
Development of Infrared-Guided Missile Precision Detection Simulator


Abstract
:1. Introduction
2. Device Design Based on Infrared Guided Missile Detection
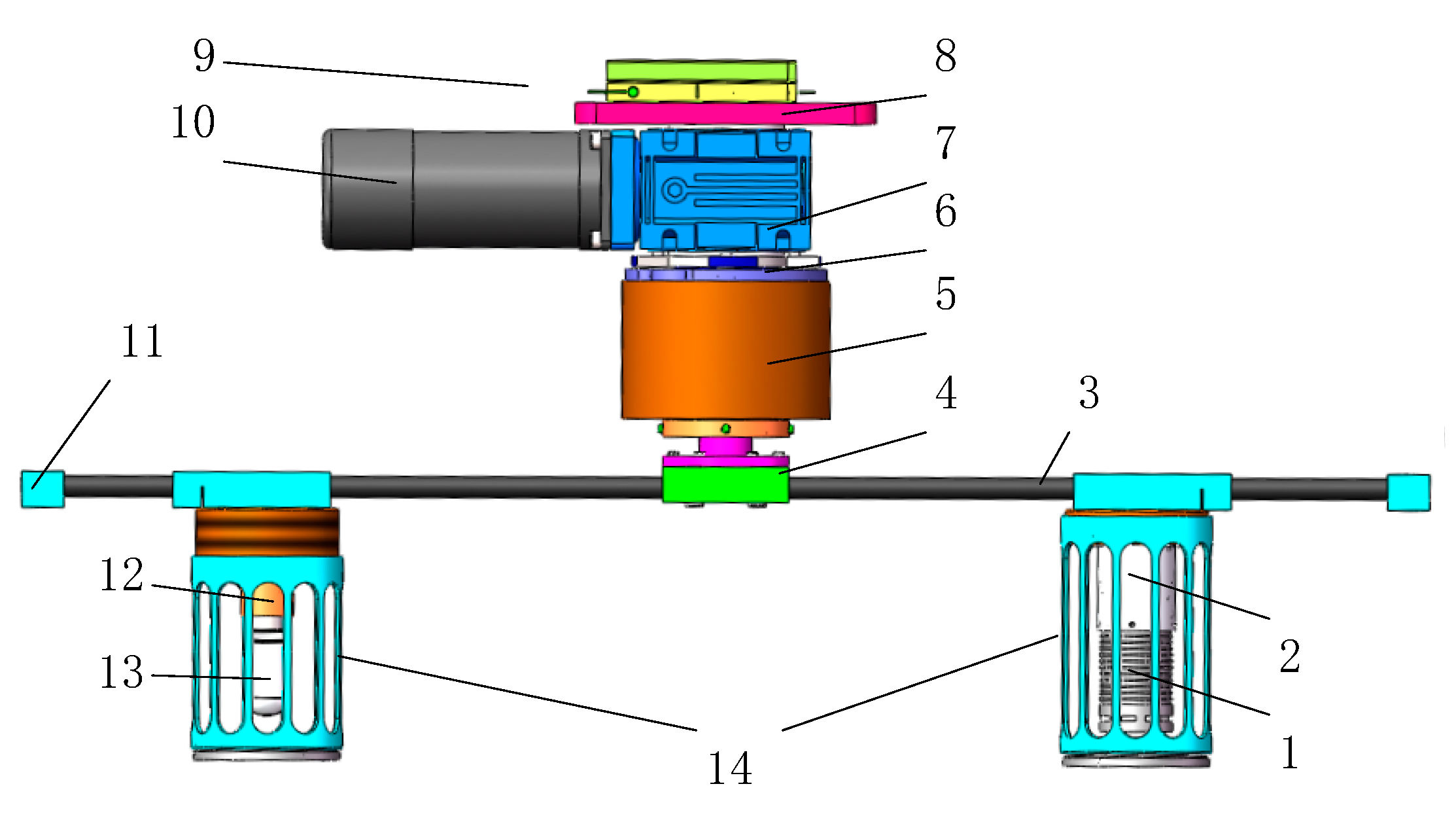
2.1. Overall Structural Design of the Detection Device
2.2. Design of Rotating Device of Detection Device
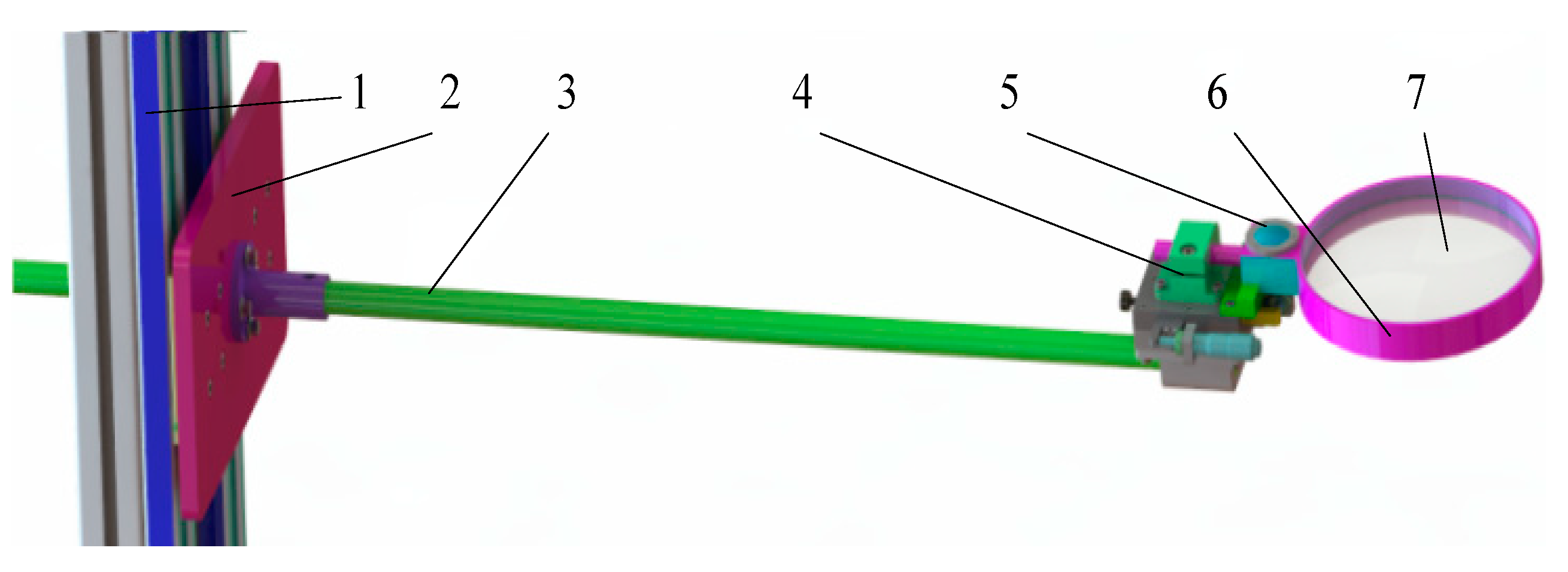
2.3. Design of Lens Mechanism of Detection Device
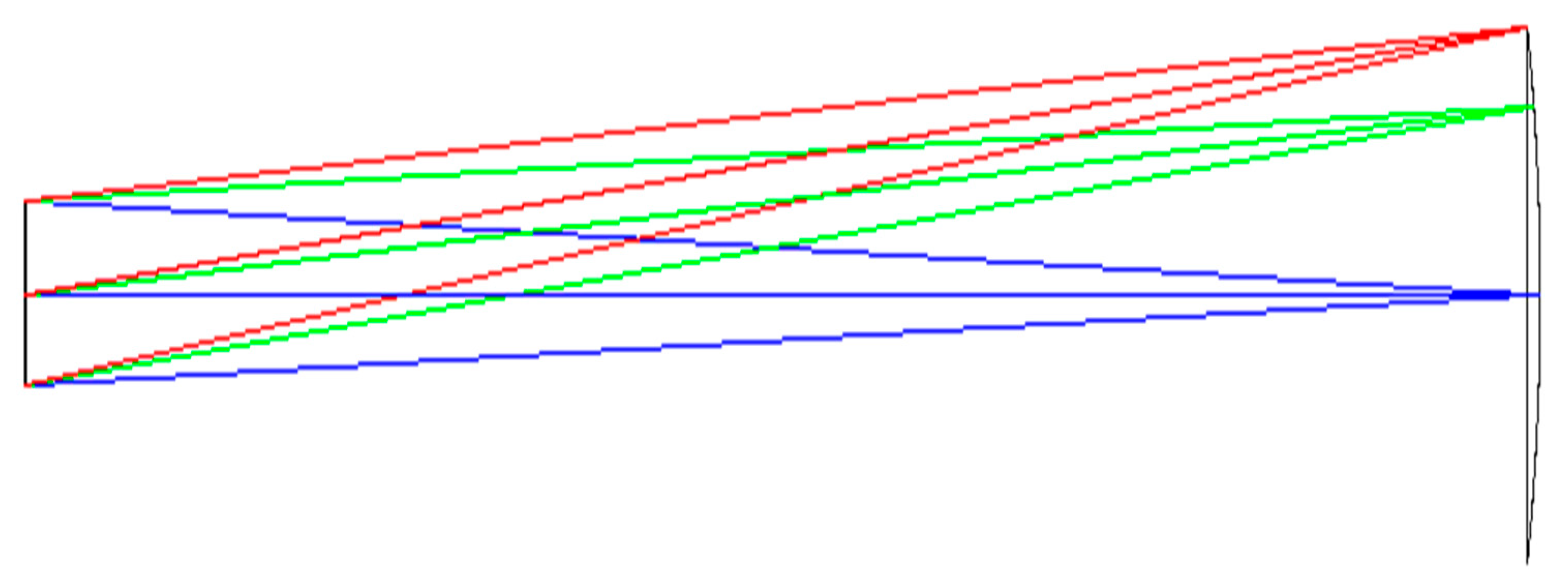
2.4. Design of Optical System of Detection Device
2.4.1. Scheme Design of Rotating Radiation Source
- (1)
- It can balance the blackbody and reach a balanced state;
- (2)
- It can be used as an interference source to test the ability of the seeker to hit the target under the influence of low temperature interference;
- (3)
- It can be used as a radiation source at low temperatures to test other types of missiles.
2.4.2. Scheme Design of Light Path
2.5. Design of Control System for Detection Device
2.6. Working Principle of Target Simulator
3. Eccentricity and Error Analysis of Infrared Guided Missile Detection Device
3.1. Analysis of Eccentricity of Detection Device Cantilever
3.2. Modeling and Solving of Translation Distance and Tilt Angle
3.2.1. Calculation of Translational Distance and Tilt Angle
3.2.2. Kinematics Modeling of Translation and Tilt
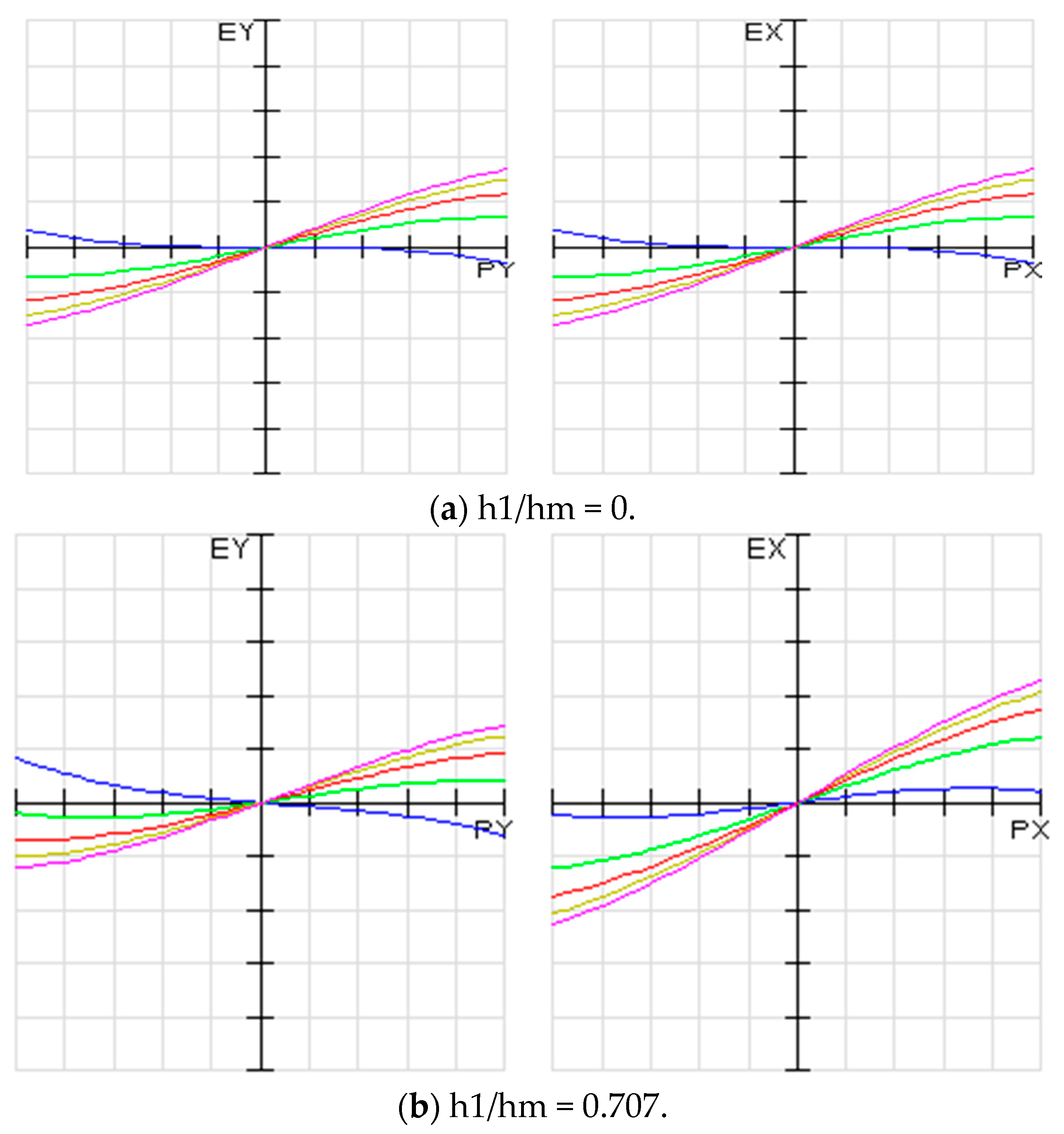
3.3. Aberration Analysis and Calculation of Eccentric and Tilt Systems
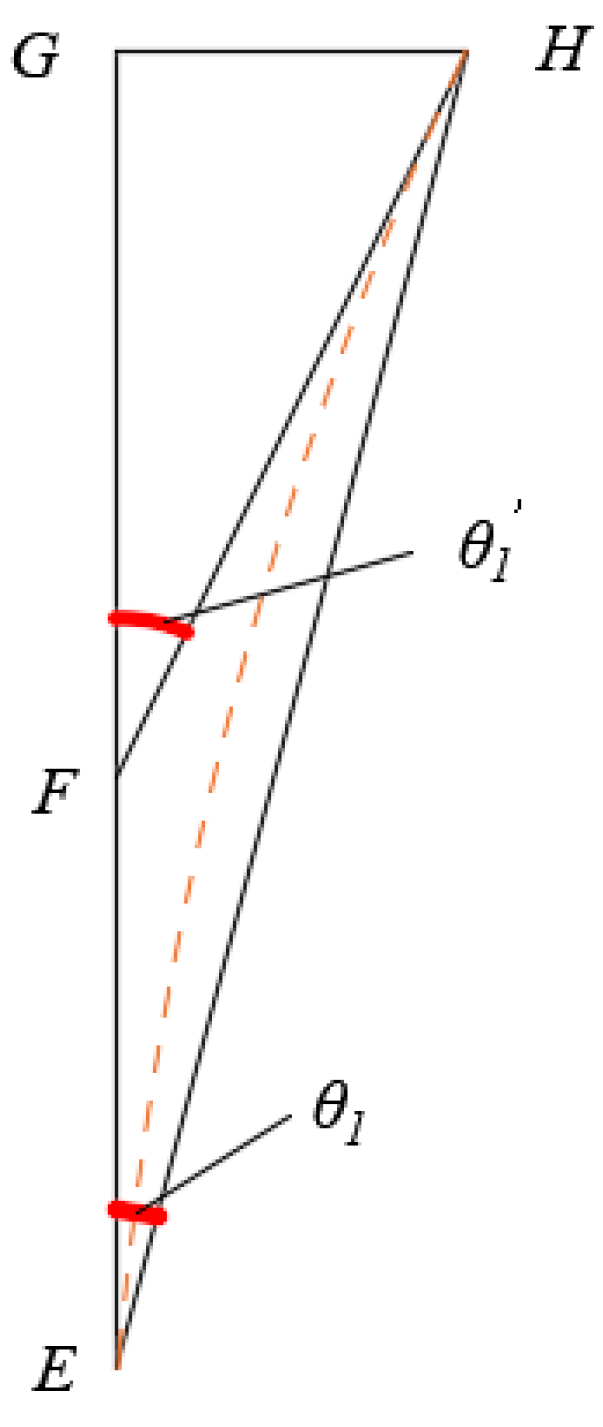
3.3.1. Computational Analysis of Coma
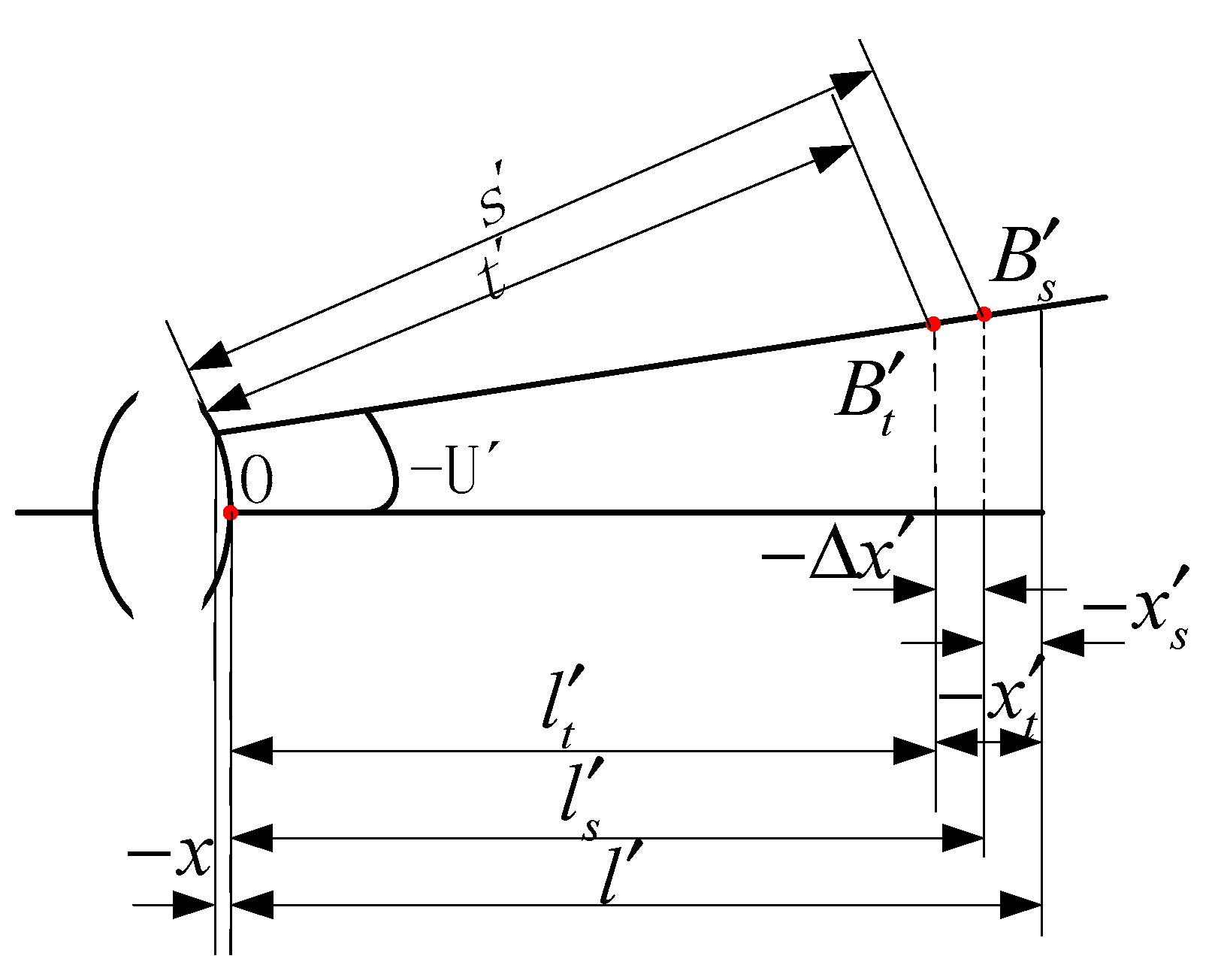
3.3.2. Computational Analysis of Astigmatism
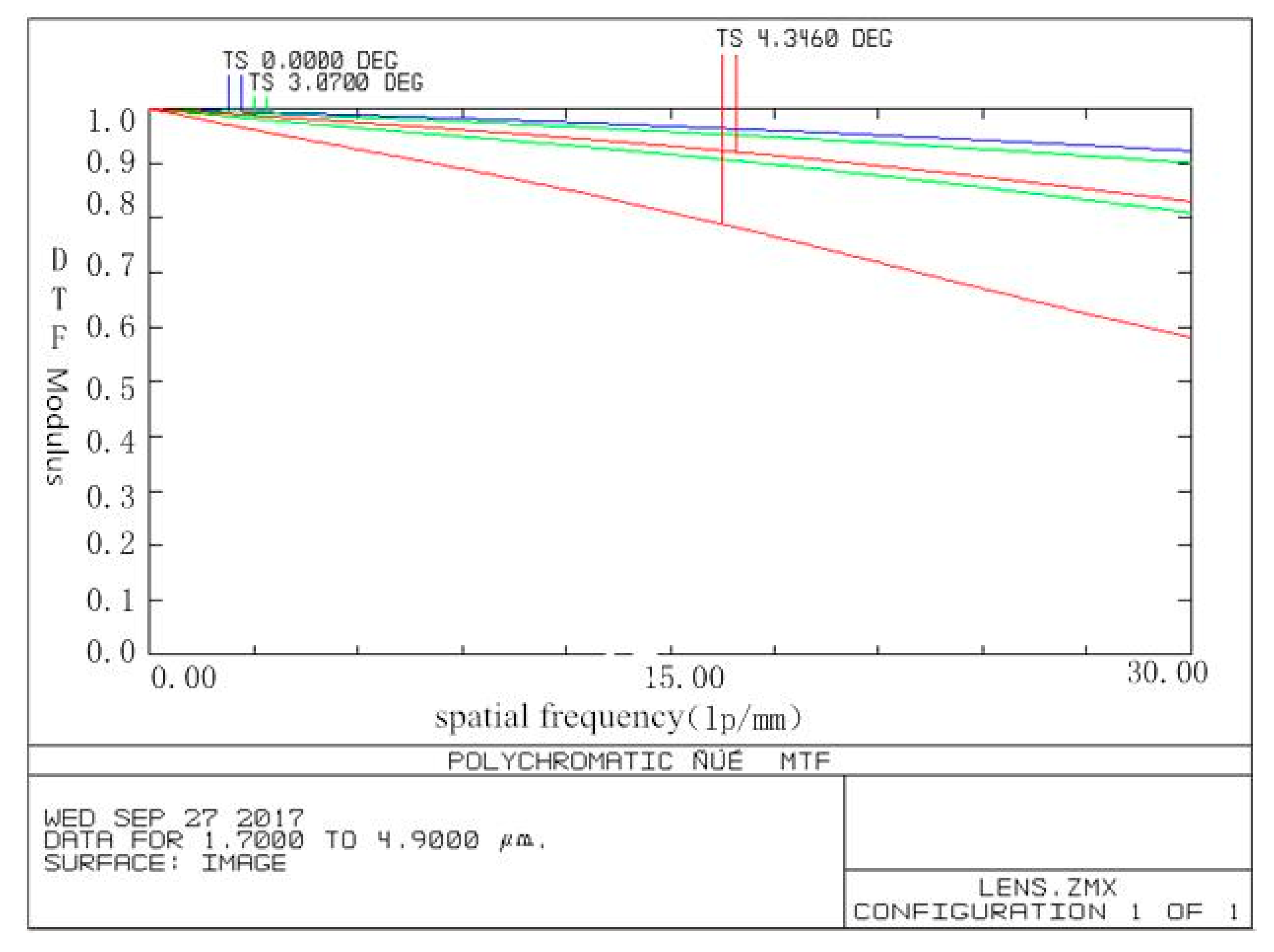
3.4. Optical Transfer Function to Evaluate Imaging Quality
3.5. Diffraction Problem Analysis
4. Experimental Study of Infrared Guided Missile Detection Device
4.1. Construction of the Body Structure of the Detection Device
4.2. Detection Device Hardware System Construction
4.3. Detection Device Rotation and Swing Operation Experiment
4.3.1. Positioning before Mechanism Experiment
4.3.2. Mechanism Movement Range Test
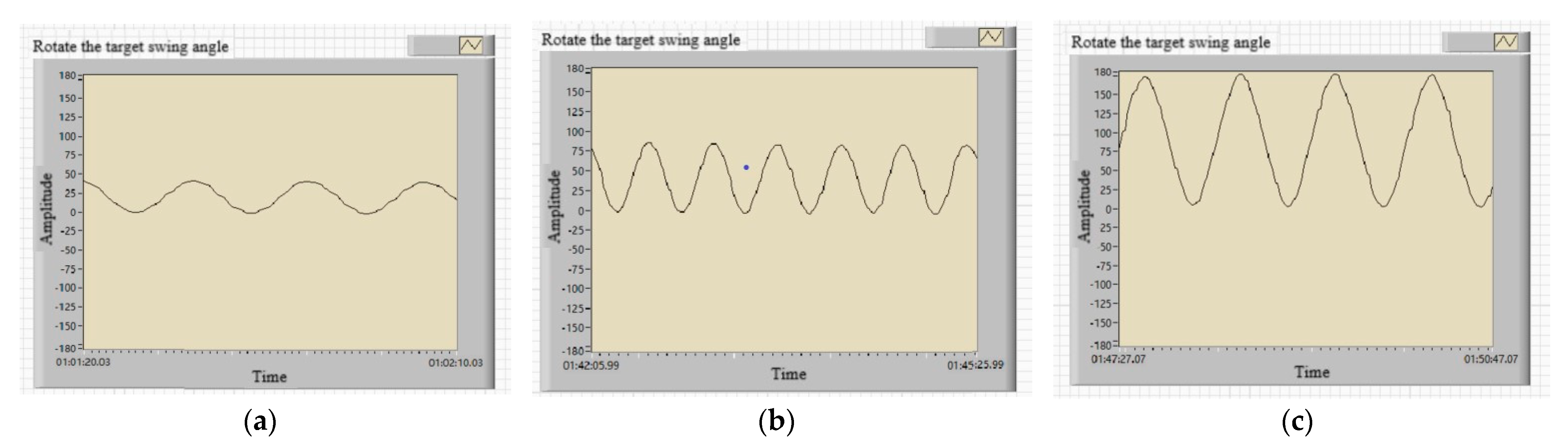
4.4. Verification of Rotation Angle
4.5. Detection Device Vibration Resistance Stability Swing Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Acronyms/Symbols | Explanation |
| MTF | Modulation Transfer Function |
| DC | Direct Current |
| λ | Wavelength |
| y | The distance between the blackbody and the central axis |
| l1 | Entrance pupil diameter |
| l2 | Exit pupil diameter |
| F | F-number |
| ω | The field angle |
| ZEMAX | Optical design software |
| PLC | Programmable logic controller |
| ωmax | Maximum deflection |
| θmax | Angle |
| E | Modulus of elasticity |
| I | Moment of inertia |
| D-H | Denavit-Hartemberg [26] |
| DOF | Degree of freedom |
| The incident angle | |
| Meridian coma aberration | |
| The sagittal coma | |
| The meridional image point | |
| The sagittal image point | |
| The axial distance of the refraction point M of the principal ray on the sphere relative to | |
| The axial distance of the refraction point M of the principal ray on the sphere relative to | |
| The axial distance of the refraction point M of the principal ray on the sphere relative to | |
| The axial distance of the refraction point M of the principal ray on the sphere relative to | |
| The meridian field area | |
| The sagittal field area | |
| Astigmatism | |
| θ | The dispersion angle |
| The angular diameter of Airy spot | |
| δl | The line diameter |
| f’ | Focal length |
| RS232 | Recommeded standard 232 |
| DSP | Digital Signal Processing |
| FOC | Field-oriented control |
| PNP | P-N-P |
| PI | Purse input |
| DO | Digital output |
| MiniUSB | Mini UniversalSerialBUS |
| LabVIEW | A program development environment developed by NATIONAL Instruments (NI) |
| VISA | Virtual Instrument Software Architecture |
| ARM | Advanced RISC Machines |
References
- Sakarya, D.U.; Sari, H. Design of dual mode seeker for millimeter wave and four-quadrant detectors in missile application. In Optomechanical Engineering 2019; SPIE-International Society for Optics and Photonics: Bellingham, WA, USA, 2019. [Google Scholar]
- Zhao, J.; Yang, S.; Xiong, F. Cooperative guidance of seeker-less missile considering localization error. Chin. J. Aeronaut. 2019, 32, 1933–1945. (In Chinese) [Google Scholar] [CrossRef]
- Lv, J.; Luo, Y.; Qing, S.; Ye, J.B.; Zhou, X.Y.; Zhou, X.Q. Analysis of the application of infrared guidance technology in air-to-air missiles. Ordnance Equip. Eng. News 2017, 38, 70–74. (In Chinese) [Google Scholar]
- Lu, Y.; Kong, W.H.; Li, J. Analysis on Development of Test Capabilities of Semi-physical Simulation Tests of Foreign Tactical Missiles. Tactical Missile Technol. 2020, 02, 99–104. (In Chinese) [Google Scholar]
- Yang, X.D.; Chen, X.L. Development of infrared guided weapon simulation system. Infrared Laser Eng. 1998, 27, 16–19. (In Chinese) [Google Scholar]
- Zhou, Q. Dynamic Scene Simulation Techonlogy Used for Infrared Seeker. In International Symposium on Photoelectronic Detection and Imaging 2009: Advances in Infrared Imaging and Applications; SPIE-International Society for Optics and Photonics: Bellingham, WA, USA, 2009; Volume 7384, p. 73832W. [Google Scholar]
- Seppanen, M.S. Special Purpose Simulator Development. In Proceedings of the 1990 Winter Simulation Conference, New Orleans, LA, USA, 9–12 December 1990; pp. 67–71. [Google Scholar]
- Chen, H.J. British Aircraft System Simulation Technology. Syst. Eng. Electron. 1984, 1, 1–12. (In Chinese) [Google Scholar]
- Peng, G.Y. British Aerospace Corporation’s simulation experiments and several related laboratories. Syst. Eng. Electron. Technol. 1984, 1, 13–26. (In Chinese) [Google Scholar]
- Chen, X.D. Summary of Hardware-in-the-Loop Simulations of Foreign Tactical Missile Guidance Systems. Syst. Eng. Electron. 1984, 1, 26–35. (In Chinese) [Google Scholar]
- William, L.; Wolfe, G.; Lissis, J. The Infrared Handbook; Environmental Research Institute of Michigan: Ann Arbor, MI, USA, 1978; pp. 63–67. [Google Scholar]
- Beasslec, R.J.; Popper, H. Infrared Simulation System (IRSS). Phase I Final Report; Defense Technical Information Center: Fort Belvoir, VA, USA, 1977. [Google Scholar]
- Huang, C.; Chen, H.Q.; Li, J.; Yang, Z.G.; Zhao, S. System Design and Description of Infrared Simulator System Based on the Multidimensional Flight Table. In Photonics and Optoelectronics Meetings (POEM) 2008: Laser Technology and Applications; SPIE-International Society for Optics and Photonics: Bellingham, WA, USA, 2009; Volume 7276, p. 72760M. [Google Scholar]
- Bianco, V.; Mazzeo, P.L.; Paturzo, M.; Distante, C.; Ferraro, P. Deep learning assisted portable IR active imaging sensor spots and identifies live humans through fire. Opt. Lasers Eng. 2020, 124, 105818. [Google Scholar] [CrossRef]
- Hill, J.E. Techniques for Simulation Multi-mode Seekers. In Proceedings of the 1992 Summer Computer Simulation Conference, Reno, NV, USA, 27–30 July 1992; pp. 836–849. [Google Scholar]
- Sholes, W.J.; Buford, J.A., Jr.; Harrison, K.R.; Barnette, J.S. System Description and Applications of the Imaging Infrared Simulation System III at the U.S. Army Aviation and Missile Command. In Technologies for Synthetic Environments: Hardware-in-the-Loop Testing V; SPIE-International Society for Optics and Photonics: Bellingham, WA, USA, 2000; Volume 4027, pp. 22–29. [Google Scholar]
- John, S.C. A Second Generation Millimeter Wave Hardware in-the-loop Simulation Facility. In Proceedings of the 1994 Summer Computer Simulation Conference, San Diego, CA, USA, 18–20 July 1994; pp. 373–378. [Google Scholar]
- Wang, Z.L.; Zhang, W. Research on optical technology of infrared imaging target simulator based on zoom system. Opt. Tech. 2004, 30, 420–422. (In Chinese) [Google Scholar]
- Shanmugam, L.; Naebe, M.; Kim, J.; Varley, R.J.; Yang, J. Recovery of Mode I self-healing interlaminar fracture toughness of fiber metal laminate by modified double cantilever beam test. Compos. Commun. 2019, 16, 25–29. [Google Scholar] [CrossRef] [Green Version]
- Terasaki, N.; Fujio, Y.K.; Horiuchi, S.; Akiyama, H. Mechanoluminescent studies of failure line on double cantilever beam (DCB) and tapered-DCB (TDCB) test with similar and dissimilar material joints. Int. J. Adhes. Adhes. 2019, 93, 102328. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Dong, J.X.; Zhang, Z.Q.; Sun, H.S.; Mei, G.H. Circle vector function applied to ray tracing in MCM for calculating effective emissivities of blackbody cavities. Infrared Phys. Technol. 2019, 104, 103104. [Google Scholar] [CrossRef]
- Juan, C.V.; Jorge, G.M. On-axis diffraction- limited design of bi-parabolic singlet lenses. Optik 2019, 193, 162970. [Google Scholar]
- Liu, Z.Y.; Li, W.B.; Wang, Y.; Qi, Y. Correction of keystone distortion in tilted imaging systems using a digital micro-mirror. Appl. Opt. 2019, 58, 5465–5471. [Google Scholar] [CrossRef]
- Haller, P.; Genge, B.; Duka, A.V. On the practical integration of anomaly detection techniques in industrial control applications. Int. J. Crit. Infrastruct. Prot. 2019, 24, 48–68. [Google Scholar] [CrossRef]
- Stockman, M.; Dwivedi, D.; Gentz, R.; Peisert, S. Detecting control system misbehavior by fingerprinting programmable logic controller functionality. Int. J. Crit. Infrastruct. Prot. 2019, 26, 100306. [Google Scholar] [CrossRef] [Green Version]
- Felicetti, L.; Sabatini, M.; Pisculli, A.; Gasbarri, P.; Palmerini, G.B. Adaptive thrust vector control during on-orbit servicing. In Proceedings of the AIAA SPACE 2014 Conference and Exposition, San Diego, CA, USA, 4–7 August 2014. [Google Scholar]




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | |
| 2 | 0 | 0 | ||
| 3 | 0 | 0 | ||
| 4 | 0 | 0 |
| Direction | Frequency Range (Hz) | Total Square Root Acceleration (g) | Spectral Density (g2/Hz) | Vibration Time (s) |
|---|---|---|---|---|
| Y | 20~2000 | 5 | 0.028 | 12 |
| X | 20~2000 | 7.6 | 0.0628 | 12 |
| Test Conditions | |||||
|---|---|---|---|---|---|
| Frequency (Hz) | Amplitude (mm) | Acceleration (m/s2) | Test Duration (min) | ||
| X axis | Y axis | Z axis | |||
| (10 ± 2) | (2.0 ± 0.3) | ||||
| (20 ± 2) | (1.0 ± 0.15) | ||||
| (30 ± 2) | (0.8 ± 0.12) | ||||
| (40 ± 2) | (0.6 ± 0.19) | ||||
| (50 ± 2) | (0.4 ± 0.06) | (10 ± 1) | 5 | 5 | |
| (60 ± 2) | (0.3 ± 0.04) | ||||
| (80 ± 2) | (40 ± 8) | ||||
| (100 ± 2) | |||||
| (120 ± 2) | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Wu, Z.; Wang, T.; Zhang, B. Development of Infrared-Guided Missile Precision Detection Simulator. Machines 2021, 9, 198. https://doi.org/10.3390/machines9090198
Wang Z, Wu Z, Wang T, Zhang B. Development of Infrared-Guided Missile Precision Detection Simulator. Machines. 2021; 9(9):198. https://doi.org/10.3390/machines9090198
Chicago/Turabian StyleWang, Zhuo, Zhenyu Wu, Tao Wang, and Bo Zhang. 2021. "Development of Infrared-Guided Missile Precision Detection Simulator" Machines 9, no. 9: 198. https://doi.org/10.3390/machines9090198