
Nonlinear Modeling of RC Substandard Beam–Column Joints for Building Response Analysis in Support of Seismic Risk Assessment and Loss Estimation

 , ,
, ,  ,
,
Abstract
:1. Introduction
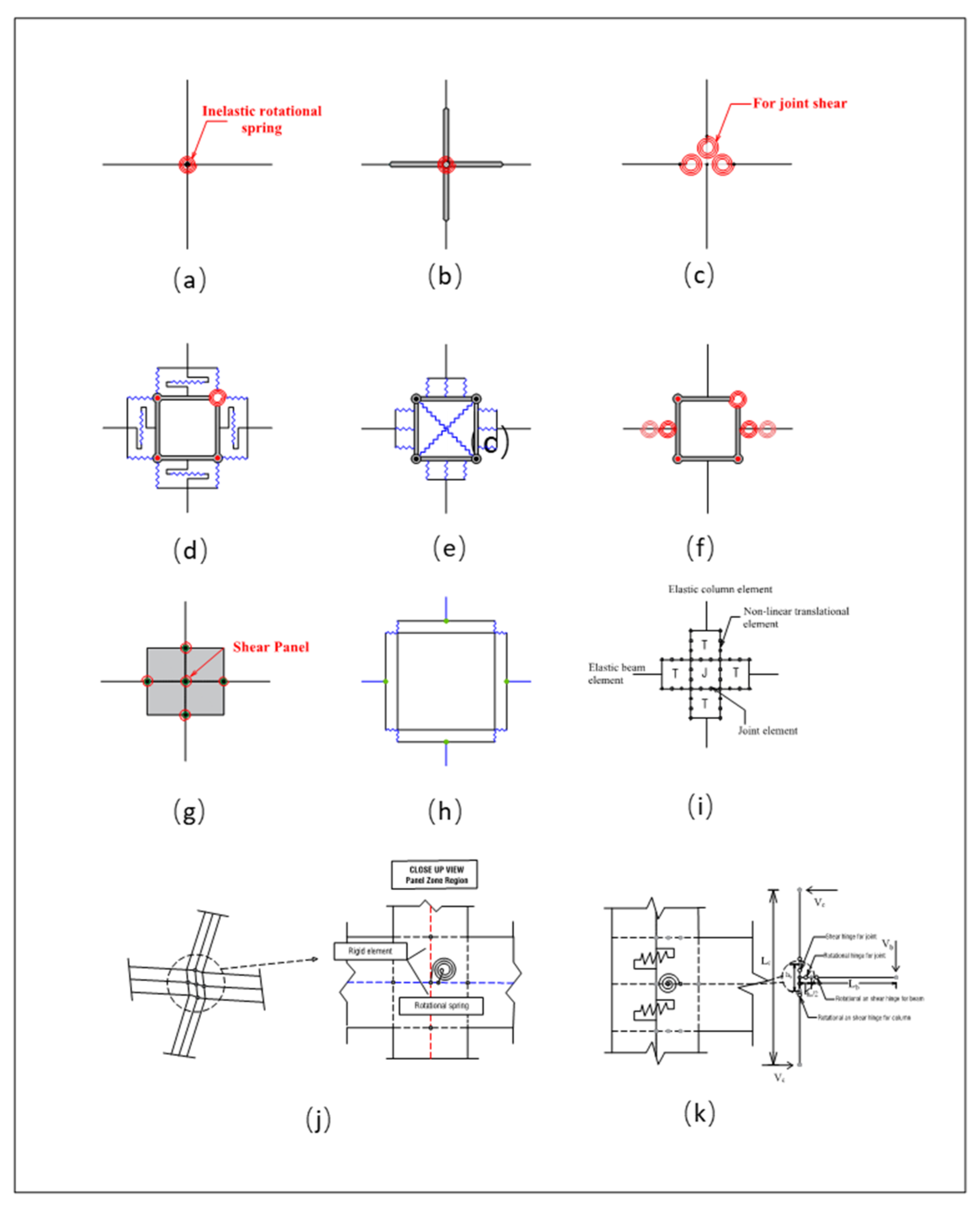
2. Critical Review of Simplified Nonlinear Modeling Techniques for RC Beam–Column Joints
3. Proposed Nonlinear Modeling Technique for RC Substandard Beam–Column Joints
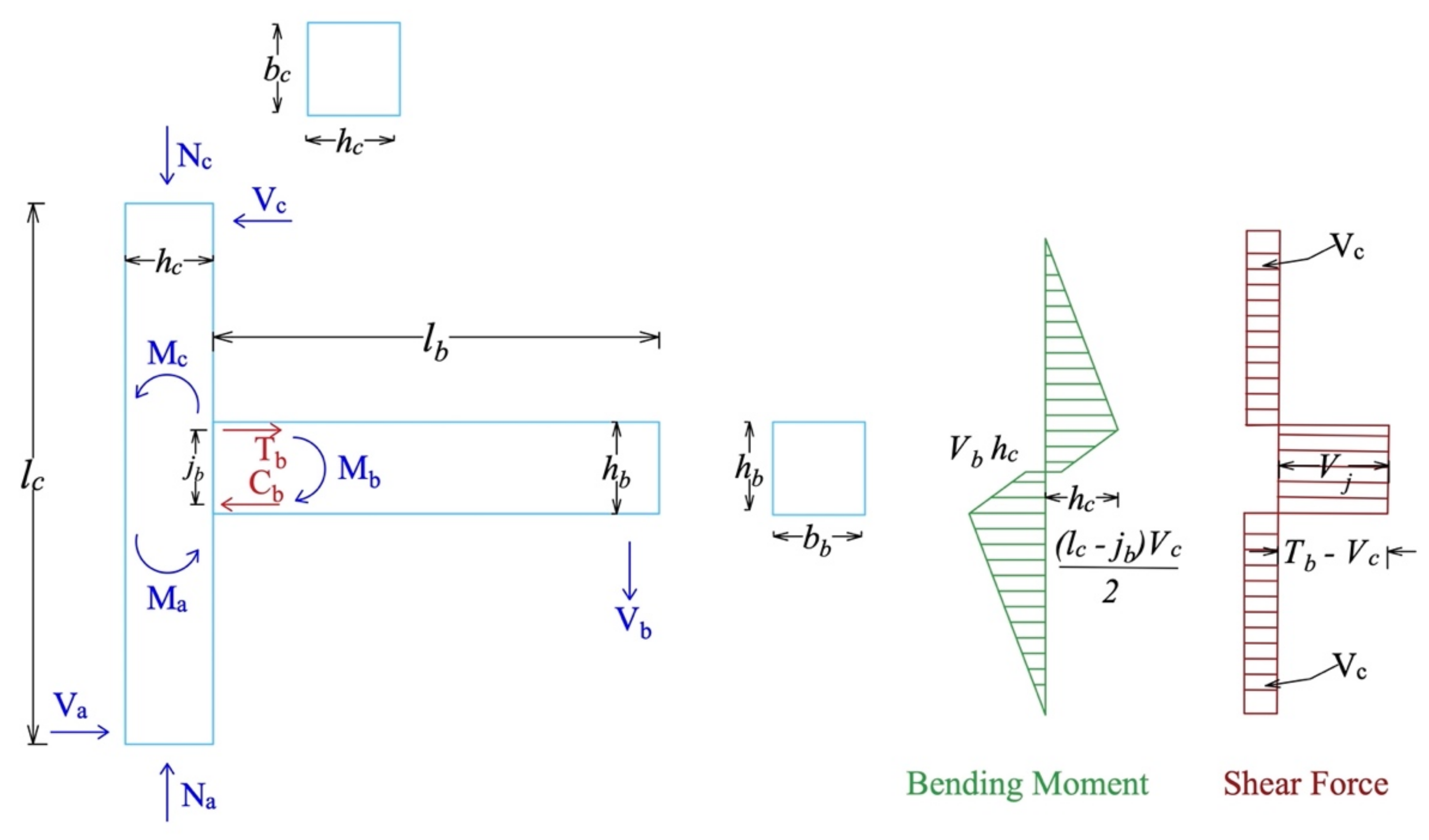
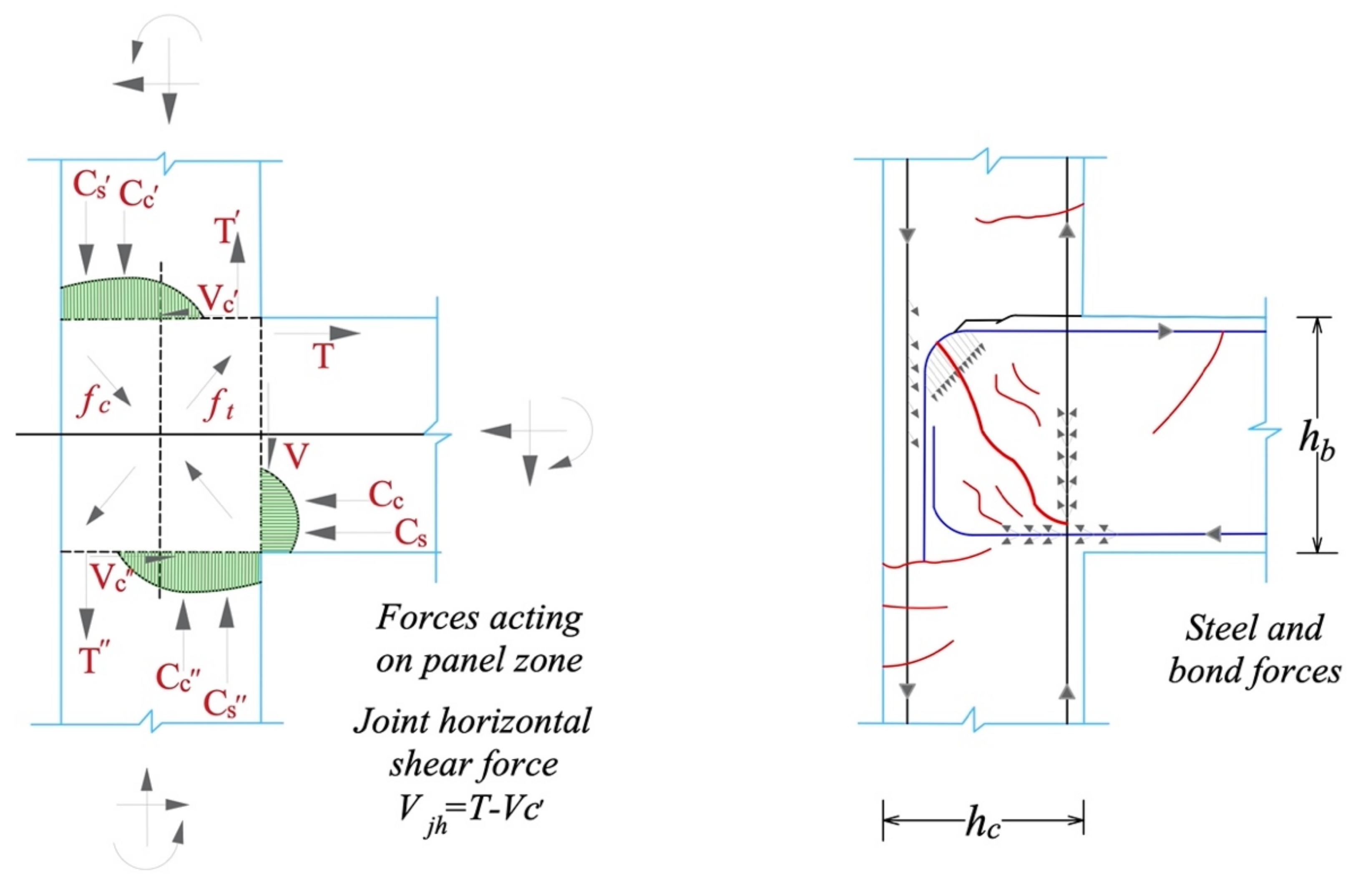
3.1. Mechanics of Exterior Beam–Column Joints
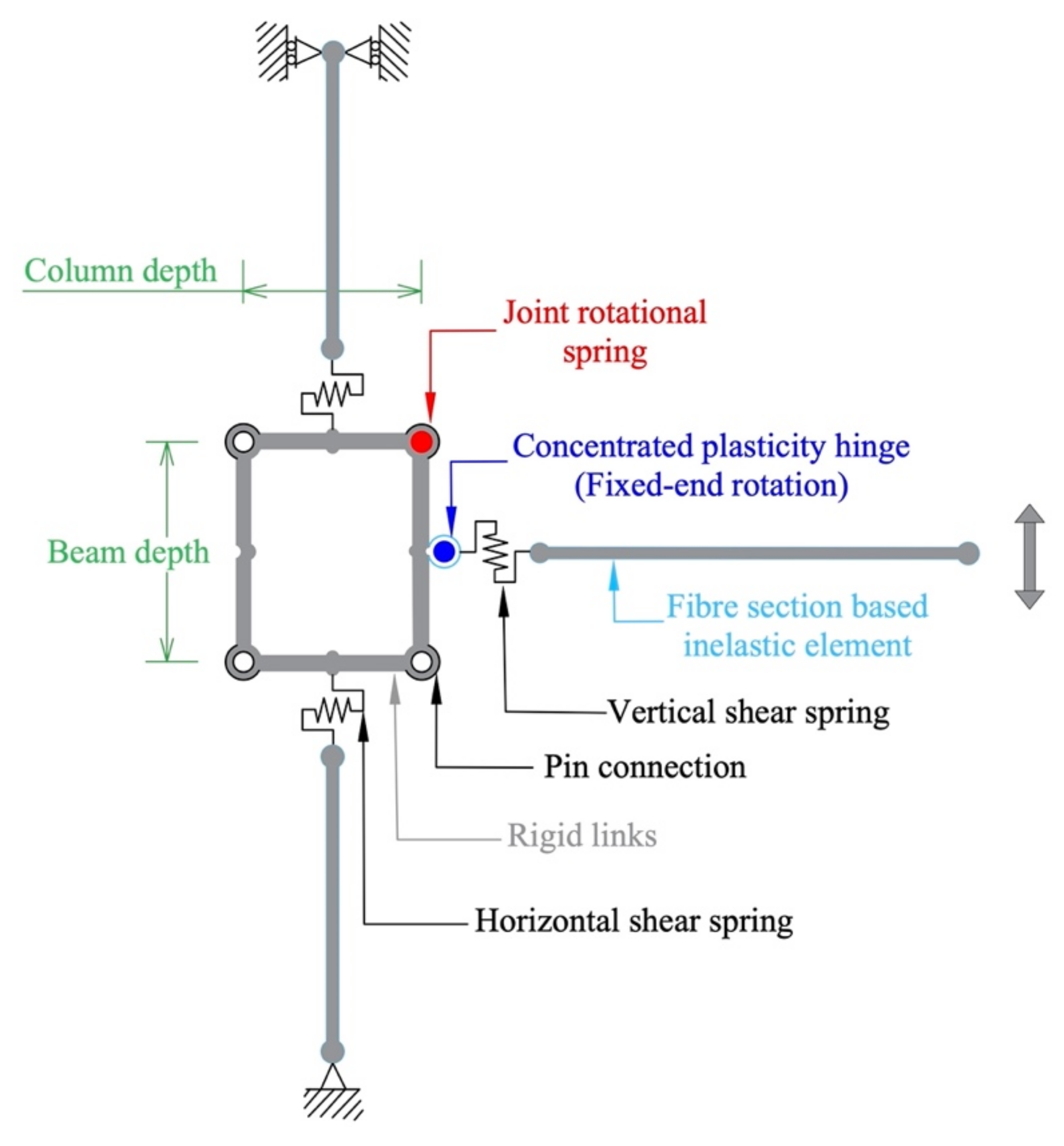
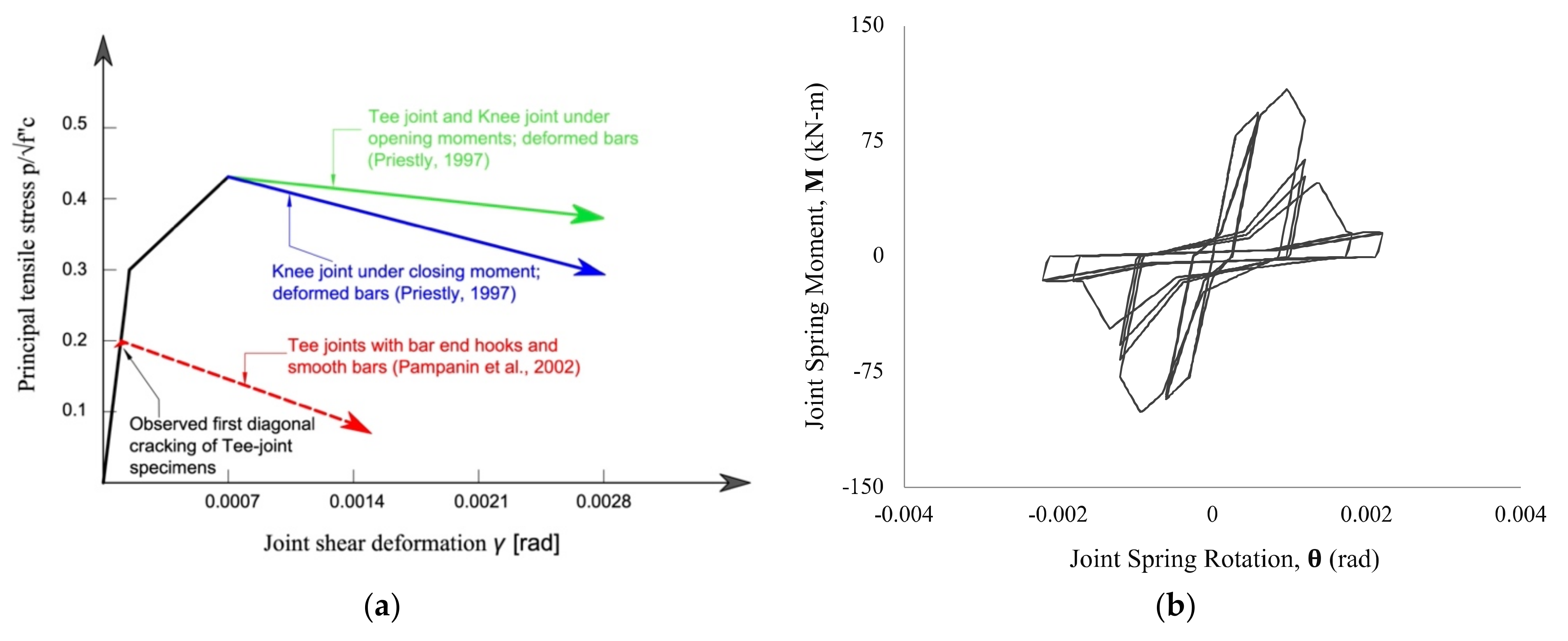
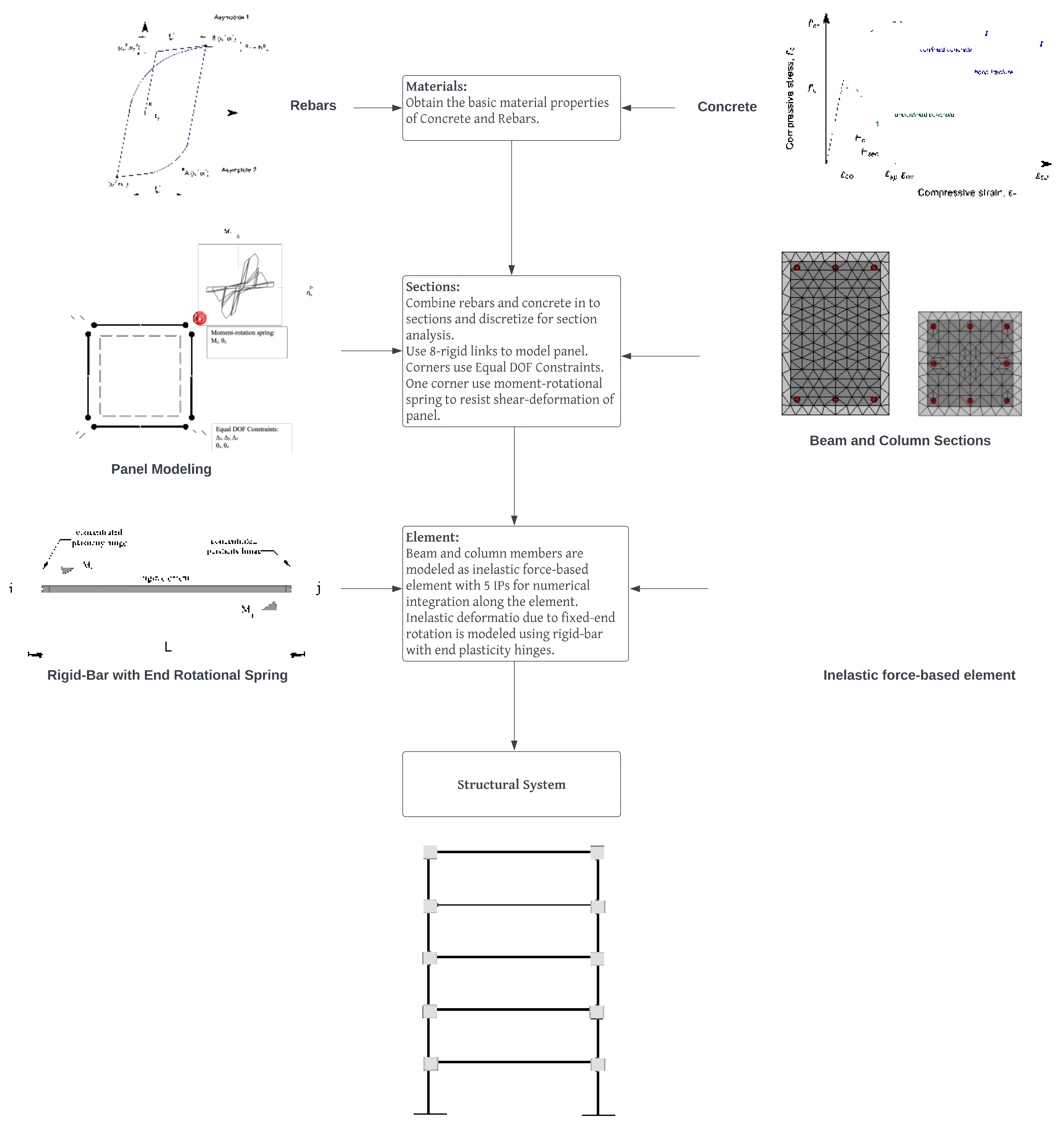
3.2. Modeling of Joint Shear Panel
3.3. Modeling of Beam–Column Connecting Members
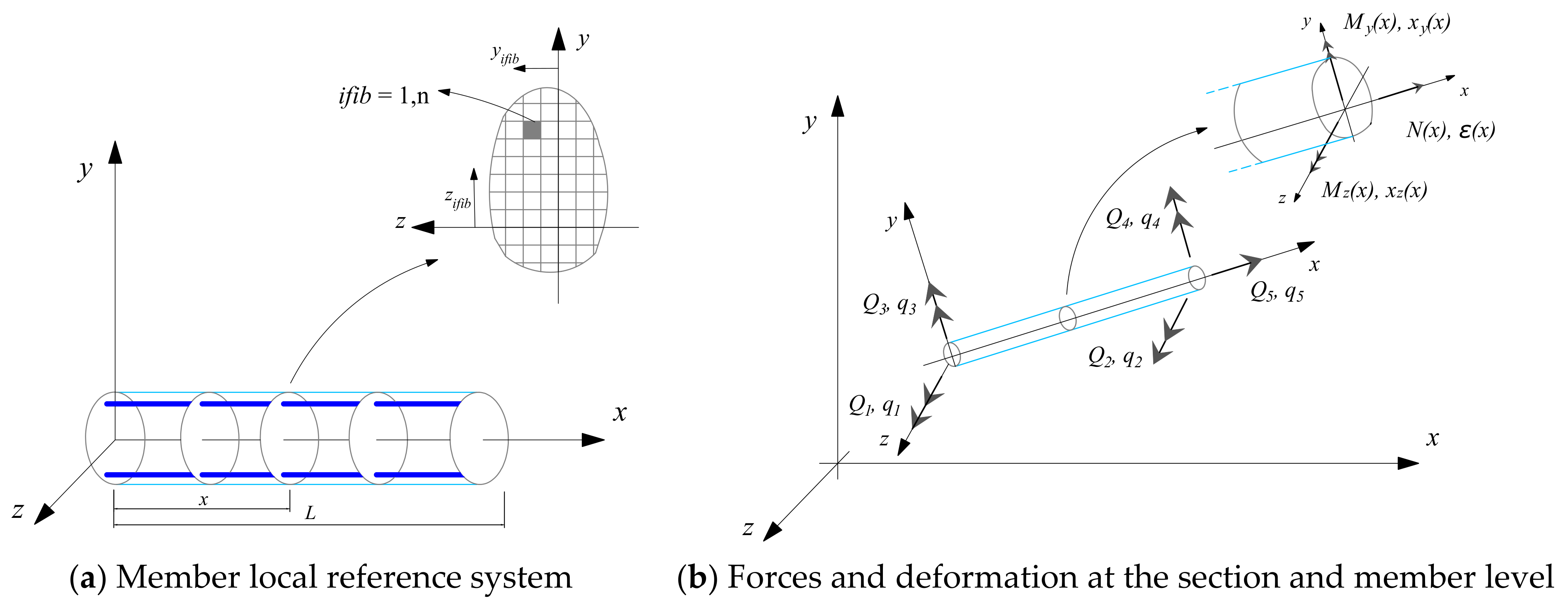
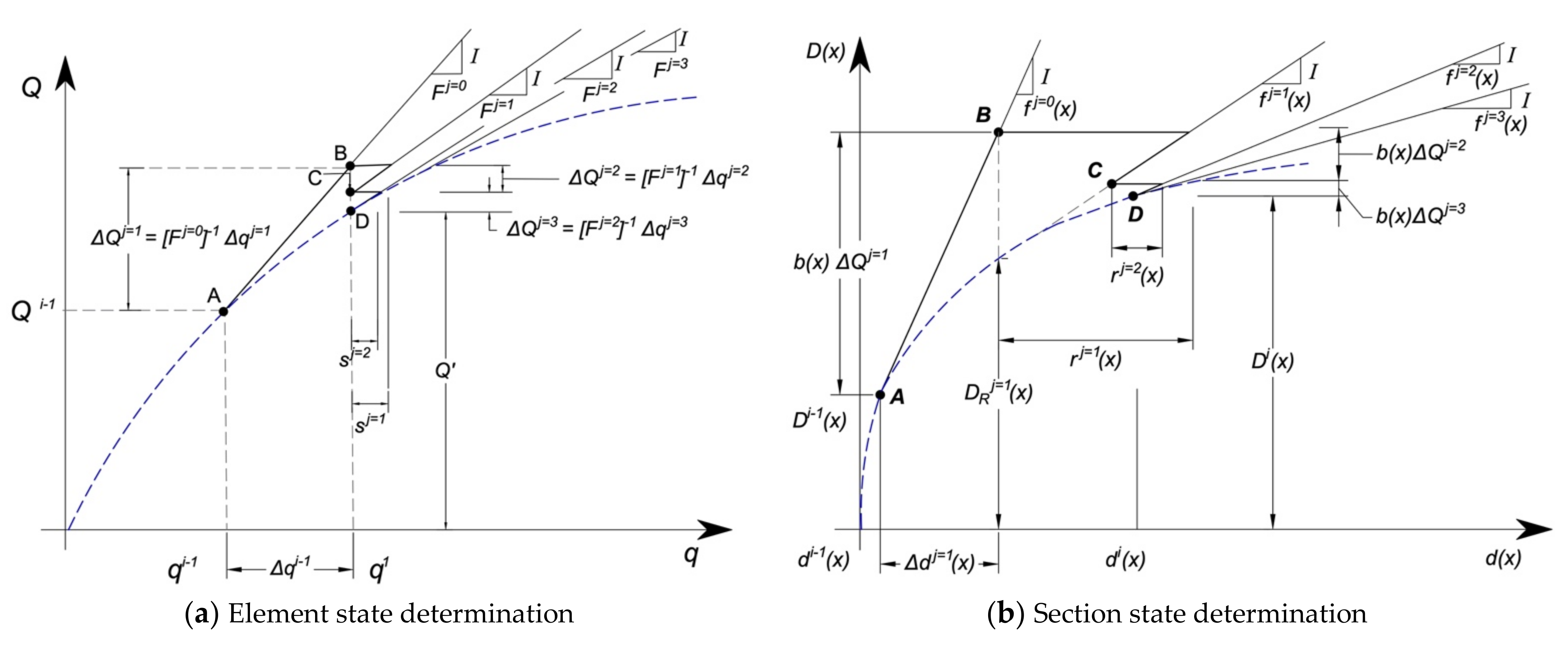
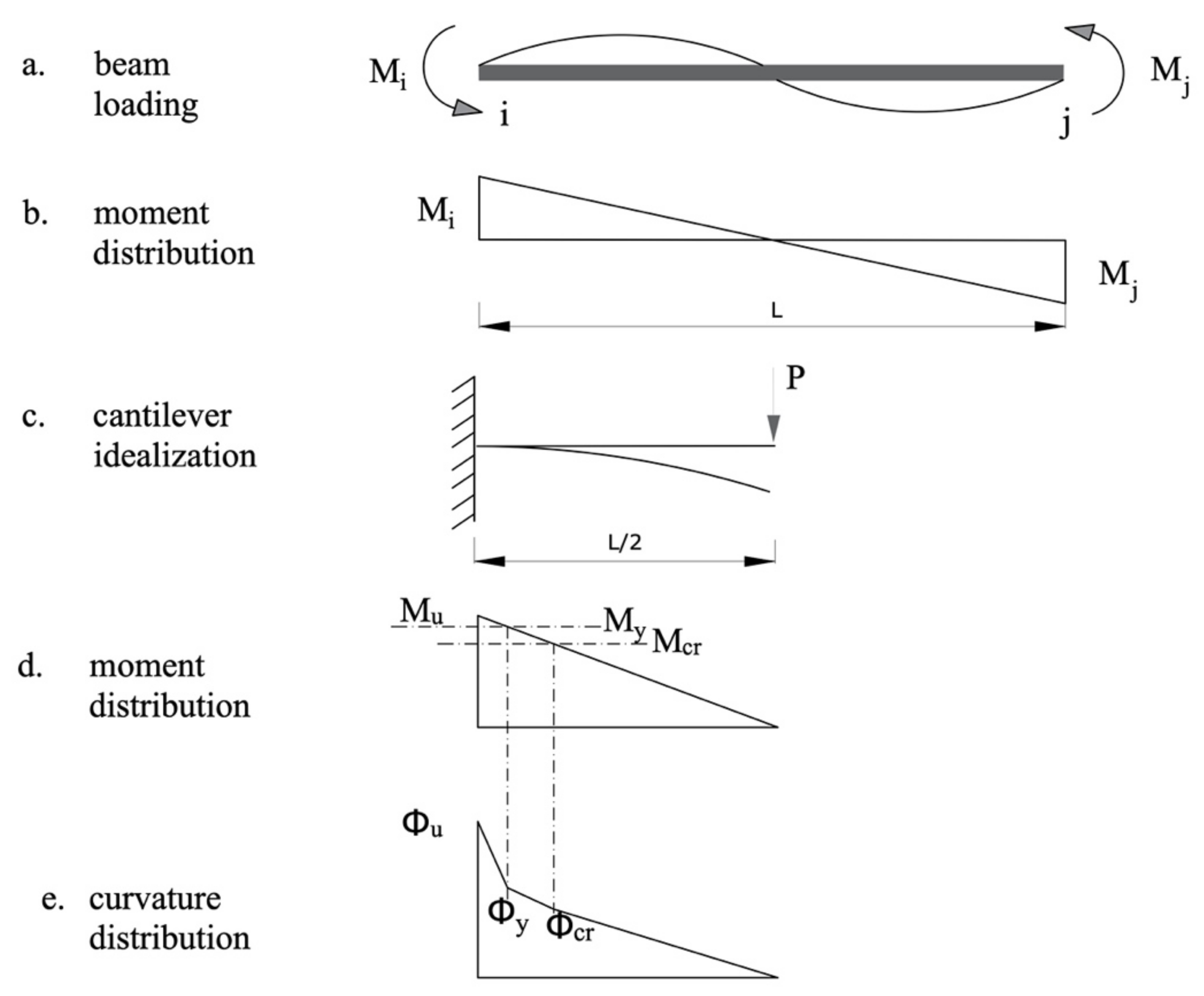
3.3.1. Beam–Column Element Formulation
- Beam–column element in local reference system x, y, z (Figure 7a)
- A discrete number of cross sections placed at control points of the numerical integration
- Beam–column member geometry is linear.
- Plane sections remain plane and are normal to the longitudinal axis throughout the deformation history.
- Strains and stresses act parallel to the longitudinal axis.
- Member behavior in torsion is linearly elastic and uncoupled from flexure and axial response.
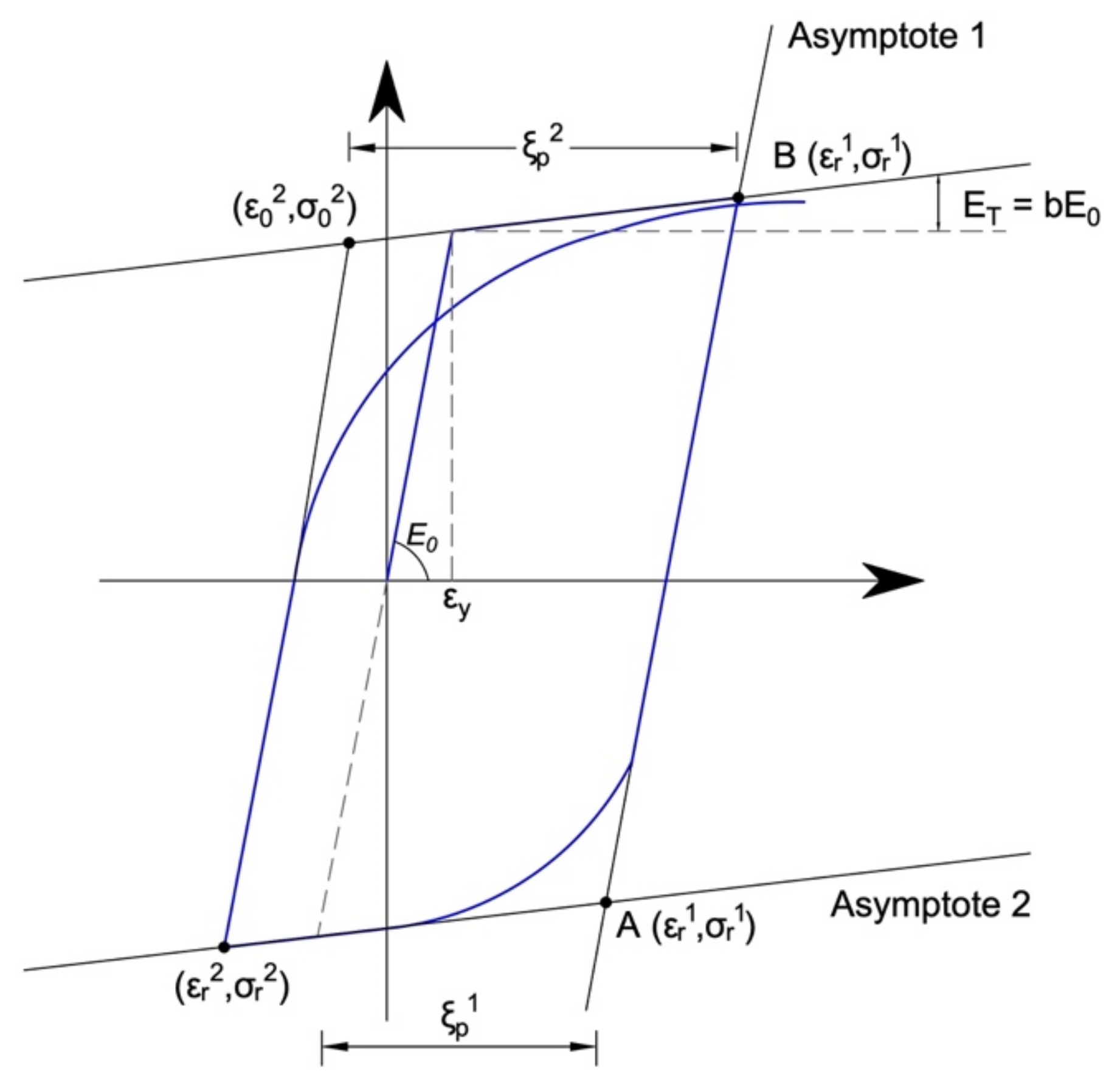
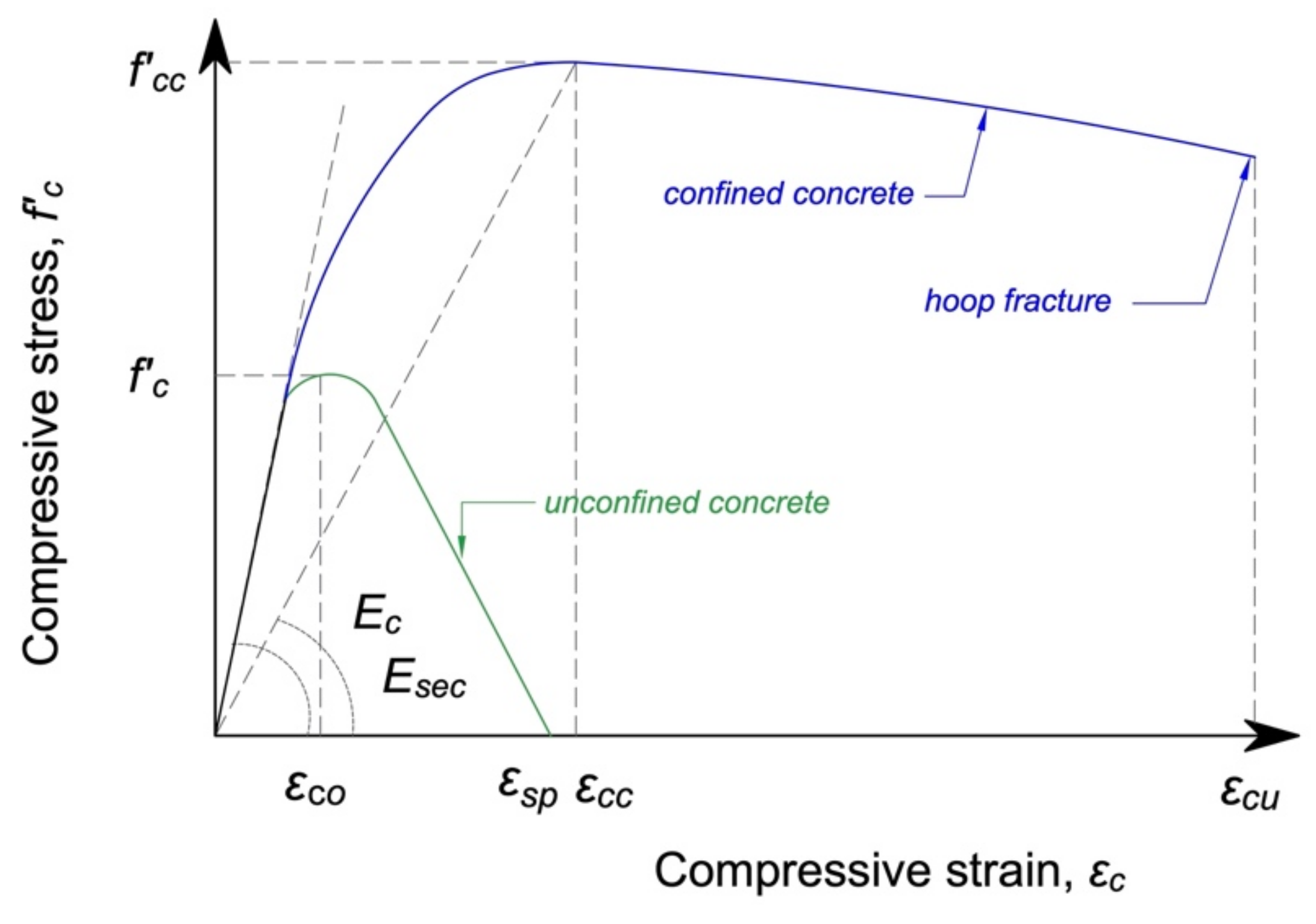
3.3.2. Material Models
3.3.3. Geometric Nonlinearity
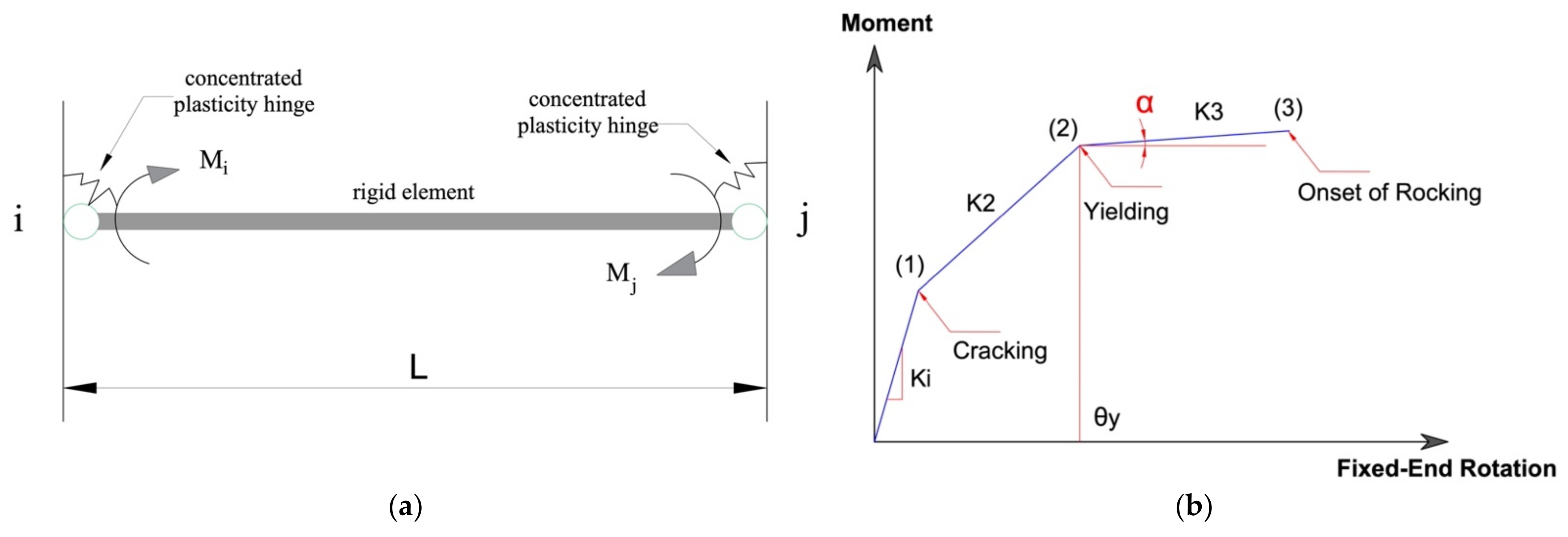
3.4. Modeling of Fixed-End Rotation
3.5. RC Beam–Column Frame Member Shear Strength
3.5.1. Basics of RC Member Shear Strength
3.5.2. Shear Strength Model Implementation
4. Validation of the Proposed Modeling Technique
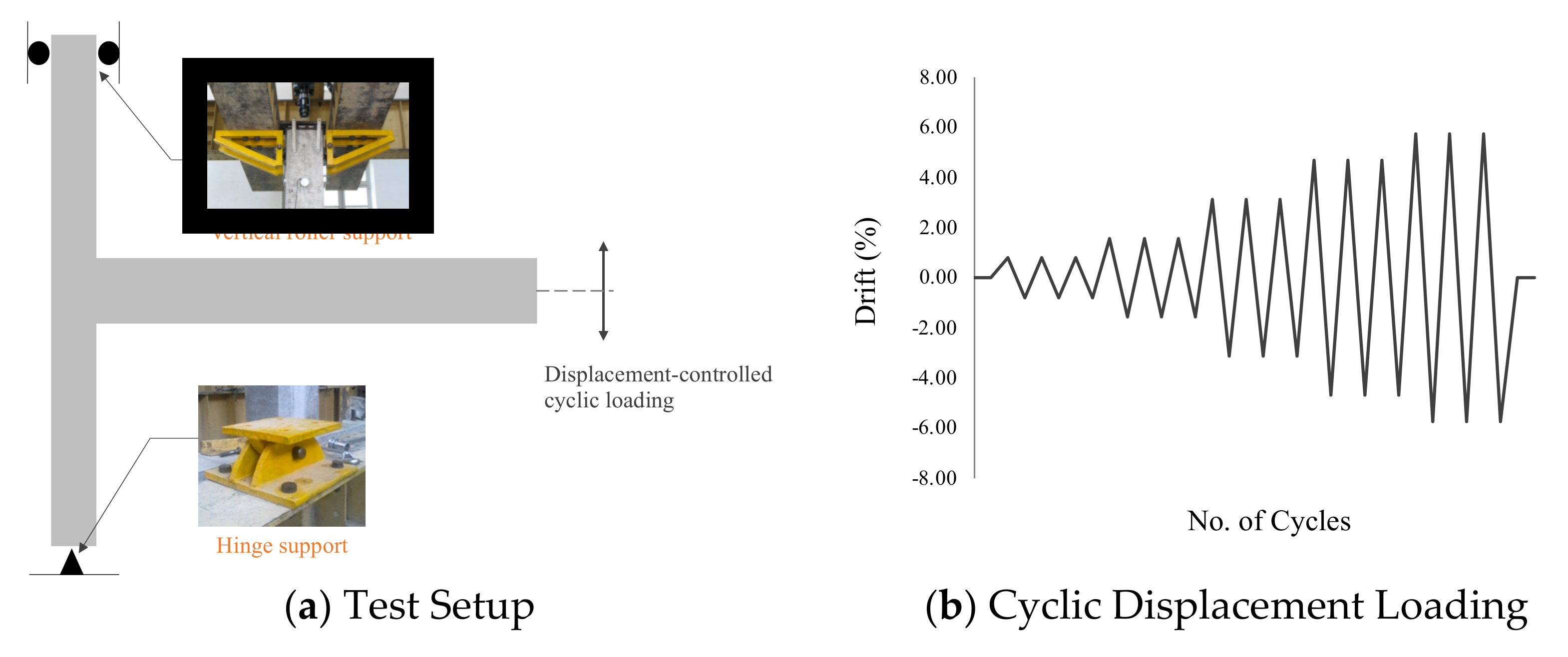
4.1. Quasi-Static Cyclic Testing of Tee Beam–Column Joint
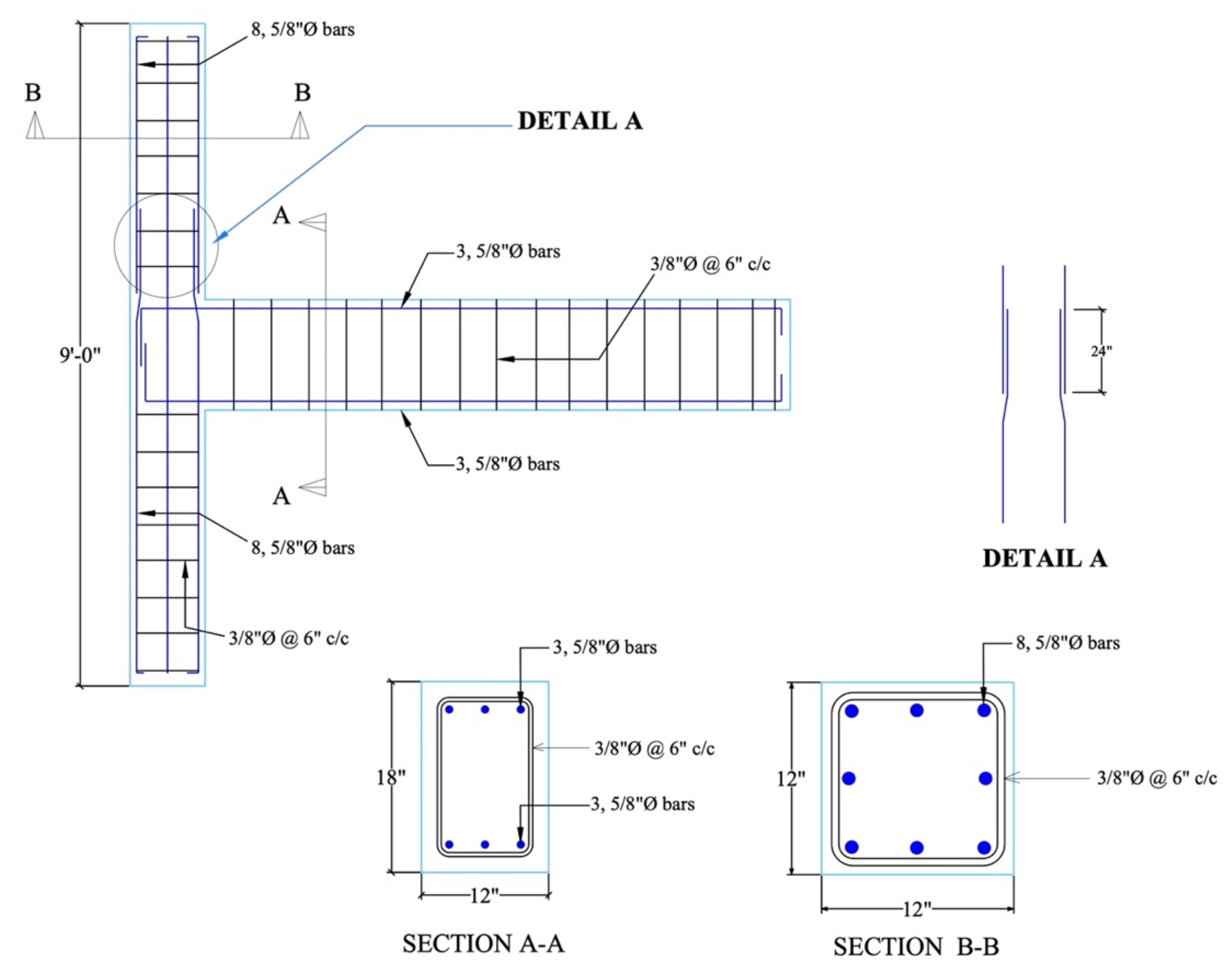
4.1.1. Description of Test Specimen
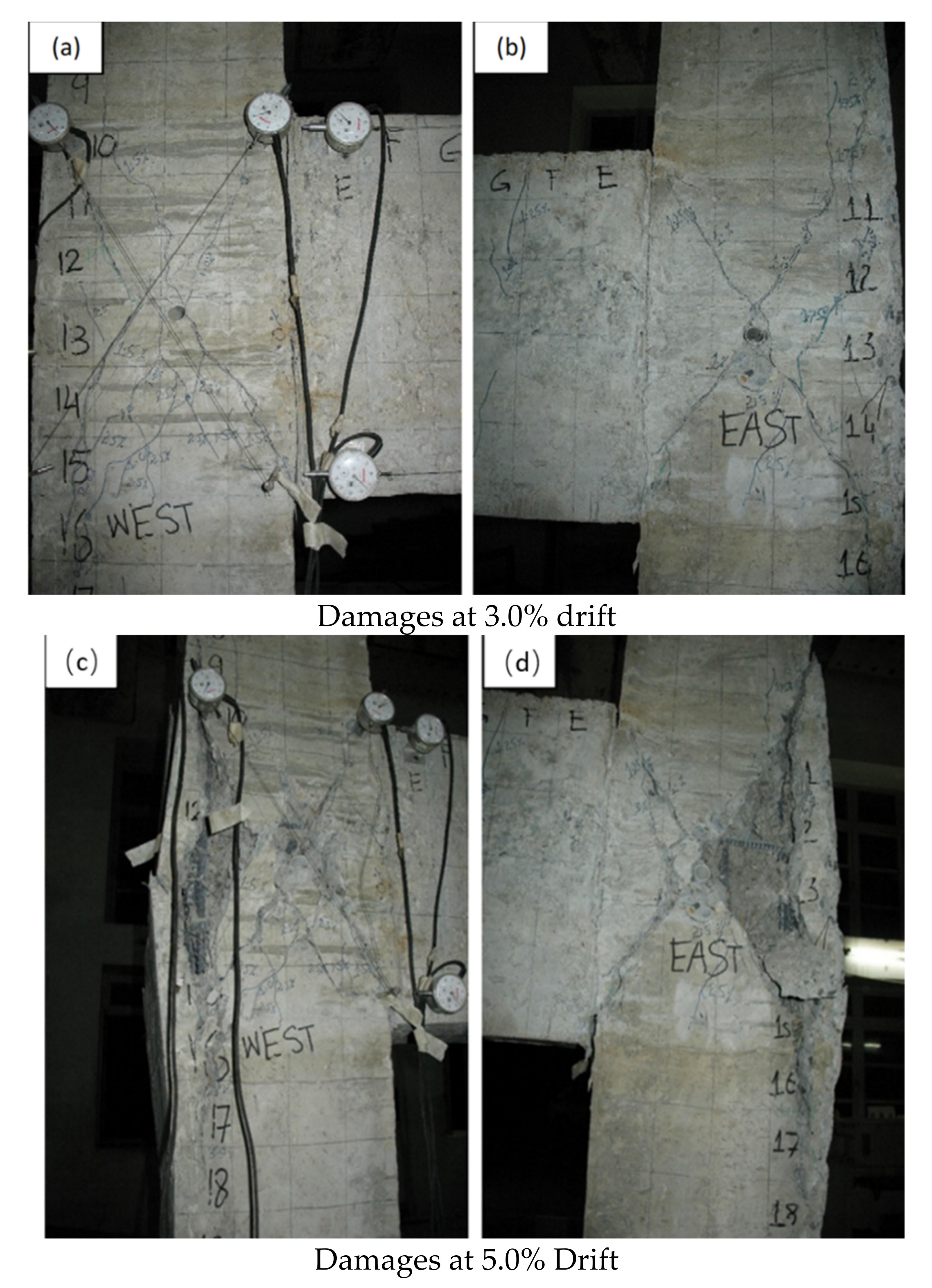
4.1.2. Experimental Program and Specimen Behavior
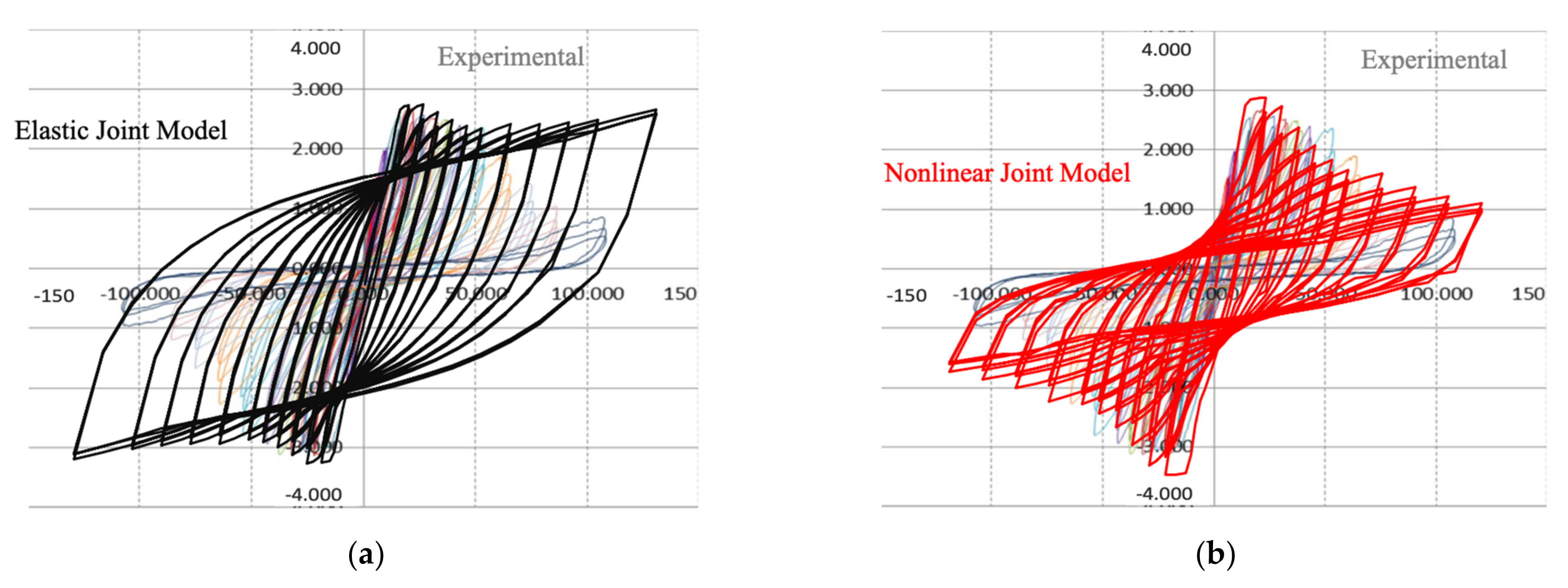
4.2. Comparison of the Numerical and Experimental Prediction
5. Frame Structure Nonlinear Response Analysis
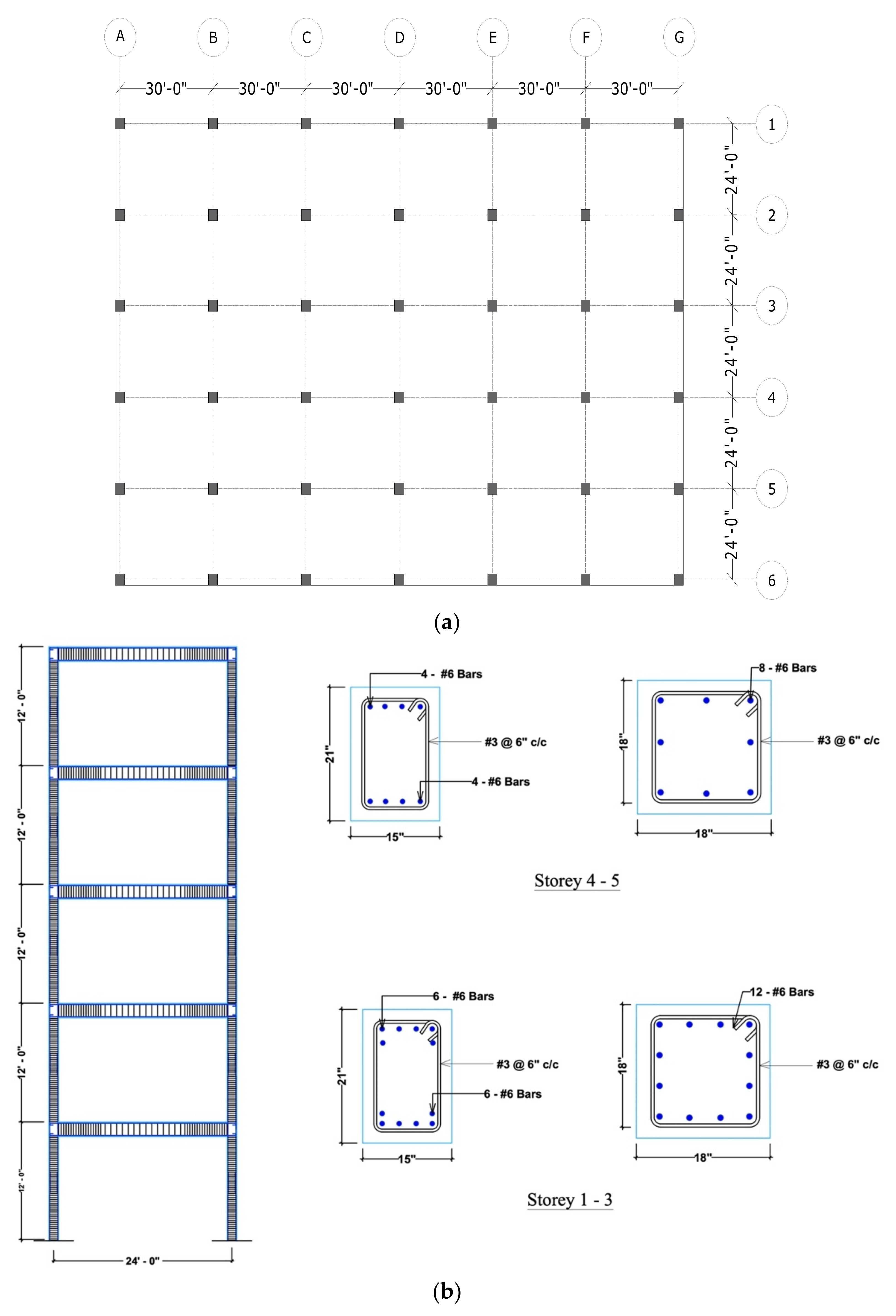
5.1. Description of Frame Structure
5.2. Numerical Modeling
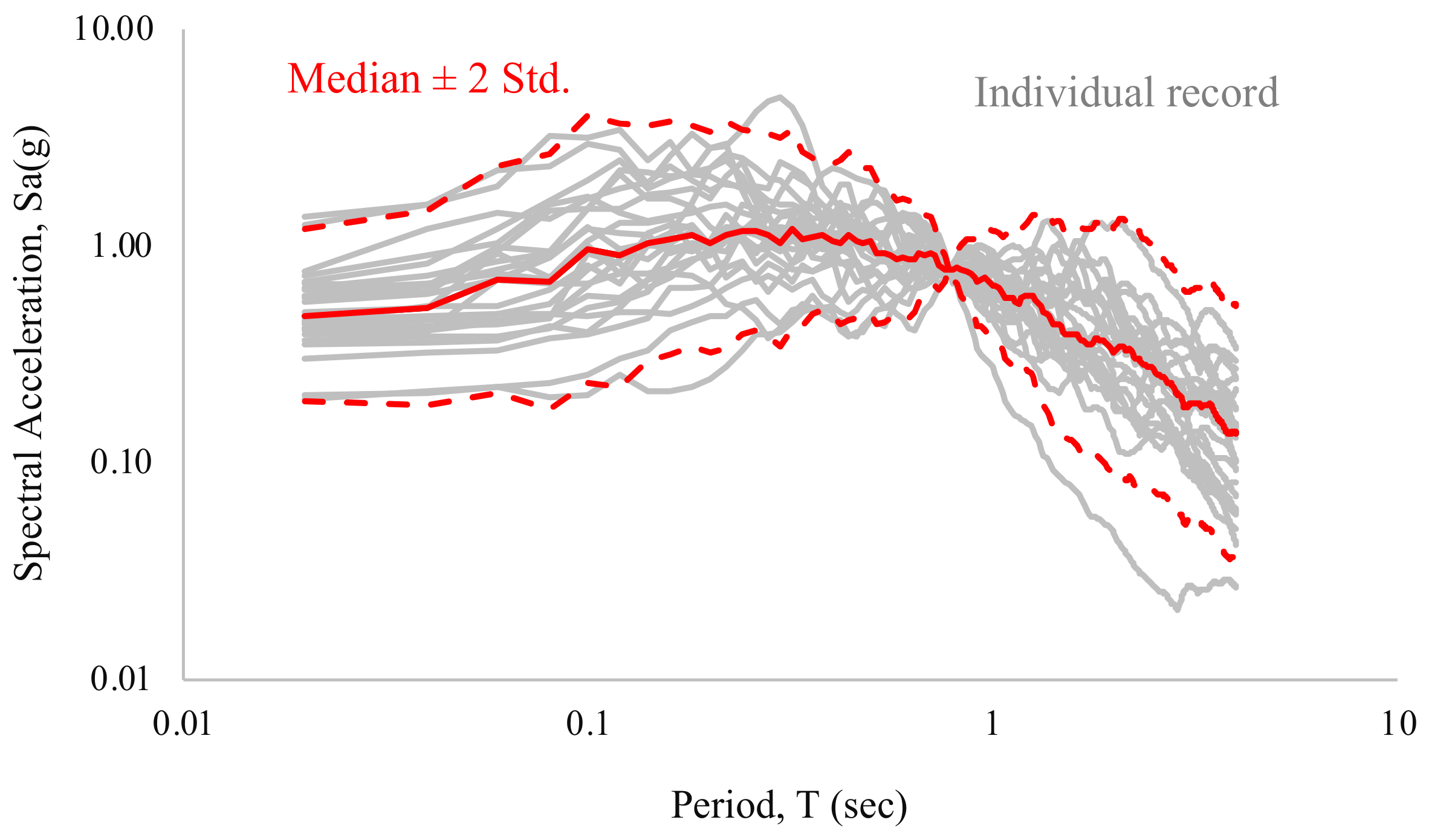
5.3. Selected Ground Motions
5.4. Frame Nonlinear Response
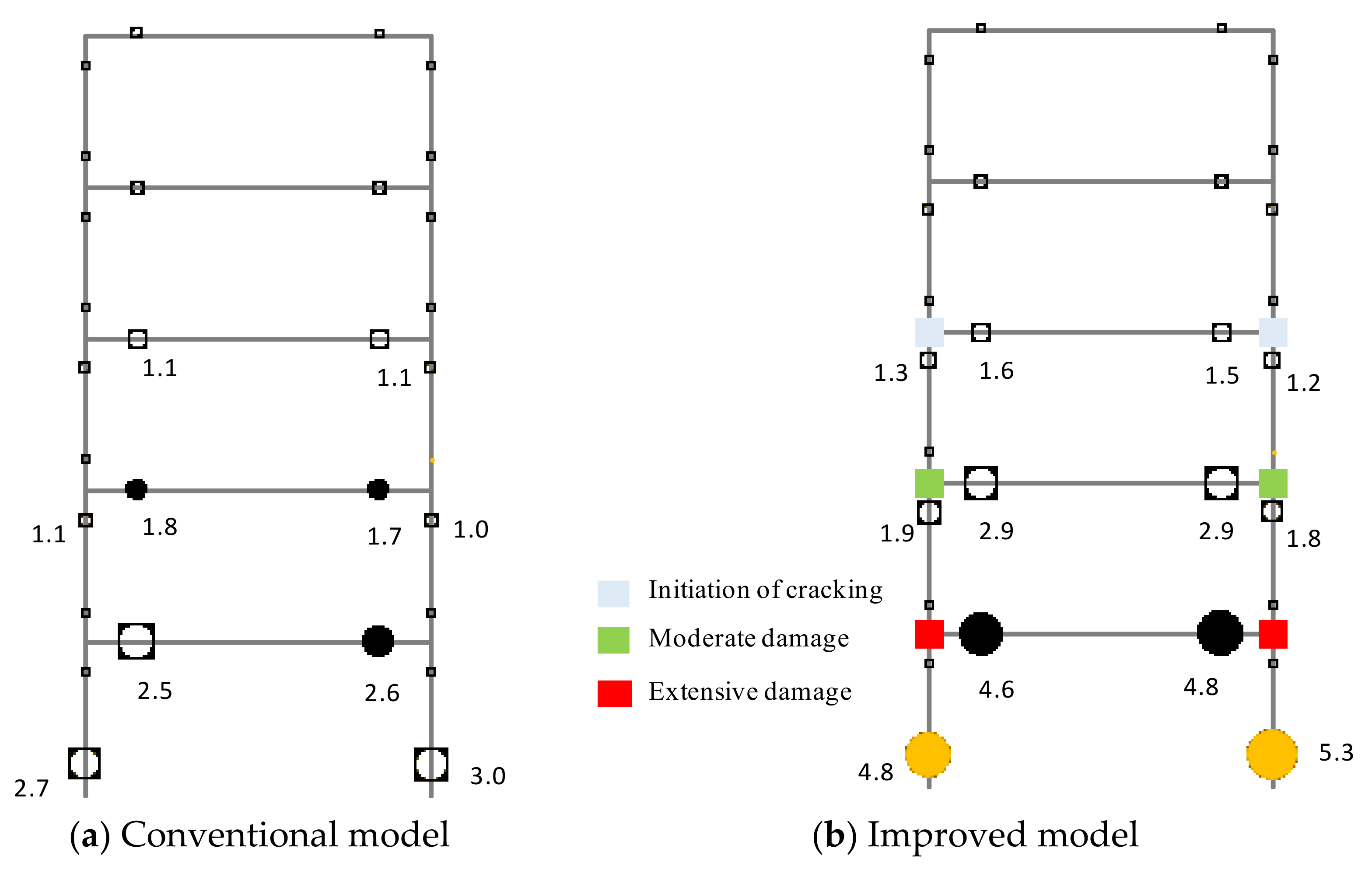
5.4.1. Damage Distribution
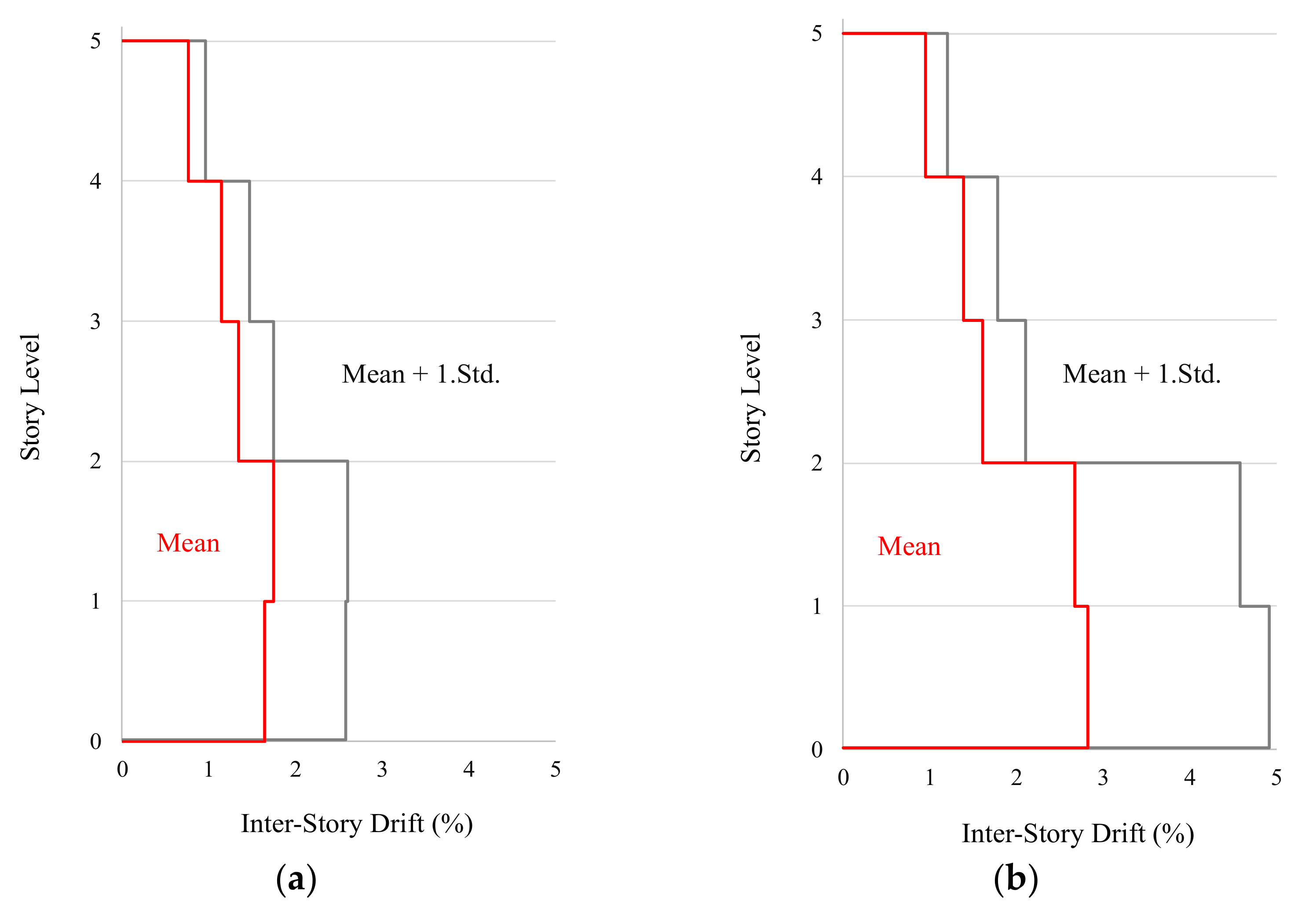
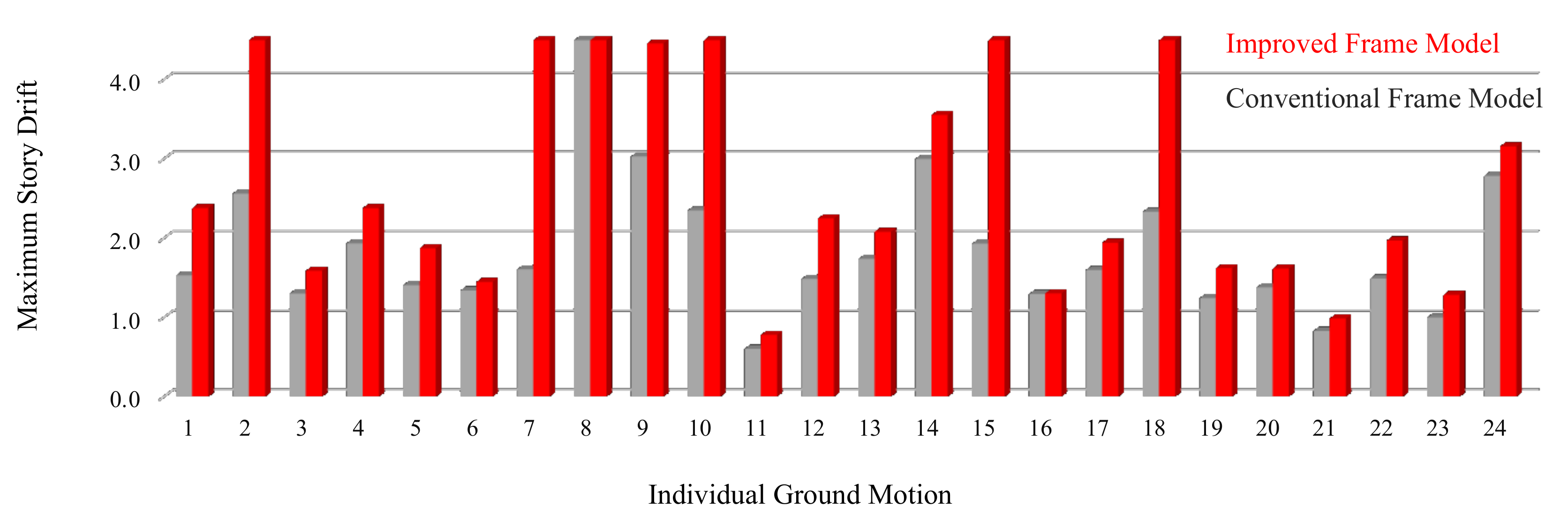
5.4.2. Inter-Story Drift Demand
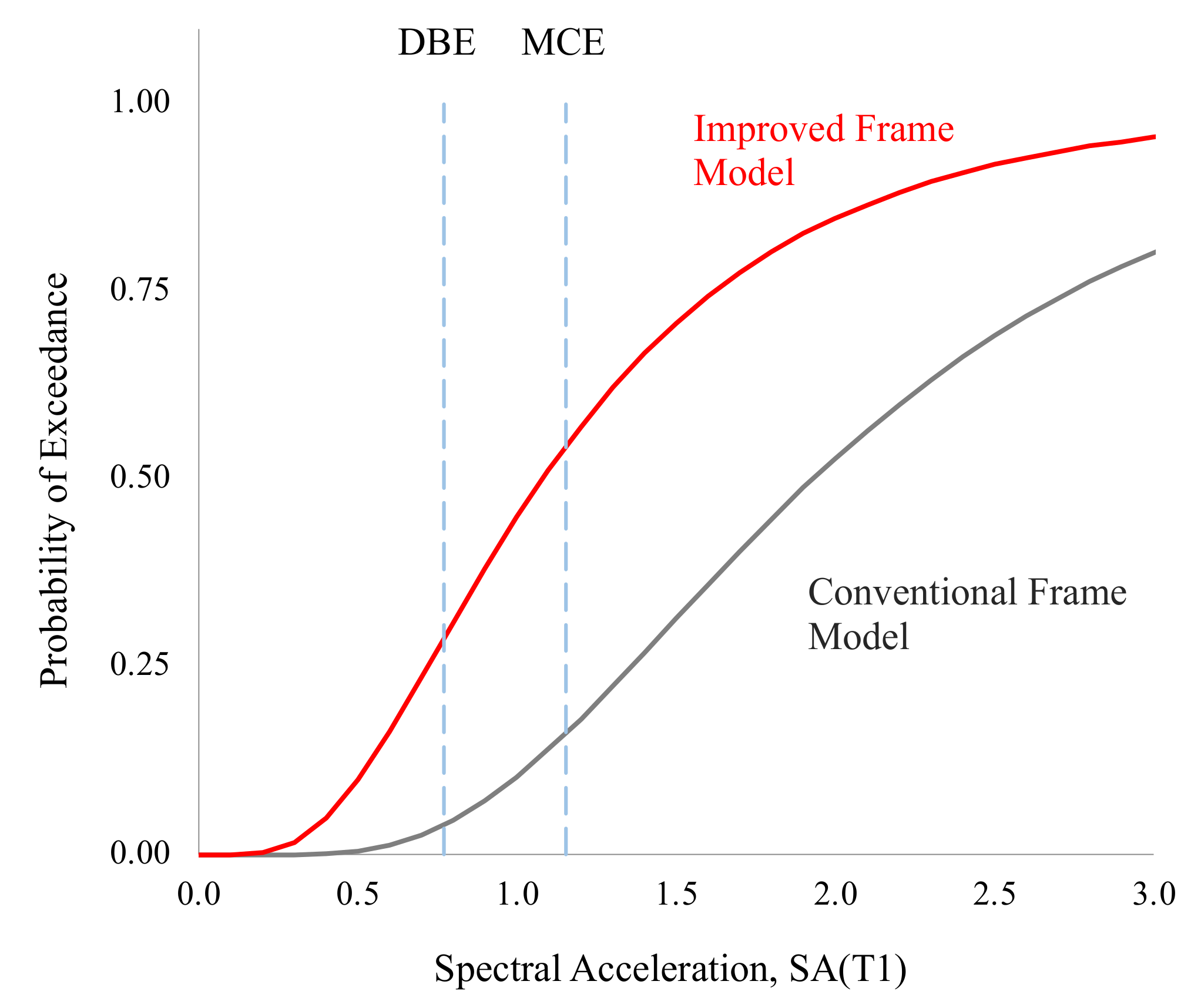
5.4.3. Collapse Risk
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No. | Earthquake Event | Year | Recording Station | Mw | Fault | Rjb (km) | Duration (s), 5–95% |
|---|---|---|---|---|---|---|---|
| 1 | San Fernando | 1971 | LA–Hollywood Stor FF | 6.61 | Rev. | 22.77 | 13.4 |
| 2 | Tabas_ Iran | 1978 | Boshrooyeh | 7.35 | Rev. | 24.07 | 19.5 |
| 3 | Coalinga-01 | 1983 | Parkfield–Fault Zone 15 | 6.36 | Rev. | 28.00 | 19.7 |
| 4 | Spitak_ Armenia | 1988 | Gukasian | 6.77 | Rev. Ob. | 23.99 | 10.5 |
| 5 | Loma Prieta | 1989 | Hollister–South & Pine | 6.93 | Rev. Ob | 27.67 | 28.8 |
| 6 | Northridge-01 | 1994 | LA–W 15th St | 6.69 | Rev. | 25.59 | 20.2 |
| 7 | Chi-Chi_ Taiwan | 1999 | CHY025 | 7.62 | Rev. Ob. | 19.07 | 35.3 |
| 8 | St Elias_ Alaska | 1979 | Icy Bay | 7.54 | Rev. | 26.46 | 34.6 |
| 9 | Niigata_ Japan | 2004 | NIG018 | 6.63 | Rev. | 21.55 | 70.3 |
| 10 | Chuetsu-oki_ Japan | 2007 | Joetsu Kita | 6.80 | Rev. | 28.97 | 30.8 |
| 11 | Iwate_ Japan | 2008 | IWT012 | 6.90 | Rev. | 20.47 | 30.8 |
| 12 | Christchurch_ New Zealand | 2011 | LINC | 6.20 | Rev. Ob. | 18.47 | 13.3 |
| 13 | Northern Calif-03 | 1954 | Ferndale City Hall | 6.50 | SS | 26.72 | 19.4 |
| 14 | Imperial Valley-06 | 1979 | Delta | 6.53 | SS | 22.03 | 51.4 |
| 15 | Victoria_ Mexico | 1980 | Chihuahua | 6.33 | SS | 18.53 | 19 |
| 16 | Morgan Hill | 1984 | Agnews State Hospital | 6.19 | SS | 24.48 | 40.9 |
| 17 | Superstition Hills-02 | 1987 | Brawley Airport | 6.54 | SS | 17.03 | 14.3 |
| 18 | Landers | 1992 | North Palm Springs | 7.28 | SS | 26.84 | 37.9 |
| 19 | Kobe_ Japan | 1995 | Fukushima | 6.90 | SS | 17.85 | 35.7 |
| 20 | Tottori_ Japan | 2000 | OKY005 | 6.61 | SS | 28.81 | 24 |
| 21 | Parkfield-02_ CA | 2004 | Coalinga–Fire Station 39 | 6.00 | SS | 22.45 | 27.7 |
| 22 | El Mayor-Cucapah_ Mexico | 2010 | Chihuahua | 7.20 | SS | 18.21 | 51.2 |
| 23 | Joshua Tree_ CA | 1992 | Thousand Palms Post Office | 6.10 | SS | 17.15 | 11.1 |
| 24 | Darfield_ New Zealand | 2010 | WSFC | 7.00 | SS | 24.36 | 26.2 |
References
- Moehle, J.P.; Mahin, S.A. Observations on the behavior of reinforced concrete buildings during earthquakes. ACI Spec. Publ. 1991, 127, 67–90. [Google Scholar]
- Varum, H. Seismic assessment, strengthening and repair of existing buildings. Ph.D. Thesis, Department of Civil Engineering, University of Aveiro, Aveiro, Portugal, 2003. [Google Scholar]
- EERI. Northridge Earthquake January 17; Preliminary Reconnaissance Report, Earthquake Engineering Research Institute (EERI): Oakland, CA, USA, 1994. [Google Scholar]
- Aycardi, L.E.; Mander, J.B.; Reinhorn, A.M. Seismic resistance of reinforced concrete frame structures designed only for gravity loads–experimental performance of subassemblages. ACI Struct. J. 1994, 91, 552–563. [Google Scholar]
- Beres, A.; Pessiki, S.P.; White, R.N.; Gergely, P. Implications of experiments on the seismic behaviour of gravity load designed RC beam-to-column connections. Earthq. Spectra 1996, 12, 185–198. [Google Scholar] [CrossRef]
- Gautam, D.; Adhikari, R.; Rupakhety, R. Seismic fragility of structural and non-structural elements of Nepali RC buildings. Eng. Struct. 2021, 232, 111879. [Google Scholar] [CrossRef]
- Ahmad, N.; Shahzad, A.; Rizwan, M.; Khan, A.N.; Ali, S.M.; Ashraf, M.; Naseer, A.; Ali, Q.; Alam, B. Seismic performance assessment of non-compliant SMRF reinforced concrete frame: Shake-table test study. J. Earthq. Eng. 2019, 23, 444–462. [Google Scholar] [CrossRef]
- Rizwan, M.; Ahmad, N.; Khan, A.N. Seismic performance of compliant and noncompliant special moment-resisting reinforced concrete frames. ACI Struct. J. 2018, 115, 1063–1073. [Google Scholar] [CrossRef]
- Ricci, P.; De Risi, M.T.; Verderame, G.M.; Manfredi, G. Experimental tests of unreinforced exterior beam-column joints with plain bars. Eng. Struct. 2016, 118, 178–194. [Google Scholar] [CrossRef]
- De Risi, M.T.; Verderame, G.M. Experimental assessment and numerical modelling of exterior non-conforming beam-column joints with plain bars. Eng. Struct. 2017, 150, 115–134. [Google Scholar] [CrossRef]
- Melo, J.; Varum, H.; Rossetto, T. Experimental assessment of the monotonic and cyclic behavior of exterior RC beam-column joints built with plain bars and non-seismically designed. Eng. Struct. 2022, 270, 114887. [Google Scholar] [CrossRef]
- ACI-352-R02. In Recommendations for the Design of Beam-Column Joints in Monolithic Reinforced Concrete Structures; American Concrete Institute (ACI): Farmington Hills, MI, USA, 2002.
- Badrashi, Y.I. Response modification factors for reinforced concrete buildings in Pakistan. Ph.D. Thesis, Department of Civil Engineering, UET Peshawar, Peshawar, Pakistan, 2016. [Google Scholar]
- El-Metwally, S.E.; Chen, W.F. Moment-rotation modeling of reinforced concrete beam-column connections. Struct. J. 1988, 85, 384–394. [Google Scholar]
- Alath, S.; Kunnath, S.K. Modeling inelastic shear deformations in RC beam-column joints. In Proceedings of 10th Engineering Mechanics Conference ASCE, Boulder, Colorado, USA, 30 April 1995; pp. 822–825. [Google Scholar]
- Biddah, A.; Ghobarah, A. Modelling of shear deformation and bond slip in reinforced concrete joints. Struct. Eng. Mech. 1999, 7, 413–432. [Google Scholar] [CrossRef]
- Lowes, L.N.; Altoontash, A. Modeling reinforced-concrete beam-column joints subjected to cyclic loading. J. Struct. Eng. ASCE 2003, 129, 1686–1697. [Google Scholar] [CrossRef]
- Youssef, M.; Ghobarah, A. Modelling of RC beam-column joints and structural walls. J. Earthq. Eng. 2001, 5, 93–111. [Google Scholar] [CrossRef]
- Shin, M.; LaFave, J.M. Testing and modelling for cyclic joint shear deformations in RC beam-column connections. In Proceedings of the 10th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1 August 2004; p. 301. [Google Scholar]
- Altoontash, A. Simulation and damage models for performance assessment of reinforced concrete beam-column joints. Ph.D. Thesis, Department of Civil and Environmental Engineering, Stanford University, Stanford, CA, USA, 2004. [Google Scholar]
- Ning, C.L.; Yu, B.; Li, B. Beam-column joint model for nonlinear analysis of non-seismically detailed reinforced concrete frame. J. Earthq. Eng. 2016, 20, 476–502. [Google Scholar] [CrossRef]
- Elmorsi, M.; Kianoush, M.R.; Tso, W.K. Modeling bond-slip deformations in reinforced concrete beam-column joints. Can. J. Civ. Eng. 2000, 27, 490–505. [Google Scholar] [CrossRef]
- Pampanin, S.; Magenes, G.; Carr, A. Modeling of shear hinge mechanism in poorly detailed RC beam-column joints. In Concrete Structures in Seismic Regions: Fib, Symposium; University of Canterbury, Civil Engineering: Athens, Greece, 2003; p. 171. [Google Scholar]
- Sharma, A.; Eligehausen, R.; Reddy, G.R. A new model to simulate joint shear behavior of poorly detailed beam-column connections in RC structures under seismic loads. Part I: Exterior joints. Eng. Struct. 2011, 33, 1034–1051. [Google Scholar] [CrossRef]
- Kunnath, S.K.; Hoffmann, G.; Reinhorn, A.M.; Mander, J.B. Gravity-load-designed reinforced concrete buildings–Part I: Seismic evaluation of existing construction and Part II: Evaluation of detailing enhancements. ACI Struct. J. 1995, 92, 343–478. [Google Scholar]
- Ghobarah, A.; Biddah, A. Dynamic analysis of reinforced concrete frames including joint shear deformation. Eng. Struct. 1999, 21, 971–987. [Google Scholar] [CrossRef]
- Priestley, M.J.N. Displacement-based seismic assessment of reinforced concrete buildings. J. Earthq. Eng. 1997, 1, 157–192. [Google Scholar] [CrossRef]
- Khan, M.S.; Basit, A.; Ahmad, N. A simplified model for inelastic seismic analysis of RC frame have shear hinge in beam-column joints. Structures 2021, 29, 771–784. [Google Scholar] [CrossRef]
- Fillippou, F.C.; Popov, E.P.; Bertero, V.V. Effects of Bond Deterioration on Hysteretic Behaviour of Reinforced Concrete Joints; Technical Report, Report No. UCB/EERC-83/19; EERC, University of California: Berkeley, CA, USA, 1983. [Google Scholar]
- Filippou, F.C.; Issa, A. Nonlinear Analysis of Reinforced Concrete Frames under Cyclic Load Reversals; Technical Report, Report No. UCB/EERC-88/12; EERC, University of California: Berkeley, CA, USA, 1988. [Google Scholar]
- Baber, T.T.; Noori, M.N. Random vibration of degrading pinching systems. J. Eng. Mech. ASCE 1985, 111, 1010–1026. [Google Scholar] [CrossRef]
- Vecchio, F.J.; Collins, M.P. The modified-compression field theory for reinforced concrete elements subjected to shear. ACI J. 1986, 83, 219–231. [Google Scholar]
- Lowes, L.N.; Mitra, N.; Altoontash, A.A. A Beam-Column Joint Model for Simulating the Earthquake Response of Reinforced Concrete Frames; Technical Report, Report no. PEER 2003/10; Pacific Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 2004. [Google Scholar]
- Park, R. A summary of results of simulated seismic load tests on reinforced concrete beam-column joints, beams and columns with substandard reinforcing details. J. Earthq. Eng. 2002, 6, 147–174. [Google Scholar] [CrossRef]
- Paulay, T.; Priestley, M.J.N. Seismic Design of Reinforced Concrete and Masonry Buildings; John Wiley & Sons Inc.: New York, NY, USA, 1992. [Google Scholar]
- Calvi, G.M.; Magenes, G.; Pampanin, S. Relevance of beam-column joint damage and collapse in RC frame assessment. J. Earthq. Eng. 2002, 6, 75–100. [Google Scholar] [CrossRef]
- Ibarra, L.F.; Medina, R.A.; Krawinkler, H. Hysteretic models that incorporate strength and stiffness deterioration. Earthq. Eng. Struct. Dyn. 2005, 34, 1489–1511. [Google Scholar] [CrossRef]
- Metelli, G.; Messali, F.; Beschi, C.; Riva, P. A model for beam–column corner joints of existing RC frame subjected to cyclic loading. Eng. Struct. 2015, 89, 79–92. [Google Scholar] [CrossRef]
- Hwang, S.J.; Lee, H.J. Analytical model for predicting shear strengths of exterior reinforced concrete beam-column joints for seismic resistance. ACI Struct. J. 1999, 96, 846–858. [Google Scholar]
- Spacone, E.; Filippou, F.C.; Taucer, F. Fibre beam-column model for non-linear analysis of R/C frames. Earthq. Eng. Struct. Dyn. 1996, 25, 711–725. [Google Scholar] [CrossRef]
- Ciampi, V.; Carlesimo, L. A nonlinear beam element for seismic analysis of structures. In Proceedings of the 8th European Conference on Earthquake Engineering, Lisbon, Portugal; 1986. [Google Scholar]
- Spacone, E.; Ciampi, V.; Filippou, F.C. Mixed formulation of nonlinear beam finite element. Comput. Struct. 1996, 58, 71–83. [Google Scholar] [CrossRef]
- Papadrakakis, M.; Charmpis, D.C.; Lagaros, N.D.; Tsompanakis, Y. Computational Structural Dynamics and Earthquake Engineering: Structures and Infrastructures; CRC Press/Balkema: Leiden, The Netherlands, 2008; Volume 2. [Google Scholar]
- Calabrese, A.; Almeida, J.P.; Pinho, R. Numerical issues in distributed inelasticity modelling of RC frame elements for seismic analysis. J. Earthq. Eng. 2010, 14 (Suppl. S1), 38–68. [Google Scholar] [CrossRef]
- Taucer, F.F.; Spacone, E.; Filippou, F.C. A Fiber Beam-Column Element for Seismic Response Analysis of Reinforced Concrete Structures; EERC Report 91/17; Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 1991. [Google Scholar]
- Menegotto, M.; Pinto, P.E. IABSE Symposium on Resistance and Ultimate Deformability of Structures; Symposium, International Association for Bridge and Structural Engineering: Zurich, Switzerland, 1973; pp. 15–22. [Google Scholar]
- Fragiadakis, M.; Pinho, R.; Antoniou, S. Modeling inelastic buckling of reinforcing bars under earthquake loading. In Proceedings of the ECCOMAS Thematic Conference on Computational Methods, Crete, Greece, 13–16 June 2007. [Google Scholar]
- Mander, J.B.; Priestley, M.J.N.; Park, R. Theoretical stress-strain model for confined concrete. J. Struct. Eng. ASCE 1988, 114, 1804–1826. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Rueda, J.E.; Elnashai, A.S. Confined concrete model under cyclic load. Mater. Struct. 1997, 30, 139–147. [Google Scholar] [CrossRef]
- Ahmad, N.; Masoudi, M.; Salawdeh, S. Cyclic response and modelling of special moment resisting beams exhibiting fixed-end rotation. Bulletin of Earthquake Engineering. 2021, 19, 203–240. [Google Scholar] [CrossRef]
- Deierlein, G.G.; Reinhorn, A.M.; Willford, M.R. Nonlinear Structural Analysis for Seismic Design, NIST GCR 10-917-5; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2010. [Google Scholar]
- Correia, A.A.; Virtuoso, F.B.E. Nonlinear analysis of space frames. III European Conference on Computational Mechanics; Springer: Dordrecht, Netherlands, 2006. [Google Scholar]
- ASCE 41-17. In Seismic Evaluation and Retrofit of Existing Buildings; Technical Report 2017; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2017.
- Monti, G.; Nuti, C.; Santini, S. CYRUS-Cyclic Response of Upgraded Sections; Report No. 96-2; University of Chieti: Chieti, Italy, 1996. [Google Scholar]
- Monti, G.; Nuti, C. Nonlinear cyclic behavior of reinforcing bars including buckling. J. Struct. Eng. 1992, 118, 3268–3284. [Google Scholar] [CrossRef]
- Madas, P. Advanced Modelling of Composite Frames Subjected to Earthquake Loading. Ph.D. Thesis, Imperial College London, London, UK, 1993. [Google Scholar]
- Sivaselvan, M.; Reinhorn, A.M. Hysteretic Models for Cyclic Behavior of Deteriorating Inelastic Structures; Report MCEER-99-0018; MCEER, SUNY at Buffalo: New York, NY, USA, 1999. [Google Scholar]
- Masoudi, M.; Khajevand, S. Revisiting flexural overstrength in RC beam-and-slab floor systems for seismic design and evaluation. Bull. Earthq. Eng. 2020, 18, 5309–5534. [Google Scholar] [CrossRef]
- Santarsiero, G.; Masi, A. Analysis of slab action on the seismic behavior of external RC beam-column joints. J. Build. Eng. 2020, 32, 101608. [Google Scholar] [CrossRef]
- Montuori, R.; Nastri, E.; Piluso, V. Modelling of floor joists contribution to the lateral stiffness of RC buildings designed for gravity loads. Eng. Struct. 2016, 121, 85–96. [Google Scholar] [CrossRef]
- Ahmad, N.; Rizwan, M.; Ashraf, M.; Khan, A.N.; Ali, Q. Seismic collapse safety of reinforced concrete moment resisting frames with/without beam-column joint detailing. Bull. New Zealand Soc. Earthq. Eng. 2020, 54, 1–20. [Google Scholar] [CrossRef]
- Baker, J.W. Efficient analytical fragility function fitting using dynamic structural analysis. Earthq. Spectra 2015, 31, 579–599. [Google Scholar] [CrossRef]






















| Parameter | θcr (rad) | Mcr/Mmax * | θy (rad) | My/Mmax * | α = K3/K1 |
|---|---|---|---|---|---|
| Value | 0.00091 | 0.27 | 0.01177 | 0.76 | 0.055 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, N.; Rizwan, M.; Ilyas, B.; Hussain, S.; Khan, M.U.; Shakeel, H.; Ahmad, M.E. Nonlinear Modeling of RC Substandard Beam–Column Joints for Building Response Analysis in Support of Seismic Risk Assessment and Loss Estimation. Buildings 2022, 12, 1758. https://doi.org/10.3390/buildings12101758
Ahmad N, Rizwan M, Ilyas B, Hussain S, Khan MU, Shakeel H, Ahmad ME. Nonlinear Modeling of RC Substandard Beam–Column Joints for Building Response Analysis in Support of Seismic Risk Assessment and Loss Estimation. Buildings. 2022; 12(10):1758. https://doi.org/10.3390/buildings12101758
Chicago/Turabian StyleAhmad, Naveed, Muhammad Rizwan, Babar Ilyas, Sida Hussain, Muhammad Usman Khan, Hamna Shakeel, and Muhammad Ejaz Ahmad. 2022. "Nonlinear Modeling of RC Substandard Beam–Column Joints for Building Response Analysis in Support of Seismic Risk Assessment and Loss Estimation" Buildings 12, no. 10: 1758. https://doi.org/10.3390/buildings12101758