Holistic Approach on the Research of Yielding, Creep and Fatigue Crack Growth Rate of Metals Based on Simplified Model of Dislocation Group Dynamics


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Dislocation Groups Dynamics Aimed for Applications to Problems of Yielding, Creep, and Fatigue [2,9,10]
2.1. Model, Basic Equation and Method of Analysis [2,9,10]
2.2. Discrete Dislocation Groups Dynamics of Free Expansion and Similarity Law of Dislocation Flow [9,10]
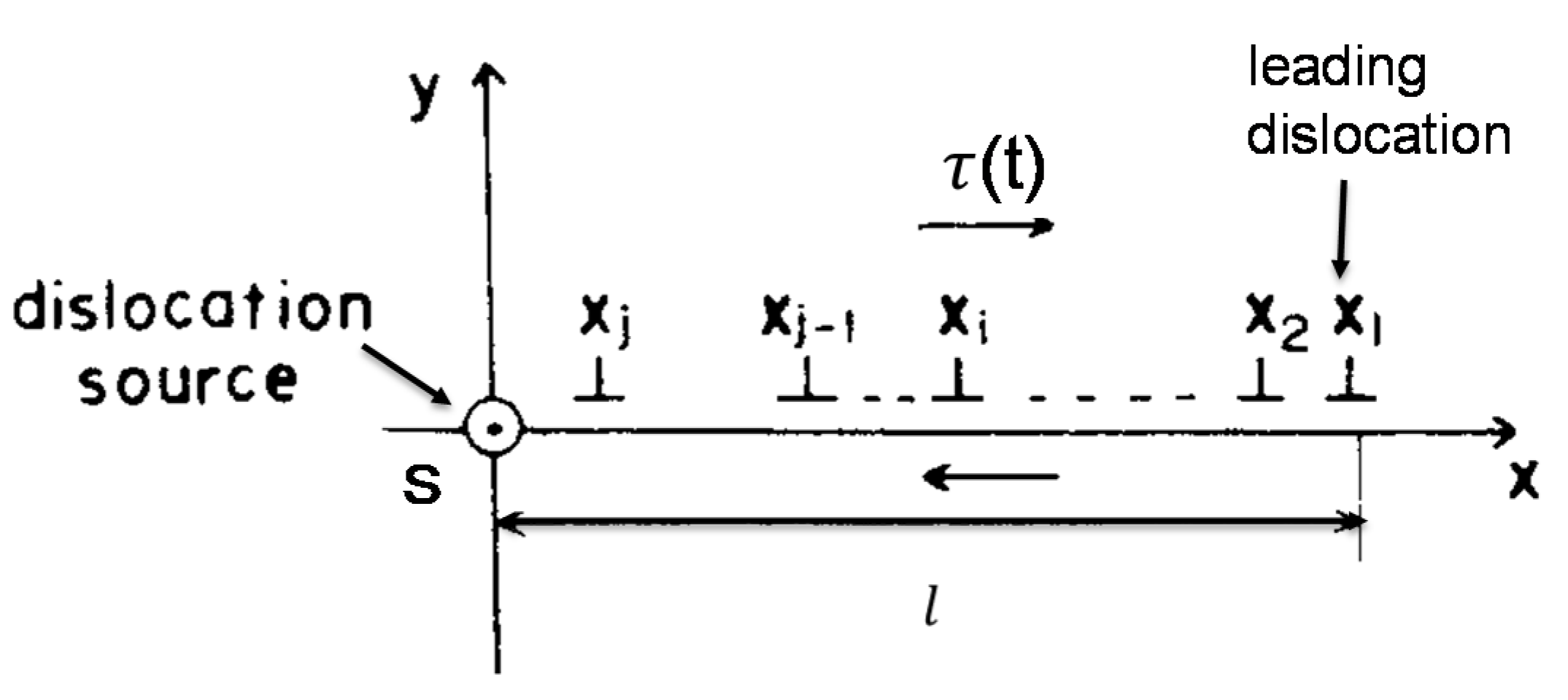
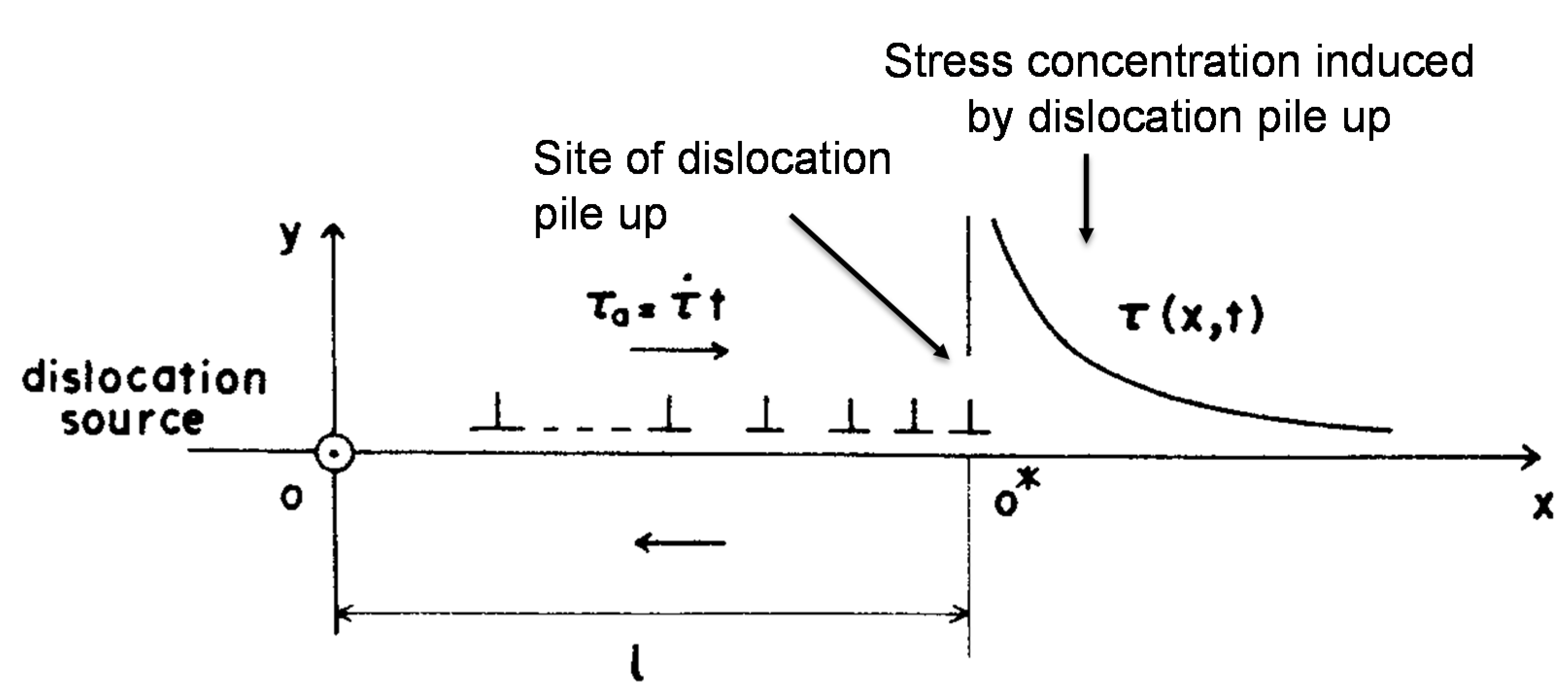
2.3. Dislocation Pile-Up Induced by Local Stress Field [2]
2.3.1. Model, Basic Equation and Analysis [2]
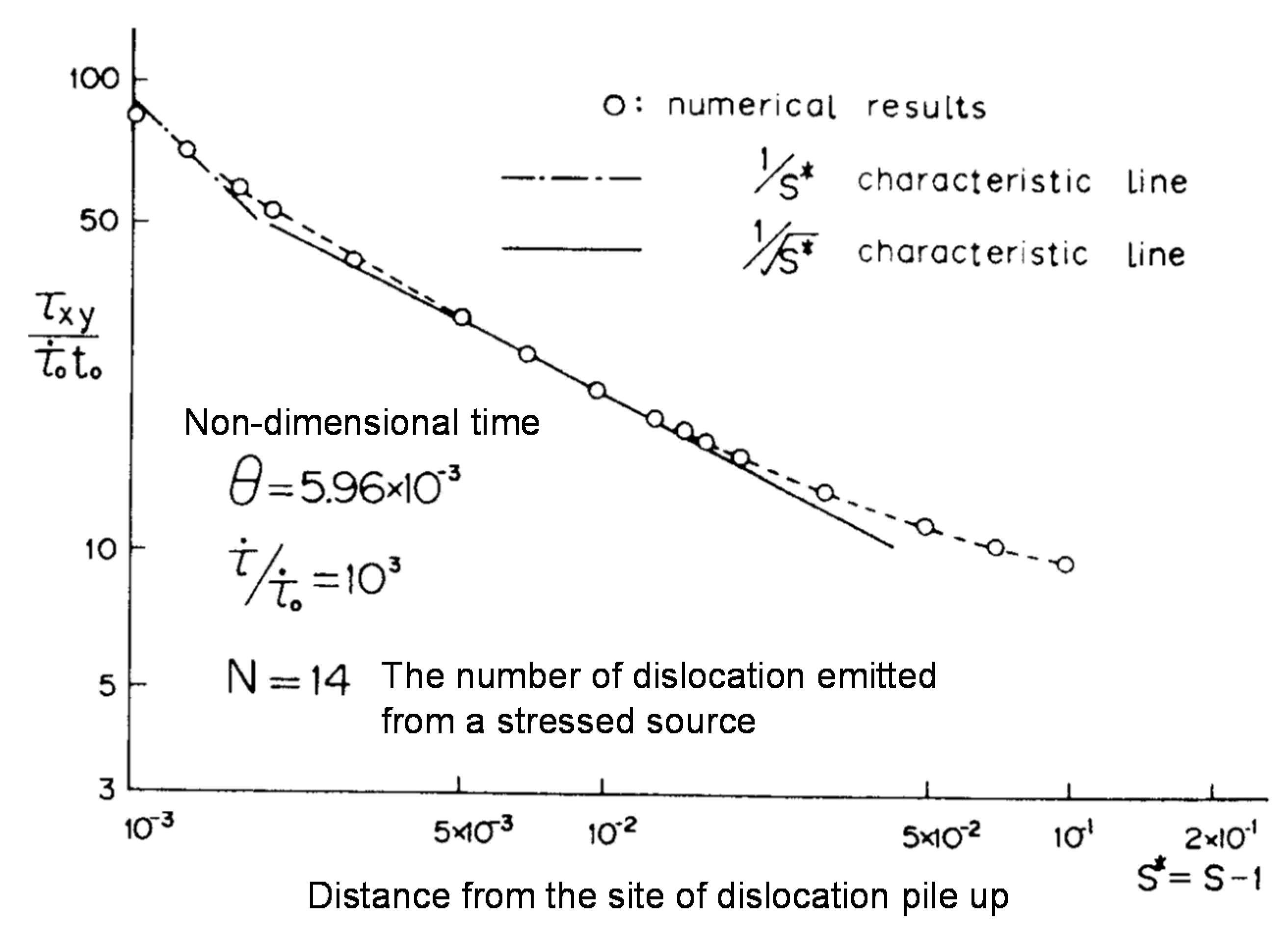
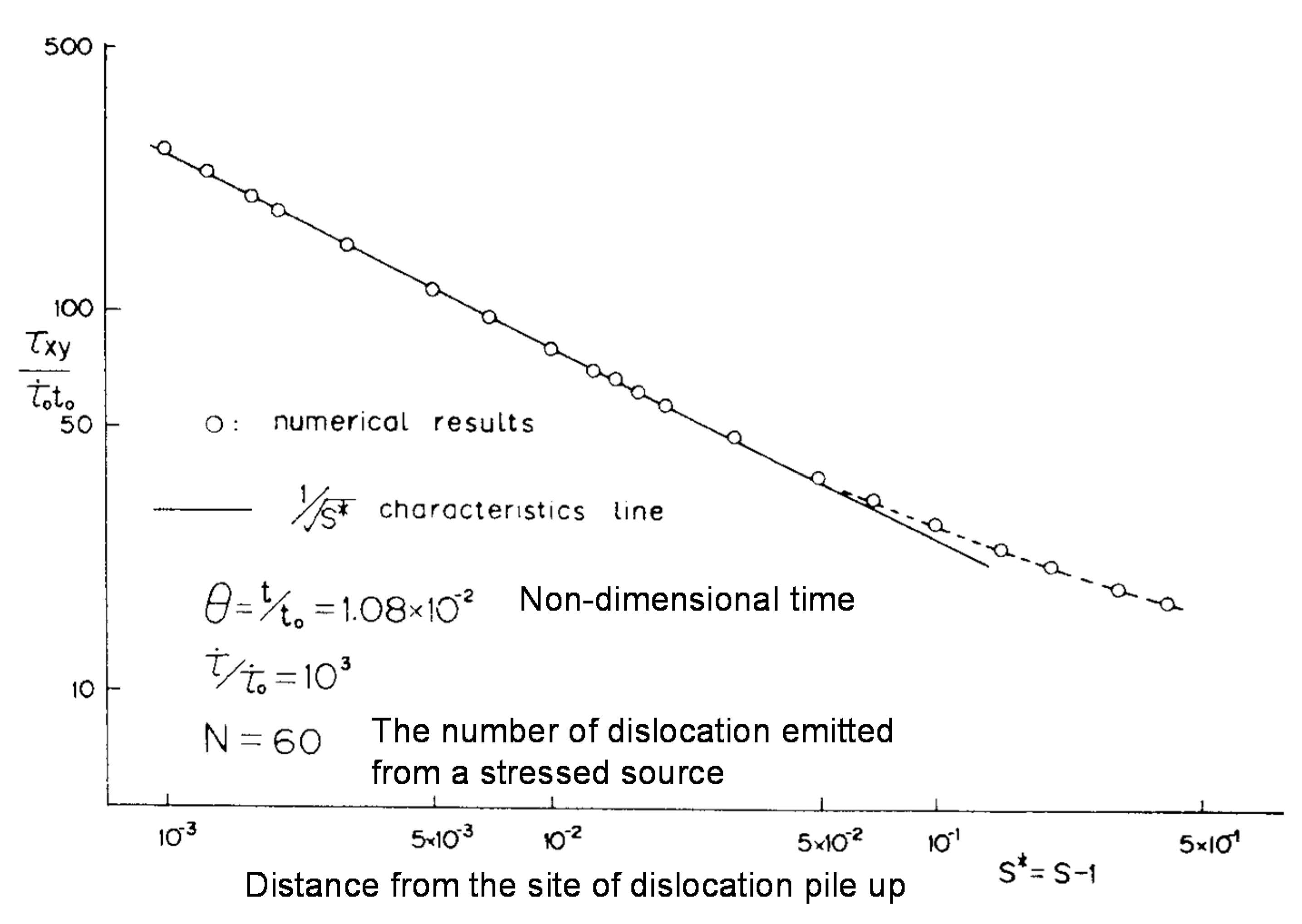
2.3.2. Results [2,3]
2.4. Application to Problem of Yielding
2.4.1. Basic Equations
2.4.2. The Application of This Theory to Yielding of Steels
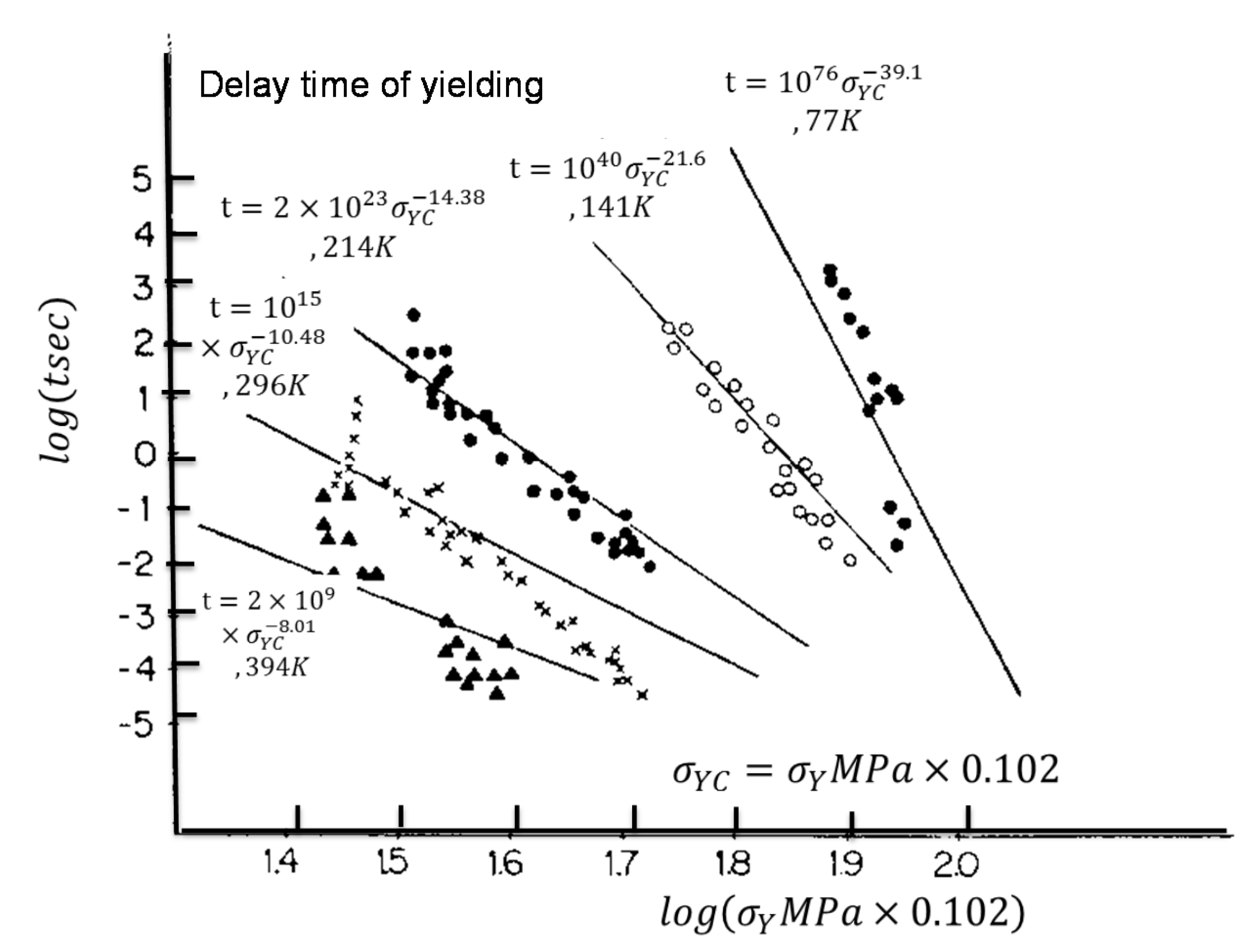
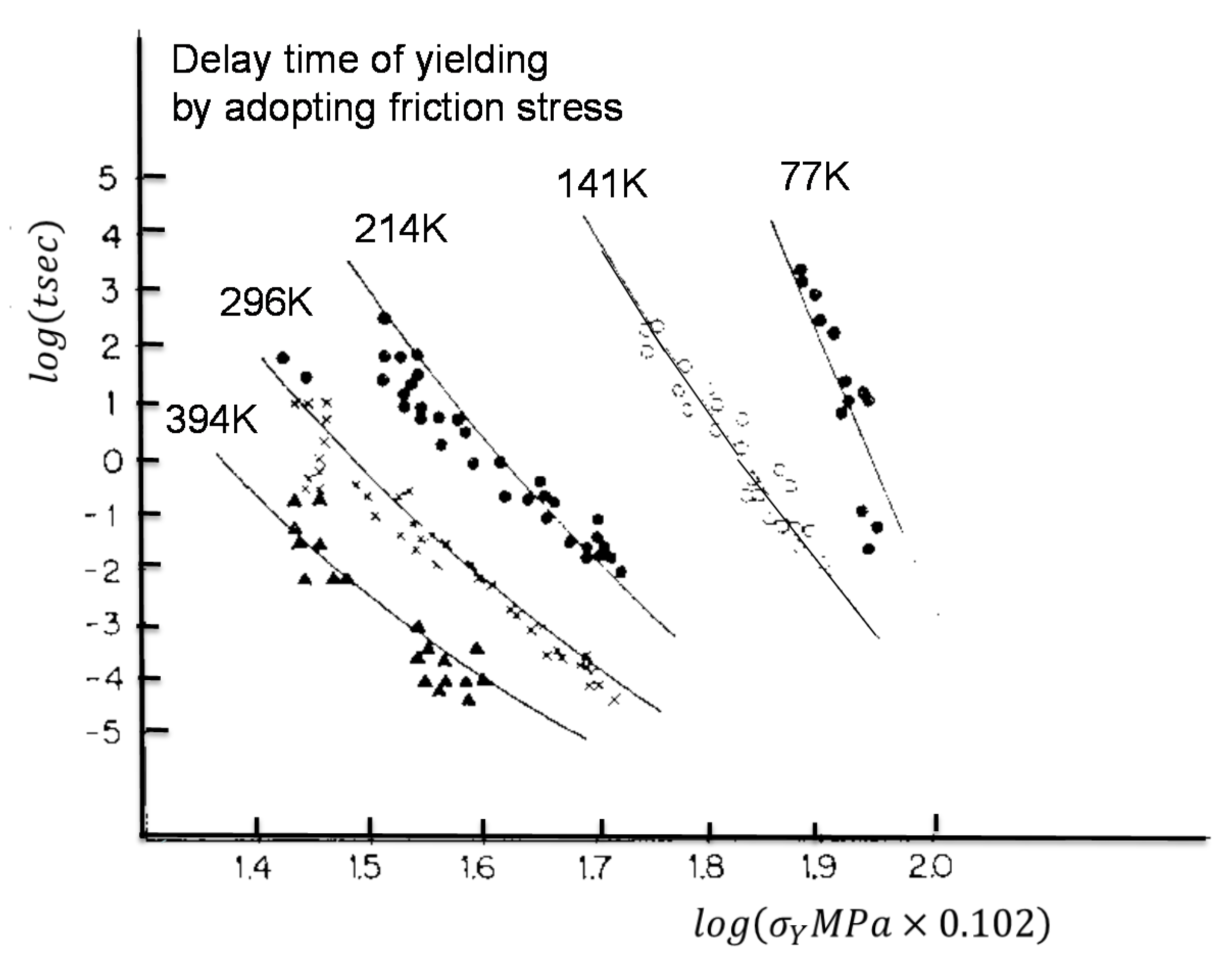
The Delay Time of Yielding
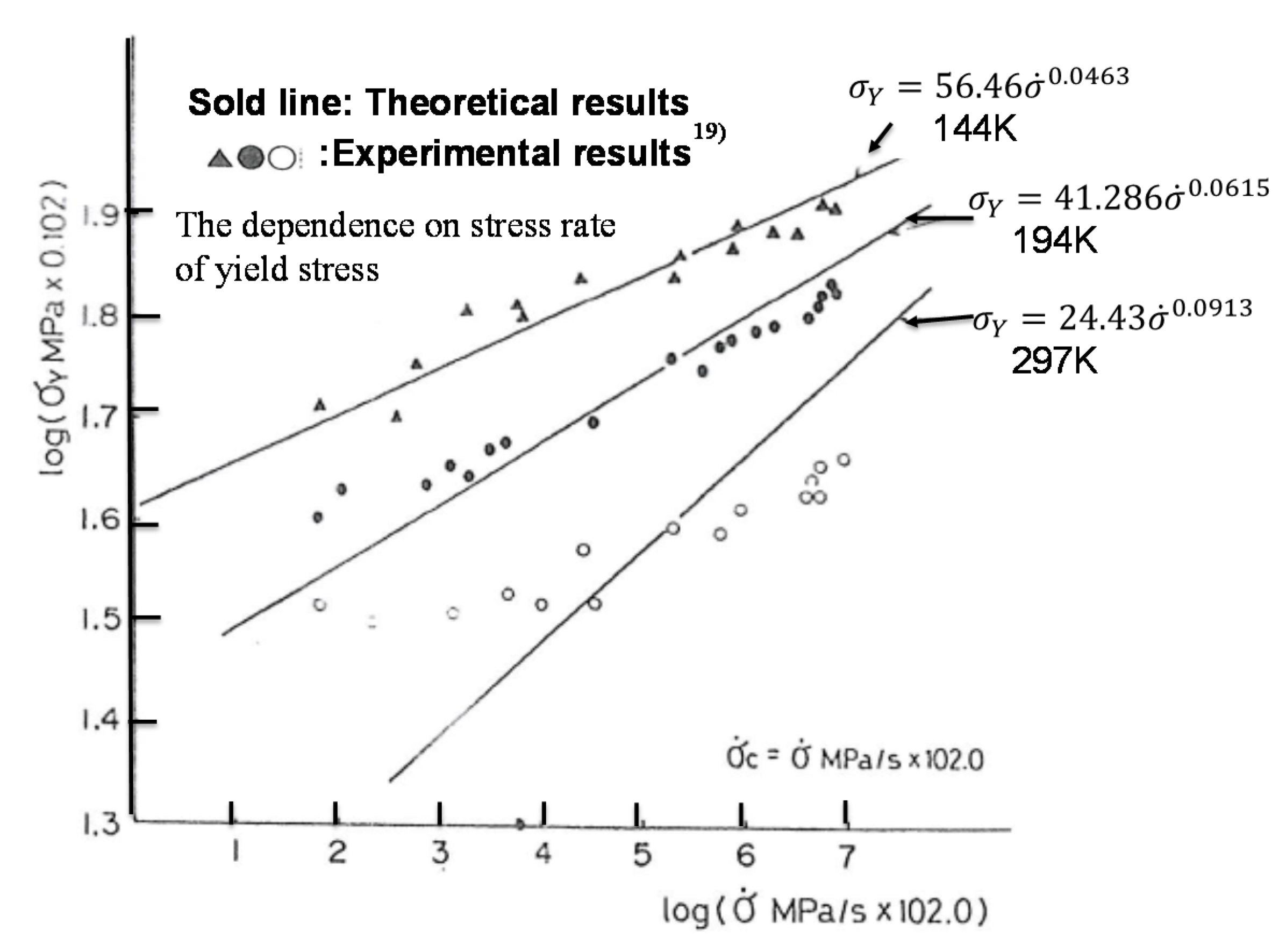
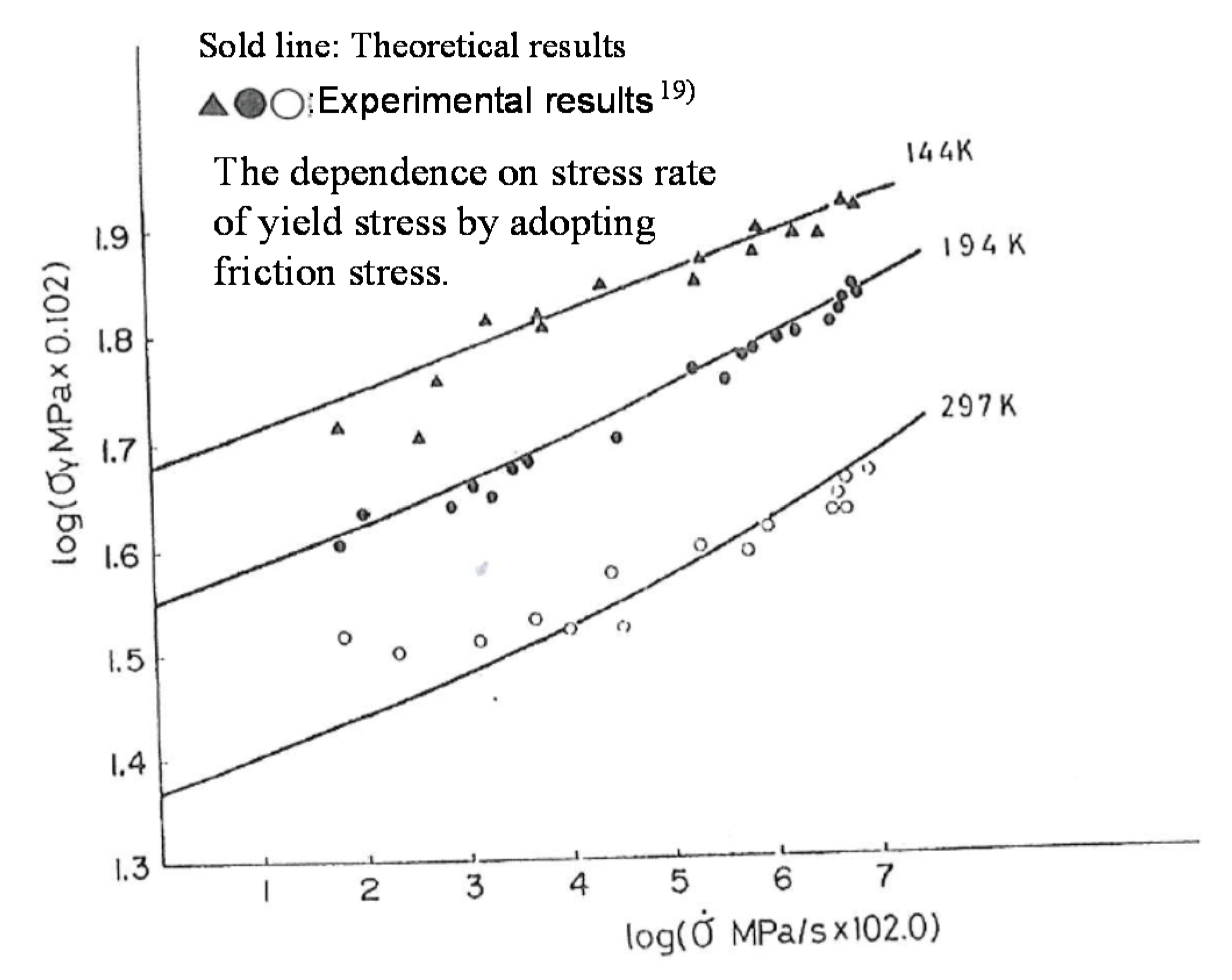
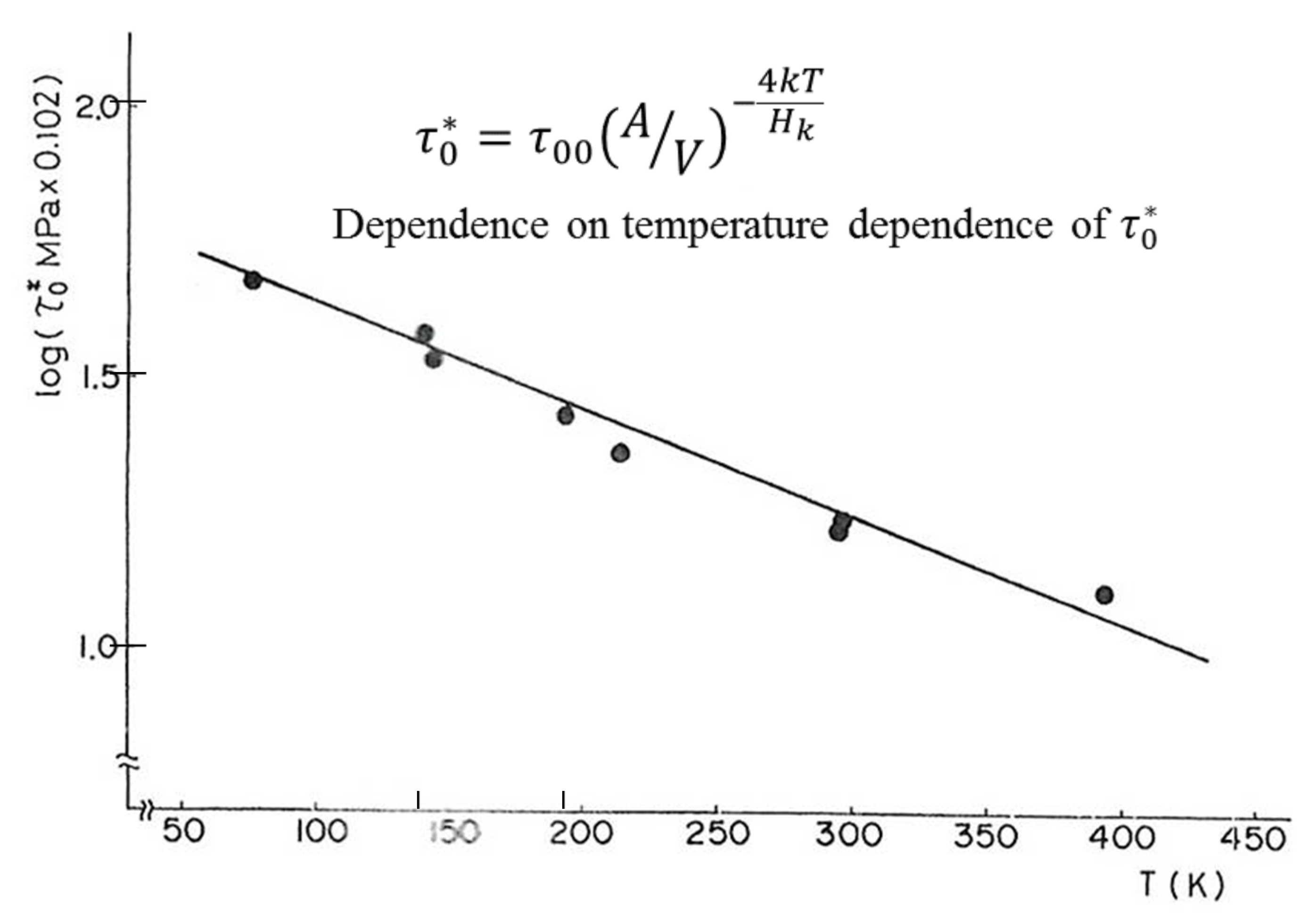
The Applied Stress Rate Dependence of Yield Stress [17]
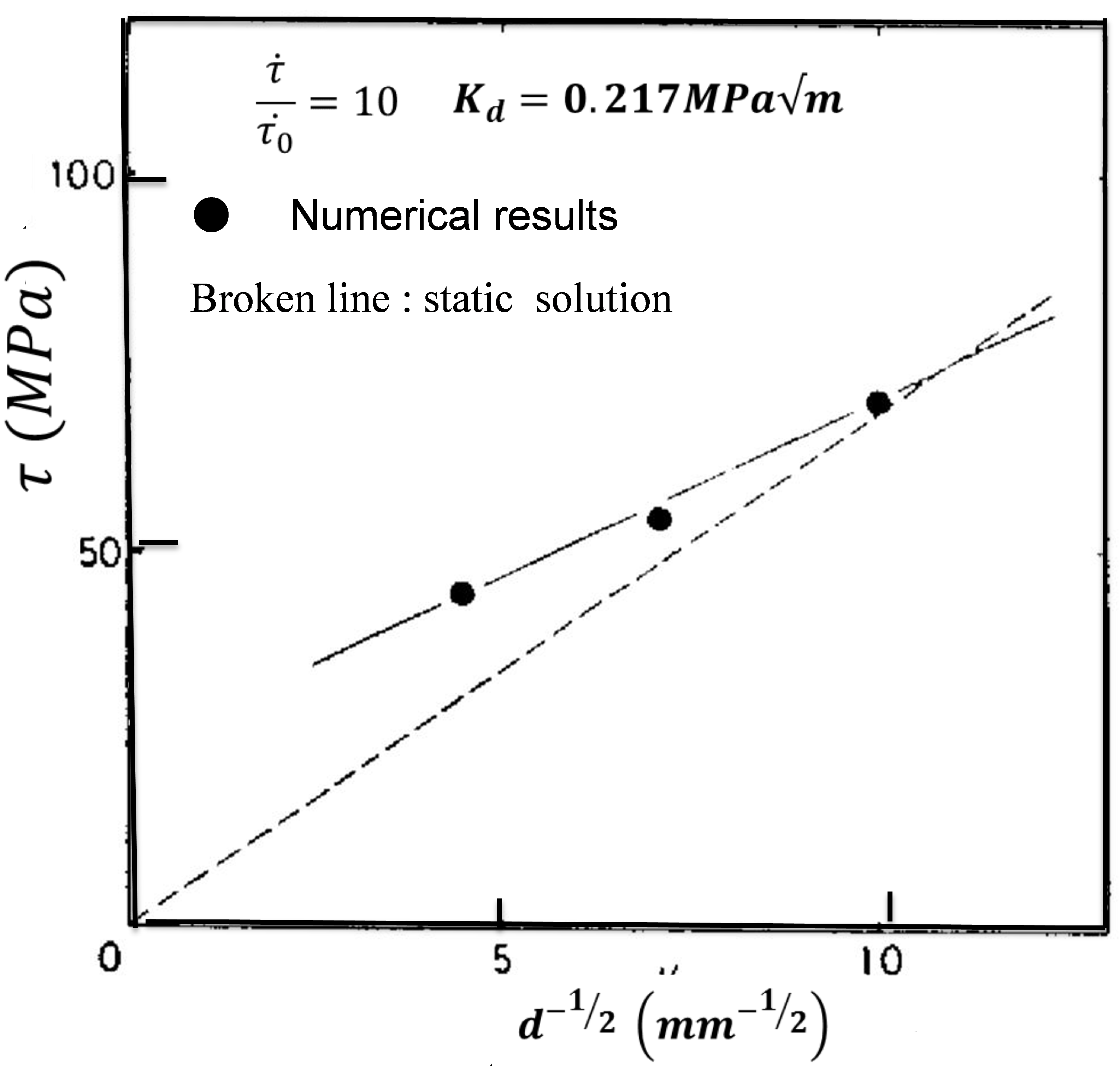
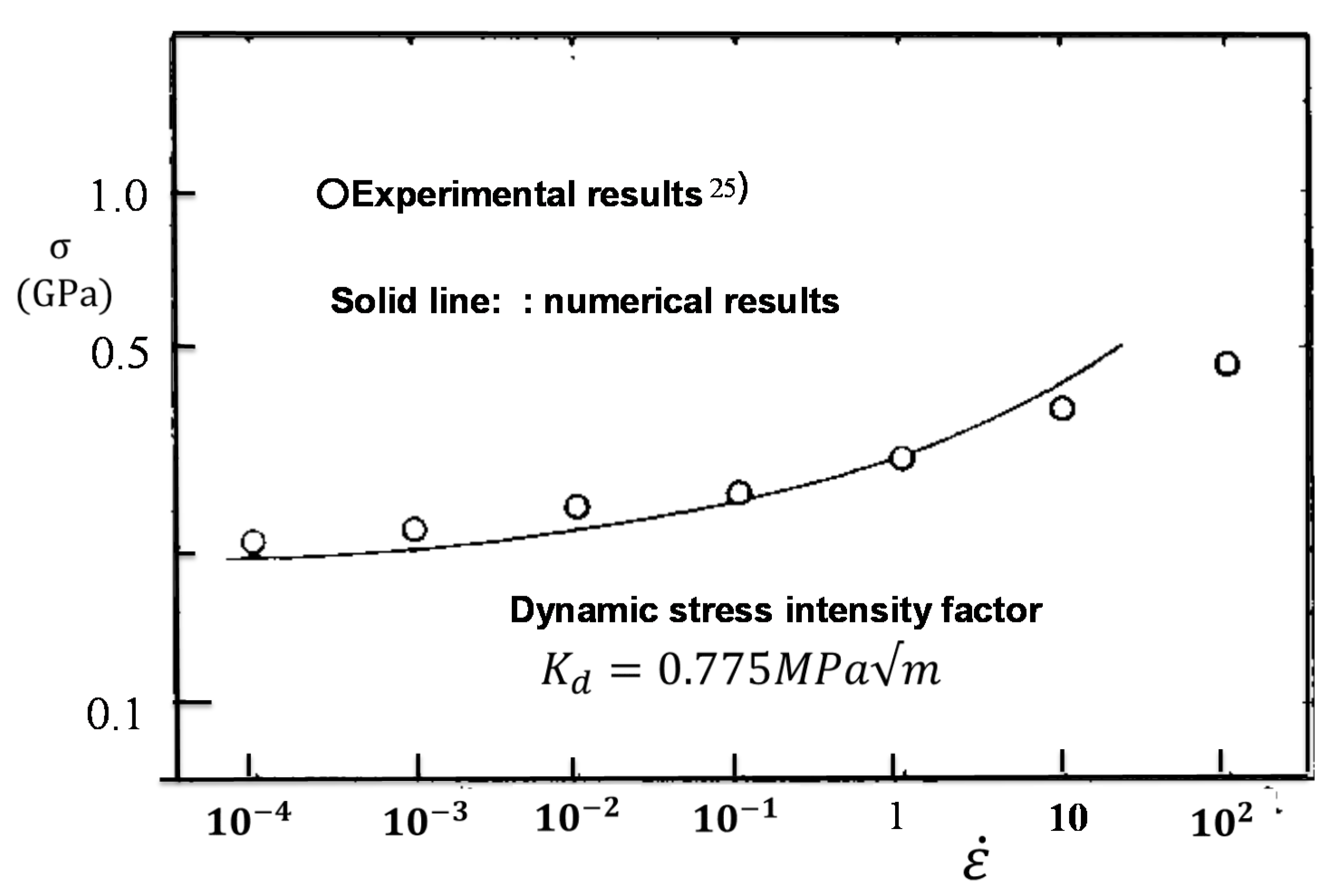
The Effect of Grain Size and Applied Strain Rate on Yield Stress Based on the Theory of Dislocation Piling Up [2,3,21]
2.5. Application to Problem of Creep
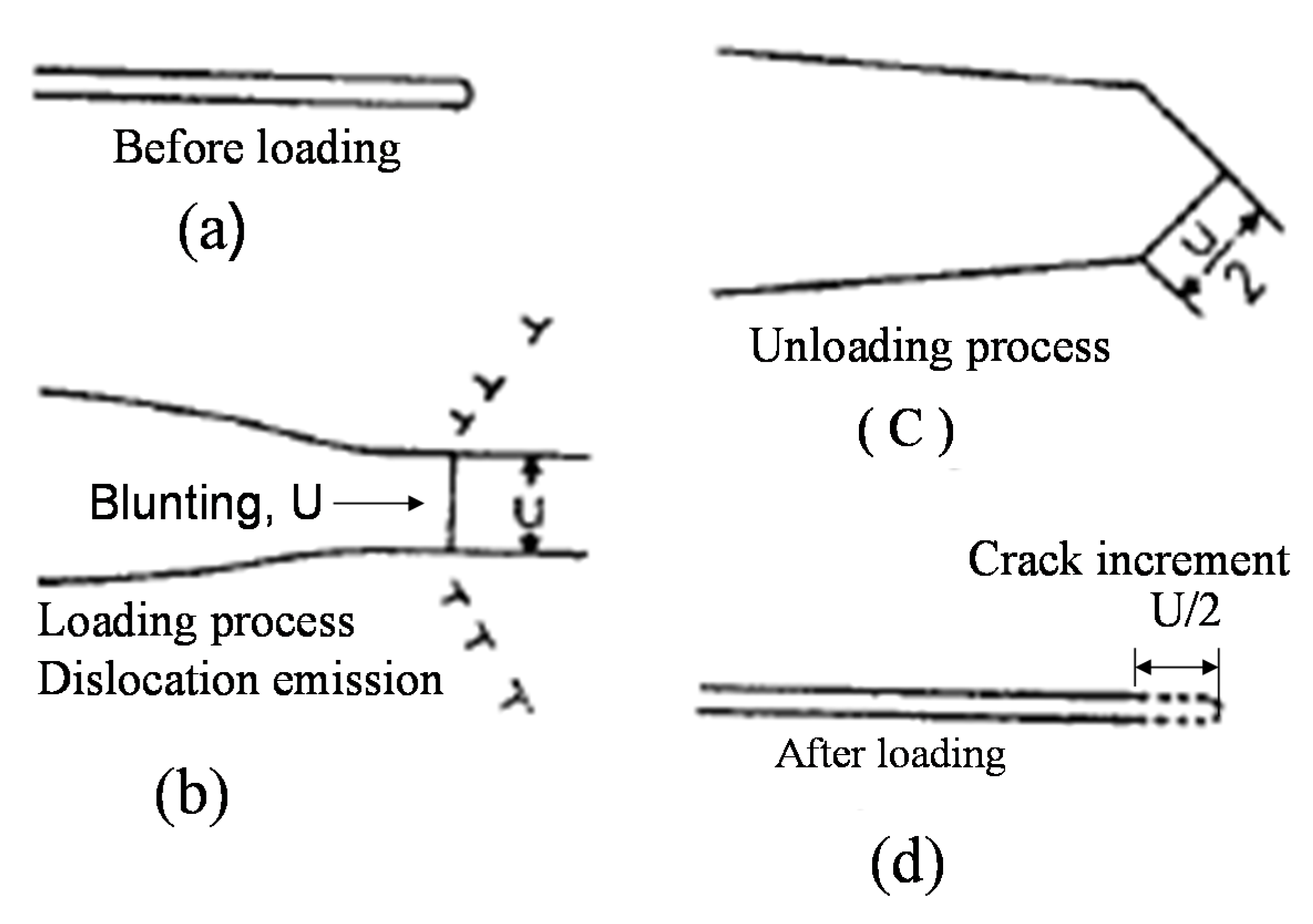
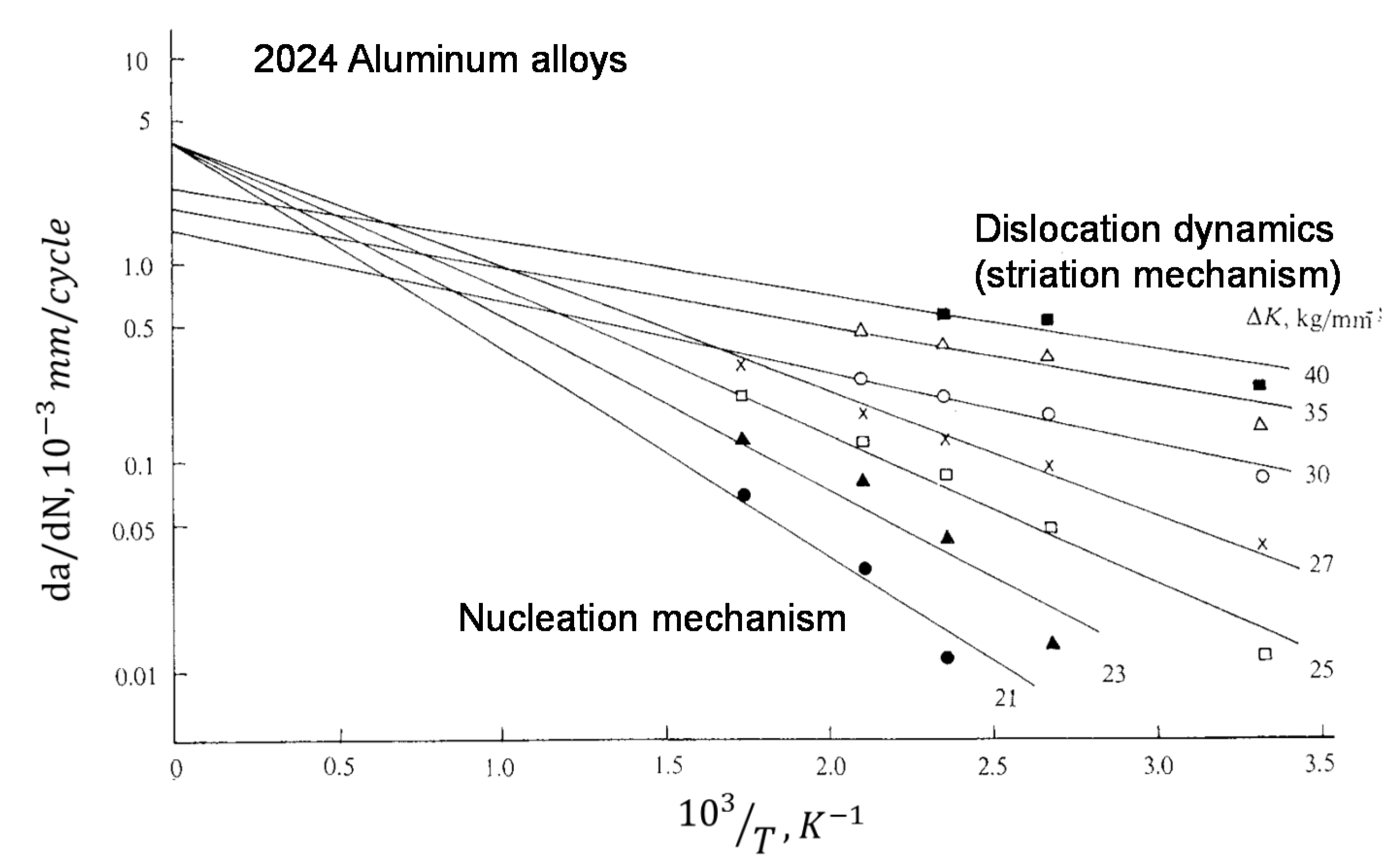
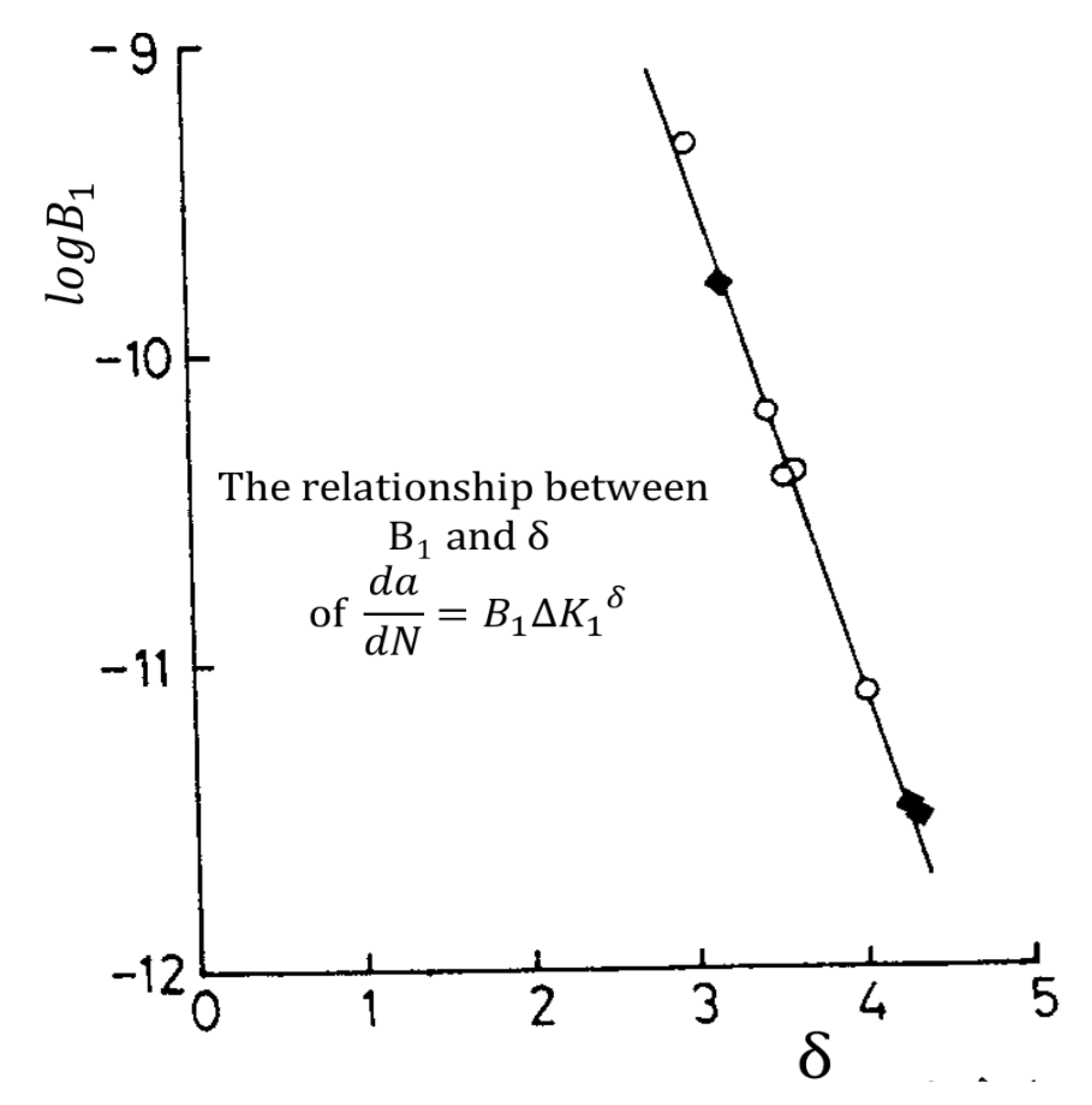
2.6. Application to the Problem of Fatigue Crack Growth [32,33]
3. Concluding Remarks and Future Problem
Funding
Acknowledgments
Conflicts of Interest
References
- Zhou, C.; Biner, S.B.; LeSar, R. Discrete dislocation dynamics simulation of plasticity at small scales. Acta Metall. 2010, 58, 1565–1577. [Google Scholar] [CrossRef]
- Yokobori, T.; Yokobori, A.T., Jr. Physical and Phenomenological Model with Non-Linearity in Ductile fracture and fatigue crack growth. In Physical Non-Linearity’s in Structural Analysis, Proceedings of the IUTAM Symposium, Senlis, France, 27–30 May 1980; Hult, J., Lemaitre, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1980; pp. 271–286. [Google Scholar]
- Yokobori, A.T., Jr.; Yokobori, T.; Nishi, H. Stress Rate and Grain Size Dependence of Dynamic Stress Intensity Factor by Dynamical Piling-up of Dislocations Emitted. In Proceedings of the IUTAM Symposium on MMMHVDF, Tokyo, Japan, 12–15 August 1985; Kawata, K., Shioiri, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1987; pp. 149–164. [Google Scholar]
- Suh, N.P.; Lee, R.S. A dislocation model for the delayed yielding phenomenon. Mater. Sci. Eng. 1972, 10, 269–278. [Google Scholar] [CrossRef]
- Zubelewicz, A. Review Mechanical-based transitional viscoplasticity. Crystals 1972, 10, 212. [Google Scholar] [CrossRef] [Green Version]
- Yokobori, A.T., Jr.; Yokobori, T.; Kawasaki, T. Computer simulation of dislocation groups dynamics under applied constant stress and its application to yield problems of mild steel. In High Velocity Deformation of Solid; IUTAM Symposium; Kawata, K., Shioiri, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1979; pp. 132–148. [Google Scholar]
- Cottrell, A.H.; Bilby, B.A. Dislocation theory of yielding and strain ageing of iron. Proc. Phys. Soc. Lond. A 1949, 62, 49–62. [Google Scholar] [CrossRef]
- Yokobori, T. Delayed yield and strain rate and temperature dependence of yield point in Iron. J. Appl. Phys. 1954, 25, 593–594. [Google Scholar] [CrossRef]
- Yokobori, T.; Yokobori, A.T., Jr.; Kamei, A. Computer simulation of dislocation emission from a stressed source. Philos. Mag. 1974, 30, 367–378. [Google Scholar] [CrossRef]
- Yokobori, A.T., Jr.; Yokobori, T.; Kamei, A. Generalization of computer simulation of dislocation emission under constant rate of stress application. J. Appl. Phys. 1975, 46, 3720–3724. [Google Scholar] [CrossRef]
- Kanninen, M.F.; Rosenfield, A.R. Dynamics of dislocation pile-up formation. Philos. Mag. 1969, 20, 569–587. [Google Scholar] [CrossRef]
- Rosenfield, A.R.; Hahn, G.T. Linear arrays of moving dislocations emitted by a source. In Dislocation Dynamics; Rosenfield, A.R., Hahn, G.T., Eds.; Mcgraw-Hill: New York, NY, USA, 1968; pp. 255–273. [Google Scholar]
- Turner, A.P.L.; Vreeland, T. The effect of stress and temperature on the velocity of dislocations in pure iron mono crystals. Acta Metall. 1970, 18, 1225–1235. [Google Scholar] [CrossRef] [Green Version]
- Seeger, A. On the Theory of the Low-temperature Internal friction Peak Observed in Metals. Philos. Mag. 1956, 1, 651–662. [Google Scholar] [CrossRef]
- Johnston, W.G. Yield points and delay times in single crystals. J. Appl. Phys. 1962, 33, 2716. [Google Scholar] [CrossRef]
- Hahn, G.T. A model for yielding with special reference to the yield-point phenomenon of iron and related bcc metals. Acta Metall. 1962, 10, 727–738. [Google Scholar] [CrossRef]
- Yokobori, T., Jr.; Yokobori, T.; Sakata, H. Derivation of Plastic Strain Rate Formula Based on Dislocation Groups Dynamics and Its Application to Yield Problems. Jpn. Soc. Mech. Eng. 1984, 50, 654–660. (In Japanese) [Google Scholar] [CrossRef]
- Stein, D.F.; Low, J.R., Jr. Mobility of edge dislocation in silicon-iron crystals. J. Appl. Phys. 1960, 31, 362. [Google Scholar] [CrossRef]
- Hendrickson, J.A.; Wood, D.S.; Clark, D.S. Prediction of transition in a notched bar impact test. Trans. Am. Soc. Met. 1959, 51, 629. [Google Scholar]
- Yokobori, T. Zairyo Kyoudogaku, 2nd ed.; Gihodo Pub.: Tokyo, Japan, 1955; Iwanami Pub.: Tokyo, Japan, 1974. [Google Scholar]
- Gerstle, F.P.; Dvorak, G.J. Dynamics formation and release of a dislocation pile-up against a viscous obstacle. Philos. Mag. 1974, 29, 1337–1346. [Google Scholar] [CrossRef]
- Sylwestrowicz, W.; Hall, E.O. The deformation and ageing of mild steel. Proc. R. Soc. Lond. B 1951, 64, 405–502. [Google Scholar] [CrossRef]
- Petch, N.J. The cleavage strength of poly-crystals. J. Iron Steel Inst. 1953, 174, 25–28. [Google Scholar]
- Armstrong, R.W. The (cleavage) strength of pre-cracked polycrystals. Eng. Fract. Mech. 1987, 28, 529–538. [Google Scholar] [CrossRef]
- Armstrong, R.W. Material grain size and crack size influences on cleavage fracturing. Philos. Trans. R. Soc. A 2015, 373, 20140124. [Google Scholar] [CrossRef]
- Cambell, J.D.; Harding, J. Response of Metals to High Velocity Deformation; Inderscience Publishers: New York, NY, USA, 1961; p. 51. [Google Scholar]
- Manjoine, M.J. Influence of rate of strain and Temperature on yield stress of Mild SteelTrans. J. Appl. Mech. Trans. ASME 1944, 66, A-211. [Google Scholar]
- Zerilli, F.J.; Armstrong, R.W. Dislocation mechanics based constitutive relations for material dynamics calculations. J. Appl. Phys. 1987, 61, 1816–1825. [Google Scholar] [CrossRef] [Green Version]
- Armstrong, R.W. Takeo Yokobori and Micro-to Macro-Fracturing of poly-crystals. Strengh Fract. Complex. Int. J. 2020, 12, 79–88. [Google Scholar] [CrossRef]
- Weertman, J. Steady-state creep through dislocation climb. J. Appl. Phys. 1957, 28, 362. [Google Scholar] [CrossRef]
- Gilman, J.J. Plastic Anisotropy of Zinc Monocrystals. J. Met. 1956, 8, 1326–1336. [Google Scholar] [CrossRef]
- Yokobori, T.; Yokobori, A.T., Jr.; Kamei, A. Dislocation dynamics theory for fatigue crack growth. Int. J. Fract. 1975, 11, 781–788. [Google Scholar] [CrossRef]
- Yokobori, T.; Konosu, S.; Yokobori, A.T., Jr. Micro and Macro Fracture Mechanics Approach to Brittle Fracture and fatigue crack Growth. Fracture 1977, 1, 665–682. [Google Scholar]
- Laird, C.; Smith, G.C. Crack propagation in high stress fatigue. Philos. Mag. 1962, 7, 847–857. [Google Scholar] [CrossRef]
- Paris, P. Fatigue: An interdisciplinary approach. In Proceedings of the 10th Sagamore Army Materials Research Conference, Sagamore Conference Center, Raquette Lake, NY, USA, 13–16 August 1963; Burk, J.J., Reed, N.L., Eds.; Syracuse University Press: Syracuse, NY, USA, 1964; p. 107. [Google Scholar]
- Yokobori, T.; Aizawa, T. The Influence of Temperature and fatigue Crack Propagation rate of Aluminum Alloy. Int. J. Fracture 1973, 9, 489–491. [Google Scholar]
- Yokobori, T. A Kinetic Approach to Fatigue Crack Propagation. In Physics of Strength and Plasticity; The Orowan Anniversary Volume; Argon, A.S., Ed.; MIT Press: Cambridge, MA, USA, 1969; pp. 327–338. [Google Scholar]
- Yokobori, T.; Aizawa, T. The influence of temperature and stress intensity factor upon the fatigue crack propagation rate and striation spacing of 304 stainless steel. J. Jpn. Inst. Met. 1975, 39, 1003–1010. (In Japanese) [Google Scholar] [CrossRef] [Green Version]
- Kawasaki, T.; Nakanishi, S.; Sawaki, Y.; Hatanaka, K.; Yokobori, T. Fracture Toughness and Fatigue Crack Propagation in High Strength Steel at Low Temperature. Jpn. Soc. Mech. Eng. 1975, 41, 3324–3331. (In Japanese) [Google Scholar]
- Yokobori, T.; Sato, K. The Effect of Frequency on fatigue Crack Propagation Rate and Striation Spacing in 2024-T3 Aluminum Alloy and SM-50 Steel. Eng. Fract. Mech. 1976, 8, 81–88. [Google Scholar]
- Hartman, A.; Schijve, J. The effect of environment and load frequency on the crack propagation law for macro fatigue crack growth in Aluminum alloys. Eng. Fract. Mech. 1970, 1, 615–631. [Google Scholar] [CrossRef]
- Rice, J.R. Stress due to a Sharp Notch in a Work-Hardening elastic-Plastic Material Loaded by Longitudinal shear. J. Appl. Mech. 1987, 34, 287–298. [Google Scholar] [CrossRef]
- Yokobori, T. A Critical evaluation of mathematical equations for fatigue crack growth with special reference to ferritic grain size and monotonic yield strength dependence. In Fatigue Mechanisms; Fong, J., Ed.; ASTMSTP: West Conshohocken, PA, USA; Volume 675, pp. 683–706.


























© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yokobori, A.T., Jr. Holistic Approach on the Research of Yielding, Creep and Fatigue Crack Growth Rate of Metals Based on Simplified Model of Dislocation Group Dynamics. Metals 2020, 10, 1048. https://doi.org/10.3390/met10081048
Yokobori AT Jr. Holistic Approach on the Research of Yielding, Creep and Fatigue Crack Growth Rate of Metals Based on Simplified Model of Dislocation Group Dynamics. Metals. 2020; 10(8):1048. https://doi.org/10.3390/met10081048
Chicago/Turabian StyleYokobori, A. Toshimitsu, Jr. 2020. "Holistic Approach on the Research of Yielding, Creep and Fatigue Crack Growth Rate of Metals Based on Simplified Model of Dislocation Group Dynamics" Metals 10, no. 8: 1048. https://doi.org/10.3390/met10081048