6.1. Global Description of the Analyses
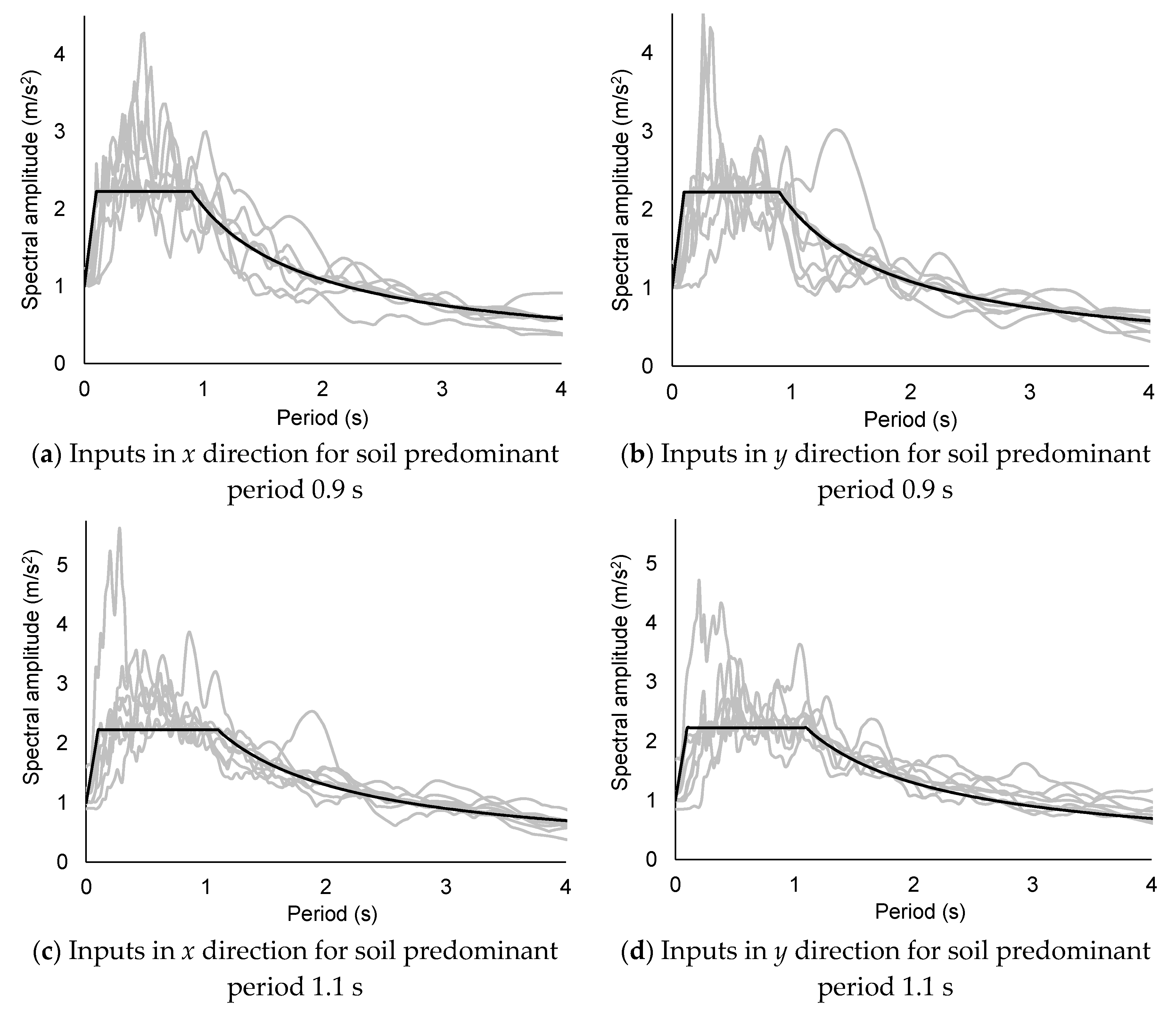
This section discusses the results of the time-history analyses for the inputs described in
Section 5; the
x/y input components are applied in
x/y directions (
Figure 2), respectively. As discussed in [
42], the most meaningful results in the superstructure are the drift angle, shear force and absolute acceleration; in the isolators, the axial forces, shear strain and torsion angle are also significant.
The dynamic analyses are performed by implementing the numerical model described in
Section 3 in SAP2000 v16.0 software package [
18]. The building (superstructure) behavior is linear, the non-linearities are concentrated in the isolation layer. The analyses consider the simultaneous actuation of both horizontal input components. The time integration is performed using non-linear modal analysis; the time step is Δ
t = 0.02 s. The second-order effects have not been considered; it is observed that such effects do not over-magnify the relative displacements in the isolators, although can increase the moments significantly, sometimes more than 10%. It should be kept in mind that any numerical model is always affected by epistemic (and random) uncertainties as discussed in [
43,
44].
6.2. General Overview of the Results
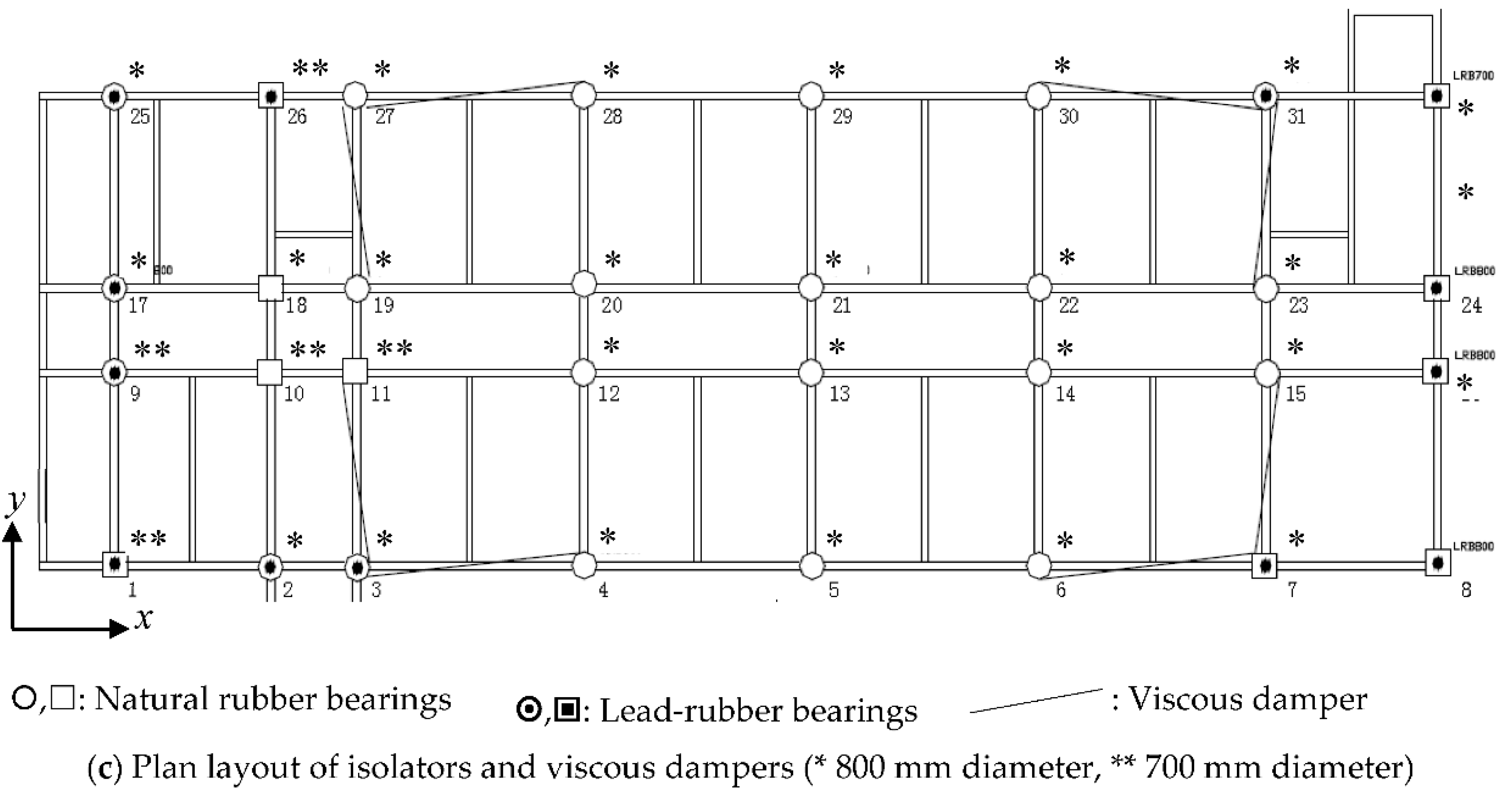
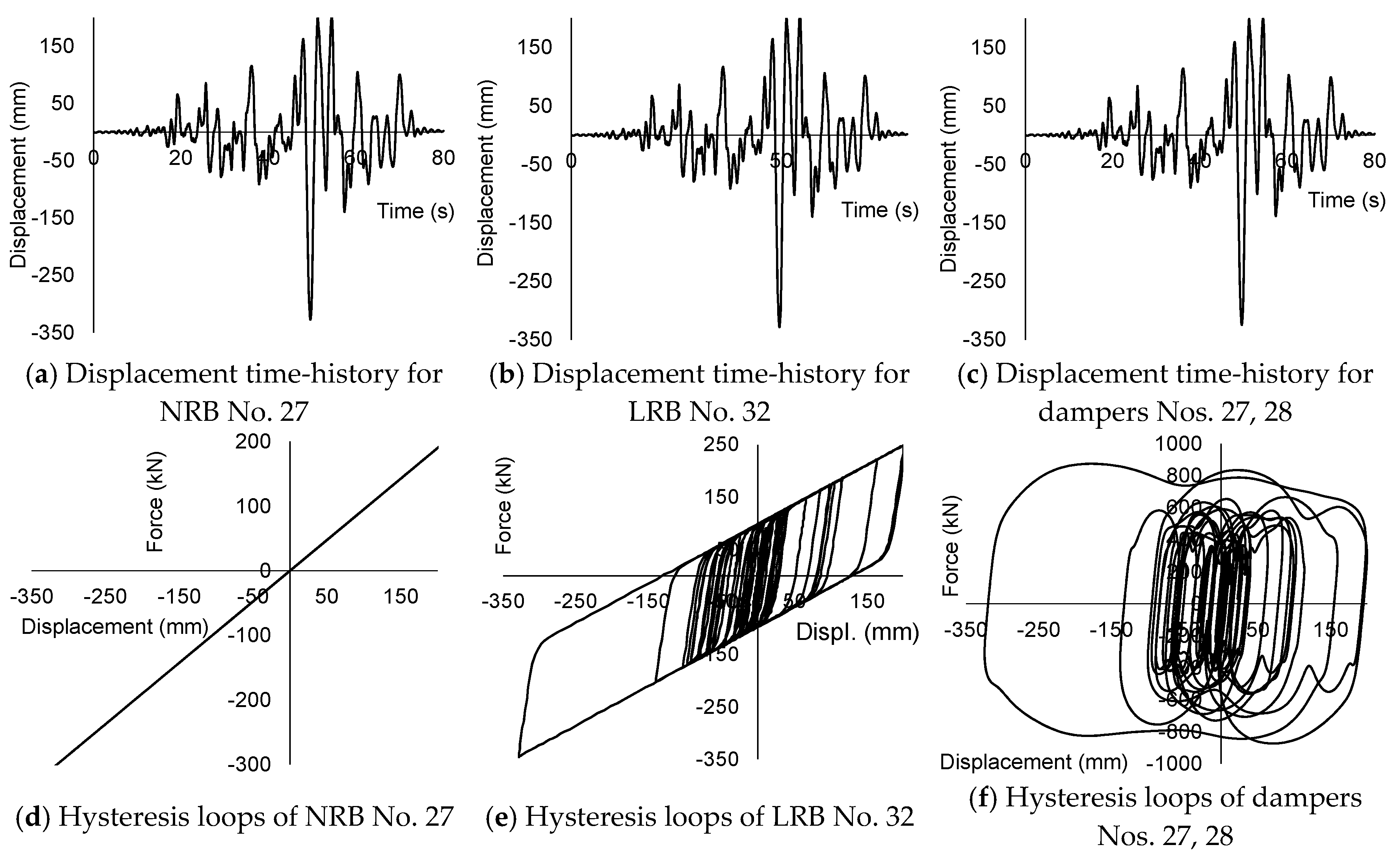
Figure 5 displays representative displacement time-history responses, and hysteresis loops of a natural rubber bearing (
Figure 5a,d), a lead-rubber bearing (
Figure 5b,e), and a viscous damper (
Figure 5c,f); the labeling of isolators and damper refers to
Figure 2c. All the plots in
Figure 5 correspond to the input NR1.1-7 in the
x direction (
Table 7).
Figure 5 shows a regular behavior; the similarity among the time-history plots in
Figure 5a–c confirms the rigid diaphragm effect of the ground floor slab. On the other hand, the hysteresis loops in
Figure 5d indicate a linear behavior, without any encompassed area; the loops in
Figure 5e have almost quadrilateral shape, typical of the plastification of metals. Finally, the shape of the hysteresis loops in
Figure 5f is closer to a rectangle than to an ellipse, this being consistent with the value of exponent α (α = 0.4,
Table 2).
Under fixed-base and base isolation conditions,
Table 8 and
Table 9 display average results for the “small” inputs NR0.9-3, NR0.9-6 and AW0.9-1 (
Table 6), and the “big” inputs NR1.1-5, NR1.1-7 and AW1.1-1 (
Table 7), respectively.
Table 8 and
Table 9 consider three cases: (a) input in
x direction, (b) input in
y direction, and (c) simultaneous actuation of
x and
y inputs; these situations are denoted by “
x”, “
y” and “
x +
y”, respectively. Each table contains, for every story, the maximum values of the following quantities: (a) drift angle, (b) shear force normalized with respect to the supported weight (shear coefficient) and (c) absolute acceleration normalized with respect to the maximum input acceleration; such maxima refer to the shaking duration. Noticeably, the results for fixed-base conditions are obtained by assuming a linear behavior of the building structure; they are included only for comparison purposes. Finally, the drift angle in the isolators is equivalent to the rubber shear strain, i.e., the ratio between drift displacement and rubber height (
Table 1).
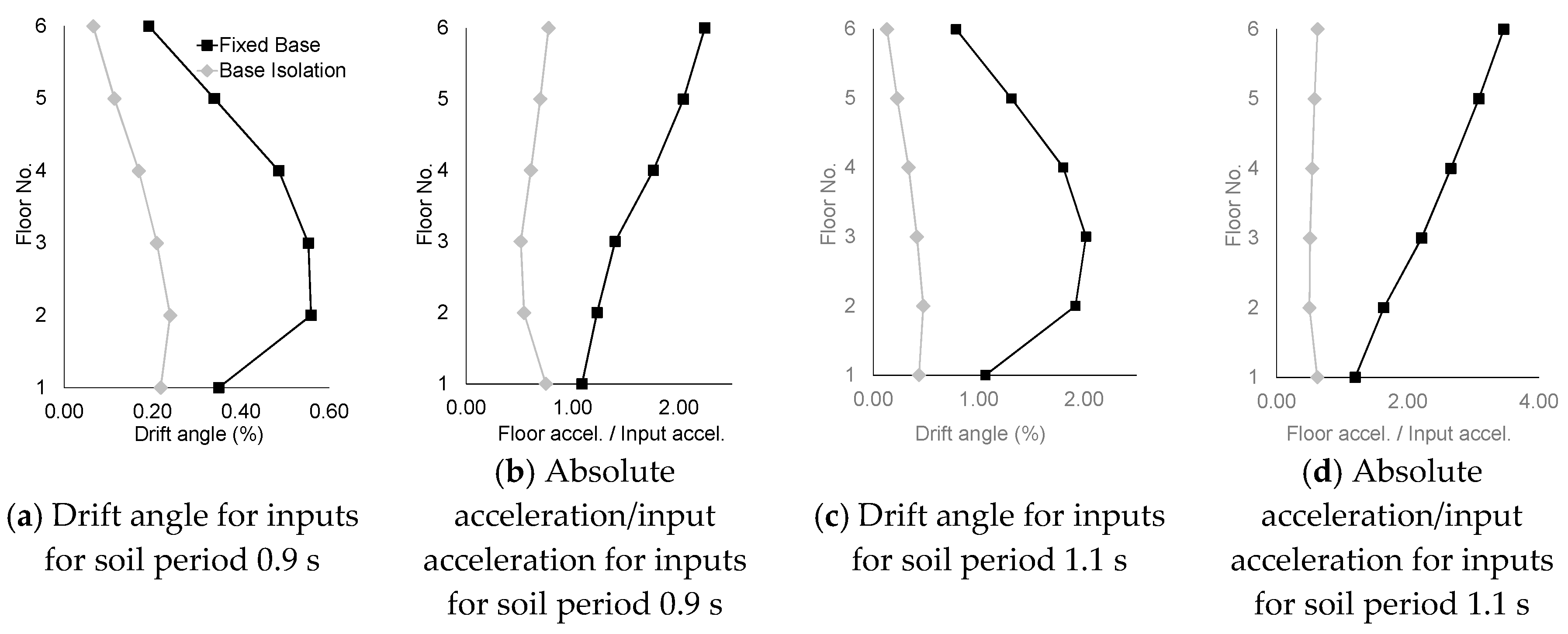
From the information in
Table 8 and
Table 9,
Figure 6 depicts, for further clarity, vertical profiles of drift angles (
Figure 6a,c) and normalized absolute accelerations (
Figure 6b,d). The results in
Figure 6 correspond to the “
x +
y” cases.
Table 10 displays the maximum drift angle, shear force and absolute acceleration for each input in
Table 8 and
Table 9. The maxima in
Table 10 refer to both the building height (1st to 6th stories) and the shaking duration. As in
Table 8 and
Table 9, the shear force and absolute acceleration are normalized with respect to the supported weight and the maximum input acceleration, respectively. Again, as in
Table 8 and
Table 9, the results for fixed-base conditions are obtained by supposing that the structure behaves linearly and, thus, are included only for comparison. For the base-isolated building,
Table 10 displays also the ratios between the absorbed energies (
Eζ,
EHD,
EHI) and the input energy
EI.
Eζ,
EHD and
EHI are the energy dissipated by the structural damping, the viscous dampers and the rubber bearings, respectively; at the end of the shake, the energy balance reads
EI ≈
Eζ +
EHD +
EHI.
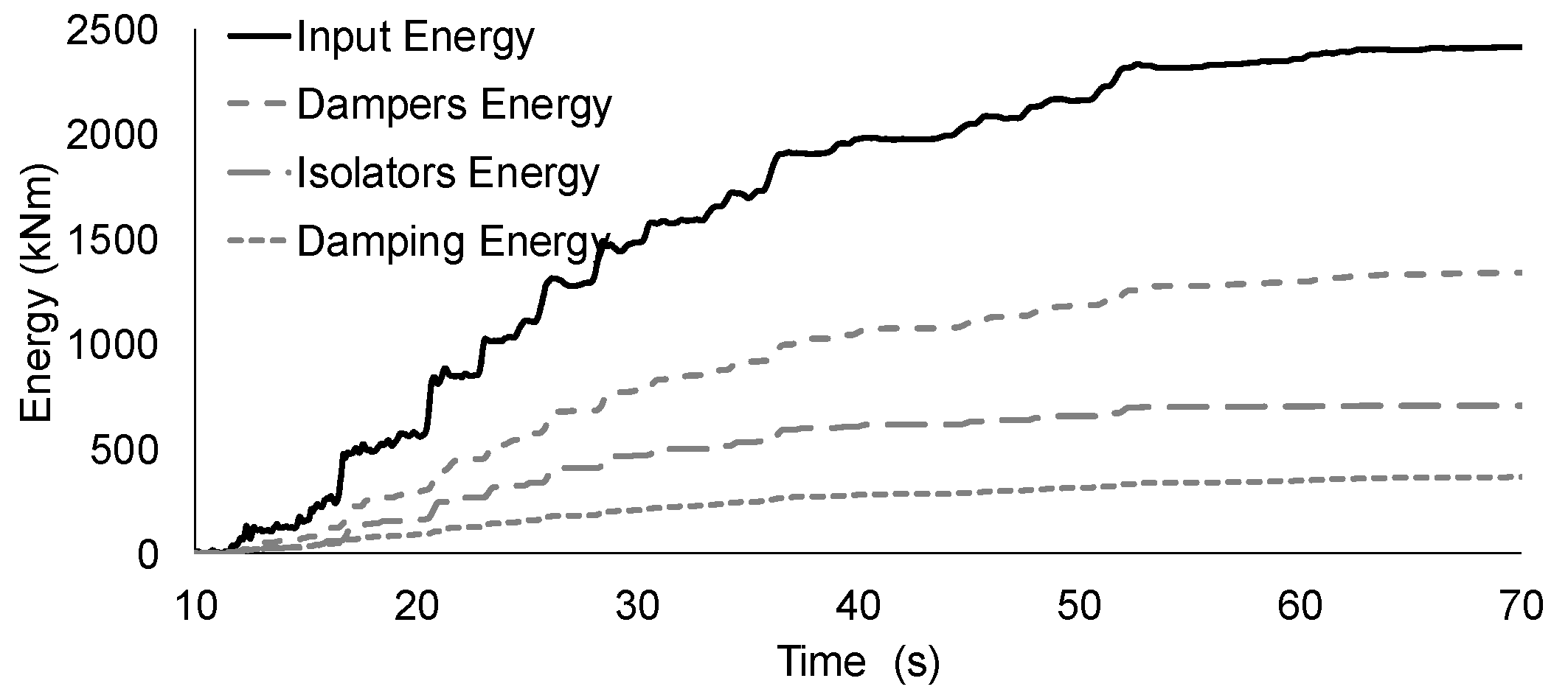
To analyze the time evolution of the energy balance,
Figure 7 represents the time-histories of the energies
EI,
Eζ,
EHD and
EHI (
Table 10) for the input NR0.9-6 (
Table 6); “Input Energy”, “Damping Energy”, “Dampers Energy” and “Isolators Energy” account for
EI,
Eζ,
EHD and
EHI, respectively.
- ▪
Drift angle in the superstructure. Except in few cases, the isolation reduces the drift displacements; for the 0.22 g inputs (
Table 9), that lessening is higher in the top stories. In base isolation conditions, the drift is rather moderate, even for the strongest inputs (
Table 9); this trend confirms that the assumption of linear behavior for the superstructure is correct. Finally, comparison between the results for inputs with maximum acceleration 0.1 g and 0.22 g shows that the reduction generated by the isolation is greater for the strongest inputs; this difference can be explained by the non-linear behavior of the lead-rubber bearings: the higher the shear strain, the higher the equivalent damping and the lower the effective secant stiffness, thus leading to a more intense isolation.
- ▪
Drift angle in the isolators. The shear strains for the inputs with acceleration 0.22 g (
Table 9) are more than 2.2 times higher than those for the inputs with 0.1 g (
Table 8). Obviously, this circumstance implies non-linear behavior of the lead-rubber bearings. On the other hand, no relevant permanent displacements are observed; this can be read as a satisfactory behavior of the isolation units.
- ▪
Shear coefficient in the superstructure. The isolation diminishes significantly the story shear forces; that decreasing is higher for the top stories and the strongest inputs. For the base-isolated building, the shear coefficient is near-constant along the building height; this seems to indicate a high participation of the first mode.
- ▪
Base shear coefficient. As expected, the isolation reduces appreciably the base shear force. For the less severe inputs (0.1 g,
Table 8), the diminution ranges between 55% (“
y” case) and 70% (“
x” case); for the strongest inputs (0.22 g,
Table 9), the lessening is roughly 75% in all the cases. This difference can be explained by the non-linear behavior of the lead-rubber bearings.
- ▪
Absolute acceleration in the superstructure. The absolute acceleration at the ground floor (above the isolation layer) is not reduced, compared to the driving input; in numerous cases, it is even slightly increased. This undesired circumstance might be due to the soft soil influence. However, in the other floors, the absolute acceleration is decreased, compared to the fixed-base case; more precisely, as is common in seismically isolated buildings, the reduction is higher in the top stories. As well, such decreasing is more important for the inputs with acceleration 0.22 g (
Table 9). It is well known that the spectral ordinate is roughly equivalent to the ratio between the ground and the top floor acceleration; accordingly, the percentages of reduction of the top floor absolute acceleration and the base shear force are rather similar.
- ▪
Dissipated energy.
Table 10 shows that the percentage of energy dissipated at the isolation interface (
EHD +
EHI, corresponding to viscous dampers and lead-rubber bearings, respectively) is above 80% of the input energy, being slightly higher for the stronger inputs (
Table 9). Comparison with the ordinary values of the ratio between the input and hysteretic energies [
45] shows that this percentage is clearly above the common demands in terms of energy contributable to damage. Plots from
Figure 7 show that the maximum values are obtained at the end of shake; this observation confirms that, for energy-based design, using the final values of energy is an adequate strategy.
- ▪
Simultaneity of the x and y inputs. As expected, for both the fixed-base and base-isolated buildings, the average drift ratios and shear coefficients for the simultaneous action of the
x and
y inputs are bigger than those generated by the
x and
y inputs acting separately. Conversely, regarding the absolute acceleration, the balance is unclear; this apparent inconsistency can be explained by the small building asymmetry (
Section 2.1), as any unidirectional input can generate responses containing
x,
y and torsion (φ) components (
Table 4). Broadly speaking, the strategy of combining the full value in one direction with 30% of the value in the orthogonal direction seems to be sufficiently conservative.
6.3. Results for the Rubber Bearings
Apart from the general considerations in
Section 6.2, this subsection discusses the performance of the rubber bearings in terms of buckling instability and shear deformation.
Table 11 shows, for the isolators Nos. 29, 32, 24 and 17 (
Figure 2), the maximum values of axial force, torsion angle and drift displacement. The displayed results correspond to the seismic inputs in
Table 10; the axial force generated by the gravity loads (combination
D + 0.5
L) is also shown (bottom row). In a similar way to
Table 8 through
Table 10, results for “
x”, “
y” and “
x +
y” inputs are presented; herein, results corresponding to the combination of the responses in “
x” and “
y” directions are also shown. These combinations are obtained according to the European regulations [
19]; two empirical criteria are considered: SRSS (square root of sum of squares), and
X + 0.3
Y or
Y + 0.3
X. X and
Y represent the effect of the inputs in
x and
y directions, respectively. For the axial force and torsion angle, the combinations are
, on one hand, and
X + 0.3
Y or
Y + 0.3
X, on the other hand; for the drift displacements, the combinations are
and
. Comparison among the cases “Combination” and “
x +
y”, shows low correlation; in some cases, the simplified values for “Combination” are over-conservative while in other cases they are extremely under-conservative. This shows that the usual empirical combination criteria are not always on the safe side.
The results in
Table 11 are used next to check, in terms of buckling instability and maximum shear strain, the requirements of the Chinese code [
12] and the European regulation [
20] (8.2.3.4).
Buckling stability. The Chinese code [
12] indicates that the average drift displacement in the rubber isolators should not exceed 0.55 times the rubber diameter. This condition is fulfilled in almost all the cases; more precisely, that threshold is only (slightly) exceeded in one case (corresponding to a “
x +
y” case). The Chinese code does not explicitly require consideration of that coincident actuation; for this unclear situation, the European regulation [
21] is considered instead. In that code, it is required that the demanding axial force does not exceed the critical load of each isolator unit; such force is given by
Pcr = λ
G Ar a′
S/
Tq, where λ = 1.1 (for circular devices),
G is the rubber shear deformation modulus,
Ar is the rubber bearing plan area,
a′ is the device diameter,
S is the shape factor (ratio between the diameter of the device and the thickness of each rubber layer) and
Tq is the total rubber thickness. By neglecting (conservatively) the stiffening effect of the lead plug, the following two values of the critical load are obtained:
Table 11 shows that the maximum axial forces in the 700 and 800 mm isolators are
NEd,max = 4536 kN (device No. 24, input NR1.1-7, case “
x +
y”) and
NEd,max = 6099 kN (device No. 17, input NR1.1-7, case “
x +
y”), respectively; thus, in both cases
NEd,max <
Pcr/4. On the other hand, [
21] prescribes that it should be also checked that δ ≤ 0.7, where δ is the ratio between the design drift displacement
dbd and the device diameter; the design drift is conservatively taken as the maximum value in
Table 11: δ = 0.7 and 0.61 for 700 and 800 mm isolators, respectively. Therefore, this criterion is fulfilled in both types of device.
Maximum shear strain. In the European code [
21], the maximum design shear strain is given by ε
t,d = ε
c,E + ε
q,max + ε
α,d; in this expression, ε
c,E = 6
S/
Ar E′
c,
E′
c = 3
G (1 +2
S2), ε
q,max =
dbd/
Tq ≤ 2.5, and ε
α,d = 0.003 (
a′
2 +
b′
2)
tr/2 Σ
t3r, where
a′ =
b′ (for circular devices), and
tr is the thickness of each rubber layer. For the 700 mm diameter isolators,
E′
c = 2882 MPa, and for the 800 mm ones,
E′
c = 2614 MPa; then:
Since both above results are smaller than 7/γm (where γm is a safety factor, being γm = 1 in this case), this criterion is fulfilled.
6.4. Influence of Soil–Structure Interaction
To investigate the SSI effect,
Table 12 displays, for the inputs in
Table 10, the base shear coefficient in the building (ratio between the base shear force and the building weight), and the shear strain in the rubber bearings (ratio between the isolators drift displacement and the rubber height). Three situations are considered in
Table 12: fixed-base without SSI, base isolation with SSI, and base isolation without SSI; like in
Table 8 through
Table 10, the fixed-base results are determined by assuming linear behavior, and are only displayed for reference. SSI-a and SSI-b have the same meaning than in
Table 5. Comparison between the results for base isolation with and without SSI shows that its effect is only moderate, both in terms of base shear and shear strain; therefore, it can be globally concluded that SSI does not play a leading role. The results for both SSI models are rather similar, thus showing little influence of the piles’ vertical stiffness. Comparison between the results for base isolation and fixed-base shows that in all the cases the isolation reduces significantly the base shear; hence, its performance is satisfactory.
6.5. Influence of Changes of the Isolation Units’ Parameters
This section discusses the behavior of the isolation system when the parameters of the isolation units are modified due to heating, rate of loading, scragging, aging, environmental conditions, and manufacturing irregularities. Given the absence of specific prescriptions in the Chinese regulations, the recommendations of [
14] are considered. These documents propose a conservative formulation, to be used when no more specific information is available. The major mechanical parameters of the rubber bearings are modified with a factor (λ) that accounts for the aforementioned issues; both maximum and minimum values of λ need to be considered. In NRB, the λ factor affects the stiffness; their maximum and minimum values are 1.83 and 0.77, respectively. In LRB, the λ factor affects the post-yield stiffness and the yielding force; their maximum and minimum values are 1.83/1.84 and 0.77, respectively (1.83 and 1.84 correspond to post-yield stiffness and yielding force, respectively). To analyze the performance of the base isolation under these extreme conditions,
Table 13 displays, as in
Table 12, the base shear coefficient and the shear strain in the isolation units for the inputs in
Table 10. In
Table 13, “Lower bounds” and “Upper bounds” refer to the maximum and minimum values of the λ factor, respectively. To understand the results from
Table 13, it should be kept in mind that λ > 1 corresponds to stiffer and more resistant devices, while λ < 1 refers to opposite situations.
Results in
Table 13 reflect a regular and expected behavior, in which the stiffer and more resistant devices (upper bounds) lead to higher base shear force and lower shear strain (i.e., less intense isolation). Comparison with
Table 12 shows that their results (normal condition of the rubber bearings) lie in between those for the lower and upper bounds, and that in all the cases the base isolation reduces significantly the base shear; this last property can be read as a proper performance of the base isolation, even under extreme modifications in the parameters of the rubber bearings. The only exception to the aforementioned regularity is that, for the input NR1.1-5 in the
y direction, the shear strain under normal conditions (
Table 12) is higher than the corresponding values in
Table 13. This circumstance can be explained by the high uncertainties inherent to any non-linear dynamic (time-history) analysis.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}