

Study on Load-Bearing Characteristics of Converter Trunnion Bearing

Abstract
:1. Introduction
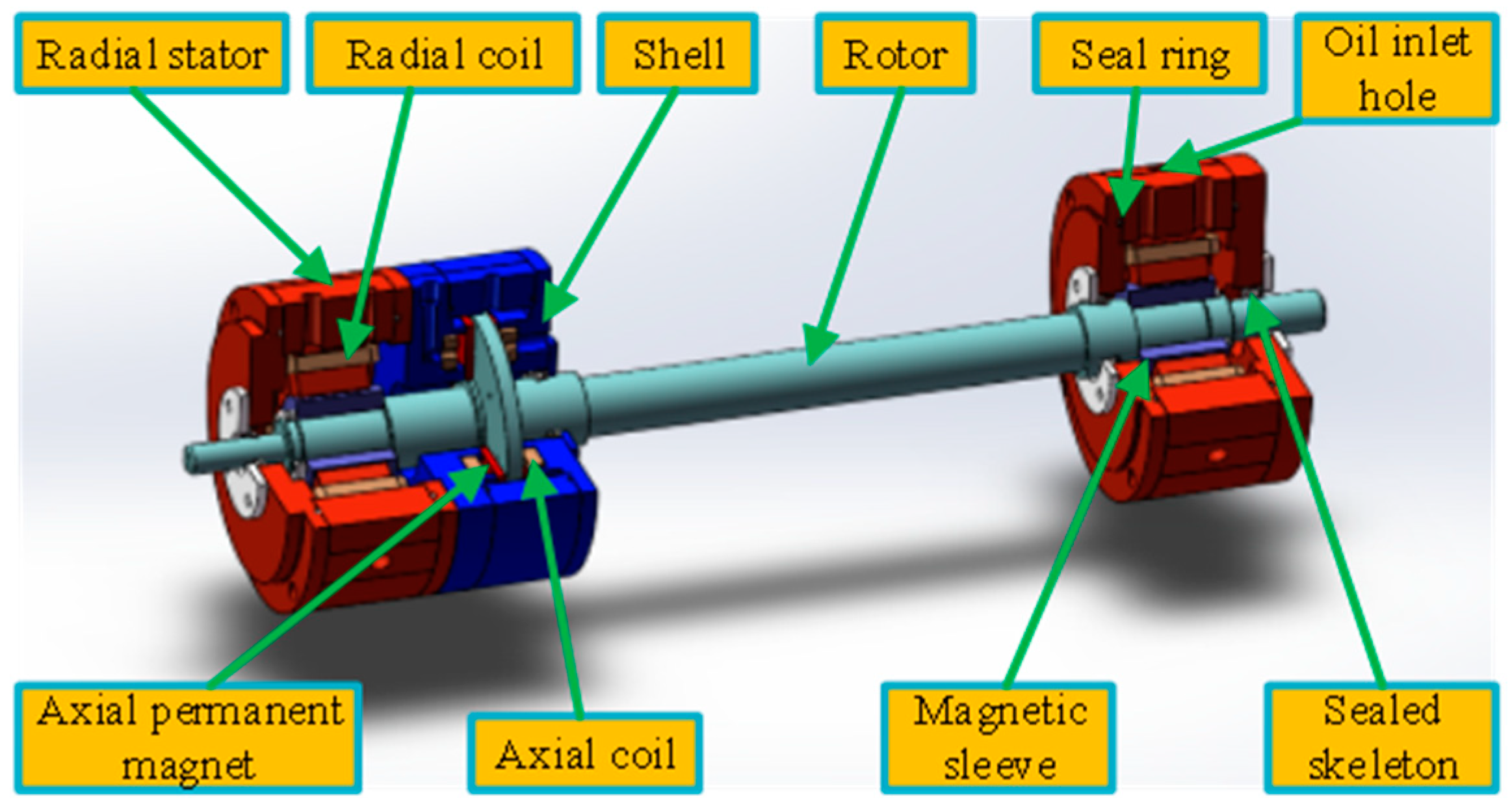
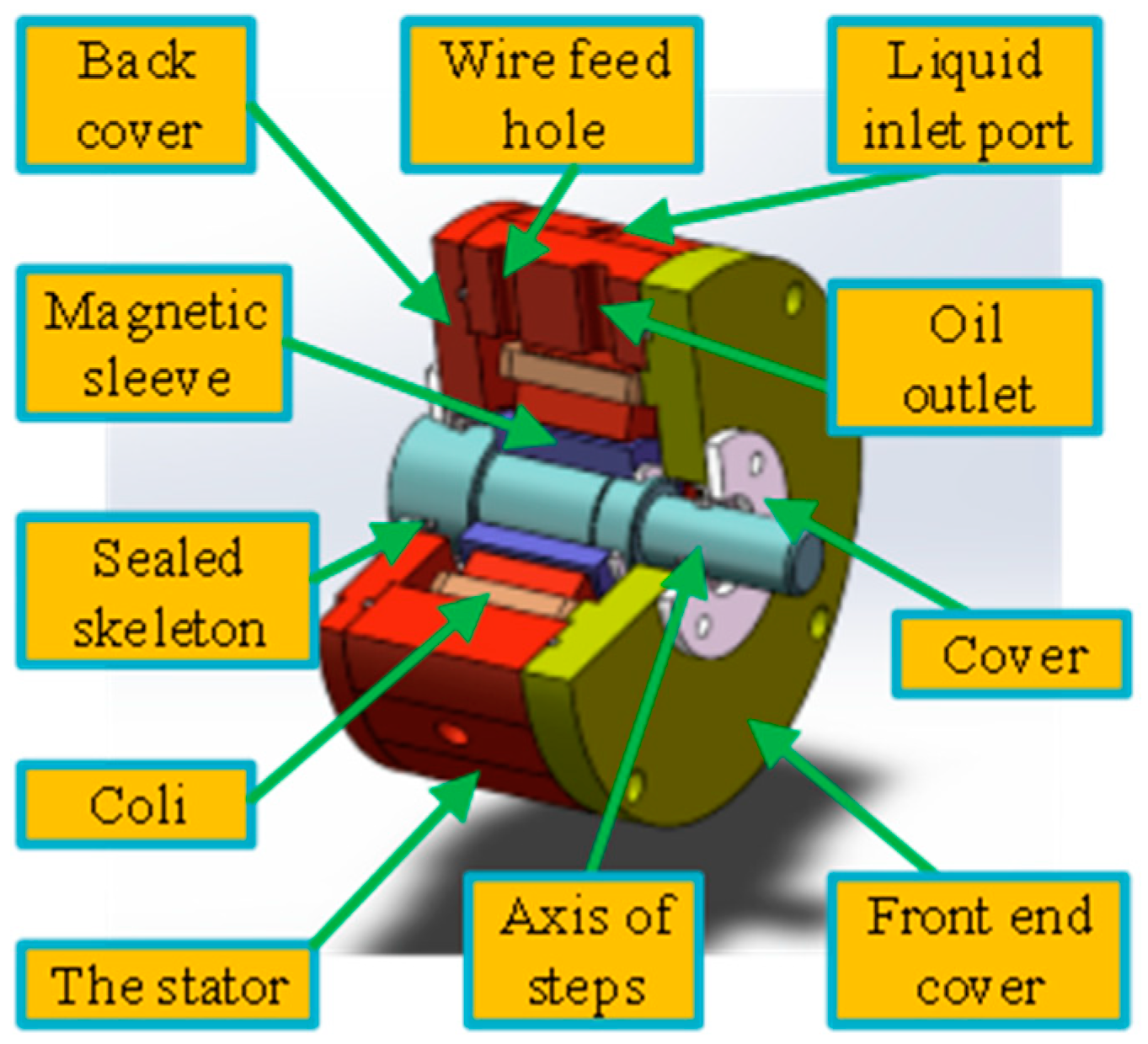
2. Magnetic Fluid Bearing System and Working Principle
3. Mathematical Analysis of Bearing Capacity of Radial Magnetic Liquid Bearing
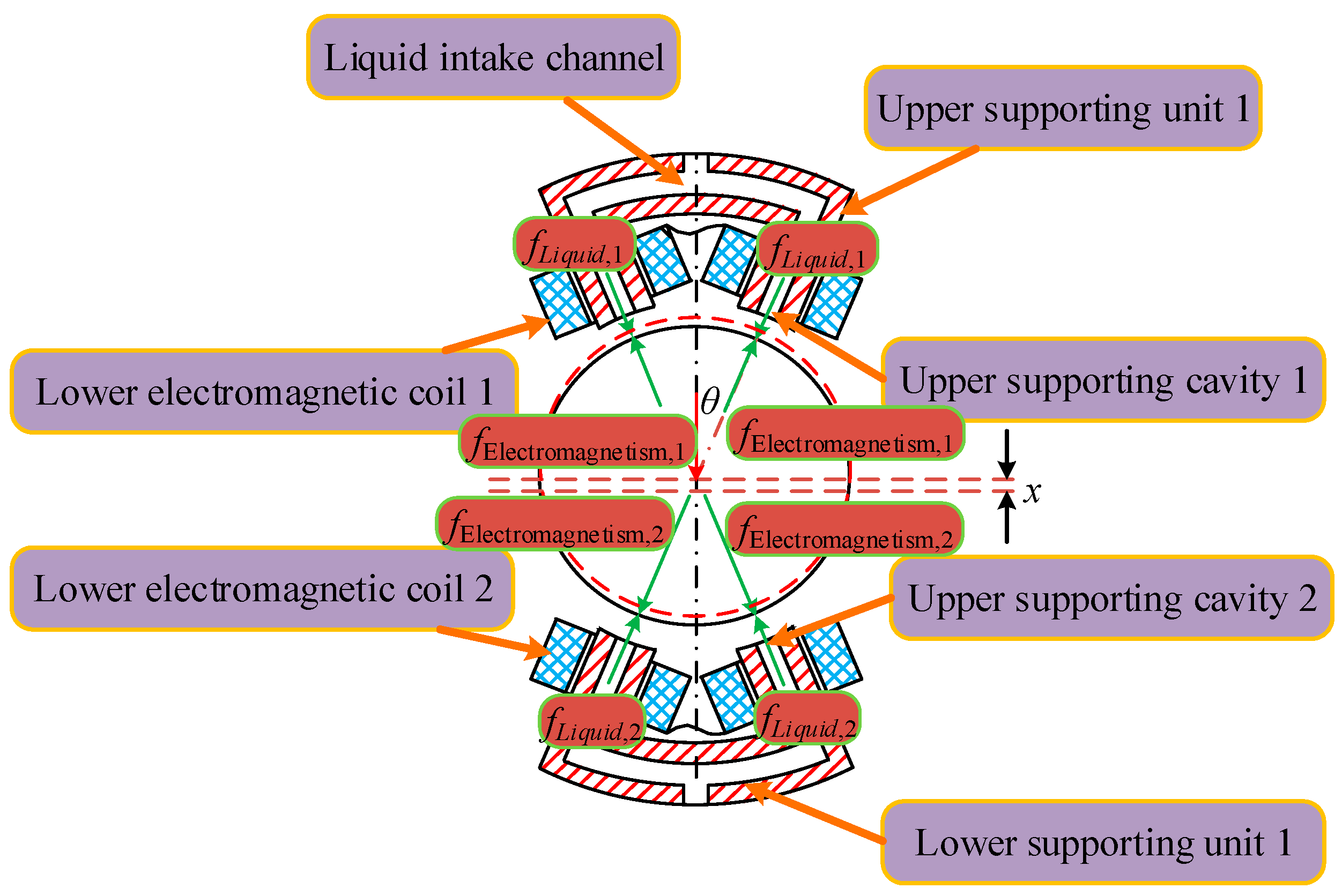
3.1. Force Analysis of Radial Magneto-Liquid Bearing
3.2. Radial Support System Initial State Mathematical Model
- Lubricating fluid is laminar flow state, ignoring the liquid inertia force;
- Ignore the viscosity-pressure characteristics of liquid;
- Ignore winding magnetic flux leakage;
- The magnetic flux is evenly distributed in the magnetic circuit, all through the stator core, ignoring the hysteresis;
- Calculated according to the single degree of freedom system.
| A0—— | Cross-sectional area of magnetic field air gap, m2; |
| μ0—— | Air permeability, H/m; |
| N—— | Number of coil turns, Zero dimension; |
| i0—— | Initial coil current, A; |
| x0—— | Air gap length between stator and rotor core, m; |
| α—— | Angle between center line of supporting cavity and center line of rotating shaft, °. |
| —— | Electromagnetic attraction of support unit, N; |
| —— | Support unit hydrostatic bearing force, N; |
| p0—— | Support cavity pressure, Pa; |
| Ae—— | Bearing area of supporting cavity, m2; |
| α—— | Angle between center line of supporting cavity and center line of rotating shaft, °; |
| q0—— | Flow of supporting cavity, m3/s; |
| R0—— | Fluid resistance of supporting cavity, Pa·s/m3. |
3.3. Mechanical Model Construction of Radial Support System
| de—— | Thickness of chromium plating layer of rotor, m. |
| Ab—— | Extrusion area of supporting cavity, m2. |
| —— | Support unit hydrostatic bearing force, N; |
| q—— | Input flow of supporting unit, L/min; |
| ic—— | Control current, A; |
| Kp—— | Proportional feedback coefficient of control system, Zero dimension; |
| Kd—— | Differential feedback coefficient of control system, Zero dimension; |
| —— | Rotor vibration velocity, m/s. |
| m—— | Rotor quality, kg; |
4. Weak Coupling Calculation of Bearing Characteristics of Radial Supporting System
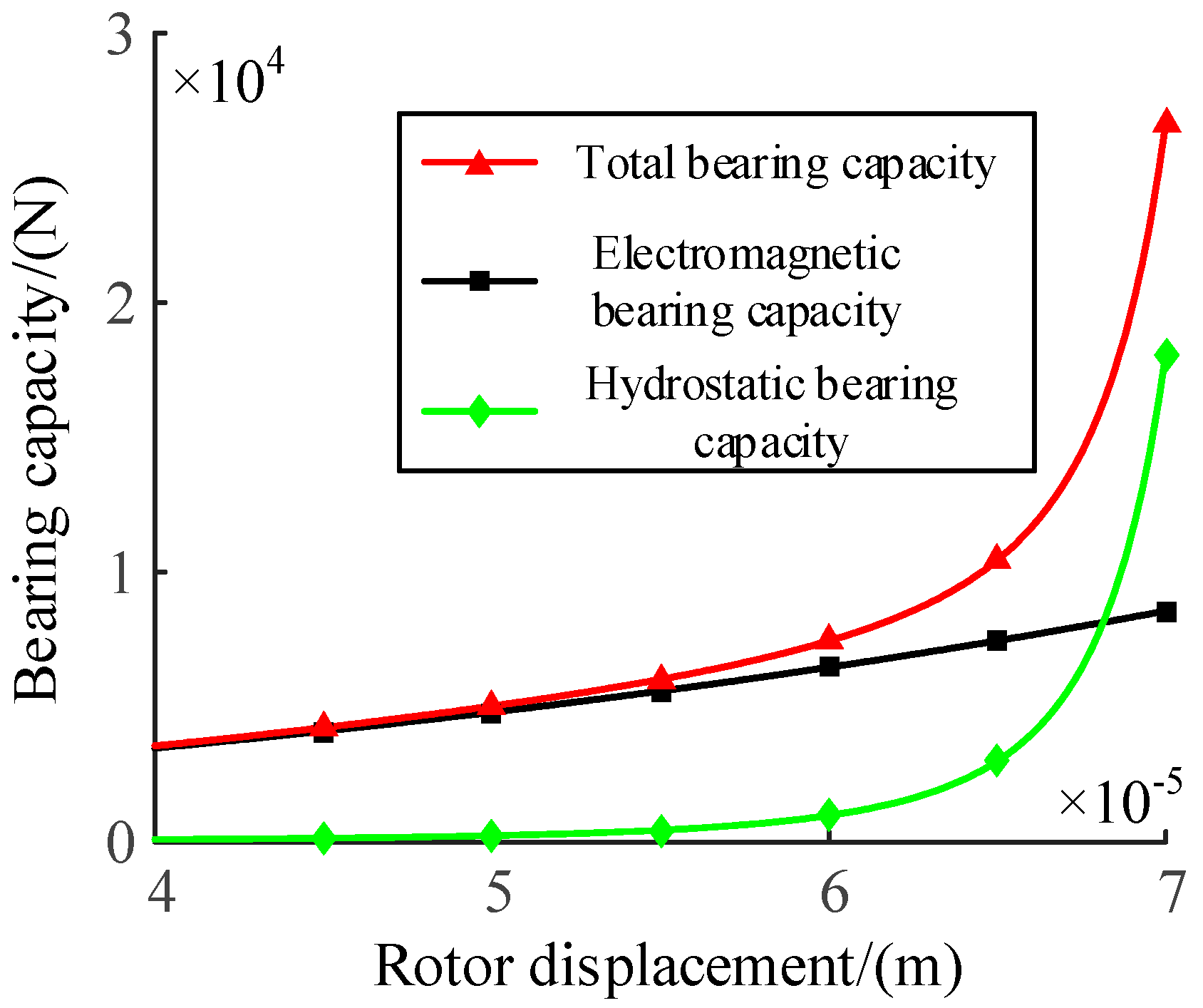
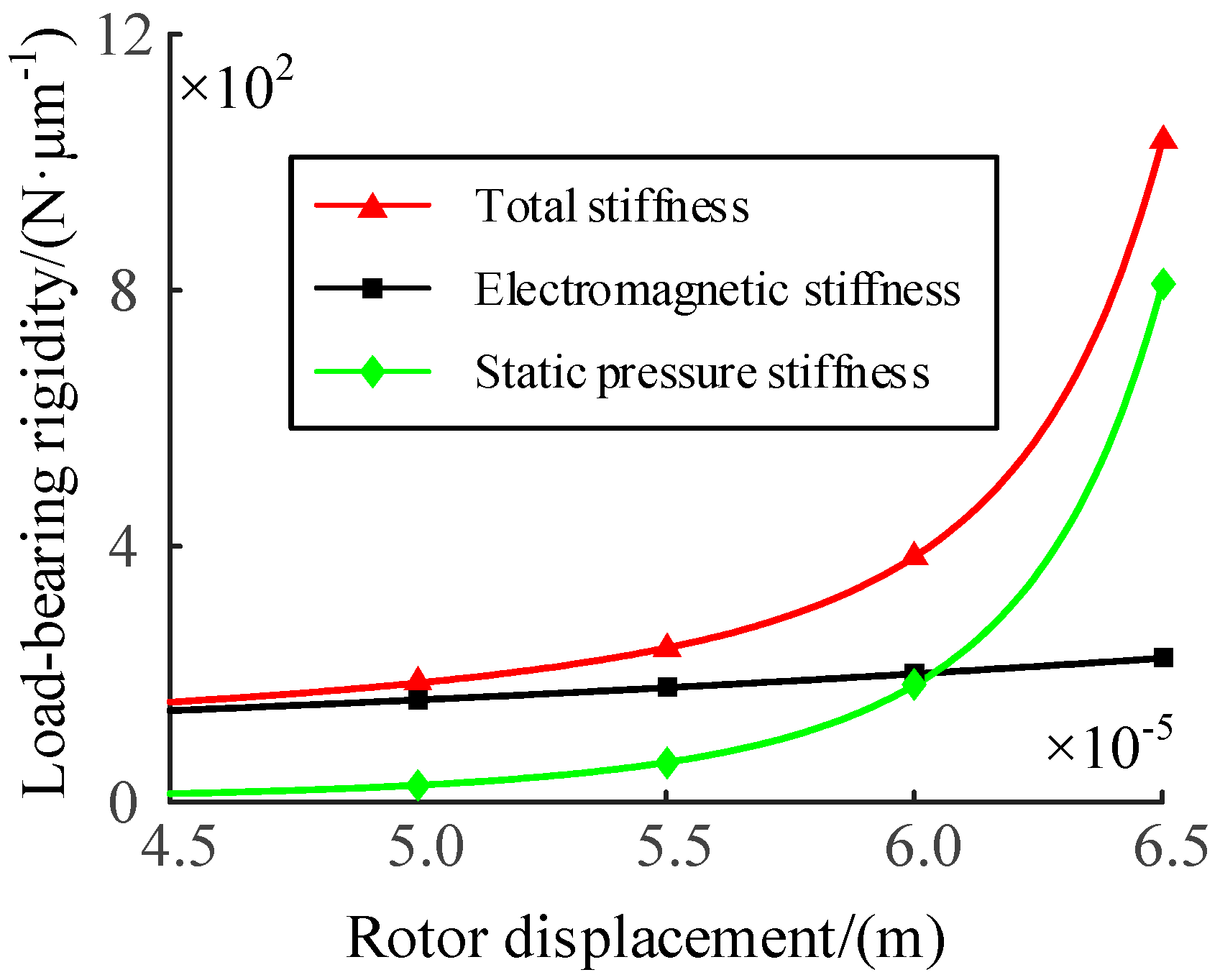
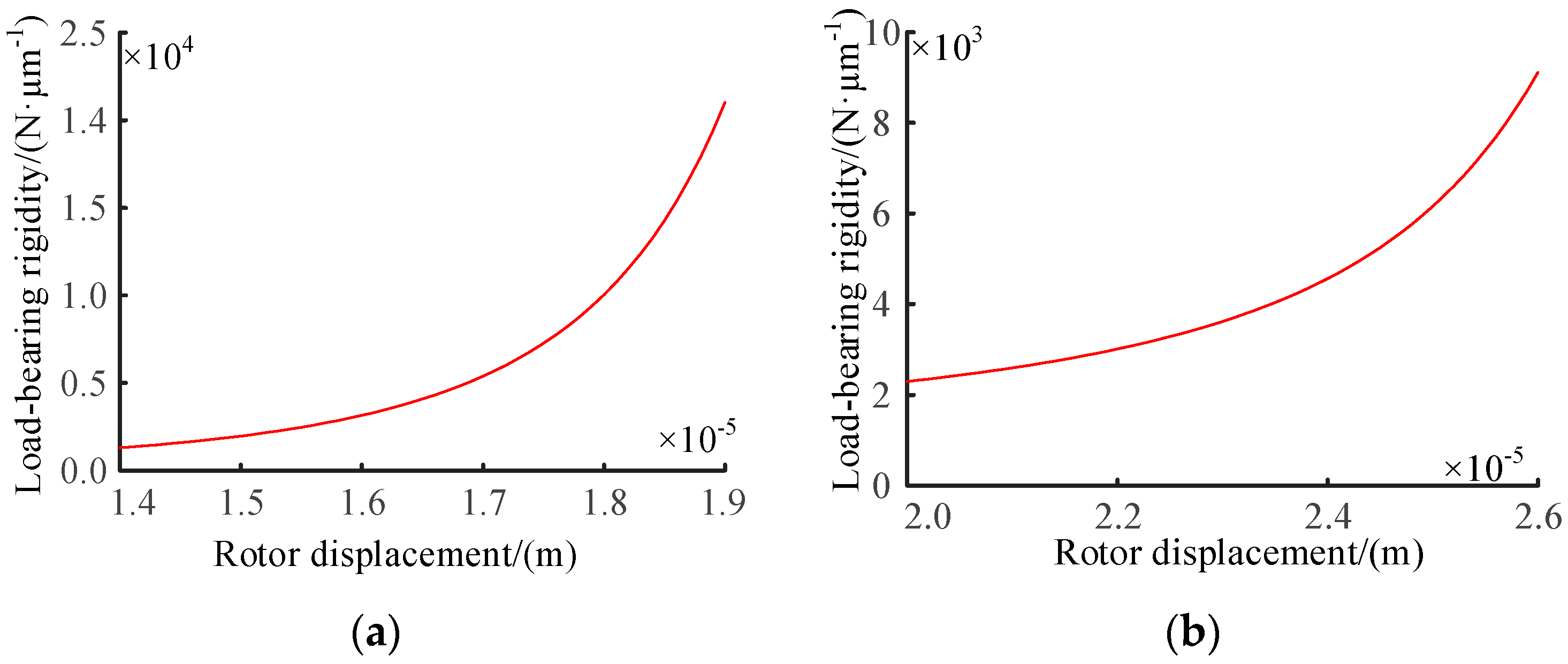
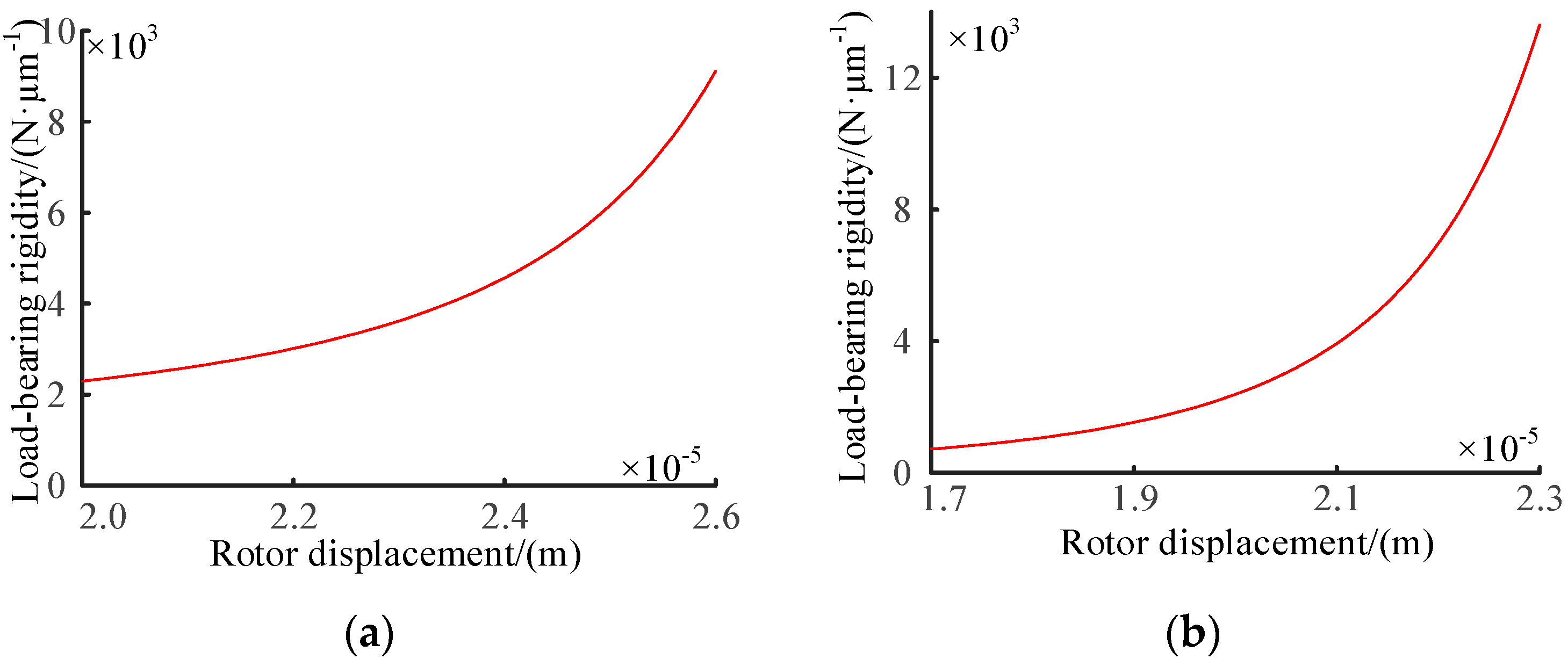
4.1. The Relationship of Bearing Force and Bearing Stiffness with Rotor Displacement
4.2. Influence of Key Parameters on Bearing Capacity and Rigidity
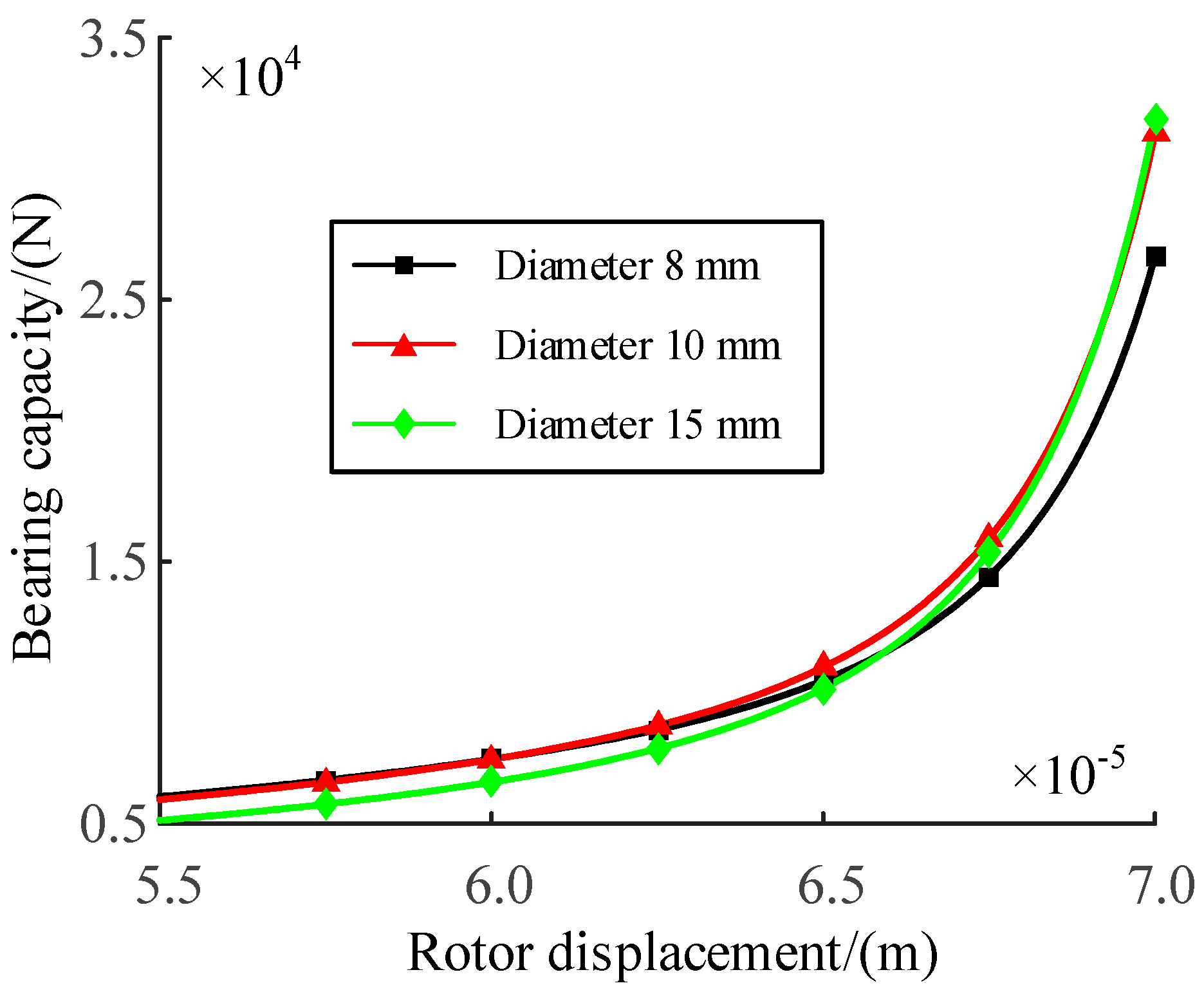
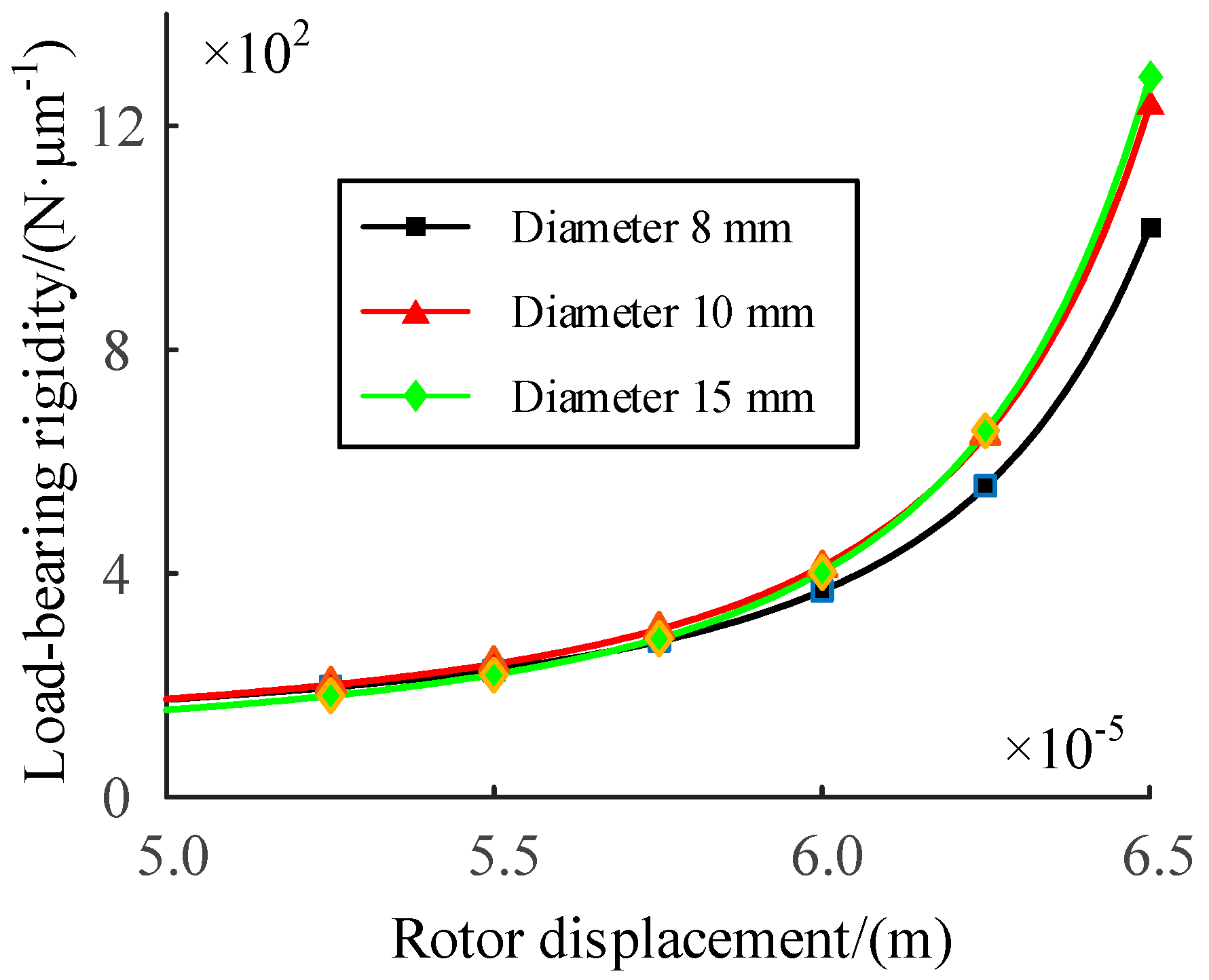
4.2.1. Influence of Bearing Cavity Diameter
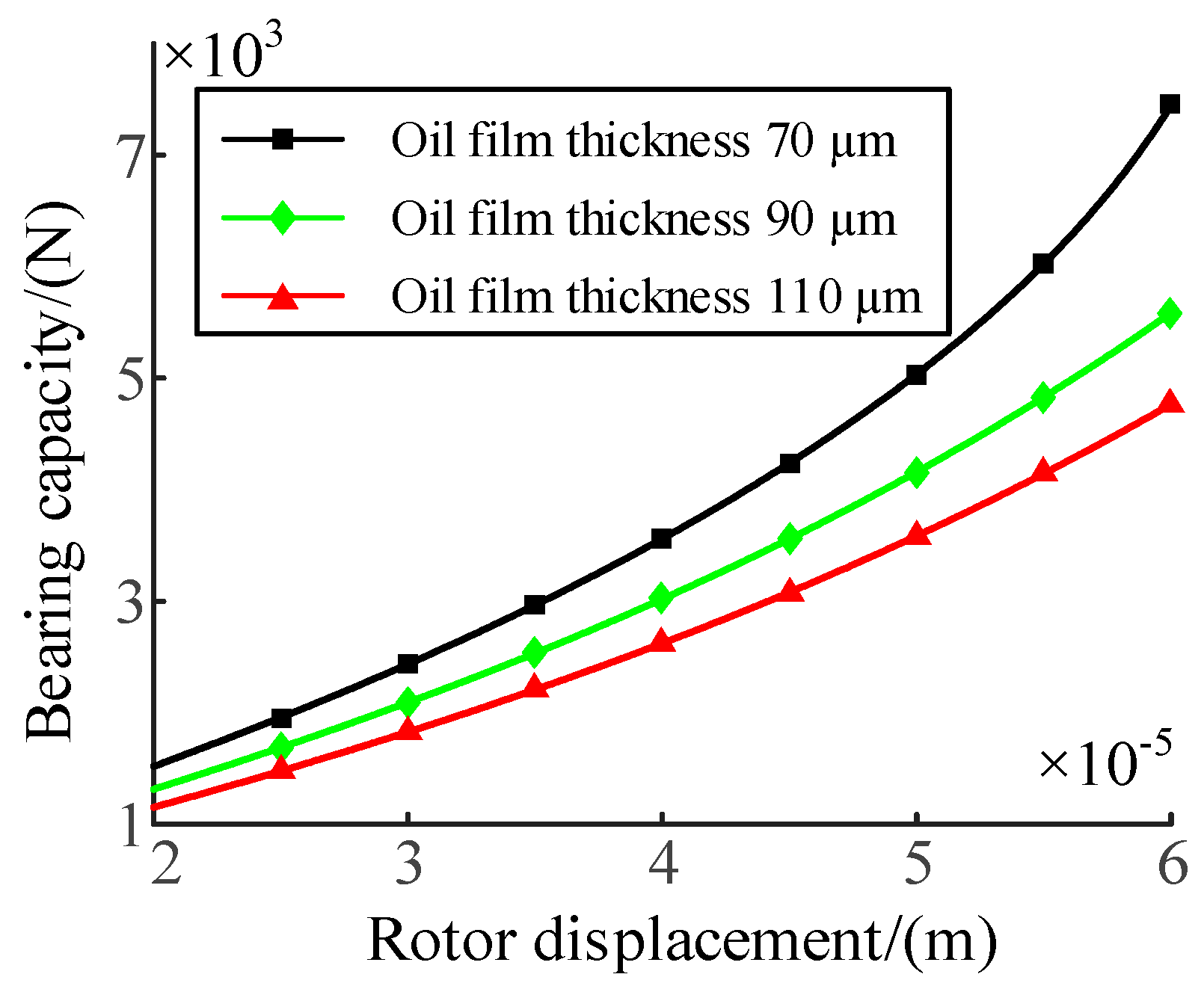
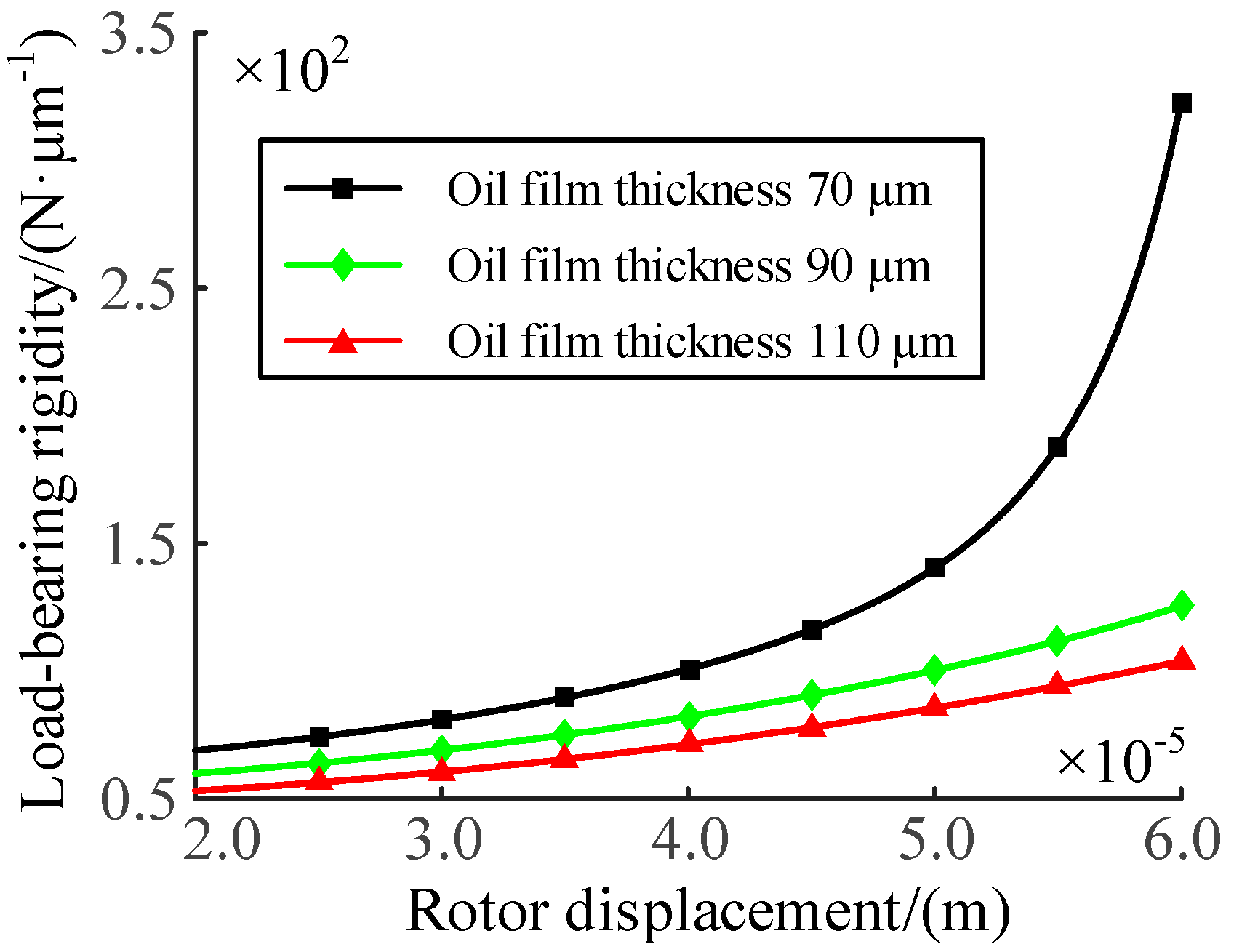
4.2.2. Influence of Oil Film Thickness
4.2.3. Influence of Input Current
4.2.4. Influence of Oil Inlet Flow
5. Conclusions
- (1)
- For the trunnion bearing, this paper proposes a new coupling support technology combining electromagnetic support and hydrostatic support-hydro-magnetic bearing, which can control electromagnetic and hydrostatic pressure in real time, and it is convenient to adjust the operation of tilting mechanism. It has the advantages of fast response speed and reducing the probability of dry friction.
- (2)
- The total bearing capacity and stiffness increase with the increase of rotor displacement. When the rotor displacement is less than 68 μm, the system bearing capacity is mainly provided by the electromagnetic support system. When the rotor displacement is greater than 68 μm, the system stiffness is mainly provided by the hydrostatic support system.
- (3)
- The supporting cavity with a diameter of 10 mm has the best supporting performance, and the bearing capacity increases significantly when the oil film thickness is 70 μm. Such size parameters are conducive to supporting the weight of furnace body, liquid metal, steel slag, suspension reducer and other equipment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tian, J.; Wang, Y.; Zhao, H. Geometrical Design for a Large Magnetic Supporting System Considering Physics Coupling. Mach. Tool Hydraulics 2007, 35, 16–18. [Google Scholar]
- Qiu, J. Study on Spindle Dynamic Errors of Domestic NC Machine Tools. Adv. Mater. Res. 2013, 690–693, 3279–3283. [Google Scholar] [CrossRef]
- Qu, C.N.; Wu, L.S.; Xiao, Y.C.; Zhang, S. Summary of guideway technology research on machine tools. Manuf. Technol. Mach. Tool 2012, 594, 30–36. [Google Scholar]
- Xiong, W.L.; Sun, W.; Liu, K.; Xu, M.; Pei, T. Active Magnetic Bearing Technology Development in High-Speed Motorized Spindles. J. Mech. Eng. 2021, 57, 1–17. [Google Scholar]
- Wang, X.H.; Yang, F.F.; Zhao, Q. Dynamic Analysis of the Aero-engine Rotor Drop after the Failure of Active Magnetic Bearings. Gas Turbine Exp. Res. 2019, 32, 1–7. [Google Scholar]
- Li, H.; Shuai, C.G.; Xu, W. Research on the Axial Bearing Capacity of Marine Permanent Magnetic Thrust Bearing. Ship Sci. Technol. 2019, 41, 105–109. [Google Scholar]
- Zhang, J.; Zhang, F.; Zhu, Z.D.; Bai, W. Analysis of Gas Flow Field Characteristics Based on CFX Air Magnetic Suspension Bearing. Mech. Eng. Autom. 2019, 6, 57–59+62. [Google Scholar]
- Li, W.J.; Zhang, G.M.; Wang, X.W.; Qiu, Q. Design of Superconducting Electromagnetic Hybrid Magnetic Suspension Bearing for Flywheel Energy Storage System. Trans. China Electrotech. Soc. 2020, 35, 10–18. [Google Scholar]
- Yan, G.; Yuan, X.Y.; Chen, R.L.; Jia, Q.; Jin, Y. Structure Design and Performance Analysis of Superconducting Magnetic-Liquid Thrust Bearings. China Mech. Eng. 2021, 32, 32–39. [Google Scholar]
- He, T.; Wang, J.; Yao, S.; Shi, J.; Zhang, Q.; Xu, H.; Zhao, B. Study on Dynamics and Tribological Properties of Composite Water-lubricated Bearing with Magnetic Support. J. Propuls. Technol. 2022, 43, 200401. [Google Scholar]
- Lu, Q.Q.; Li, M.; Yang, J.H.; Xu, J.W.; Hu, J. Fault Diagnosis for Converter Trunnion Bearings Based on Acoustic Emission Testing Technology. Bearing 2013, 1, 46–50. [Google Scholar]
- Cheng, X.W.; Qi, L.Y. Nonlinear Dynamic Analysis of Converter Tilting Mechanism Based on Bond Graph. Mech. Eng. Autom. 2017, 4, 28–30. [Google Scholar]
- Zhao, J.H.; Zhang, B.; Chen, T.; Wang, Q.; Gao, D. Influence of Liquid Film Thickness on Bearing Characteristics of Magnetic-Liquid Suspension Guide-Way. J. Eng. 2019, 13, 293–298. [Google Scholar] [CrossRef]
- Chen, L.W.; Gao, D.R.; Zhao, J.H.; Zhao, J. Study on Temperature Rise and Thermal Deformation of Rotor Caused by Eddy Current Loss of Magnetic-Liquid Double Suspension Bearing. Int. J. Model. Identif. Control. 2021, 37, 267–274. [Google Scholar] [CrossRef]
- Du, X.X.; Sun, Y.H. Comparison of Static and Dynamic Characteristics of Electromagnetic Bearing Using Machine Learning Algorithm. Int. J. Grid Util. Comput. 2022, 13, 87–95. [Google Scholar] [CrossRef]
- Weng, G.; Tian, X.; Zhao, J.; Zhang, B.; Wang, Q.; Chen, T.; Liu, J.; Gao, D. Determinate Mathematical Model of Couple Bearing Force of Magnetic-Liquid Suspension Guide-Way with Complicate Constraint. High Technol. Lett. 2018, 24, 440–448. [Google Scholar]
- Chen, L.W.; Gao, D.R.; Zhao, J.H.; Zhao, J. Study on The Law of The Structure Parameters Influence on Thermal Deformation of Magnetic Poles of Magnetic-Liquid Double Suspension Bearing. Int. J. Comput. Appl. Technol. 2022, 69, 253–262. [Google Scholar] [CrossRef]
- Yu, L. Controllable Magnetic Suspension Rotor System; Science Press: Beijing, China, 2003; pp. 108–233. [Google Scholar]
- Song, H.Q. Engineering Fluid Mechanics; Metallurgical Industry Press: Beijing, China, 2018; pp. 21–99. [Google Scholar]
- Wu, X.C. Research on Static Bifurcation and Hopf Bifurcation of Magnetic Fluid Double Suspension Bearing. Master’s Thesis, Yanshan University, Qinhuangdao, China, 2020. [Google Scholar]
- Ono, S.; Uchikoshi, T.; Hayashi, Y.; Kitagawa, Y.; Yeh, G.; Yamaguchi, E.; Tanabe, K. A Heterothermic Kinetic Model of Hydrogen Absorption in Metals with Subsurface Transport. Metals 2019, 9, 1131. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Zhao, G.S.; Song, Y.B. MATLAB Modeling and Simulation Practical Tutorial; China Machine Press: Beijing, China, 2018; pp. 161–231. [Google Scholar]
- Wang, X.; Rui, X. Dynamics modeling and simulation of tracked armored vehicle with planar clearance trunnion-bearing revolute joint. J. Mech. Sci. Technol. 2021, 35, 2285–2302. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Current i0/A | Initial Oil Inlet Pressure p0/MPa | Initial Rotation Speed n/r·min−1 | Oil Temperature T/°C | Oil Film Thickness μm |
|---|---|---|---|---|
| 2 | 1 | 500 | 20 | 70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Cui, B.; Wu, X.; Yin, C.; Zhao, J. Study on Load-Bearing Characteristics of Converter Trunnion Bearing. Metals 2023, 13, 549. https://doi.org/10.3390/met13030549
Chen L, Cui B, Wu X, Yin C, Zhao J. Study on Load-Bearing Characteristics of Converter Trunnion Bearing. Metals. 2023; 13(3):549. https://doi.org/10.3390/met13030549
Chicago/Turabian StyleChen, Liwen, Bingyan Cui, Xiaochen Wu, Chenxu Yin, and Jianhua Zhao. 2023. "Study on Load-Bearing Characteristics of Converter Trunnion Bearing" Metals 13, no. 3: 549. https://doi.org/10.3390/met13030549