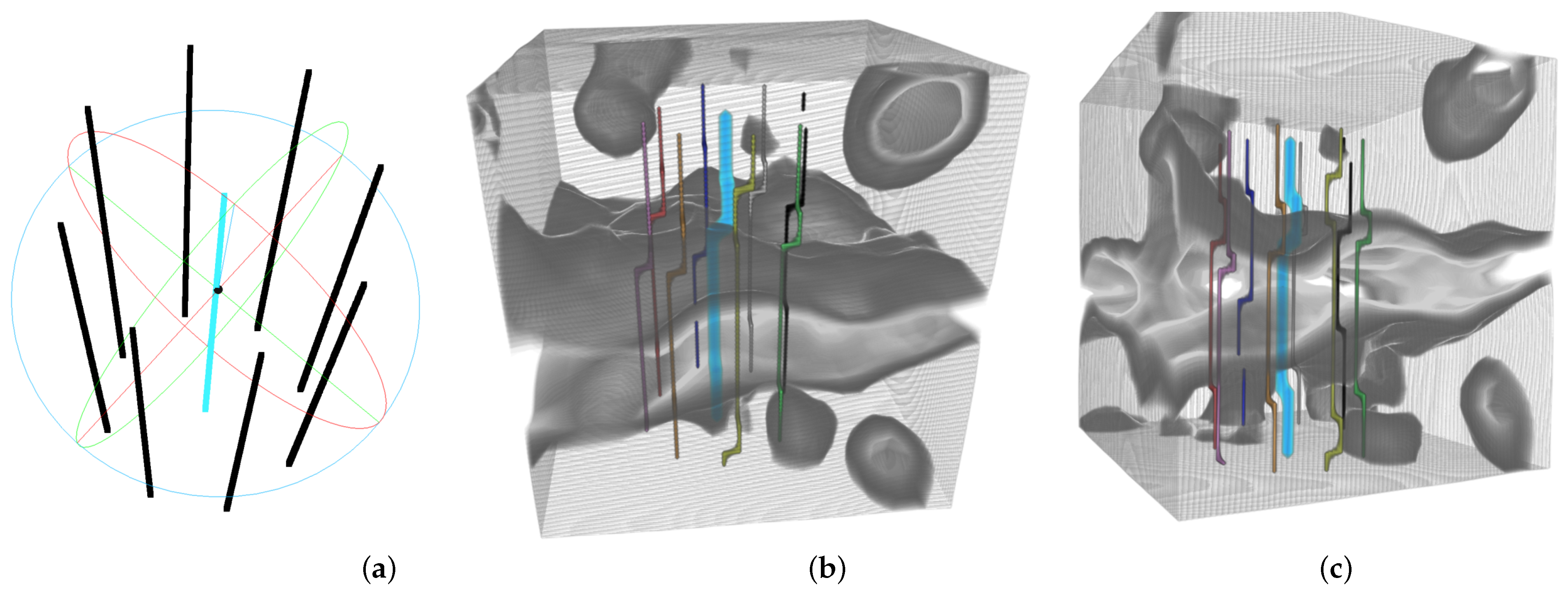
2.6.2. Porosity
3. Results
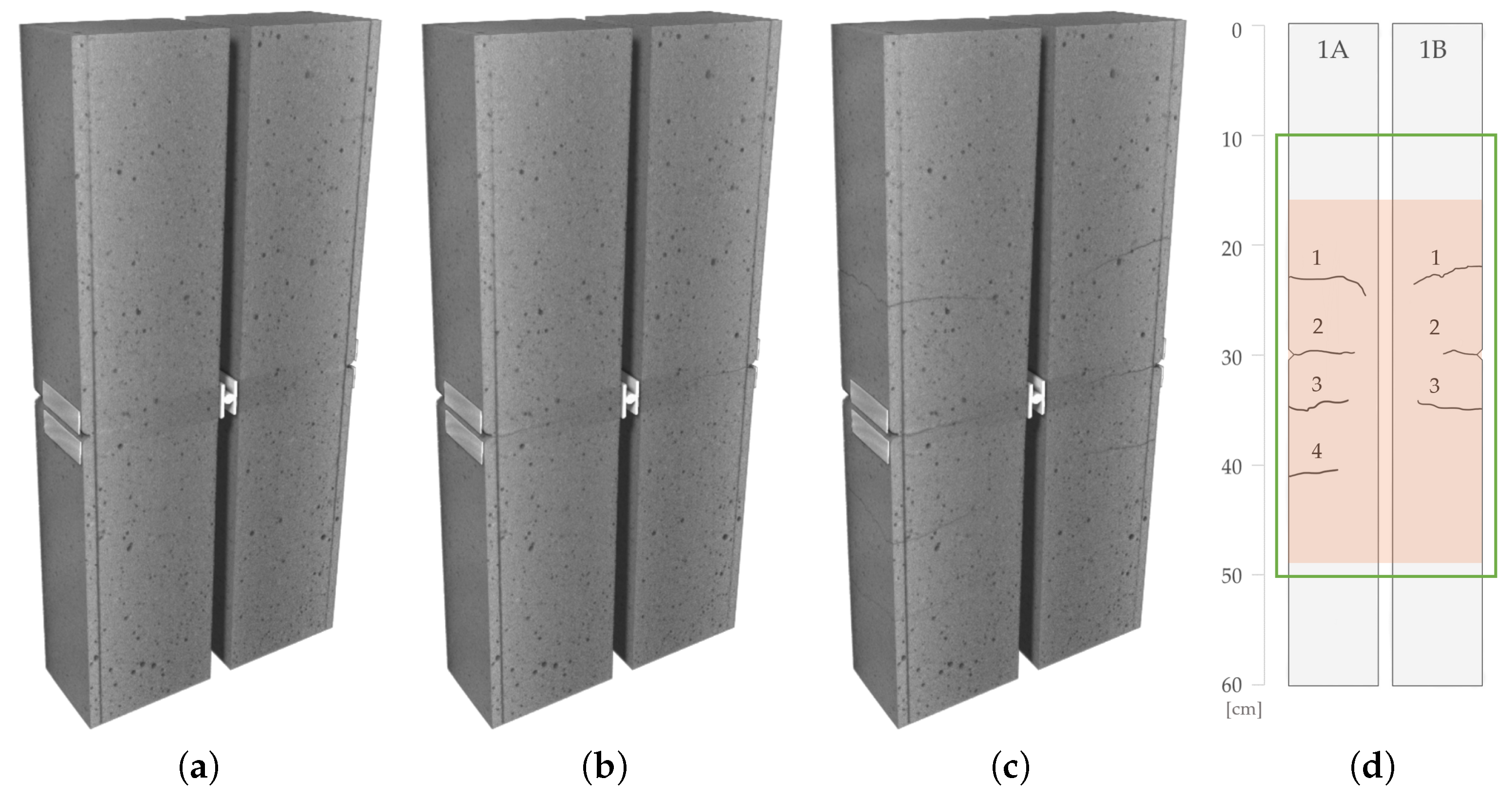
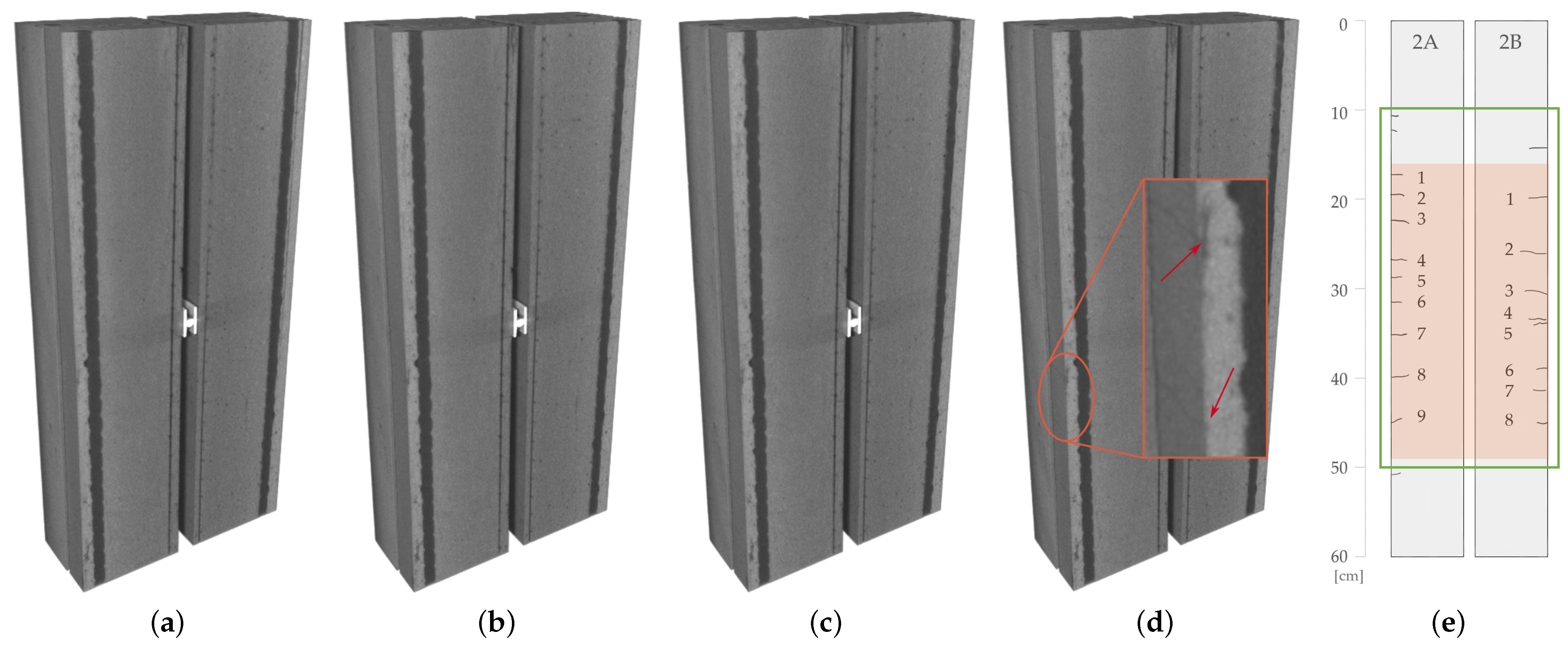
3.1. In Situ CT Scans
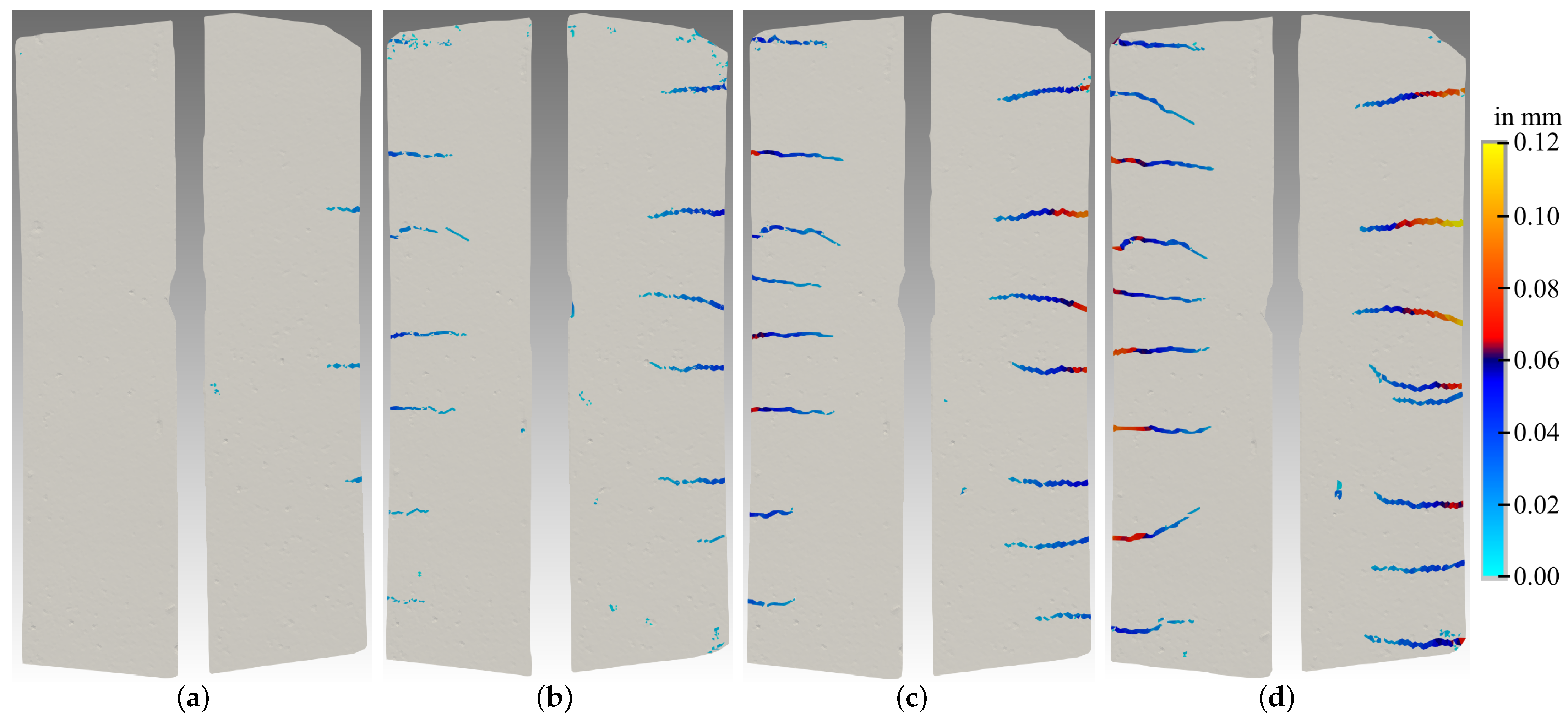
3.2. Digital Image Correlation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Step at 4 kN | Load Step at 6 kN | |||
|---|---|---|---|---|
| Crack Label | 1A | 1B | 1A | 1B |
| 1 | 0.224 | 0.270 | ||
| 2 | 0.168 | 0.203 | 0.272 | 0.300 |
| 3 | 0.198 | 0.227 | ||
| 4 | 0.132 | |||
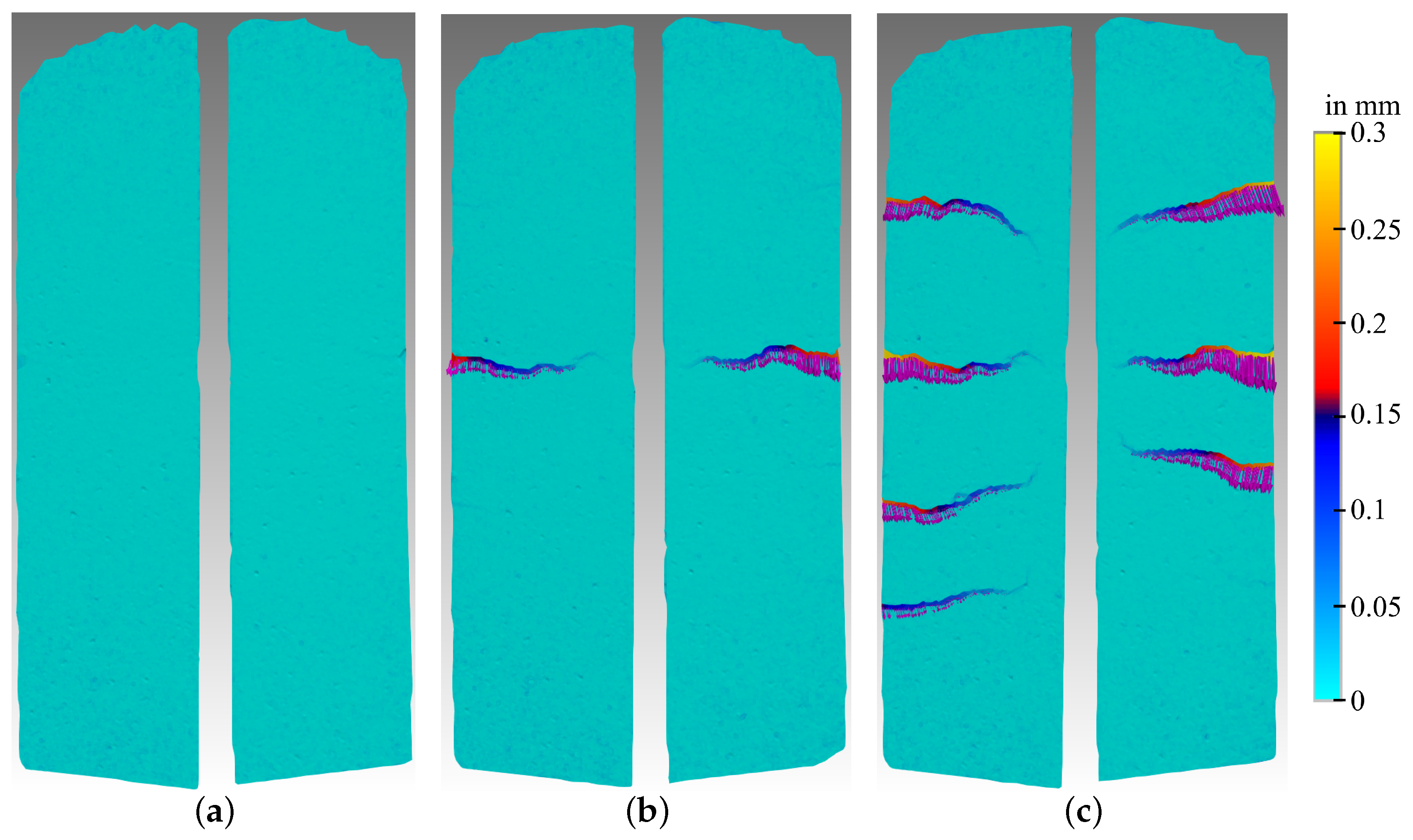
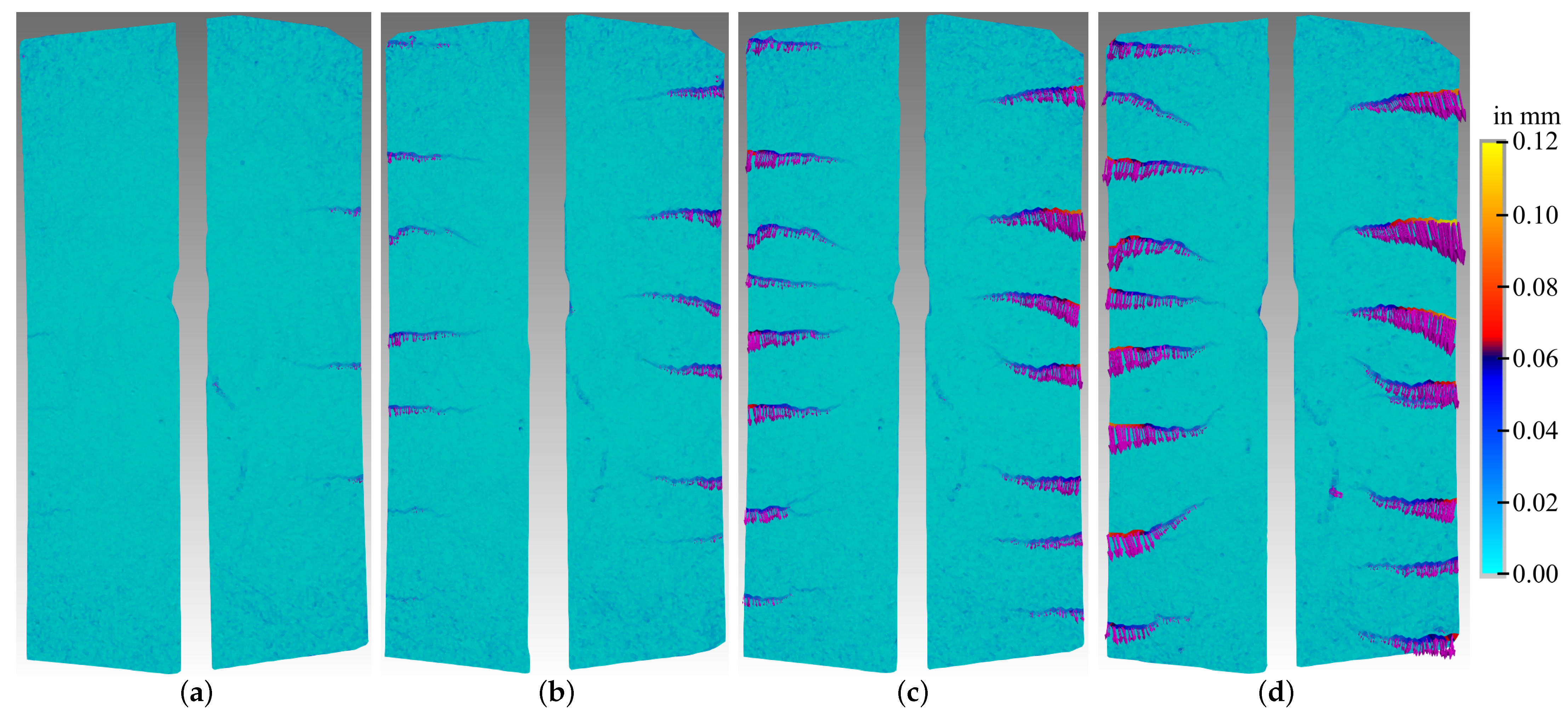
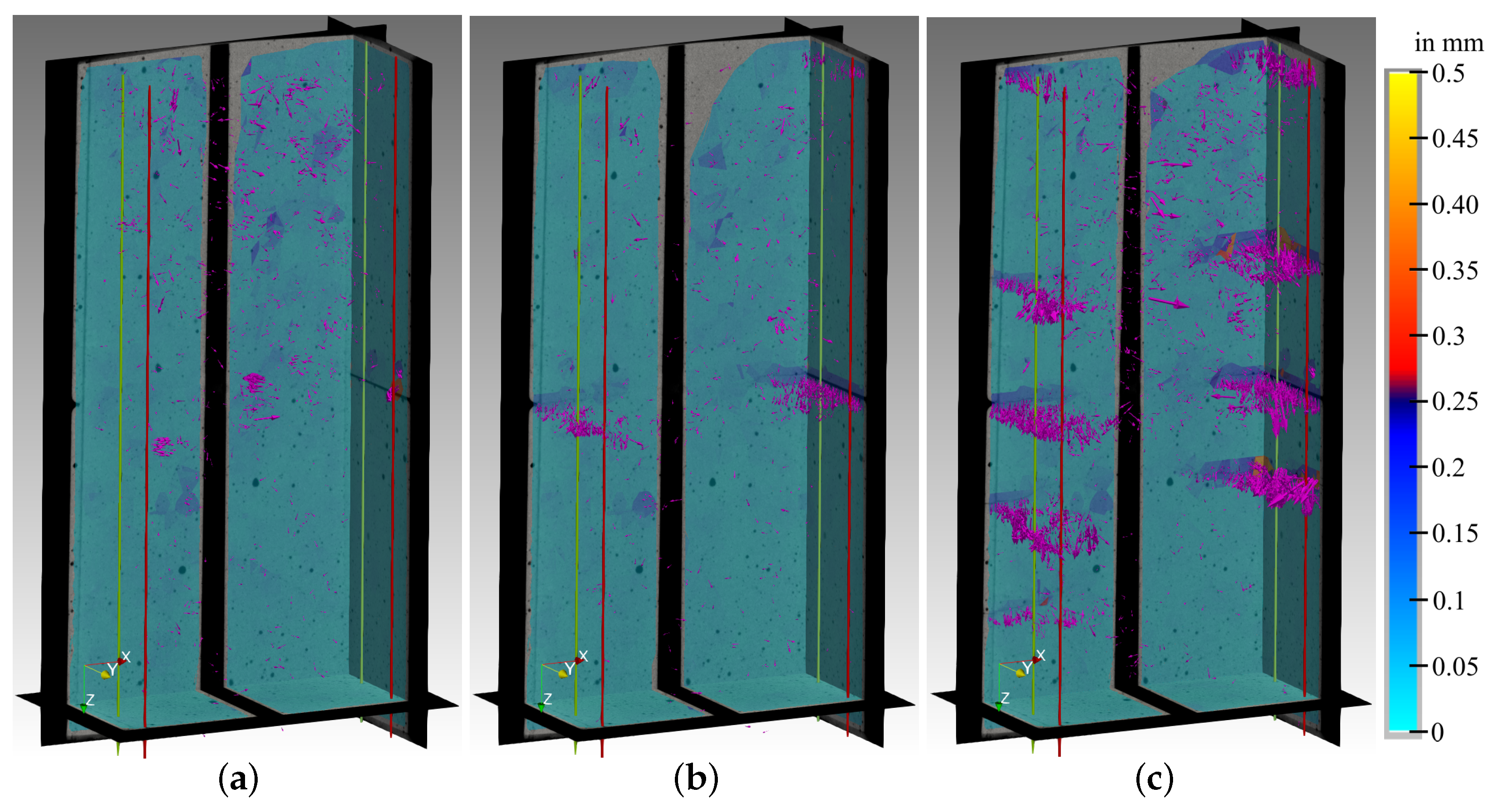
3.3. Digital Volume Correlation
| Load Step at 4 kN | Load Step at 6 kN | |||
|---|---|---|---|---|
| Crack Label | 1A | 1B | 1A | 1B |
| 1 | 0.193 | 0.254 | ||
| 2 | 0.247 | 0.212 | 0.268 | 0.318 |
| 3 | 0.227 | 0.216 | ||
| 4 | 0.174 | |||
| Load Step at 4 kN | Load Step at 6 kN | |||
|---|---|---|---|---|
| Crack Label | 1A | 1B | 1A | 1B |
| 1 | 0.290 | 0.293 | ||
| 2 | 0.172 | 0.219 | 0.252 | 0.301 |
| 3 | 0.202 | 0.289 | ||
| 4 | 0.245 | |||
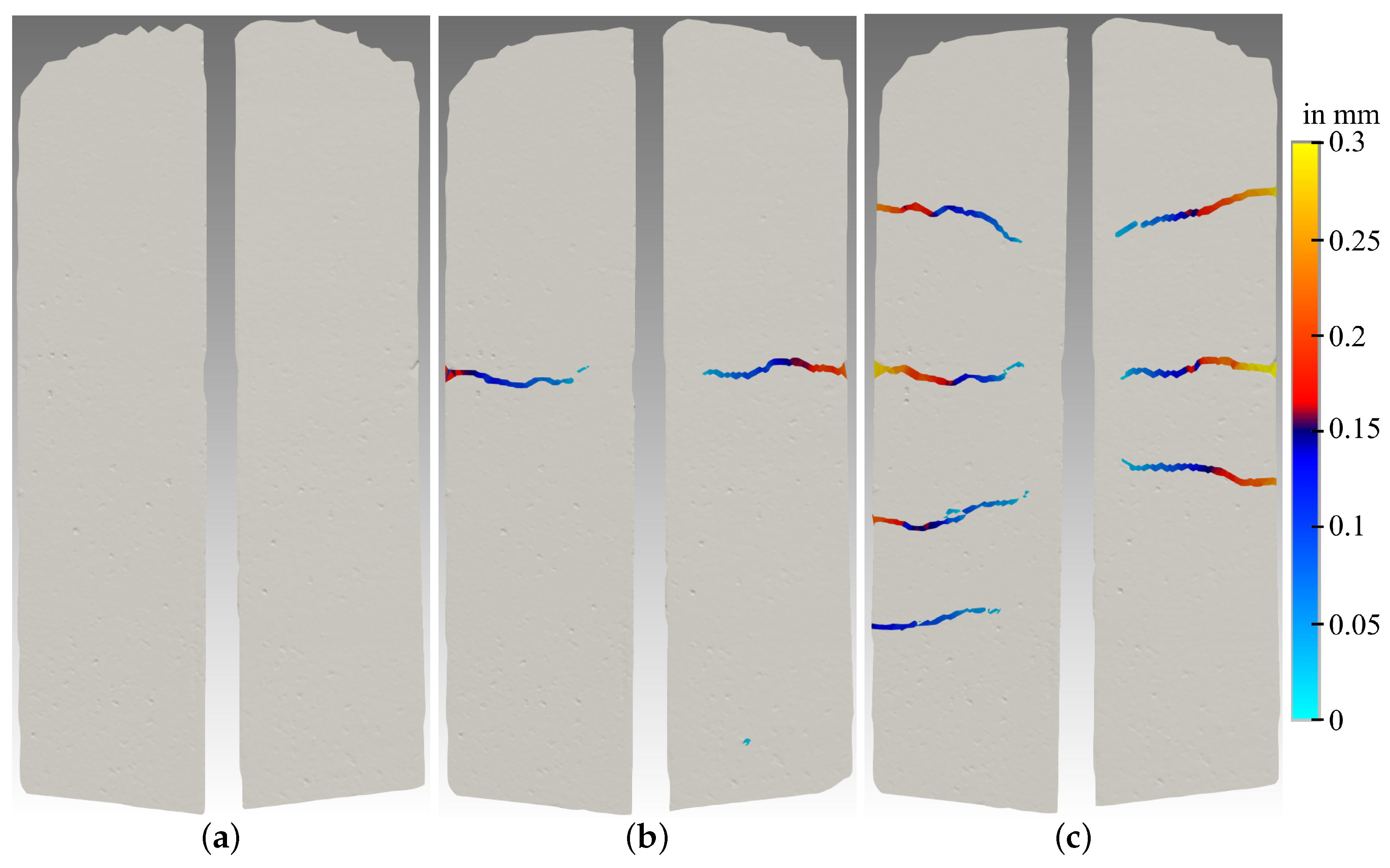
3.4. Grayscale Profile Analysis
3.5. Quality Control
3.5.1. Concrete Cover
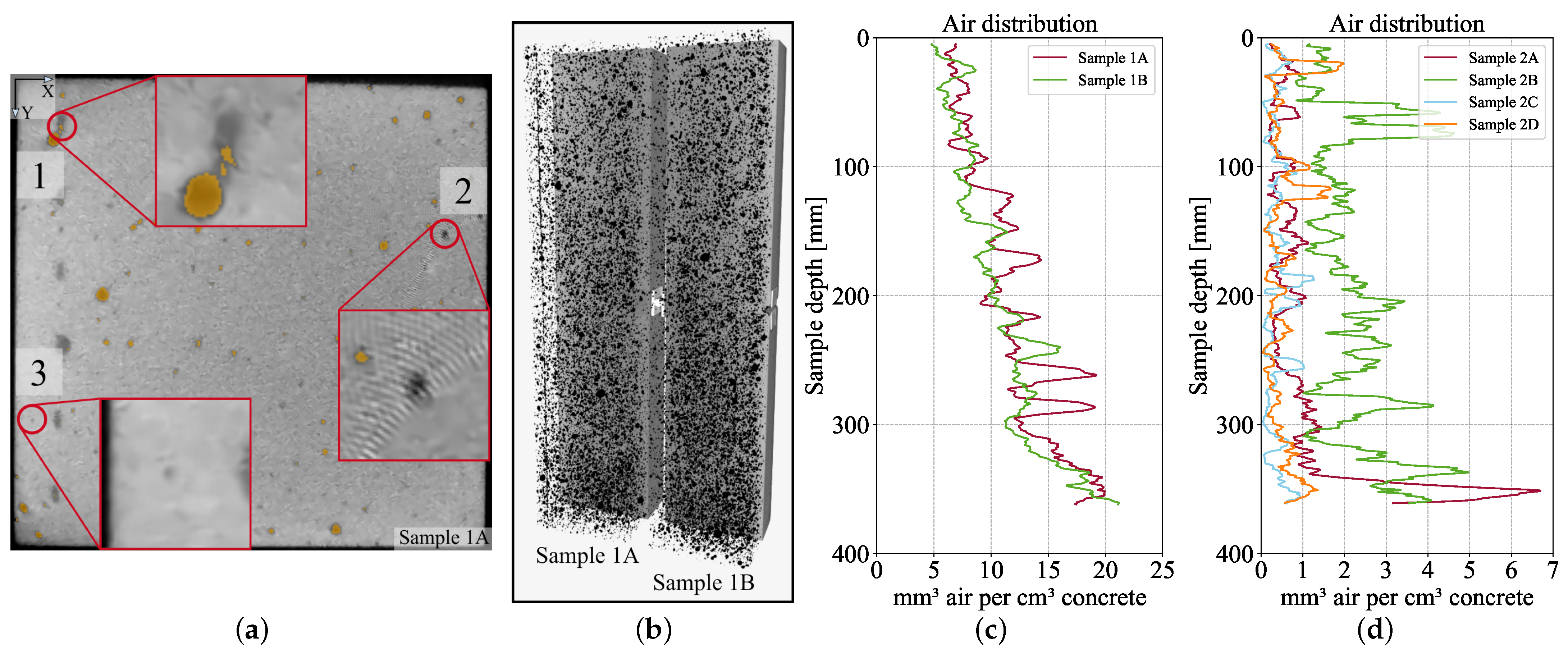
3.5.2. Porosity
- Sample 2A: 0.9 mm air per cm concrete (porosity: 0.09 vol%);
- Sample 2B: 2.2 mm air per cm concrete (porosity: 0.22 vol%);
- Sample 2C: 0.4 mm air per cm concrete (porosity: 0.04 vol%);
- Sample 2D: 0.5 mm air per cm concrete (porosity: 0.05 vol%).
4. Discussion
- The development of cracks in the middle section (the field of view of the CT and stereo camera system) of the CRC beams could be successfully observed. The complex characteristics of the crack geometry could be analyzed from various images in different load stages.
- Despite the high noise in the CT data, it was possible to apply DVC to detect cracks in the first experiment. By contrast, the texture in the second experiment was not adequate for the usage of DVC.
- A high-quality stereo camera system was applied, to observe the front surfaces of the specimens, to detect cracks and to measure their widths, which were compared to the results of the DVC. The RMSE as a measure of accuracy was 0.055 mm, which corresponds to 0.44 vx.
- In addition, an alternative voxel data analysis was performed, to measure crack widths, which can also be applied if the texture of the CT image data is not suitable for DVC or if no temporal data are available. For the first experiment, the resulting values systematically overestimated the values of the DVC. The corresponding large RMSE was 0.33 mm. The cracks seemed to be over-represented in the CT reconstruction data. Although the algorithm could not be tested on the second experiment, because the widths of the cracks were smaller than a voxel, it did not rely on the presence of structure in a reconstruction.
- In the processing of the 3D data, inspections of the manufacturing quality of the CRC beams could be carried out. In particular, the evaluation included measuring the distance of the reinforcement from the surface, to ensure the correct concrete cover thickness, and estimating the porosity.
5. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CNN | convolutional neural network |
| CRC | carbon-reinforced concrete |
| CT | computed tomography |
| DFOS | distributed fiber-optic sensor |
| DIC | digital image correlation |
| DVC | digital volume correlation |
| FRP | reinforced polymer |
| GPU | graphics processing unit |
| NLM | non-local means |
| ROI | region of interest |
| RMSE | root mean square error |
| VRAM | video random access memory (memory of a graphics card) |
| vx | voxel |
References
- Peled, A.; Bentur, A.; Mobasher, B. Textile Reinforced Concrete, 1st ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar] [CrossRef]
- Beckmann, B.; Adam, V.; Marx, S.; Chudoba, R.; Hegger, J.; Curbach, M. Novel Design Strategies for Material-Minimized Carbon Reinforced Concrete Structures—Overview of the Research in CRC/TRR 280. In Proceedings of the Building for the Future: Durable, Sustainable, Resilient; Ilki, A., Çavunt, D., Çavunt, Y.S., Eds.; Springer: Cham, Switzerland, 2023; pp. 1242–1251. [Google Scholar] [CrossRef]
- Brisard, S.; Serdar, M.; Monteiro, P.J. Multiscale X-ray tomography of cementitious materials: A review. Cem. Concr. Res. 2020, 128, 105824. [Google Scholar] [CrossRef]
- Schulze, S. Radiographie im Bauwesen–Einsatzmöglichkeiten in der Praxis im Rahmen der ZfPBau. Beton-und Stahlbetonbau 2022, 117, 1008–1017. [Google Scholar] [CrossRef]
- Skarźyński, Ł.; Suchorzewski, J. Mechanical and fracture properties of concrete reinforced with recycled and industrial steel fibers using Digital Image Correlation technique and X-ray micro computed tomography. Constr. Build. Mater. 2018, 183, 283–299. [Google Scholar] [CrossRef]
- du Plessis, A.; Boshoff, W.P. A review of X-ray computed tomography of concrete and asphalt construction materials. Constr. Build. Mater. 2019, 199, 637–651. [Google Scholar] [CrossRef]
- Bay, B.K.; Smith, T.S.; Fyhrie, D.P.; Saad, M. Digital Volume Correlation: Three-dimensional Strain Mapping Using X-ray Tomography. Exp. Mech. 1999, 39, 217–226. [Google Scholar] [CrossRef]
- Lorenzoni, R.; Curosu, I.; Léonard, F.; Paciornik, S.; Mechtcherine, V.; Silva, F.A.; Bruno, G. Combined mechanical and 3D-microstructural analysis of strain-hardening cement-based composites (SHCC) by in-situ X-ray microtomography. Cem. Concr. Res. 2020, 136, 106139. [Google Scholar] [CrossRef]
- Suleiman, A.R.; Zhang, L.V.; Nehdi, M.L. Quantifying Crack Self-Healing in Concrete with Superabsorbent Polymers under Varying Temperature and Relative Humidity. Sustainability 2021, 13, 13999. [Google Scholar] [CrossRef]
- Gökçe, H.; Öztürk, B.C.; Çam, N.; Andiç-Çakır, Ö. Gamma-ray attenuation coefficients and transmission thickness of high consistency heavyweight concrete containing mineral admixture. Cem. Concr. Compos. 2018, 92, 56–69. [Google Scholar] [CrossRef]
- Grzesiak, S.; Pahn, M.; Basters, R.; de Sousa, C. Application of the Computed Tomography in Structural Engineering. In Proceedings of the International Symposium of the International Federation for Structural Concrete; Springer: Cham, Switzerland, 2023; pp. 1903–1912. [Google Scholar] [CrossRef]
- Millner, M.R.; Payne, W.H.; Waggener, R.G.; McDavid, W.D.; Dennis, M.J.; Sank, V.J. Determination of effective energies in CT calibration. Med. Phys. 1978, 5, 543–545. [Google Scholar] [CrossRef]
- Giese, J.; Herbers, M.; Liebold, F.; Wagner, F.; Grzesiak, S.; Sousa, C.d.; Pahn, M.; Maas, H.G.; Marx, S.; Curbach, M.; et al. Investigation of the Crack Behavior of CRC Using 4D Computed Tomography, Photogrammetry and Fiber Optic Sensing. Buildings 2023, 13, 2595. [Google Scholar] [CrossRef]
- Wilhelm Kneitz Solutions in Textile. Data sheet of SITgrid040. 2020. Available online: https://solutions-in-textile.com/ (accessed on 4 September 2023).
- Action Composites. Data sheet of Carbon4ReBAR (C4R). 2020. Available online: https://www.action-composites.com/carbon4rebar/ (accessed on 4 September 2023).
- Noo, F.; Defrise, M.; Clackdoyle, R.; Kudo, H. Image reconstruction from fan-beam projections on less than a short scan. Phys. Med. Biol. 2002, 47, 2525. [Google Scholar] [CrossRef]
- Jesse, F.; Kutzner, T. Digitale Photogrammetrie in der Bautechnik: Einfluss wichtiger Systemparameter und Genauigkeitspotenzial in der Praxis. Bautechnik 2013, 90, 703–714. [Google Scholar] [CrossRef]
- Sutton, M.A.; Orteu, J.J.; Schreier, H. Image Correlation for Shape, Motion and Deformation Measurements: Basic Concepts, Theory and Applications, 1st ed.; Springer: Cham, Switzerland, 2009. [Google Scholar] [CrossRef]
- Liebold, F.; Maas, H.G.; Deutsch, J. Photogrammetric determination of 3D crack opening vectors from 3D displacement fields. ISPRS J. Photogramm. Remote Sens. 2020, 164, 1–10. [Google Scholar] [CrossRef]
- Geers, M.G.D.; De Borst, R.; Brekelmans, W.A.M. Computing strain fields from discrete displacement fields in 2D-solids. Int. J. Solids Struct. 1996, 33, 4293–4307. [Google Scholar] [CrossRef]
- Liebold, F.; Maas, H.G. 3D-Deformationsanalyse und Rissdetektion in multitemporalen Voxeldaten von Röntgentomographen. In Proceedings of the Tagungsband der Dreiländertagung der DGPF, OVG und SGPF Photogrammetrie—Fernerkundung—Geoinformation—2022, Dresden, Germany, 5–6 October 2022; Volume 30, pp. 105–116. [Google Scholar] [CrossRef]
- Liebold, F.; Maas, H.G. Computational Optimization of the 3D Least-Squares Matching Algorithm by Direct Calculation of Normal Equations. Tomography 2022, 8, 760–777. [Google Scholar] [CrossRef]
- Dare, P.; Hanley, H.; Fraser, C.; Riedel, B.; Niemeier, W. An Operational Application of Automatic Feature Extraction: The Measurement of Cracks in Concrete Structures. Photogramm. Rec. 2002, 17, 453–464. [Google Scholar] [CrossRef]
- Benz, C.; Rodehorst, V. Model-based Crack Width Estimation using Rectangle Transform. In Proceedings of the 2021 17th International Conference on Machine Vision and Applications (MVA), Online, 25–27 July 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Carrasco, M.; Araya-Letelier, G.; Velázquez, R.; Visconti, P. Image-Based Automated Width Measurement of Surface Cracking. Sensors 2021, 21, 7534. [Google Scholar] [CrossRef]
- Barisin, T.; Jung, C.; Müsebeck, F.; Redenbach, C.; Schladitz, K. Methods for segmenting cracks in 3d images of concrete: A comparison based on semi-synthetic images. Pattern Recognit. 2022, 129, 108747. [Google Scholar] [CrossRef]
- Terol-Villalobos, I.R. Morphological image enhancement and segmentation. Adv. Imaging Electron Phys. 2001, 118, 207–273. [Google Scholar] [CrossRef]
- Vicente, M.A.; González, D.C.; Mínguez, J. Recent advances in the use of computed tomography in concrete technology and other engineering fields. Micron 2019, 118, 22–34. [Google Scholar] [CrossRef]
- Khormani, M.; Jaari, V.R.K.; Aghayan, I.; Ghaderi, S.H.; Ahmadyfard, A. Compressive strength determination of concrete specimens using X-ray computed tomography and finite element method. Constr. Build. Mater. 2020, 256, 119427. [Google Scholar] [CrossRef]
- DIN EN 1992-1-1:2011-01; Eurocode 2 Design of Concrete Structures—Part 1-1: General Rules and Rules for Buildings; German version EN 1992-1-1:2004 + AC:2010. Deutsches Institut für Normung e.V.: Berlin, Germany, 2011.
- Deutscher Ausschuss für Stahlbeton. DAfStb-Richtlinie Betonbauteile mit nichtmetallischer Bewehrung; Draft Guideline; Deutscher Ausschuss für Stahlbeton: Berlin, Germany, 2022. [Google Scholar]
- Kalthoff, M.; Raupach, M.; Matschei, T. Investigation into the Integration of Impregnated Glass and Carbon Textiles in a Laboratory Mortar Extruder (LabMorTex). Materials 2021, 14, 7406. [Google Scholar] [CrossRef] [PubMed]
- Alsayed, S.H.; Amjad, M.A. Strength, Water Absorption and Porosity of Concrete Incorporating Natural and Crushed Aggregate. J. King Saud Univ.-Eng. Sci. 1996, 8, 109–119. [Google Scholar] [CrossRef]
- Claisse, P.A.; Cabrera, J.G.; Hunt, D.N. Measurement of porosity as a predictor of the durability performance of concrete with and without condensed silica fume. Adv. Cem. Res. 2001, 13, 165–174. [Google Scholar] [CrossRef]
- Schukraft, J.; Lohr, C.; Weidenmann, K.A. Approaches to X-ray CT Evaluation of In-Situ Experiments on Damage Evolution in an Interpenetrating Metal-Ceramic Composite with Residual Porosity. Appl. Compos. Mater. 2023, 30, 815–831. [Google Scholar] [CrossRef]
- Çiçek, Ö.; Abdulkadir, A.; Lienkamp, S.S.; Brox, T.; Ronneberger, O. 3D U-Net: Learning Dense Volumetric Segmentation from Sparse Annotation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2016; Ourselin, S., Joskowicz, L., Sabuncu, M.R., Unal, G., Wells, W., Eds.; Springer: Cham, Switzerland, 2016; pp. 424–432. [Google Scholar] [CrossRef]
- Wagner, F.; Maas, H.G. A Comparative Study of Deep Architectures for Voxel Segmentation in Volume Images. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2023, in press.
- Wagner, F.; Mester, L.; Klinkel, S.; Maas, H.G. Analysis of Thin Carbon Reinforced Concrete Structures through Microtomography and Machine Learning. Buildings 2023, 13, 2399. [Google Scholar] [CrossRef]
- Taha, A.A.; Hanbury, A. Metrics for evaluating 3D medical image segmentation: Analysis, selection, and tool. BMC Med. Imaging 2015, 15, 29. [Google Scholar] [CrossRef]





















| Load Step | Experiment 1 | Experiment 2 |
|---|---|---|
| 0 | 0 kN | 0 kN |
| 1 | 2 kN | 2 kN |
| 2 | 4 kN | 6 kN |
| 3 | 6 kN | 12 kN |
| 4 | - | 18 kN |
| Grid [14] | Rebar [15] | |||
|---|---|---|---|---|
| Warp Direction | Weft Direction | |||
| Axial yarn spacing | in mm | 12.7 | 16.0 | |
| Cross-sectional area (yarn/rebar) | in mm | 1.81 | 0.45 | 57 |
| Ultimate tensile strength | in MPa | 2200 | 1650 | |
| Ultimate strain | in ‰ | 11.3 | 11.0 | |
| Modulus of elasticity | in MPa | 195,000 | 151,000 | |
| Load | 2 kN | 6 kN | 12 kN | 18 kN | ||||
|---|---|---|---|---|---|---|---|---|
| Label | 2A | 2B | 2A | 2B | 2A | 2B | 2A | 2B |
| 1 | 0.025 | 0.035 | 0.052 | 0.059 | 0.057 | 0.081 | ||
| 2 | 0.018 | 0.048 | 0.092 | 0.030 | 0.126 | |||
| 3 | 0.027 | 0.034 | 0.053 | 0.066 | 0.062 | 0.100 | ||
| 4 | 0.016 | 0.019 | 0.039 | 0.025 | 0.069 | 0.048 | 0.072 | |
| 5 | 0.028 | 0.059 | 0.030 | |||||
| 6 | 0.013 | 0.039 | 0.035 | 0.067 | 0.053 | 0.081 | 0.066 | |
| 7 | 0.030 | 0.017 | 0.053 | 0.029 | 0.083 | 0.032 | ||
| 8 | 0.017 | 0.033 | 0.022 | 0.064 | 0.048 | |||
| 9 | 0.012 | 0.026 | 0.053 | |||||
| Load Step 2 (4 kN) | Load Step 3 (6 kN) | |||
|---|---|---|---|---|
| Crack Label | 1A in mm | 1B in mm | 1A in mm | 1B in mm |
| 1 | 0.066 | 0.023 | ||
| 2 | 0.004 | 0.016 | −0.020 | 0.071 |
| 3 | 0.004 | 0.062 | ||
| 4 | 0.113 | |||
| Load Step 2 (4 kN) | Load Step 3 (6 kN) | |||
|---|---|---|---|---|
| Crack Label | 1A in mm () | 1B in mm () | 1A in mm () | 1B in mm () |
| 1 | 0.67 (0.17) | 0.52 (0.15) | ||
| 2 | 0.49 (0.13) | 0.49 (0.14) | 0.55 (0.20) | 0.48 (0.13) |
| 3 | 0.55 (0.17) | 0.59 (0.15) | ||
| 4 | 0.62 (0.21) | |||
| Load Step 2 (4 kN) | Load Step 3 (6 kN) | |||
|---|---|---|---|---|
| Crack Label | 1A in mm | 1B in mm | 1A in mm | 1B in mm |
| 1 | 0.477 | 0.266 | ||
| 2 | 0.236 | 0.278 | 0.282 | 0.162 |
| 3 | 0.323 | 0.374 | ||
| 4 | 0.446 | |||
| Mean Concrete Cover in mm | |||||
|---|---|---|---|---|---|
| 1A | 1B | 2A | 2B | 2C | 2D |
| 6.20 | 5.74 | 5.97 | 6.67 | 6.94 | 7.41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liebold, F.; Wagner, F.; Giese, J.; Grzesiak, S.; de Sousa, C.; Beckmann, B.; Pahn, M.; Marx, S.; Curbach, M.; Maas, H.-G. Damage Analysis and Quality Control of Carbon-Reinforced Concrete Beams Based on In Situ Computed Tomography Tests. Buildings 2023, 13, 2669. https://doi.org/10.3390/buildings13102669
Liebold F, Wagner F, Giese J, Grzesiak S, de Sousa C, Beckmann B, Pahn M, Marx S, Curbach M, Maas H-G. Damage Analysis and Quality Control of Carbon-Reinforced Concrete Beams Based on In Situ Computed Tomography Tests. Buildings. 2023; 13(10):2669. https://doi.org/10.3390/buildings13102669
Chicago/Turabian StyleLiebold, Frank, Franz Wagner, Josiane Giese, Szymon Grzesiak, Christoph de Sousa, Birgit Beckmann, Matthias Pahn, Steffen Marx, Manfred Curbach, and Hans-Gerd Maas. 2023. "Damage Analysis and Quality Control of Carbon-Reinforced Concrete Beams Based on In Situ Computed Tomography Tests" Buildings 13, no. 10: 2669. https://doi.org/10.3390/buildings13102669