1. Introduction
Hydrostatic bearings have a number of advantages, such as high loading capacity, stiffness, and low frictional wear, which makes them ideal for heavy and precision mechanical equipment [
1]. Thus, hydrostatic bearings are used widely in the spindles of machine tools such as high-precision lathes and grinding machines; optimizing the design of hydrostatic bearings is an important way to improve the performance of machine tools [
2,
3]. During the rotating process, the bearing surface and the spindle surface are kept apart by an oil film that is typically around 10 μm thick, similar to the fluctuations of the traditional bearing surface topography. As such, the bearing surface topography must be taken into account when discussing the static and dynamic performance of hydrostatic bearings.
Several studies have been conducted in recent decades to investigate the impact of bearing surface topography on the performance of hydrostatic and aerostatic bearings. Song et al. [
4] discussed the performance of gas bearings with spiral grooves on the surface, and found that the spiral groove improved the load capacity of bearings. Applying a numerical method, Feng et al. [
5] investigated the dynamics of a bearing–rotor system considering grooves of the bearing surface, and discovered that some kinds of grooves could improve the stability of the system. In addition to these studies on the surface grooves of bearings, there have been many statistical investigations on the structures of bearing surfaces. Christensen [
6] proposed a statistical model based on Gaussian distribution to characterize the surface topography of bearings, which was then used by Lin [
7] to examine the influence of surface topography on the stiffness and damping characteristics of hydrostatic thrust bearings. The results showed that the bearing surface topography had a significant impact on the stiffness and damping coefficients, and that ignoring it could result in significant errors in the dynamic characteristics of bearings. Walicka et al. [
8,
9,
10] investigated the effect of surface topography on the static characteristics of hydrostatic thrust bearings lubricated with different types of fluids. Lin [
11,
12,
13] developed Hopf bifurcating theory and short bearing approximation, and examined the influence of different surface topography structures on the non-linear stability of hydrodynamic bearings, finding that they had a significant impact on the size of upper and lower limit circles of bearings. Naduvinamani et al. [
14,
15,
16,
17] studied the effect of surface topography on the performance of various sliding support systems, such as bearing rotor systems, annular recess thrust bearings, rectangular recess thrust bearings, and curved circular plates. Jurczak et al. [
18] demonstrated the impact of surface topography on the performance of sliding support systems lubricated with Ellis fluid. Zhang et al. [
19] optimized the oil film morphology of slide bearings by taking into account the surface topography. Lin et al. [
20] investigated the impact of bearing surface topography on the dynamic characteristics of slider bearings lubricated with non-Newtonian fluids. Pang et al. [
21] considered the influencing factor of surface topography when analyzing the running noise of bearings. Tian et al. [
22] discussed the influence of surface topography on the dynamic characteristics of long journal bearings. Pei et al. [
23] determined the influence of surface topography on the characteristics of floating ring bearings and illustrated that the effect of surface topography cannot be ignored.
In the aforementioned studies, it is evident that the surface topography significantly affects the static and dynamic characteristics of hydrostatic and hydrodynamic bearings, and hence cannot be overlooked when discussing bearing performance. However, the surface topographies analyzed in previous studies were typically assumed to follow a Gaussian distribution. In reality, bearing surfaces are typically processed by turning and grinding, and the distribution characteristics of surface topography are found to deviate significantly from the Gaussian distribution, as reported by Peklenik [
24] and Li [
25] et al. Taking into account the non-Gaussian nature of surface roughness, Tian et al. [
26] investigated the threshold speed of short bearings and found that the effect of non-Gaussian surface roughness could not be disregarded. Winkler et al. [
27] proposed a numerical model to discuss the abrasion of non-Gaussian surfaces. Ma et al. [
28] discussed misaligned hydrodynamic bearings with non-Gaussian surface topography; the results illustrated that there would be obvious errors if the non-Gaussianity of the bearing surface was ignored. Applying the mixed elastohydrodynamic theory, Pei et al. [
29] studied the influence of non-Gaussian surface topography on the film thickness of line contact, and established the relationship between the minimum film thickness and non-Gaussian parameters of the surface. Chen et al. [
30] examined the dynamic contact performance of non-Gaussian surfaces through fractal theory. Ren et al. [
31] investigated the contact performance of non-Gaussian surfaces in engineering applications, and discovered that the contact performance of surfaces was significantly affected by the non-Gaussian parameters. Zhao et al. [
32] analyzed the effects of non-Gaussian surface topography on the wear of surfaces in mixed lubrication.
After examining the studies mentioned above, it has been noticed that these investigations predominantly concentrate on the contact performance of surfaces, with little discussion regarding the static performance of hydrostatic thrust bearings when considering non-Gaussian surface topography. When it comes to bearing surfaces processed through turning and grinding, significant deviations from the Gaussian distribution have been observed in the distribution characteristics of surface topography. Therefore, to conduct a more precise analysis of the static characteristics of hydrostatic thrust bearings, it is essential to consider the non-Gaussian nature of the bearing surface topography during the analytical process.
2. Fundamentals and Methods
The Christensen statistical model [
6] was applied in this study to illustrate the surface topography. Using this statistical model, there are two kinds of surface topographies for hydrostatic bearings: radial and circumferential topography. For radial topography, the surface texture of the bearing is distributed along the radial direction of the bearing, as shown in
Figure 1. For a specified bearing radius, the corresponding region on the bearing surface is a circle. When the bearing surface statistical model is established along the circumferential direction, the circumferential topography is obtained. From the illustrations by Peklenik [
24] and Li et al. [
25], for bearing surfaces processed by turning and grinding, the distribution characteristics of surface topography significantly deviated from the Gaussian distribution. Thus, the non-Gaussian statistical model was applied in this study to describe the surface topography of bearings.
In
Figure 1, the structure of a hydrostatic thrust bearing is displayed;
R is the bearing radius,
r1 is the recess radius,
r0 is the radius of the supply hole,
Ps is the pressure of supply oil,
ω is the rotating speed of the journal, and
h0 and
βh0 are the thickness of oil film in the regions of bearing land and recess in smooth situations, respectively. Additionally, the actual thickness of oil film in the regions of bearing land and recess considering the surface topography could be expressed as follows:
where
hs =
δ1 +
δ2 is a random part of the oil film,
δ1 is the variance in the actual journal surface measured from the smooth surface, and
δ2 is the variance in the actual bearing surface measured from the smooth surface.
ξ is a random variable representing the surface topography of oil film.
Ignoring the body force of oil film and considering the axial symmetry of the bearing, the motion equations of oil film could be built in the coordinate system in
Figure 1 as follows:
where
ρ and
μ are the density and viscosity of the lubricant, respectively;
r and
z are coordinates in the radius direction and vertical direction, respectively; and
u and
v are the velocities of oil film on radius direction and circumferential direction. With the boundary conditions
, the velocity of oil film in the circumferential direction can be found through Equation (4):
Substituting Equation (6) into Equation (3), with the boundary condition
, the velocity of oil film in the radial direction can be obtained:
Integrating the expression of
u with respect to
z from 0 to
h, the expression of flow rate
Q could be found:
The following dimensionless substitution can be introduced:
and the dimensionless expression of flow rate
Q* is
Taking mathematical expectation of the dimensionless expression of flow rate
Q*:
where
q(
h*) expresses the expected value of
h*3. Considering the one-dimensional surface topography of the bearing,
q(
h*) is expressed as follows:
operator
E(*) expresses the expected value of variable (*), defined as:
where
f(
) is the probability density function of random variable
, which is used to display distribution characteristics of the bearing surface topography and could be expressed as:
where the probability density function,
g(
), is in a Gaussian distribution as follows:
where
c is the half-distribution region of the random variable
hs. The probability density function,
g(
hs), terminates at
c = ±3
σ, and
σ is the standard deviation of the random variable
hs. Additionally,
pn(
hs) is the Edgeworth expansion, which was applied to display the non-Gaussian roughness of the bearing surface with two parameters: skewness and kurtosis. Edgeworth expansion is a kind of Chebyshev–Hermite polynomial used to illustrate non-Gaussian distributions. Compared with other expansions, such as Gram–Charlier and Gaussian–Hermite, Edgeworth expansion contains one more Hermit polynomial, while the number of parameters is constant. Therefore, it can not only measure the fitting accuracy, but also has better convergence properties and higher fitting accuracy with more terms in an expansion. The Edgeworth expansion is typically adopted as [
25]:
where
k is the kurtosis of surface roughness distribution reflecting peakedness of the distribution, and
s is the skewness of surface roughness distribution reflecting asymmetry of the distribution with respect to the average value. For a Gaussion distribution, the values of kurtosis and skewness are
k = 3 and
s = 0, respectively. Additionally, the expressions of Hermite polynomials
Hei(
z) (i = 3, 4, 6) are [
33]:
Substituting Equation (17) into Equation (16), the Edgeworth expansion of the bearing surface topography could be written as:
Through Equations (12)–(15) and (18), the value of q(h*) in Equation (11) is obtained, which is determined by three characteristic parameters: c (the half-distribution region of the random variable hs), k (the kurtosis of surface roughness distribution), and s (the skewness of surface roughness distribution).
Then, the pressure distribution of oil film could be found by solving Equation (11):
where
C1 and
C2 are integration constants, the values of which could be calculated by applying boundary conditions of the pressure distribution
,
and
:
meanwhile, the expression of flow rate is deduced:
Integrating the expression of pressure distribution with respect to
r* from 0 to 1, the expression of loading capacity is obtained:
4. Results and Discussion
The influence of non-Gaussian surface roughness on the static performance of hydrostatic bearings is discussed in this study. Two kinds of surface roughness are discussed in this section: circumferential roughness and radial roughness. In
Figure 3 and
Figure 4, relationships between the non-Gaussian circumferential roughness and static performance of hydrostatic bearings are displayed. Additionally, the effects of the non-Gaussian radial roughness on the static performance of hydrostatic bearings are illustrated in
Figure 5 and
Figure 6. The structure and running parameters of the bearing are: recess radius
= 0.5, depth parameter of recess
β = 2, parameter of surface topography
c = 0.4, value range of kurtosis
k is 1~5, value range of skewness
s is −1.5~1.5, and inertial parameter
S = 0, 1, 2.
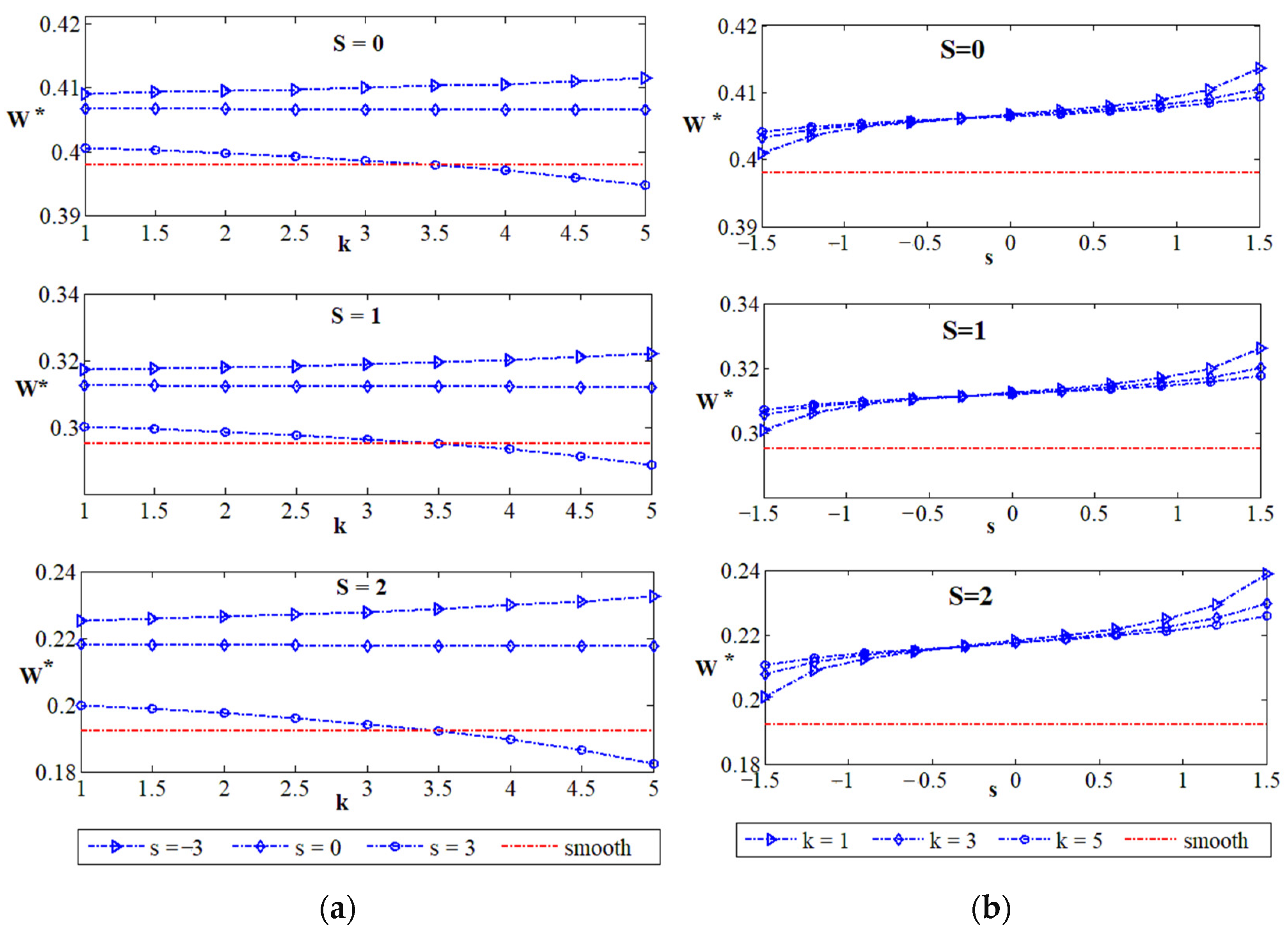
The influence of the non-Gaussian circumferential roughness on the load capacity of hydrostatic thrust bearings is displayed in
Figure 3. The relationship between the kurtosis of surface roughness and load capacity of the bearing is described in
Figure 3a. For a negative skewness, the relationship between the load capacity and kurtosis is a positive correlation, while the relationship changes to a negative correlation with positive skewness. Additionally, the influence of kurtosis on load capacity is negligible when the value of skewness is 0. When the value of kurtosis varies from 1 to 5, the inertial parameter
S = 0, the relative variations in load capacity are 0.61% (
s = −3), 0.05% (
s = 0), and −1.45% (
s = 3); when the inertial parameter
S = 1, the relative variations in load capacity are 1.54% (
s = −3), 0.16% (
s = 0), and −3.90% (
s = 3); when the inertial parameter
S = 2, the relative variations in load capacity are 3.24% (
s = −3), 0.32% (
s = 0), and −8.70% (
s = 3). The influence of kurtosis on load capacity is enhanced with the increase in inertial parameter
S. Compared with the situation of the Gaussian surface roughness model (i.e.,
k = 3,
s = 0), for the non-Gaussian parameters
k = 5 and
s = 3, when inertial parameter
S = 0, 1, 2, the calculation errors of load capacity between the results of Gaussian and non-Gaussian surface roughness are 2.90%, 7.56%, and 13.79%, respectively; for the non-Gaussian parameters
k = 5 and
s = −3, when inertial parameter
S = 0, 1, 2, the calculation errors of load capacity between the results of the Gaussian and non-Gaussian model are 1.23%, 3.50%, and 6.84%, respectively. The relationship between the skewness of non-Gaussian surface roughness and load capacity of the bearing is displayed in
Figure 3. The relationship between load capacity and kurtosis is a positive correlation, and the gradient of the variation curve decreases with the increase in kurtosis. At the region around
s = 0, the influence of kurtosis on the load capacity is negligible, which agrees with the results in
Figure 3a. When the value of skewness varies from −1.5 to 1.5, the inertial parameter
S = 0 and the relative variations in load capacity are 3.17% (
k = 1), 1.81% (
k = 3), and 1.26% (
k = 5); when the inertial parameter
S = 1, the relative variations of load capacity are 8.44% (
k = 1), 4.74% (
k = 3), 3.35% (
k = 5); when the inertial parameter
S = 2, the relative variations in load capacity are 18.89% (
k = 1), 10.54% (
k = 3), 7.32% (
k = 5). In other words, with the increase in inertial parameter
S, the influence of skewness on load capacity is enhanced. The reason the load carrying capacity of bearings is enhanced by the topology surface is as follows: when the lubricant flows through the topology surface, the rough surface of the bearing slows down the flow of lubricant, and the dented region of the bearing surface can store a portion of the energy from the flowing lubricant. This stored energy can support a portion of the load. Consequently, bearings with a topology surface have a higher load carrying capacity compared with smooth bearings.
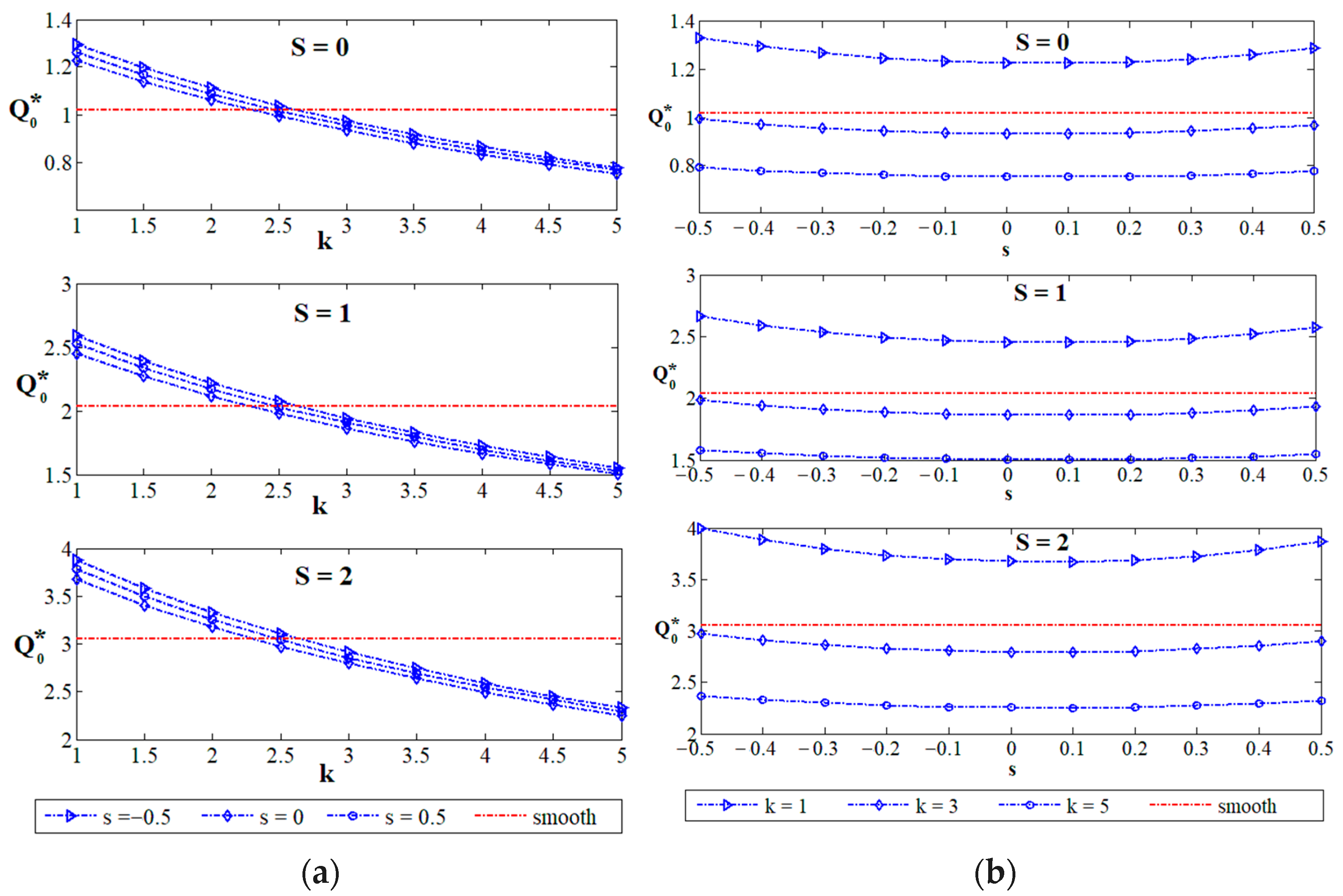
The influence of non-Gaussian circumferential roughness on the flow rate of hydrostatic thrust bearings is displayed in
Figure 4. The relationship between the kurtosis of surface roughness and flow rate of the bearing is described in
Figure 4a. It could be found that the relationship between flow rate and kurtosis is negative correlation obviously, and the gradient of the variation curve is decrescent with the increasing of kurtosis. Different from the situation of load capacity, the relative variations in flow rate are not affected by the varying of inertial parameter
S. During the value of kurtosis varying from 1 to 5, the relative variations in flow rate are −40.00% (
s = −0.5), −38.69% (
s = 0), −39.38% (
s = 0.5). Comparing with the results of Gaussian surface roughness model (i.e.,
k = 3,
s = 0): for the non-Gaussian parameters
k = 5 and
s = 0.5, the calculation error of flow rate between the results of the Gaussian and non-Gaussian models is 17.89%, while for the non-Gaussian parameters
k = 5 and
s = −0.5, the calculation error of flow rate between the results of Gaussian and non-Gaussian models is 16.60%. The relationship between the skewness of non-Gaussian surface roughness and flow rate of the bearing is described in
Figure 4b. With the increase in skewness, the value of the flow rate first decreased then increased, and reached the minimum at
s = 0. For a larger value of kurtosis, the amplitude of variation was smaller.
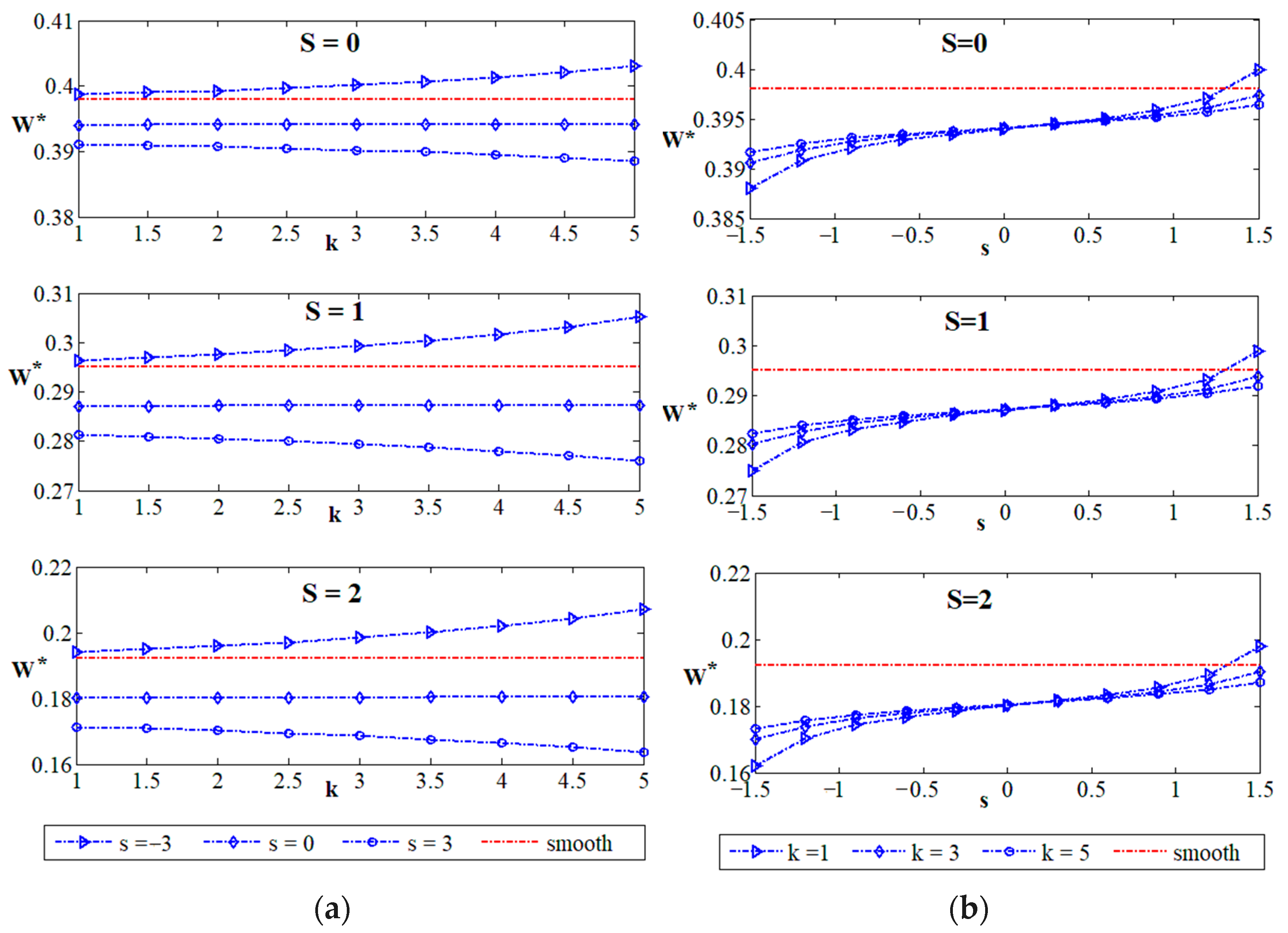
The influence of non-Gaussian radial roughness on the load capacity of hydrostatic thrust bearings is displayed in
Figure 5. The relationship between the kurtosis of non-Gaussian surface roughness and load capacity of the bearing is described in
Figure 5a. For negative skewness, the relationship between load capacity and kurtosis is a positive correlation, while the relationship changes to be negative correlation with a positive skewness. Additionally, the influence of kurtosis on load capacity is negligible when the value of skewness is 0. When the value of kurtosis varies from 1 to 5, the inertial parameter
S = 0, the relative variations in load capacity are 0.61% (
s = −3), 0.03% (
s = 0), and −0.66% (
s = 3); when the inertial parameter
S = 1, the relative variations in load capacity are 2.97% (
s = −3), 0.07% (
s = 0), and −1.88% (
s = 3); when the inertial parameter
S = 2, the relative variations in load capacity are 6.80% (
s = −3), 0.22% (
s = 0), and −4.61% (
s = 3). The influence of kurtosis on load capacity is enhanced with the increasing of inertial parameter
S. Compared with the situation of the Gaussian surface roughness model (i.e.,
k = 3,
s = 0): for the non-Gaussian parameters
k = 5,
s = 3, when inertial parameter
S = 0, 1, 2, the calculation errors of load capacity between the results of Gaussian and non-Gaussian models are 1.42%, 3.90%, and 9.32%, respectively; for the non-Gaussian parameters
k = 5 and
s = −3, when inertial parameter
S = 0, 1, 2, the calculation errors of load capacity between the results of Gaussian and non-Gaussian models are 2.28%, 6.27%, and 14.98%, respectively. The relationship between the skewness of non-Gaussian surface roughness and load capacity of the bearing is displayed in
Figure 5b. The relationship between load capacity and kurtosis is a positive correlation, and the gradient of the variation curve decreases with the increase in kurtosis. For the region around
s = 0, the influence of kurtosis on load capacity is negligible, which agrees with the results in
Figure 5a. When the value of skewness varies from −1.5 to 1.5, the inertial parameter
S = 0, the relative variations in load capacity are 3.07% (
k = 1), 1.74% (
k = 3), and 1.20% (
k = 5); when the inertial parameter
S = 1, the relative variations in load capacity are 8.69% (
k = 1), 4.85% (
k = 3), and 3.36% (
k = 5); when the inertial parameter
S = 2, the relative variations in load capacity are 22.02% (
k = 1), 11.95% (
k = 3), and 8.20% (
k = 5). In other words, with the increases in inertial parameter
S, the influence of skewness on load capacity is enhanced.
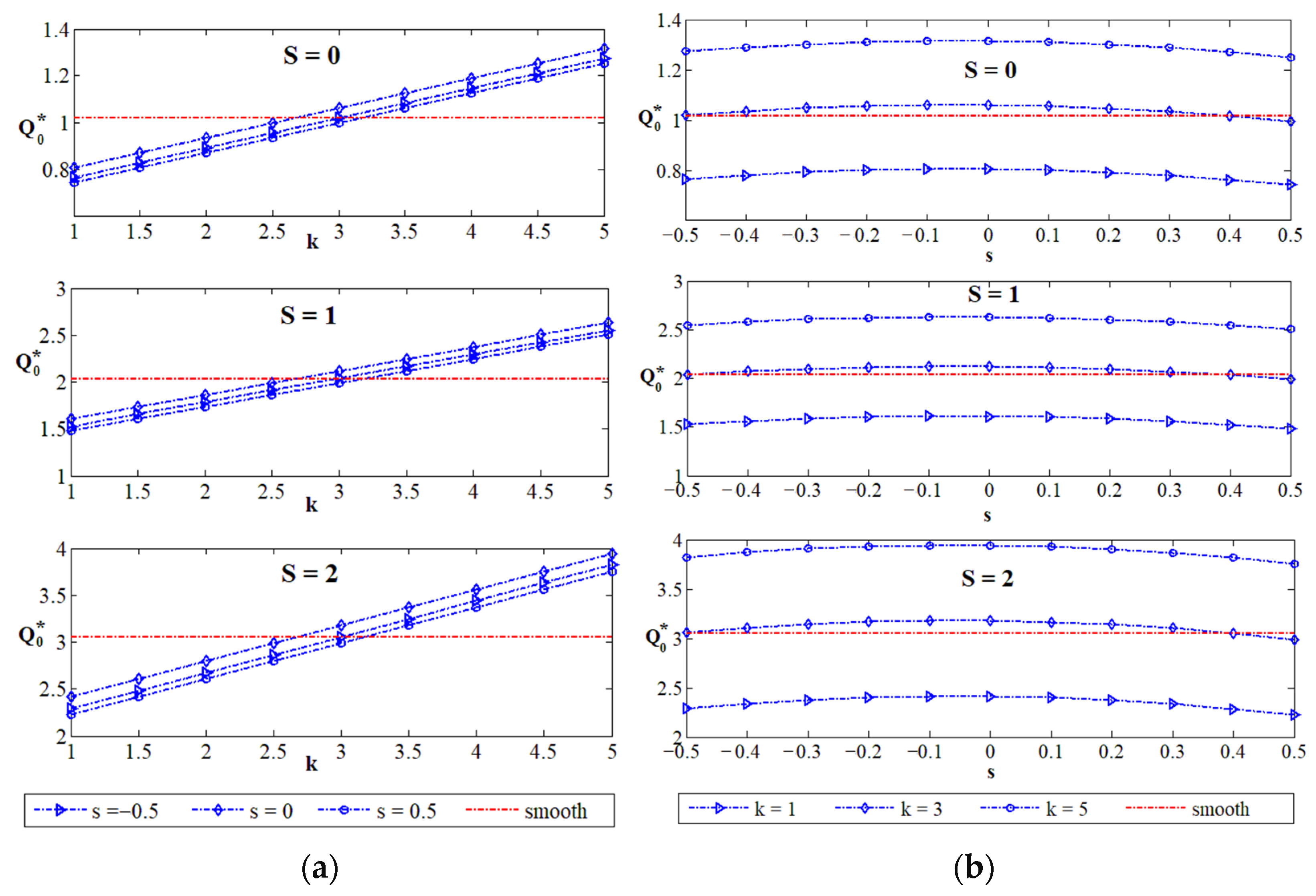
The influence of non-Gaussian radial roughness on the flow rate of hydrostatic thrust bearings is displayed in
Figure 6. The relationship between the kurtosis of non-Gaussian surface roughness and flow rate of the bearing is described in
Figure 6a. The relationship between the flow rate and kurtosis is clearly a positive correlation, and the gradient of the variation curve is nearly invariable with the increase in kurtosis. Different from the situation of load capacity, the relative variations in flow rate are not affected by varying the inertial parameter,
S. During the value of kurtosis varying from 1 to 5, the relative variations in flow rate are 66.70% (
s = −0.5), 63.71% (
s = 0), and 68.76% (
s = 0.5). Compared with the results of the Gaussian surface roughness model (i.e.,
k = 3,
s = 0), for the non-Gaussian parameters
k = 5 and
s = 0.5, the calculation error of flow rate between the results of Gaussian and non-Gaussian model is 18.06%, while for the non-Gaussian parameters
k = 5 and
s = −0.5, the calculation error of flow rate between the results of Gaussian and non-Gaussian model is 20.22%.The relationship between the skewness of non-Gaussian surface roughness and flow rate of the bearing is displayed in
Figure 6b. With the increase in skewness, the value of flow rate first increased then decreased, and reached the maximum at
s = 0.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





