
Central Load-Bearing Control in the Construction Process of the Concrete Spherical Joint Nandu River Swing Bridge: A Case Study



Abstract
:1. Introduction
2. Mechanical Problems of the Superstructure
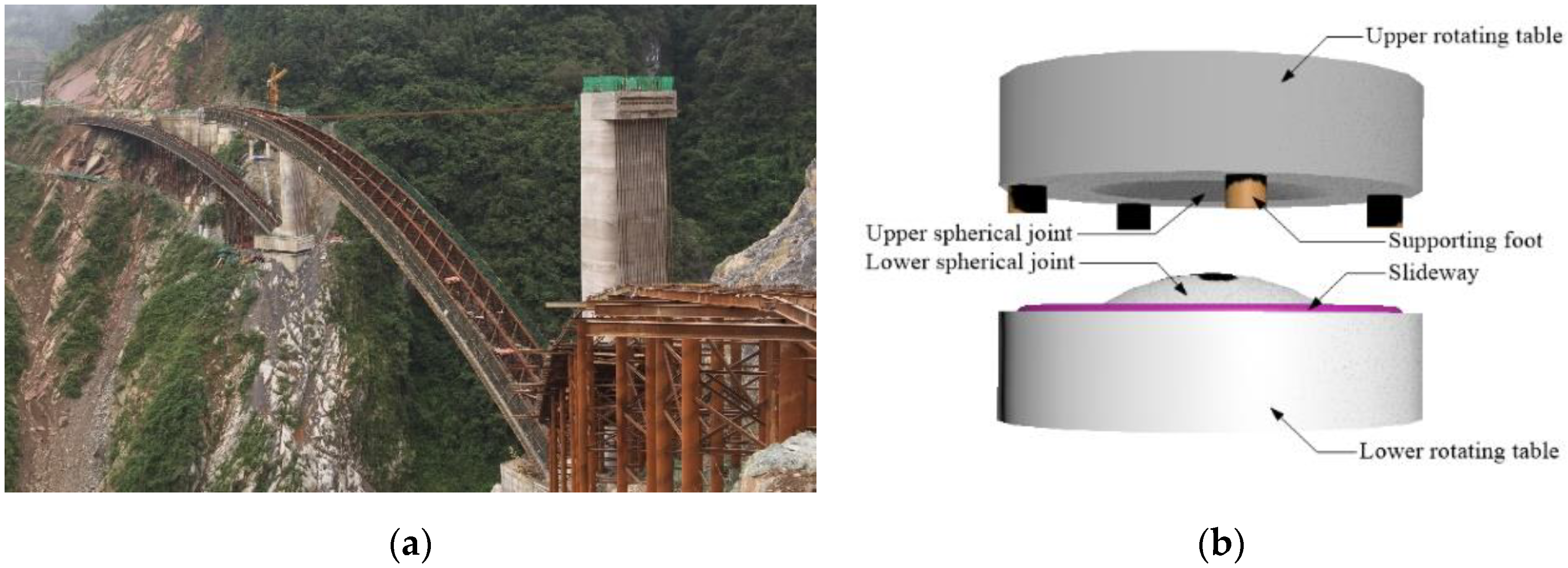
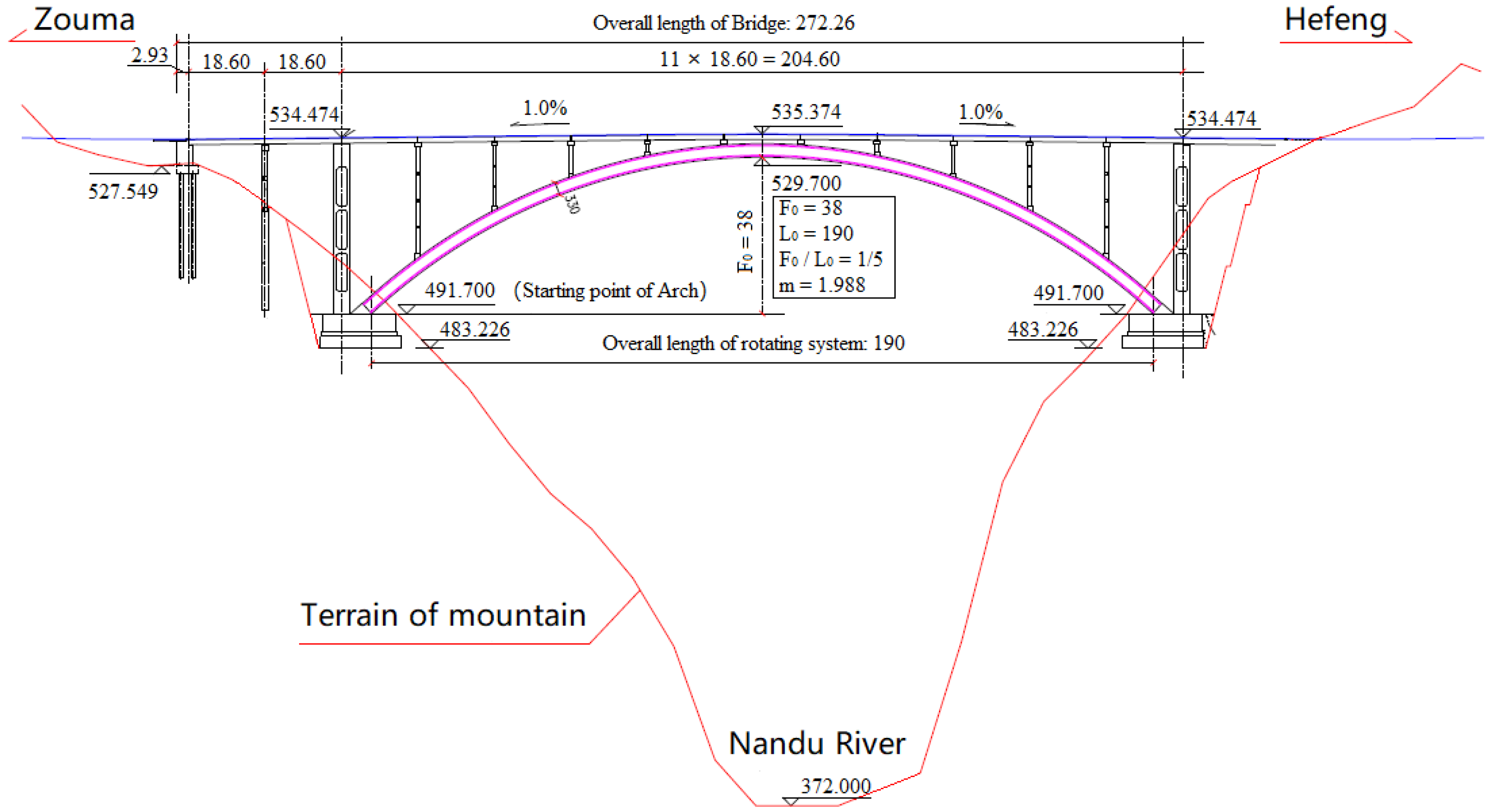
2.1. Case Study Description
2.2. Construction Process of the Superstructure
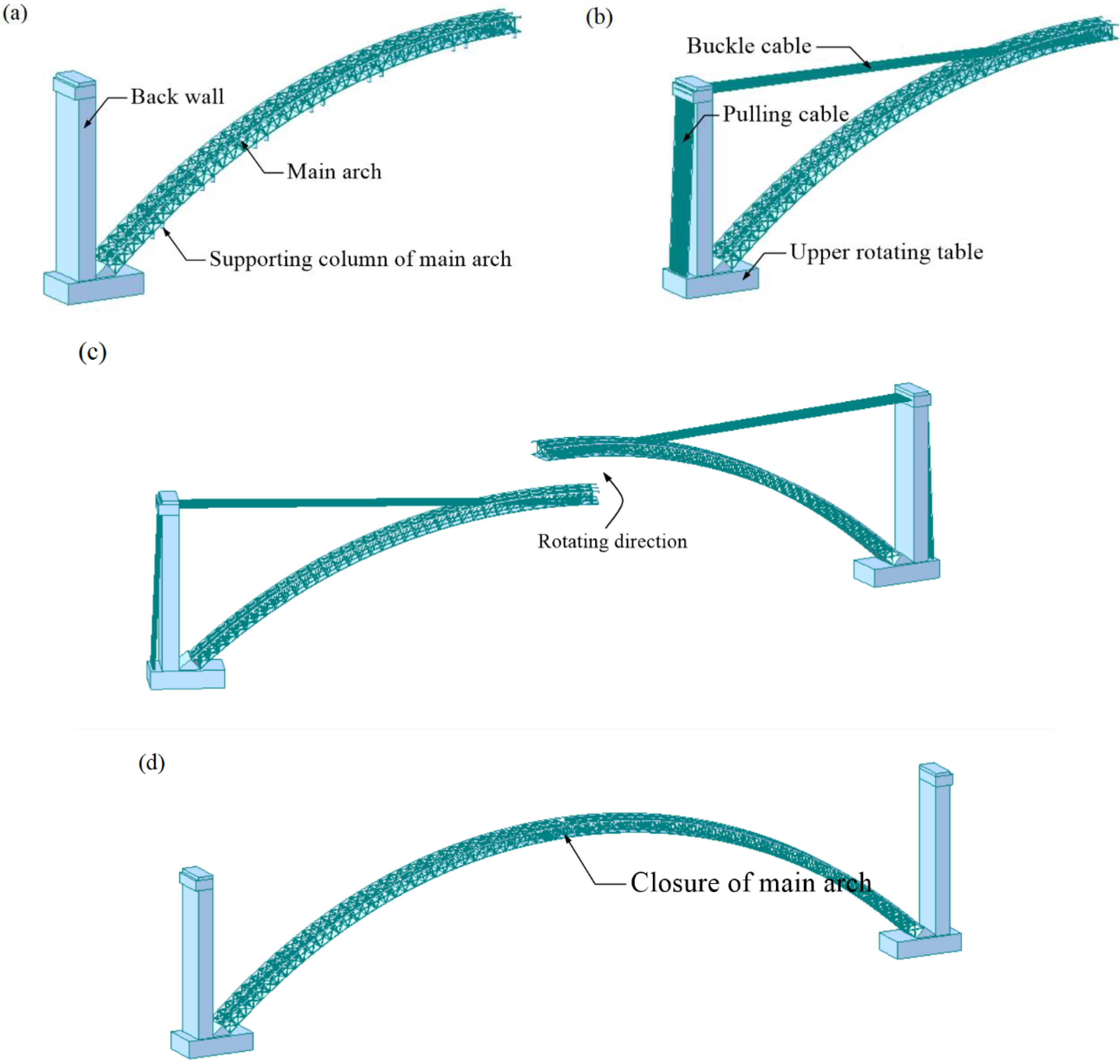
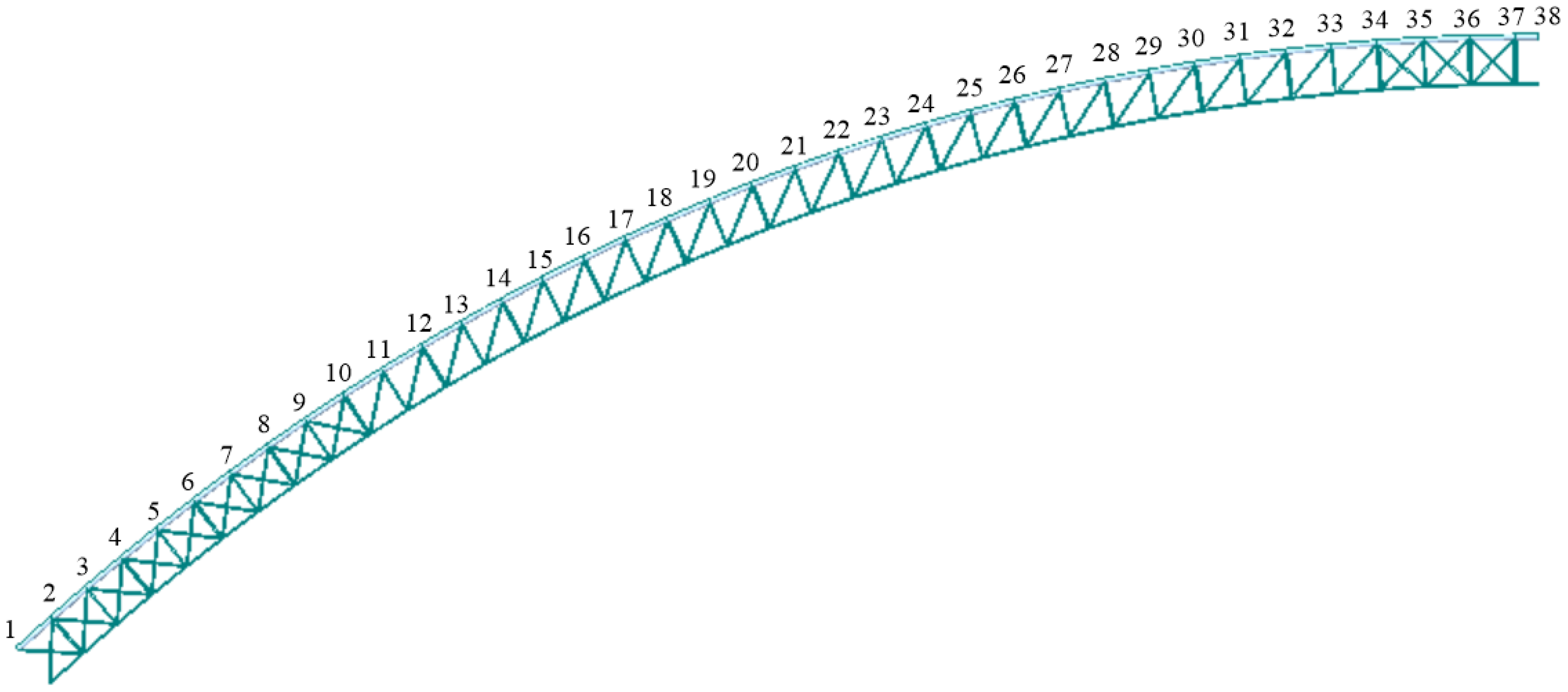
- The main arch is built along the surrounding mountainous terrain (Figure 3a);
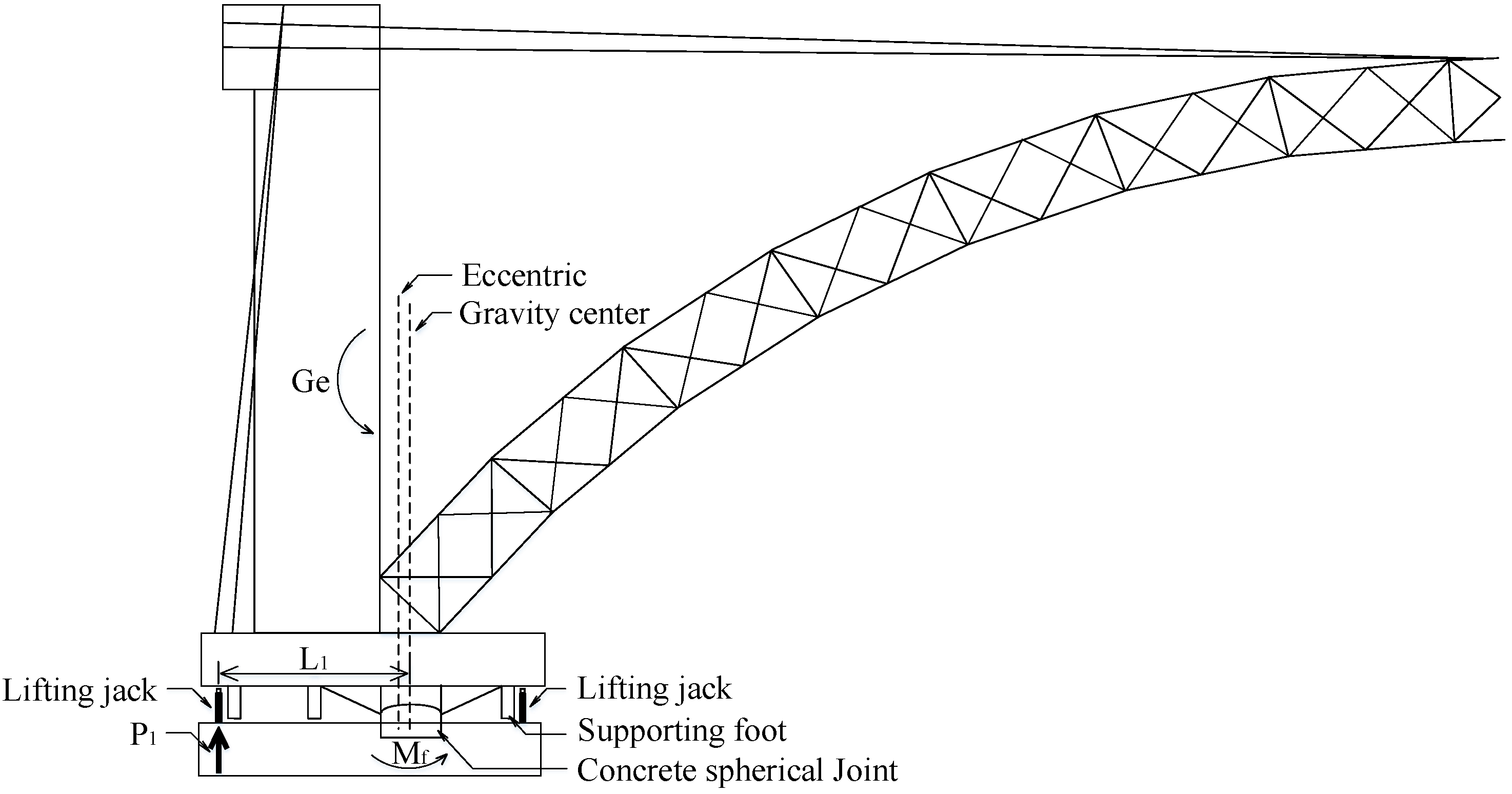
- After the tension of the buckle cable and pulling cable, the entire rotating system is supported by the concrete spherical joint. If the gravity center of the system coincides with the axis of the concrete spherical joint, the system is only held up by the upward force of the concrete spherical joint. The overturning resistance of the entire system is kept in a low-security state; therefore, the closure procedure needs to be implemented immediately (Figure 3b);
- In terms of the rotating process of the swing bridge (Figure 3c), the rotating systems are derived from horizontal lifting jacks at the upper rotating table in no-wind weather;
- Structural stiffness increases after the closure and the dismantlement of the cable, and the structure is in a stable state (Figure 3d). The entire structural weight is forced by the arch foot, forming the non-hinged arch. Under the action of self-weight and external load, the bending moment distribution in the arch is uniformly distributed along the main arch;
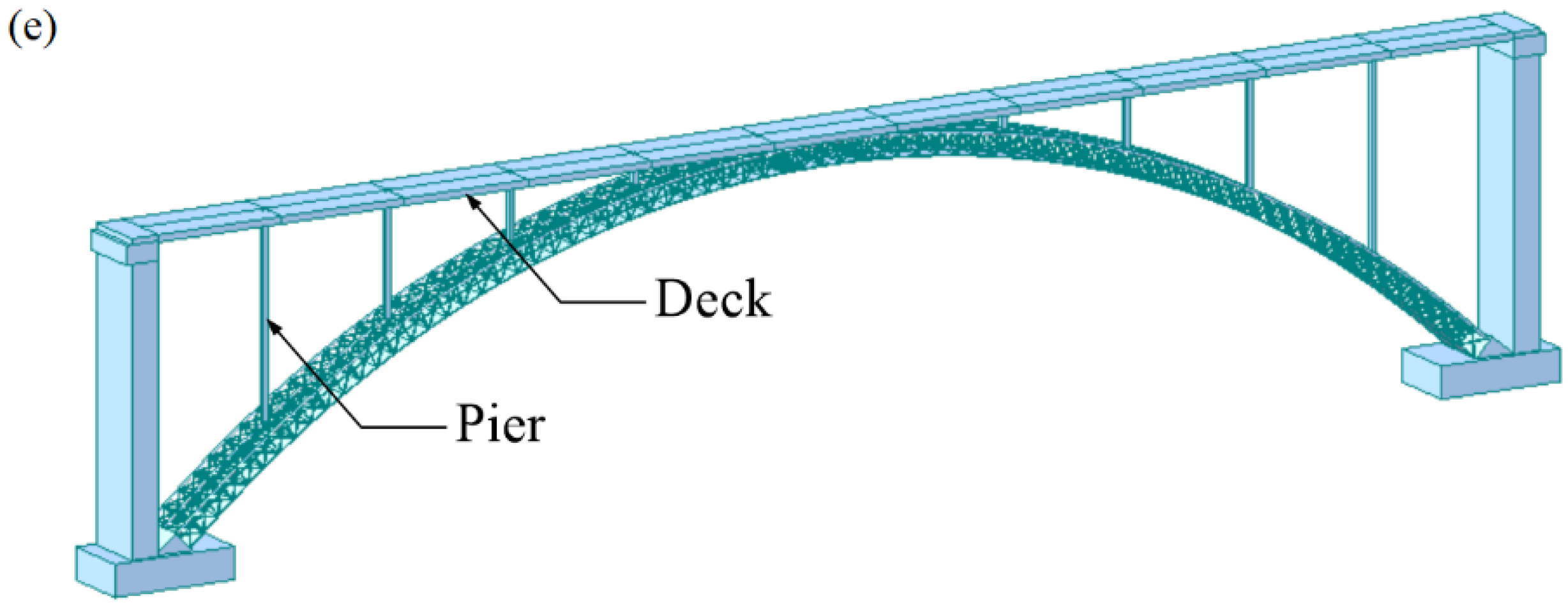
- The pier founded on the main arch and the bridge deck are cast during the programmatic process, and the ancillary facilities are installed in sequence (Figure 3e).
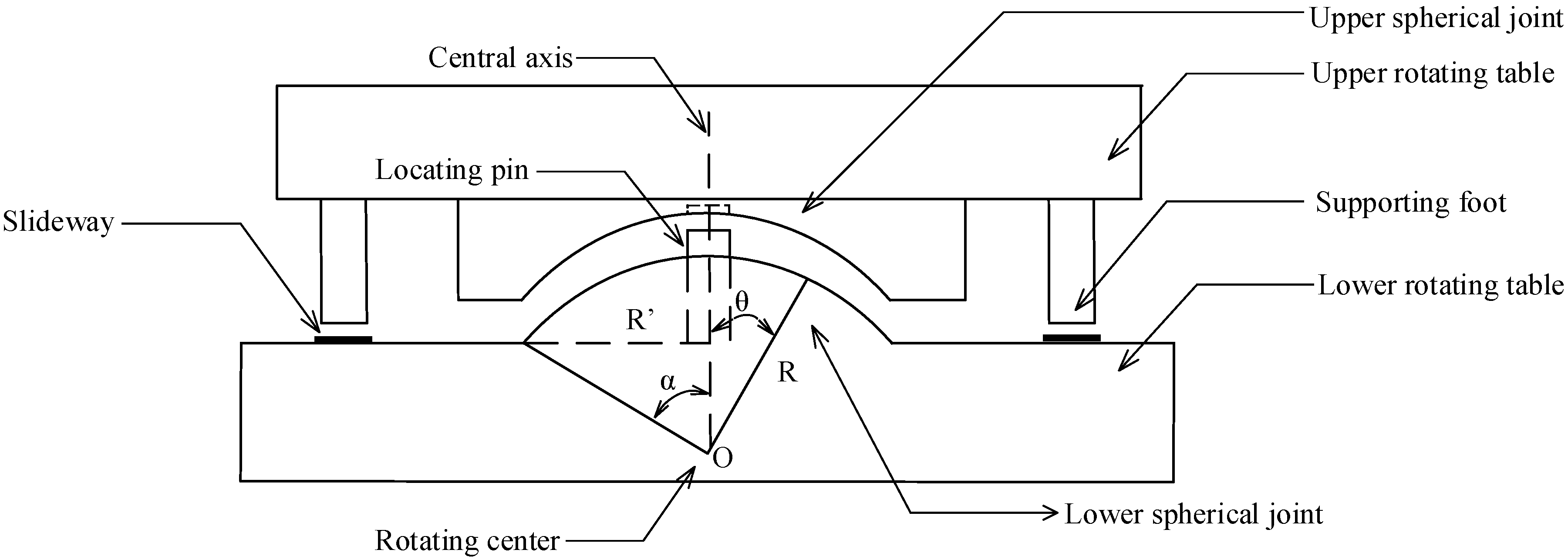
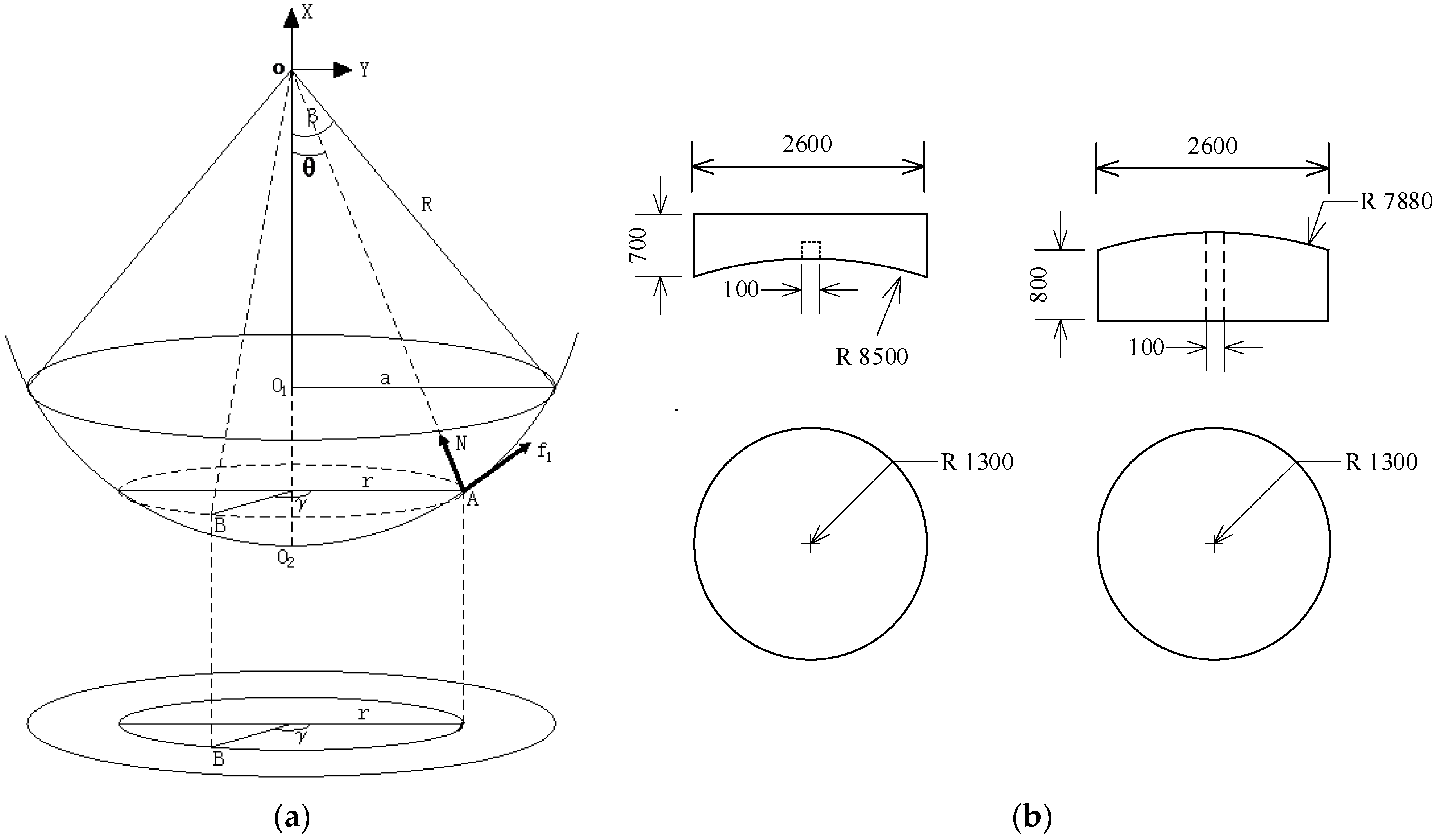
2.3. Construction Process of the Concrete Spherical Joint
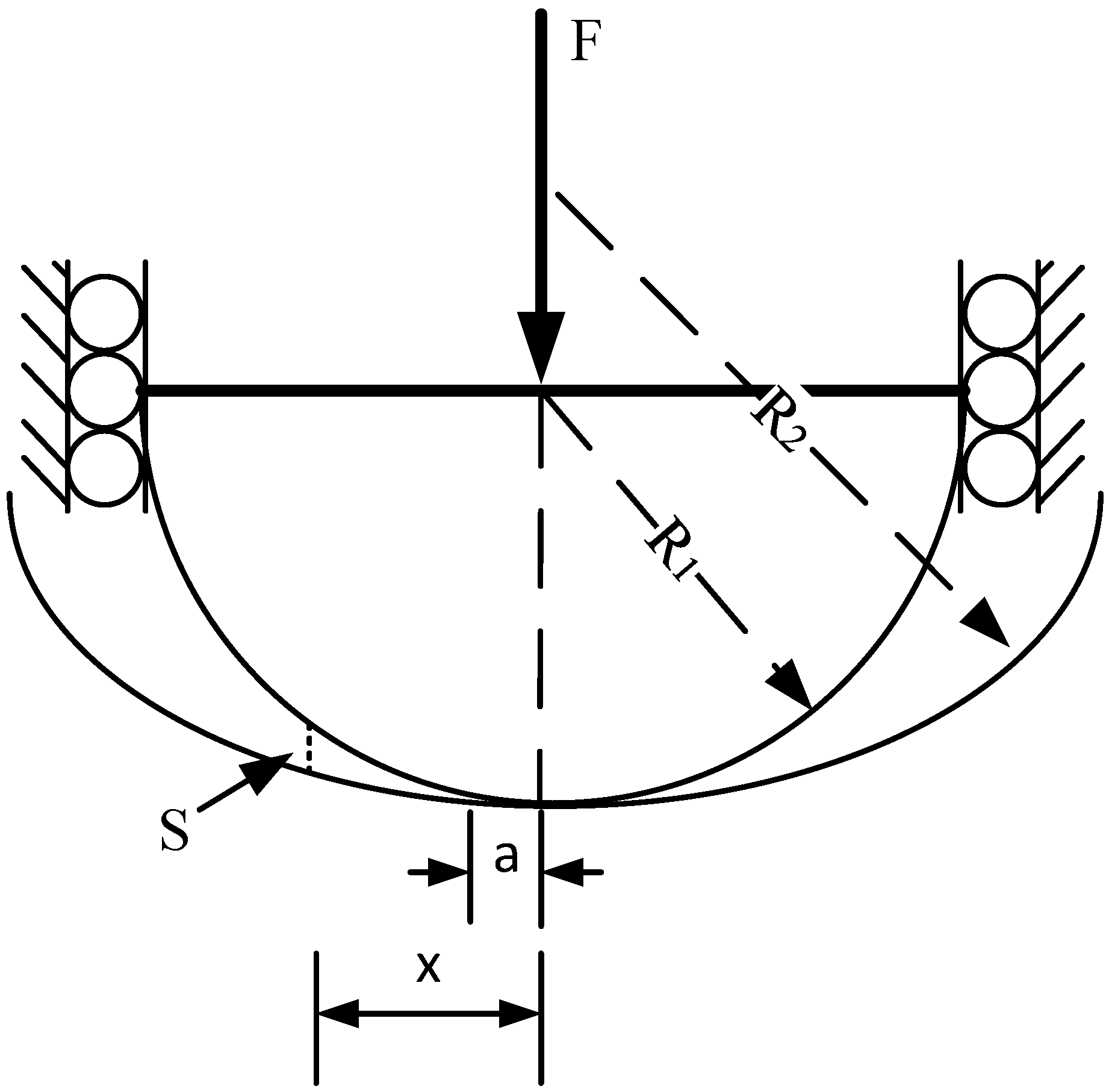
2.4. Non-Hertz Contact Theory of the Concrete Spherical Joint
3. Cable Tension
3.1. Objective of Cable Tension
3.2. Results of Cable Tension
4. Gravity Center Test
4.1. Mechanism of Gravity Center Test
4.1.1. Frictional Moment Larger Than the Unbalanced Moment
4.1.2. Frictional Moment Less Than the Unbalanced Moment
4.2. Analysis of Engineering Results
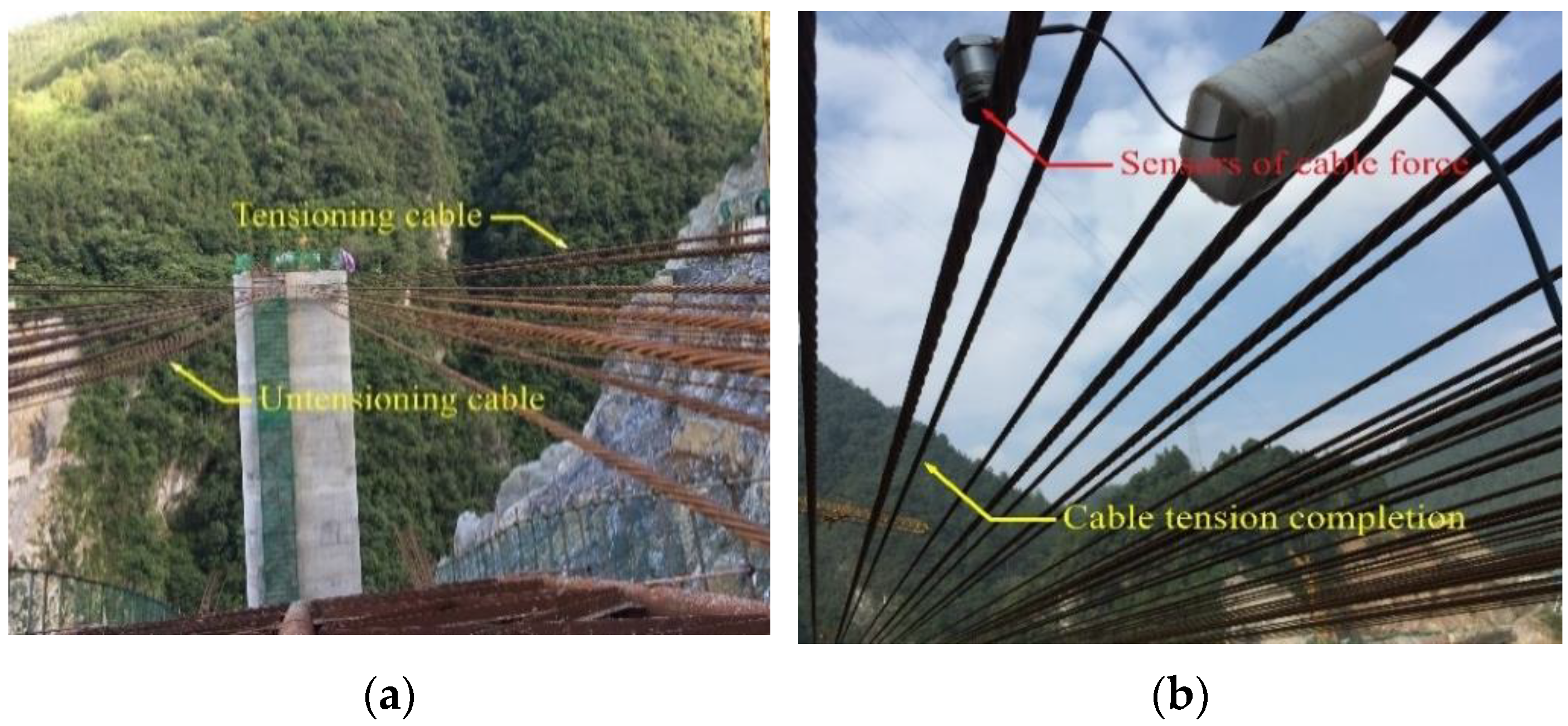
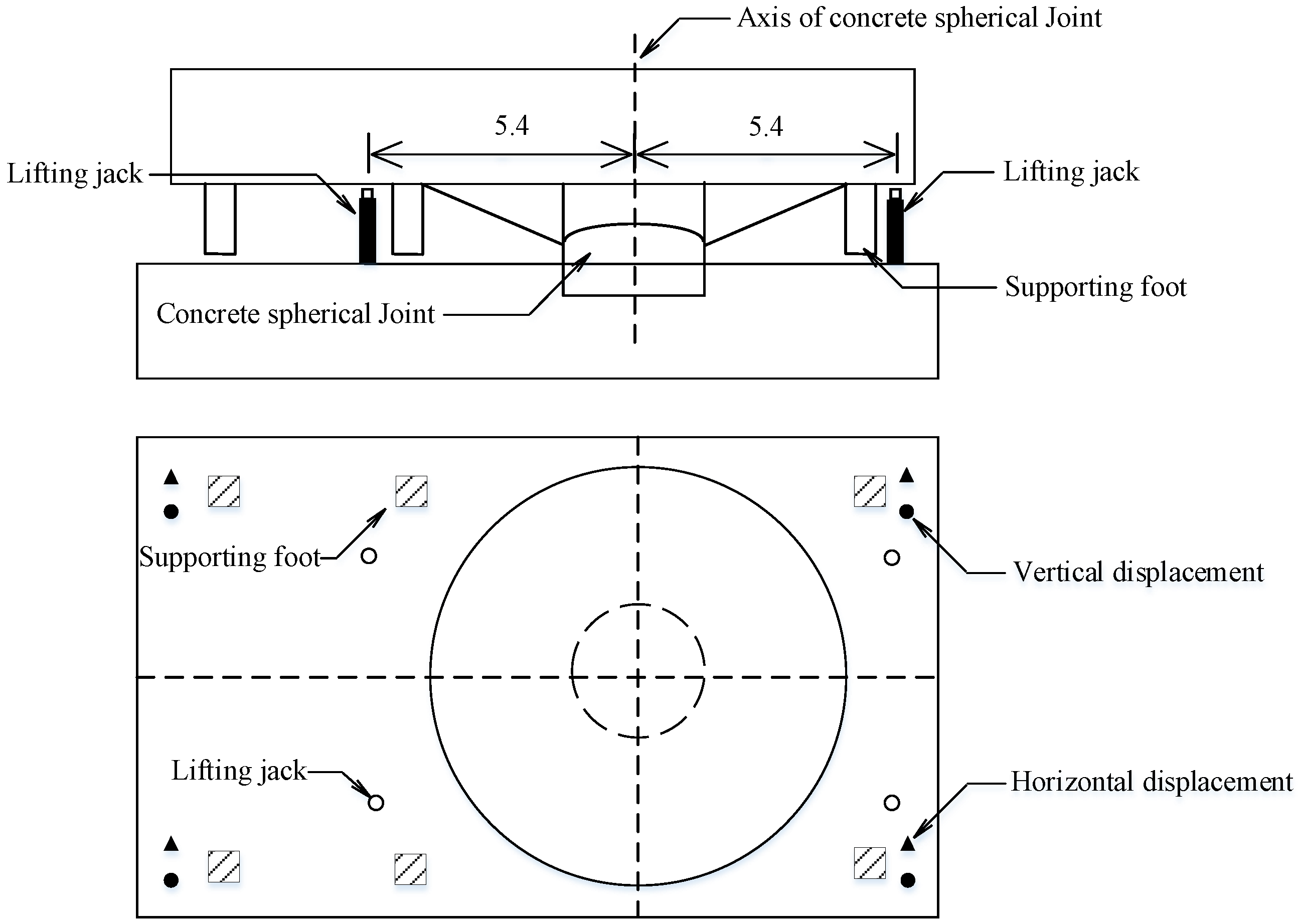
4.2.1. Measuring Sensors
4.2.2. Position of Sensors
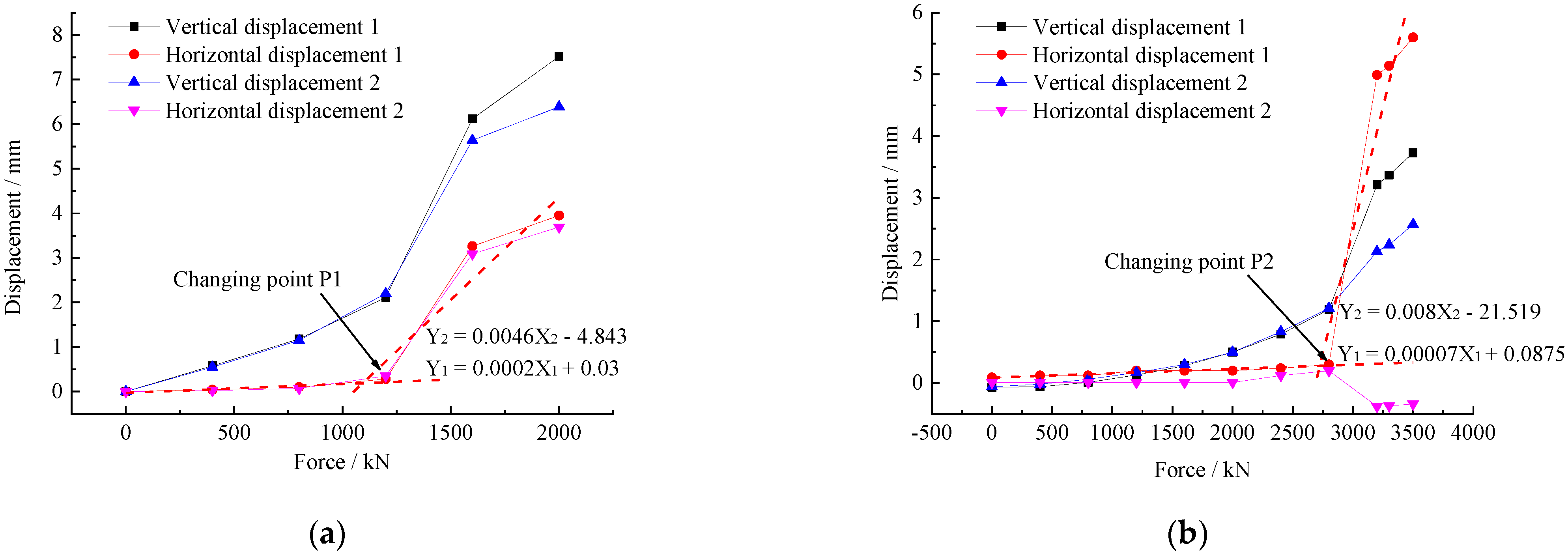
4.2.3. Gravity Center Test Results
5. Stability Control of the Rotating Construction
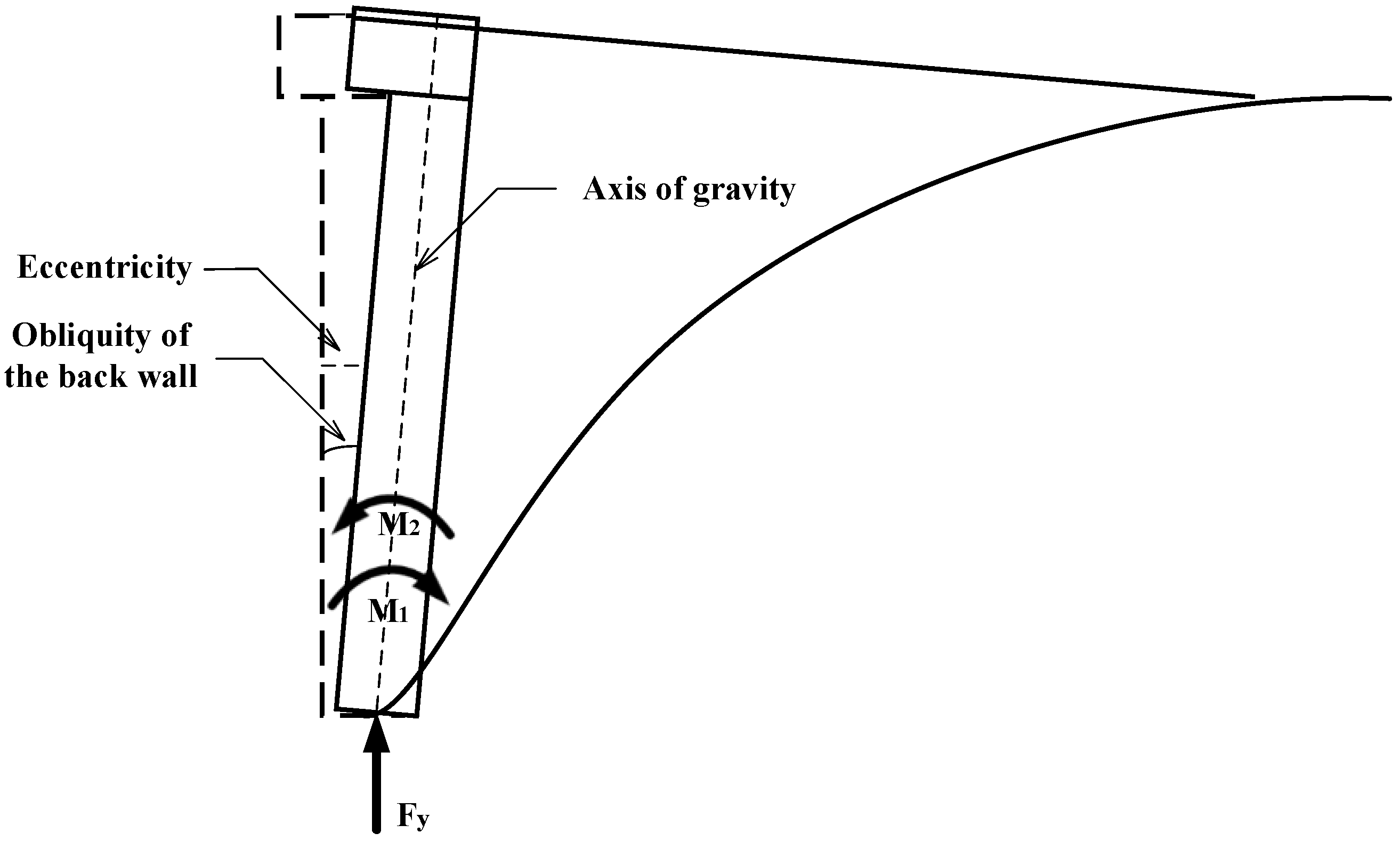
5.1. Overturning Moment of Rotating Construction
5.2. Formula Deduction of Overturning Moment Resistance
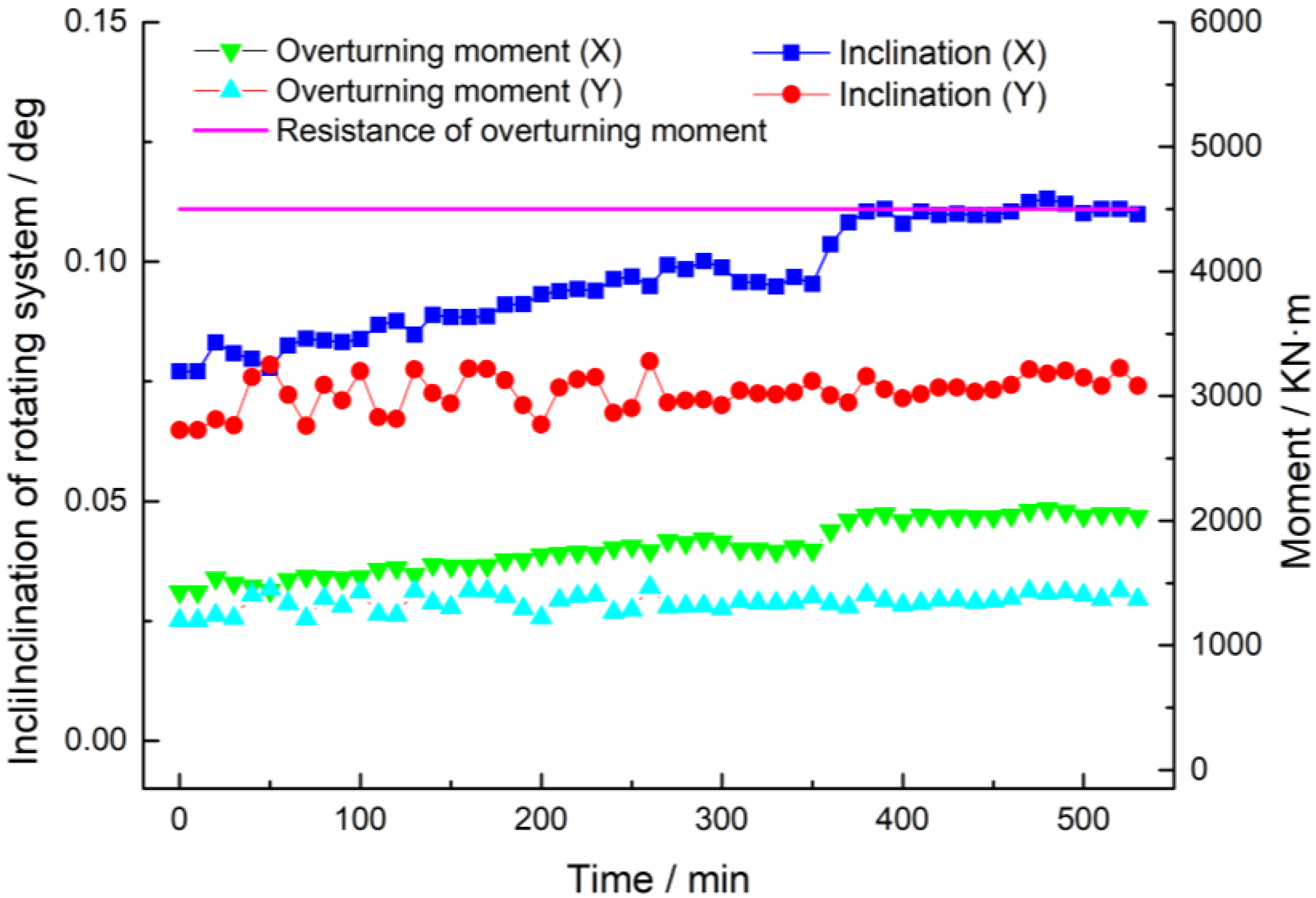
5.3. Inclination Analysis of Rotating Construction
6. Recommendations for Practice
- The arch rib can be entirely removed from the frame after the cable tension stages. However, the deformation of the main arch, especially vertical deformation, is obvious during the cable tension period. Therefore, the linear changes to the main arch throughout the tensioning process must be continuously monitored. This guarantees the linear shape of the main arch after cable tension, achieving the aim of structural safety;
- During the gravity center test, the displacement of the upper rotating table has to be monitored continuously in real time. The lifting process by the lifting jack should stop immediately once the changing point appears. This prevents the overload of the lifting jack resulting in the overturn of the rotating system;
- The inclination of the rotating system should be tracked in real time during the rotating construction of the main arch. The stability of the rotating system entirely depends on the fractional moment of the spherical joint. Thus, the central load-bearing state of the rotating system is significant to decrease the overturning moment.
7. Discussion and Conclusions
- The non-Hertz contact theory can be properly utilized to calculate the spherical joint stress distribution. It can be used to reach central load-bearing control when calculating the surface contact stress distribution of the spherical joint;
- Special attention to the middle position of the main arch is recommended during the cable tensioning process, since this is the most dangerous position during the procedure;
- The key problem of the gravity center test is to determine the changing point during the lifting process, as this is the most important process before the rotating construction. It enables the balance of the rotating system to be established, guaranteeing load-bearing control;
- Overturning moments are monitored by the inclination tracking system and calculated by the deduced formula based on the non-Hertz contact theory. This guarantees the safety of the rotating construction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, C.; Wen, J.; Han, Q.; Du, X.; Lai, Z.; Fu, G. Transverse seismic response of diamond-shaped pylon in cable-stayed bridge: Experiment and analysis. Eng. Struct. 2022, 250, 113414. [Google Scholar] [CrossRef]
- Liu, T.; Fan, J.; Peng, Z.; Liu, Z. Modified Algorithm of Anchor Cable Force in a Suspension Bridge Based on the Cable-beam Composite Structure. J. Highw. Transp. Res. Dev. 2020, 14, 38–44. [Google Scholar] [CrossRef]
- Zheng, J.; Wang, J. Concrete-Filled Steel Tube Arch Bridges in China. Engineering 2018, 4, 143–155. [Google Scholar] [CrossRef]
- Fuchs, N.; Tomlinson, K.; Buckby, R. El Ferdan Bridge, Egypt: The world’s longest swing bridge. Bridg. Eng. 2003, 156, 21–30. [Google Scholar] [CrossRef]
- Griggs, F.E. American swing bridges 1797 to 1907. Pract. Period. Struct. Des. Constr. 2011, 16, 170–185. [Google Scholar] [CrossRef]
- Li, W.; Huang, C.; Tang, C. Negative angle vertical rotating construction method of reinforced concrete arch bridge. Struct. Eng. Int. J. Int. Assoc. Bridg. Struct. Eng. 2017, 27, 558–562. [Google Scholar] [CrossRef]
- Liang, D.; Yao, C.; Liu, S. Structural type selection for long-span bridges in mountain area. Appl. Mech. Mater. 2013, 256–259, 1596–1600. [Google Scholar] [CrossRef]
- Liu, T.; Yu, Q.; Fan, J.; Peng, Z.; Wang, E. Concrete spherical joint contact stress distribution and overturning moment of swing bridge. Structures 2020, 28, 1187–1195. [Google Scholar] [CrossRef]
- Ye, X.W.; Xia, P.S.; Su, Y.H.; Chen, B. Analysis and probabilistic modeling of wind characteristics of an arch bridge using structural health monitoring data during typhoons. Struct. Eng. Mech. 2017, 63, 809–824. [Google Scholar] [CrossRef]
- Li, Q.H.; Wang, X.Y.; Han, L.L. Analysis on vertical swivel construction of cable-stayed bridge with steel arch pylon. Appl. Mech. Mater. 2014, 477–478, 635–639. [Google Scholar] [CrossRef]
- Alocci, C.; Valvo, P.S. Feasibility study of a hybrid FRP-steel cable-stayed pedestrian swing bridge. Eng. Struct. 2019, 189, 359–372. [Google Scholar] [CrossRef]
- Sun, Z.; Hao, C. Conformal Contact Problems of Ball-socket and Ball. Phys. Procedia 2012, 25, 209–214. [Google Scholar] [CrossRef] [Green Version]
- Liu, T. Research on the Key Problems of Concrete Sphere Hinge in the Rotating Construction of Long-Span Bridge. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2018. (In Chinese). [Google Scholar]
- Watanabe, E.; Maruyama, T.; Tanaka, H.; Takeda, S. Design and construction of a floating swing bridge in Osaka. Mar. Struct. 2000, 13, 437–458. [Google Scholar] [CrossRef]
- Fang, X.; Zhang, C.; Chen, X.; Wang, Y.; Tan, Y. A new universal approximate model for conformal contact and non-conformal contact of spherical surfaces. Acta Mech. 2015, 226, 1657–1672. [Google Scholar] [CrossRef]
- Fan, J.F.; Liu, T.; Peng, Z.Q.; Liu, Z.; Yin, Y.X.; Sheng, Y.Q. Stress Distribution Analysis of Sphere Hinges of Swing Bridge Based on Non-Hertz Contact Theory. Wuhan Ligong Daxue Xuebao/J. Wuhan Univ. Technol. 2018, 40, 48–52. [Google Scholar] [CrossRef]
- Fagan, M.J.; McConnachie, J. A review and detailed examination of non-layered conformal contact by finite element analysis. J. Strain Anal. Eng. Des. 2001, 36, 177–195. [Google Scholar] [CrossRef]
- Liu, C.S.; Zhang, K.; Yang, L. Normal force-displacement relationship of spherical joints with clearances. J. Comput. Nonlinear Dyn. 2006, 1, 160–167. [Google Scholar] [CrossRef]
- JTG/T F50-2001; Technical Specification for Construction of Highway Bridge and Culvert. China Communications Press Co., Ltd.: Beijing, China, 2011.
- Quaranta, G.; Marano, G.C.; Trentadue, F.; Monti, G. Numerical study on the optimal sensor placement for historic swing bridge dynamic monitoring. Struct. Infrastruct. Eng. 2014, 10, 57–68. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage of Cable Tension | Cable Force/kN | Displacement of the Top Back Wall (Horizontal: mm) | Displacement of Main Arch (Vertical: mm) | |||||
|---|---|---|---|---|---|---|---|---|
| Pulling Cable | Buckle Cable | 10 | 19 | 27 | 36 | 38 | ||
| a | 11,000 | 0.3 | −22.3 | 0.0 | −0.9 | −1.3 | −1.8 | 0.7 |
| b | 10,600 | 2500 | 20.0 | 0.0 | −0.4 | −0.8 | −1.1 | 0.4 |
| c | 31,500 | 2500 | −20.1 | 0.0 | −0.4 | −0.8 | −1.1 | 0.4 |
| d | 31,500 | 5000 | 22.2 | 0.0 | 0.0 | −0.2 | −0.5 | 0.0 |
| e | 43,500 | 5000 | −1.3 | 0.0 | 0.0 | −0.2 | −0.5 | 0.0 |
| f | 43,500 | 6490 | 23.9 | 26.6 | 80.9 | 78.9 | 9.6 | −5.2 |
| g | 49,500 | 6500 | 12.4 | 27.1 | 82.1 | 80.0 | 9.8 | −5.3 |
| h | 49,500 | 7140 | 23.2 | 48.9 | 133.8 | 128.8 | 15.8 | −8.4 |
| i | 52,500 | 7150 | 17.5 | 49.2 | 134.4 | 129.4 | 15.9 | −8.4 |
| j | 52,500 | 7500 | 23.4 | 60.9 | 162.3 | 155.8 | 19.2 | 10.1 |
| k | 52,540 | 7580 | 24.8 | 60.2 | 156.9 | 141.3 | 10.1 | 42.2 |
| Parameters | Value | Unit | Note |
|---|---|---|---|
| L | 5.4 | m | Lifting arm |
| P2 | 2695.79 | kN | |
| P1 | 1107.5 | kN | |
| G | 59,600 | kN | |
| R | 8.5 | m | Spherical radius |
| Unbalanced moment Mg | 4291.2 | kN·m | |
| Friction moment Mf | 10,268.883 | kN·m | |
| Eccentric e | 0.072 | m | Deflect to back wall |
| Factors | Frictional Coefficient μ | The Height of Gravity | Gravitation of the Rotating System |
|---|---|---|---|
| 0.1 | 17.802 m | 59,600 kN |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Fan, J.; Peng, Z. Central Load-Bearing Control in the Construction Process of the Concrete Spherical Joint Nandu River Swing Bridge: A Case Study. Buildings 2022, 12, 511. https://doi.org/10.3390/buildings12050511
Liu T, Fan J, Peng Z. Central Load-Bearing Control in the Construction Process of the Concrete Spherical Joint Nandu River Swing Bridge: A Case Study. Buildings. 2022; 12(5):511. https://doi.org/10.3390/buildings12050511
Chicago/Turabian StyleLiu, Tao, Jianfeng Fan, and Ziqiang Peng. 2022. "Central Load-Bearing Control in the Construction Process of the Concrete Spherical Joint Nandu River Swing Bridge: A Case Study" Buildings 12, no. 5: 511. https://doi.org/10.3390/buildings12050511