
Research on Vehicle Adaptive Cruise Control Method Based on Fuzzy Model Predictive Control

Abstract
:1. Introduction
2. Fuzzy-MPC Based Vehicle Multi-Target Upper Controller
2.1. Longitudinal Kinematics Modelling of Two Vehicles
2.2. Scrolling Optimization
2.3. Variable Weight Coefficient Design Based on Fuzzy Control
2.4. Numerical Simulation Verification
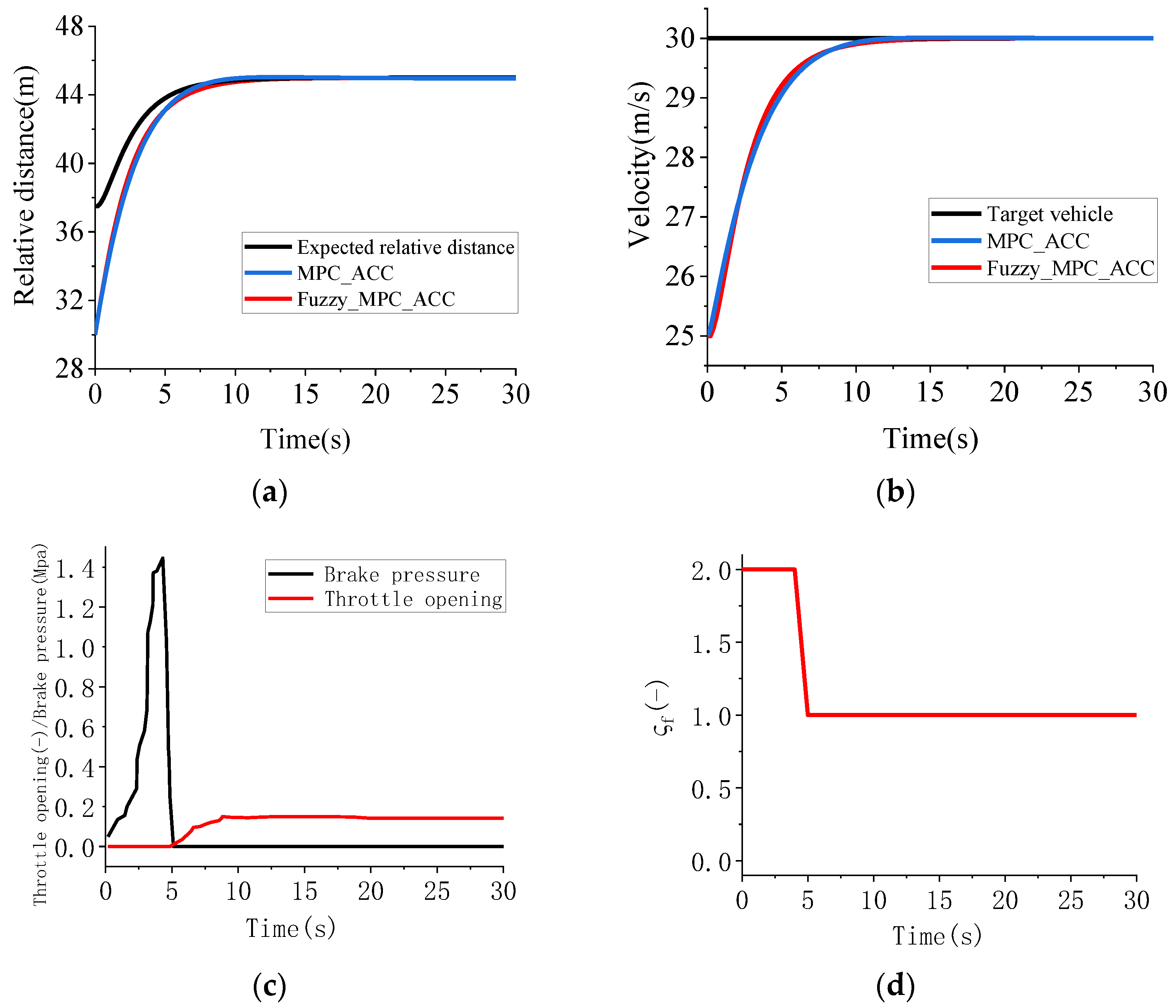
2.4.1. Normal Condition
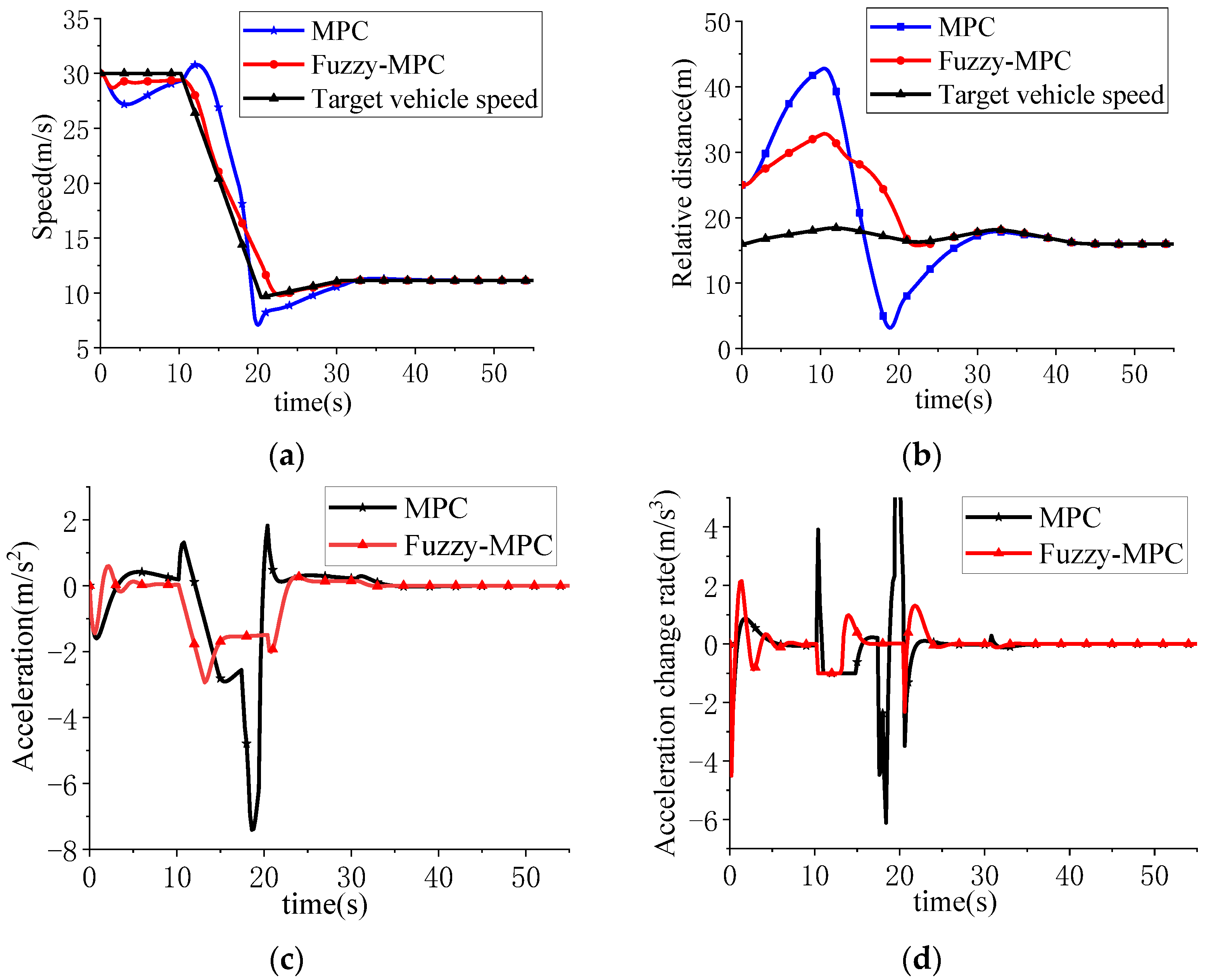
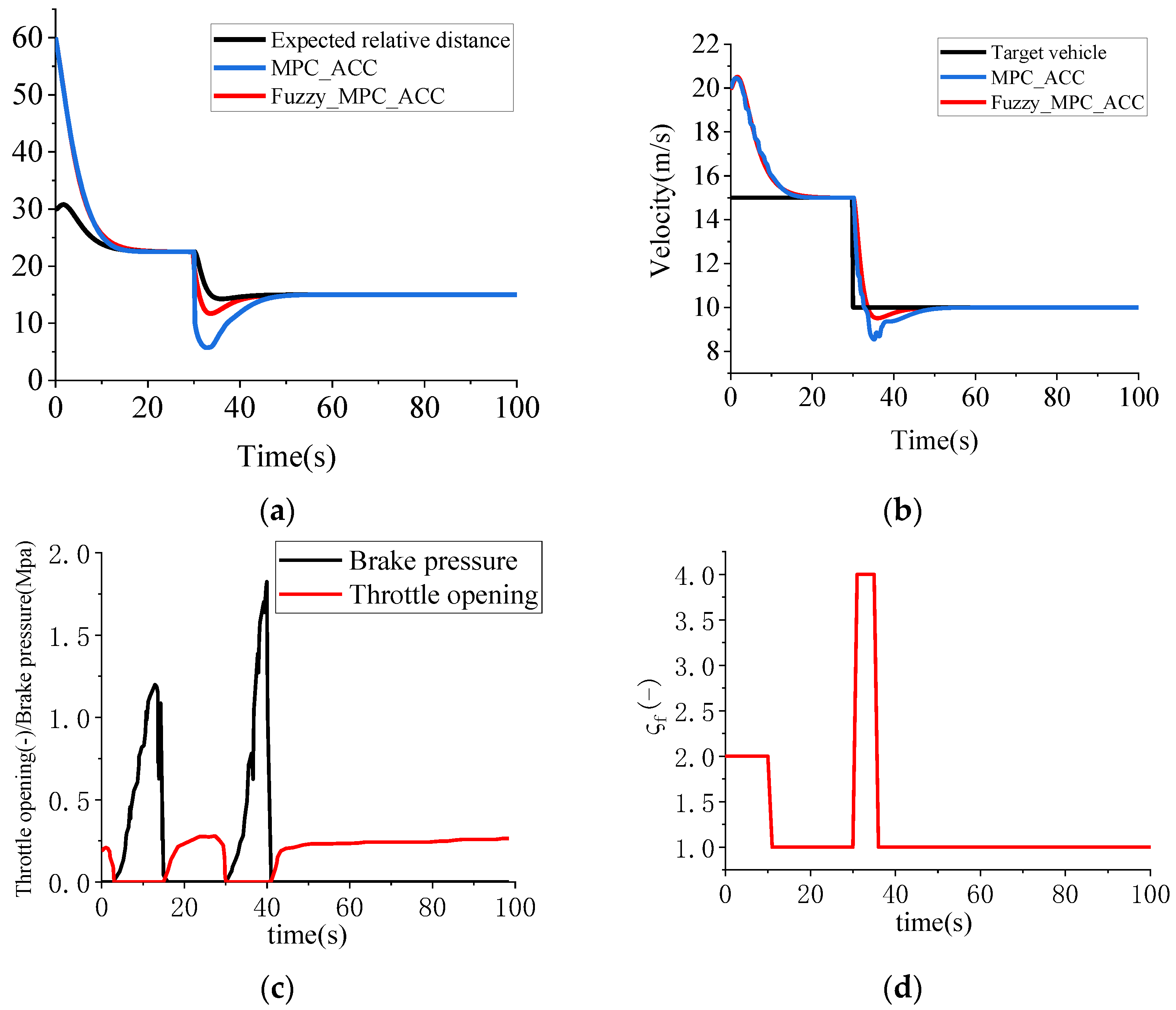
2.4.2. Emergency Conditions
3. Lower Controller Design
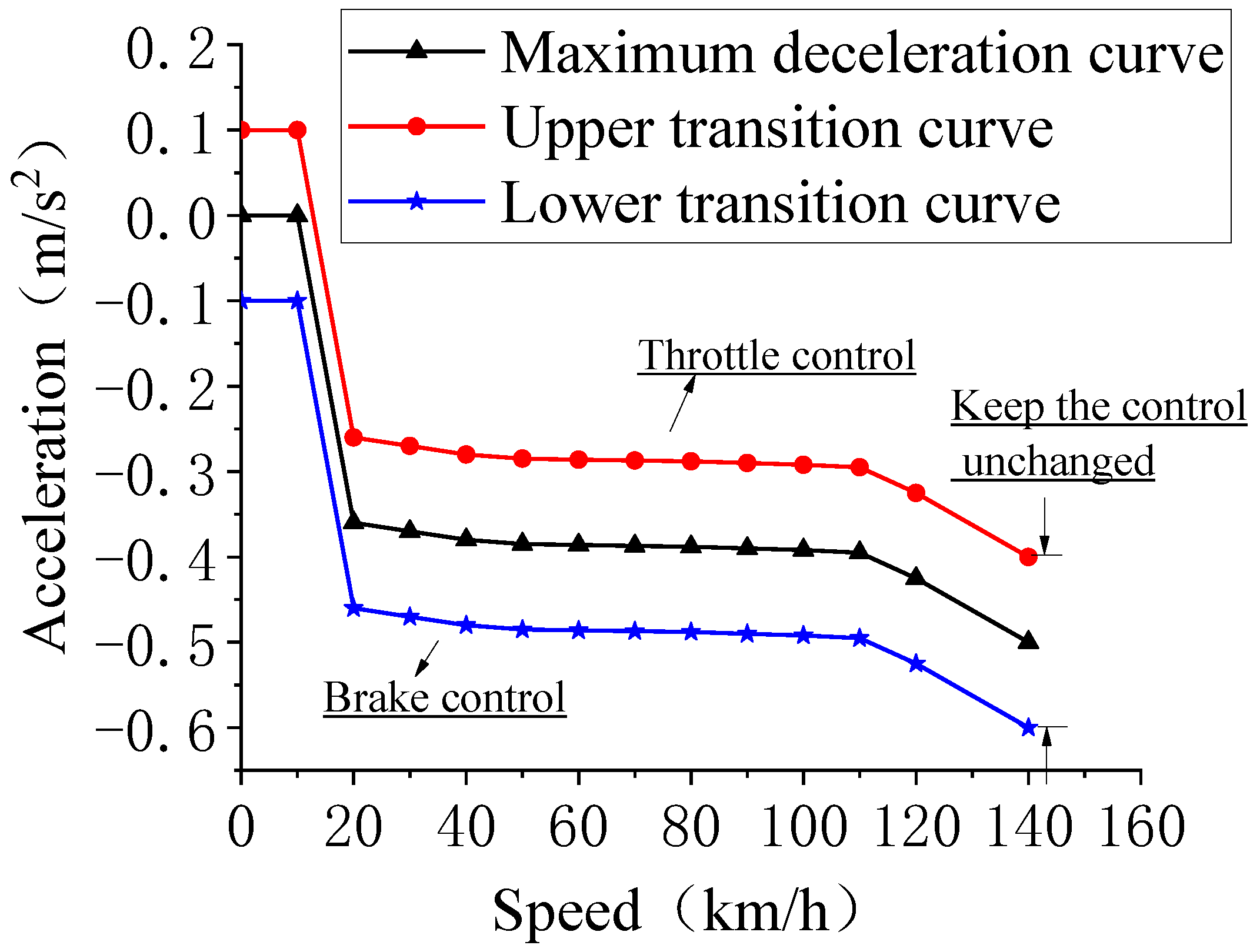
3.1. Throttle/Brake Switching Strategy
3.2. Throttle Control
3.3. Brake Control
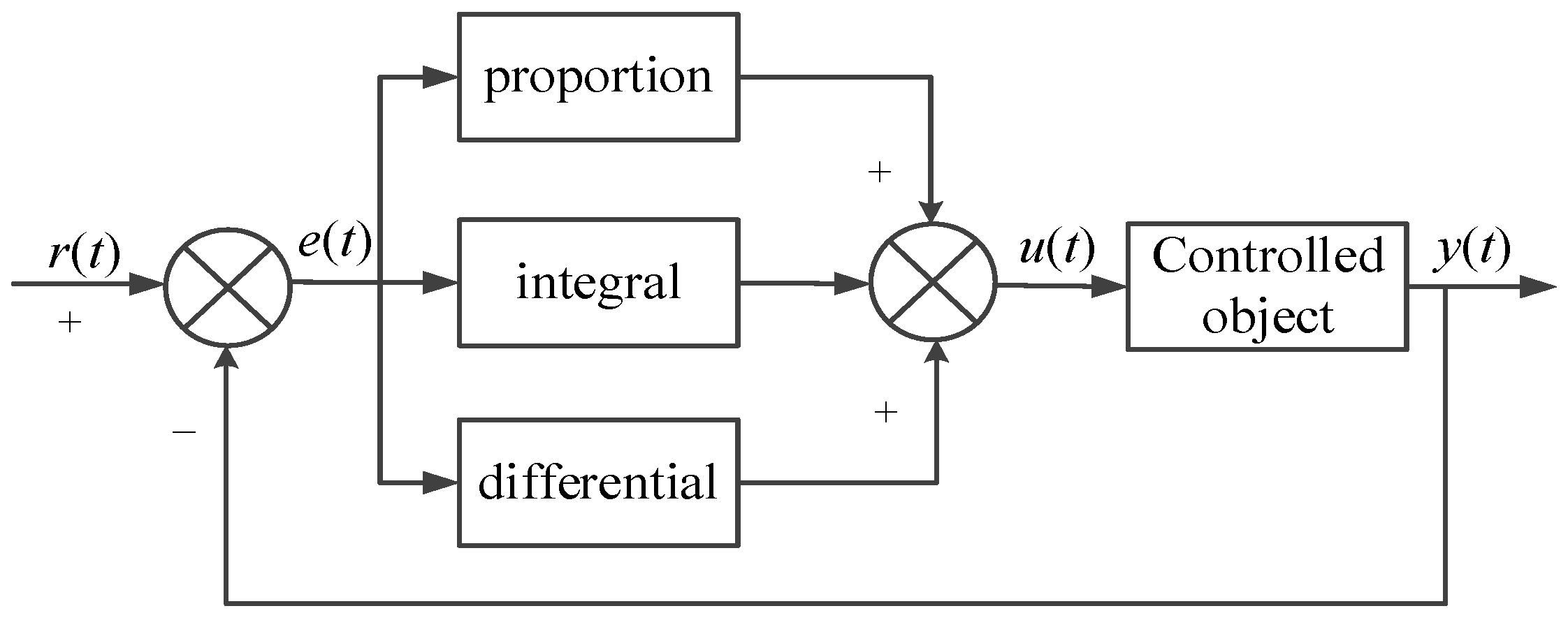
3.4. Design of Lower Controller Based on PID
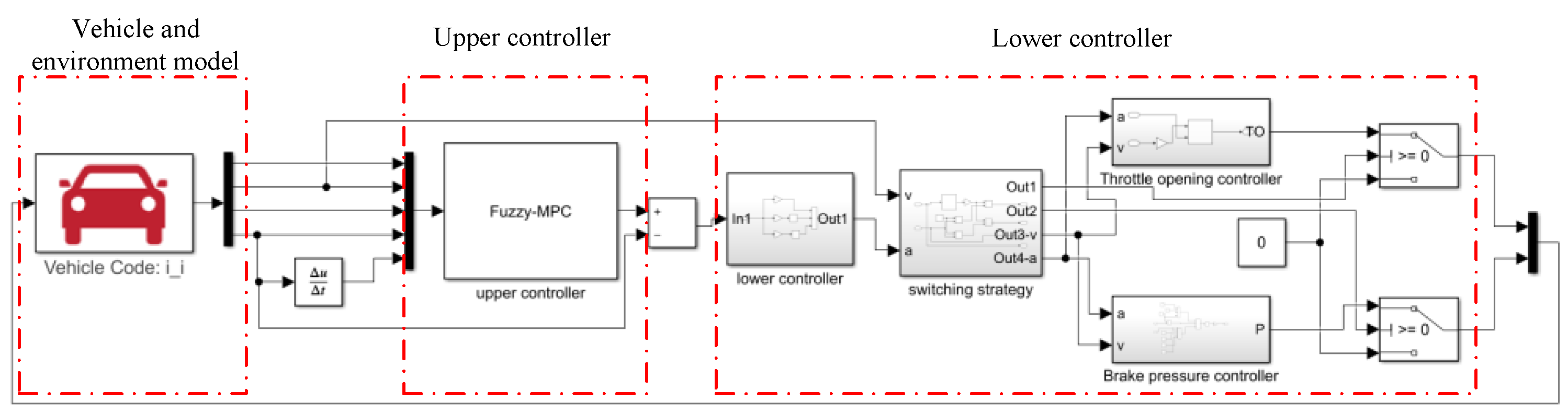
4. Co-Simulation Verification and Analysis
4.1. Follow the Vehicle Smoothly
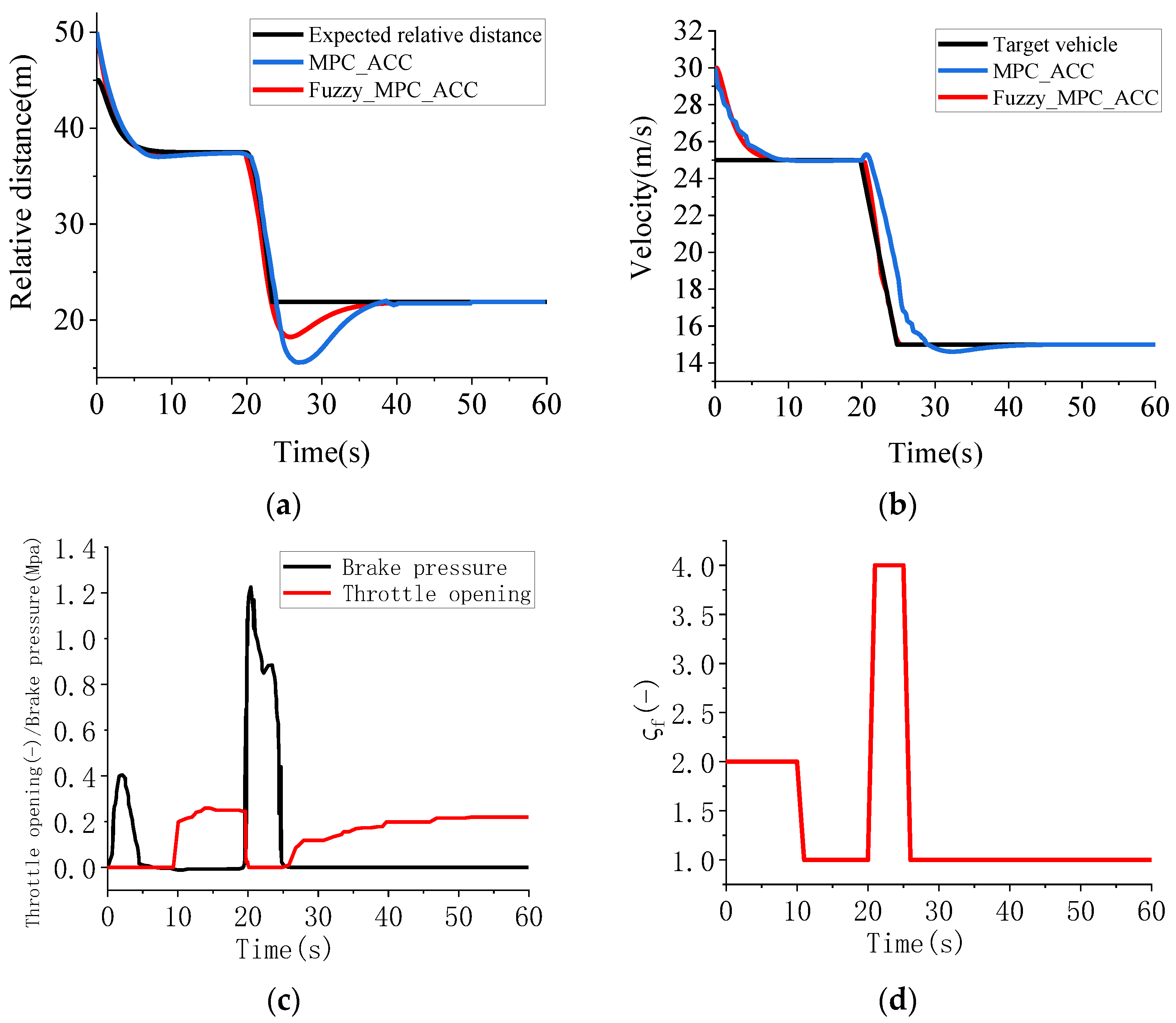
4.2. Target Vehicle Insertion
4.3. Emergency Braking
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xiao, L.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Veh. Syst. Dyn. 2010, 48, 1167–1192. [Google Scholar] [CrossRef]
- Vahidi, A.; Eskandarian, A. Research advances in intelligent collision cruise control systems. IEEE Trans. Intell. Transp. Syst. 2003, 4, 143–153. [Google Scholar] [CrossRef] [Green Version]
- Jianlong, Z.; Ioannou, P.A. Longitudinal control of heavy trucks in mixed traffic: Environmental and fuel economy considerations. IEEE Trans. Intell. Transp. Syst. 2006, 7, 92–104. [Google Scholar]
- Chan, Y.F.; Moallem, M.; Wang, W. Efficient implementation of PID control algorithm using FPGA technology. In Proceedings of the IEEE Conference on Decision and Control (CDC), Nassau, Bahamas, 16 May 2005. [Google Scholar]
- Canale, M.; Malan, S. Tuning of stop and go driving control strategies using driver behaviour analysis. In Proceedings of the IEEE Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; pp. 407–412. [Google Scholar]
- Corona, D.; Lazar, M.; Schutter, B.D.; Heemels, M. A hybrid MPC approach to the design of a smart adaptive cruise controller. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, Munich, Germany, 4–6 October 2006. [Google Scholar]
- Naus, G.; Ploeg, J.; Van De Molengraft, R.; Steinbuch, M. Explicit MPC design and performance-based tuning of an adaptive cruise control stop-&-go. In Proceedings of the Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008. [Google Scholar]
- Firoozi, R.; Nazari, S.; Guanetti, J.; O’Gorman, R.; Borrelli, F. Safe adaptive cruise control with road grade preview and V2V communication. arXiv 2018, arXiv:1810.09000. [Google Scholar]
- Tran, A.T.; Sakamoto, N.; Suzuki, T. A combination of analytical and model predictive optimal methods for adaptive cruise control problem. In Proceedings of the 2018 Australian & New Zealand Control Conference (ANZCC), Melbourne, Australia, 7–8 December 2018. [Google Scholar]
- Eom, H.; Lee, S.H. Human-automation interaction design for adaptive cruise control systems of ground vehicles. Sensors 2015, 15, 13916–13944. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Subiantoro, A.; Muzakir, F.; Yusivar, F. Adaptive cruise control based on multistage predictive control approach. In Proceedings of the International Conference on Nano Electronics Research and Education, Hamamatsu, Japan, 27–29 November 2018. [Google Scholar]
- Liu, H.; Miao, C.; Zhu, G.G. Economic adaptive cruise control for a power split hybrid electric vehicle. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4161–4170. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, K. A distributionally robust stochastic optimization-based model predictive control with distributionally robust chance constraints for cooperative adaptive cruise control under uncertain traffic conditions. Transp. Res. Part B Methodol. 2020, 138, 144–178. [Google Scholar] [CrossRef]
- Wu, W.; Zou, D.; Ou, J.; Hu, L. Adaptive cruise control strategy design with optimized active braking control algorithm. Math. Probl. Eng. 2020, 2020. [Google Scholar] [CrossRef]
- Jiang, J.; Ding, F.; Wu, J.; Tan, H. A personalized human drivers’ risk sensitive characteristics depicting stochastic optimal control algorithm for adaptive cruise control. IEEE Access 2020, 8, 145056–145066. [Google Scholar] [CrossRef]
- Kuragaki, S.; Kuroda, H.; Minowa, T.C. An adaptive control using wheel torque management technique. SAE Tech. Pap. 1998. [Google Scholar] [CrossRef]
- Yi, K.; Hong, J.; Kwon, Y.D. A vehicle control algorithm for stop-and-go cruise control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 1099–1115. [Google Scholar] [CrossRef]
- Broqua, F. Cooperative driving: Basic concepts and a first assessment of the intelligent cruise control strategies. In Proceedings of the DRIVE Conference, Brussels, Belgium, 4–6 February 1991; pp. 908–929. [Google Scholar]
- Li, X.; Zhang, X.; Zou, Y.; Zhang, T.; Wei, S. A research on the adaptive cruise controller for electric bus. In Society of Automotive Engineers (SAE)–China Congress; Springer: Singapore, 2018; pp. 415–432. [Google Scholar]
- Zhang, S.; Zhuan, X. Study on adaptive cruise control strategy for battery electric vehicle. Math. Probl. Eng. 2019, 2019. [Google Scholar] [CrossRef] [Green Version]
- Cheng, S.; Li, L.; Mei, M.M.; Nie, Y.-L.; Zhao, L. Multiple-objective adaptive cruise control system integrated with DYC. IEEE Trans. Veh. Technol. 2019, 68, 4550–4559. [Google Scholar] [CrossRef]
- David, J.; Brom, P.; Stary, F.; Bradáč, J.; Dynybyl, V. Application of artifitial neural networks to streamline the process of adaptive cruise control. Sustainability 2021, 13, 4572. [Google Scholar] [CrossRef]
- Luo, L.H.; Liu, H.; Li, P.; Wang, H. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. J. Zhejiang Univ. Sci. A Appl. Phys. Eng. 2010, 11, 191–201. [Google Scholar] [CrossRef]
- Zhang, J.H.; Li, Q.; Chen, D.P. Drivers imitated multi-objective adaptive cruise control algorithm. Control Theory Appl. 2018, 35, 769–777. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| d | HE | HC | GD | FC | FE | |
|---|---|---|---|---|---|---|
| vref | ||||||
| HE | FE | FE | FW | FC | FC | |
| HC | FE | FE | FW | FC | FE | |
| GD | FE | FE | FC | GD | GD | |
| FC | FE | FW | FC | GD | GD | |
| FE | FW | FC | GD | GD | GD | |
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| Ts | 0.2 | s | umin | −5.5 | m/s2 |
| 1 | s | 1 | - | ||
| 0.5 | m | 0 | - | ||
| d0 | 5 | m | 1 | - | |
| Np | 16 | - | −1 | - | |
| Nc | 5 | - | 0.1 | - | |
| vfmax | 35 | m/s | −0.1 | - | |
| vfmin | 0 | m/s | 0 | - | |
| afmax | −5.5 | m/s2 | 0 | - | |
| afmin | 2.5 | m/s2 | 0.1 | - | |
| jerkmax | 2.5 | m/s3 | −0.1 | - | |
| jerkmin | −2.5 | m/s3 | p1, p2, p3, p4, p5 | 3 | - |
| umax | 2.5 | m/s2 | w1, w2, w3, w4, w5 | 0.5 | - |
| v(km/h) | −1 | 0 | 1 | 1.5 | 2 | 2.5 | 3 | 4 | |
| 0 | 0 | 0 | 0.05 | 0.1 | 0.12 | 0.12 | 0.15 | 4 | |
| 10 | 0 | 0.1 | 0.12 | 0.12 | 0.13 | 0.15 | 0.18 | 0.2 | |
| 20 | 0 | 0.12 | 0.14 | 0.18 | 0.2 | 0.2 | 0.25 | 0.4 | |
| 30 | 0 | 0.12 | 0.17 | 0.2 | 0.25 | 0.3 | 0.35 | 0.5 | |
| 40 | 0 | 0.13 | 0.2 | 0.25 | 0.3 | 0.35 | 0.45 | 0.7 | |
| 80 | 0 | 0.15 | 0.3 | 0.45 | 0.5 | 0.7 | 1 | 1 | |
| 120 | 0 | 0.2 | 0.45 | 0.7 | 1 | 1 | 1 | 1 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, J.; Yang, L.; Hu, Y.; Liu, K.; Du, J. Research on Vehicle Adaptive Cruise Control Method Based on Fuzzy Model Predictive Control. Machines 2021, 9, 160. https://doi.org/10.3390/machines9080160
Mao J, Yang L, Hu Y, Liu K, Du J. Research on Vehicle Adaptive Cruise Control Method Based on Fuzzy Model Predictive Control. Machines. 2021; 9(8):160. https://doi.org/10.3390/machines9080160
Chicago/Turabian StyleMao, Jin, Lei Yang, Yuanbo Hu, Kai Liu, and Jinfu Du. 2021. "Research on Vehicle Adaptive Cruise Control Method Based on Fuzzy Model Predictive Control" Machines 9, no. 8: 160. https://doi.org/10.3390/machines9080160