1. Introduction
Automobile lightweight design is one effective way to reduce energy consumption and emission and to improve vehicle braking efficiency [
1,
2,
3,
4]. It is especially important for the commercial vehicle, since it can also enhance the profits for consumers. The lightweight commercial vehicle structure makes it able to carry much more cargo without increasing its overall weight [
5]. High strength steel has been widely used in commercial vehicle structures since it shows an attractive combination of mass reduction potential and material cost saving [
6,
7,
8]. Therefore, optimization design is necessary for the development process of commercial vehicle components to achieve the appropriate distribution of high-strength steel in the structure for avoiding additional cost.
For vehicle lightweight design problems, there are always two or more optimization objectives to be achieved, while these objectives generally conflict with each other. Multi-objective optimization methods are employed to solve this problem in many engineering fields recently. Zhou et al. [
9] designed a novel automotive bumper of negative Poisson’s ratio (NPR) structure. Then, a multi-objective robust optimization method based on particle swarm optimization algorithm and six sigma criteria was employed to optimize the NPR structure parameters, for improving its energy absorption capacity. Vo-Duy et al. [
10] used the NSGA-II algorithm to solve the multi-objective optimization of a laminated composite beam, for minimizing its weight and maximizing the natural frequency. Liu et al. [
11] presented an improved particle swarm optimization algorithm to conduct the lightweight design of auto-body by considering its crashworthiness. Wang et al. [
12] conducted the multi-objective parameter optimization of the powertrain and control strategy of a hybrid electric vehicle, which achieved energy and fuel-saving as well as power performance improvement. Xie et al. [
13] performed the multi-objective lightweight design of S-rails of cab-in-white of the commercial vehicle to reduce its weight and improve the crashworthiness performances. Jiang et al. [
14] performed multi-objective optimization of the control arm and torsion beam. After optimization, the weights of the control arm and torsion beam are reduced by 0.505 kg and 1.189 kg, respectively.
In order to efficiently solve these multi-objective optimization problems, the surrogate models are usually adopted because of their affordable computational cost. Craig et al. [
15] used a response surface surrogate model to improve the efficiency of finding lightweight parameters for enhancing automotive crashworthiness, which also reduced the total cost of the optimization. The surrogate model was used by Wang et al. [
16] to achieve the lightweight goal of the body in white (BIM), which improved the efficiency of lightweight optimization. The weight is reduced by 4.91 kg, which is as much as 5.70%. Ren et al. [
17] performed the multi-objective optimization of the lightweight design of the vehicle frame based on the Kriging surrogate model, which realized the weight reduction of the frame and the improvement of its dynamic performance. Gao et al. [
18] used the Kriging surrogate model to optimize the layout of the welded side frame of the intercity electric multiple unit (EMU) bogie frames. After optimization, the weight of the EMU was reduced by 16% with the improvement of fatigue performance.
Normally, the best compromise solution is not easy to select from the Pareto set obtained by multi-objective optimization without enough engineering knowledge. TOPSIS (technique for order preference by similarity to an ideal solution) can convert multiple performance indicators into a single comprehensive index for evaluation and analysis, which is broadly used in many engineering fields. Wang et al. [
19] used the improved NSGA-II algorithm and TOPSIS method to perform the multi-objective lightweight design of the car subframe. Pirmohammad et al. [
20] studied the effect of length ratio of inner tube to outer tube on crashworthiness of polyurethane foam filled tapered tube, and obtained the best length ratio by the TOPSIS method. On the basis of the analysis of the influence of the damping coefficient and the spring stiffness on suspension performance, Wang et al. [
21] improved the lightweight and crashworthiness performance of B-pillar based on the modified particle swarm optimization algorithm and TOPSIS. Ebrahimi-Nejad et al. [
21] employed the TOPSIS method to carry out the multi-objective optimization of the suspension system and determined the optimal scheme. In order to improve vehicle ride comfort, Ebrahimi-Nejad et al. [
22] adopted the TOPSIS method to seek the best value of the suspension stiffness and damping. Jiang et al. [
23] replaced the material of steel bumper anti-collision beam with carbon fiber reinforced plastic (CFRP), and used entropy weighted TOPSIS method to optimize the stacking sequence of CFRP anti-collision beam, so as to achieve the goal of weight reduction under the premise of ensuring the crashworthiness of bumper beam. Ni et al. [
24] established a multi-objective optimization model with the minimum energy consumption and optimal machining quality and optimized the cutting parameters and hob parameters by using the improved grey wolf algorithm and TOPSIS method. Accordingly, the TOPSIS method can also be used to determine the best compromise solution to the multi-objective optimization problem.
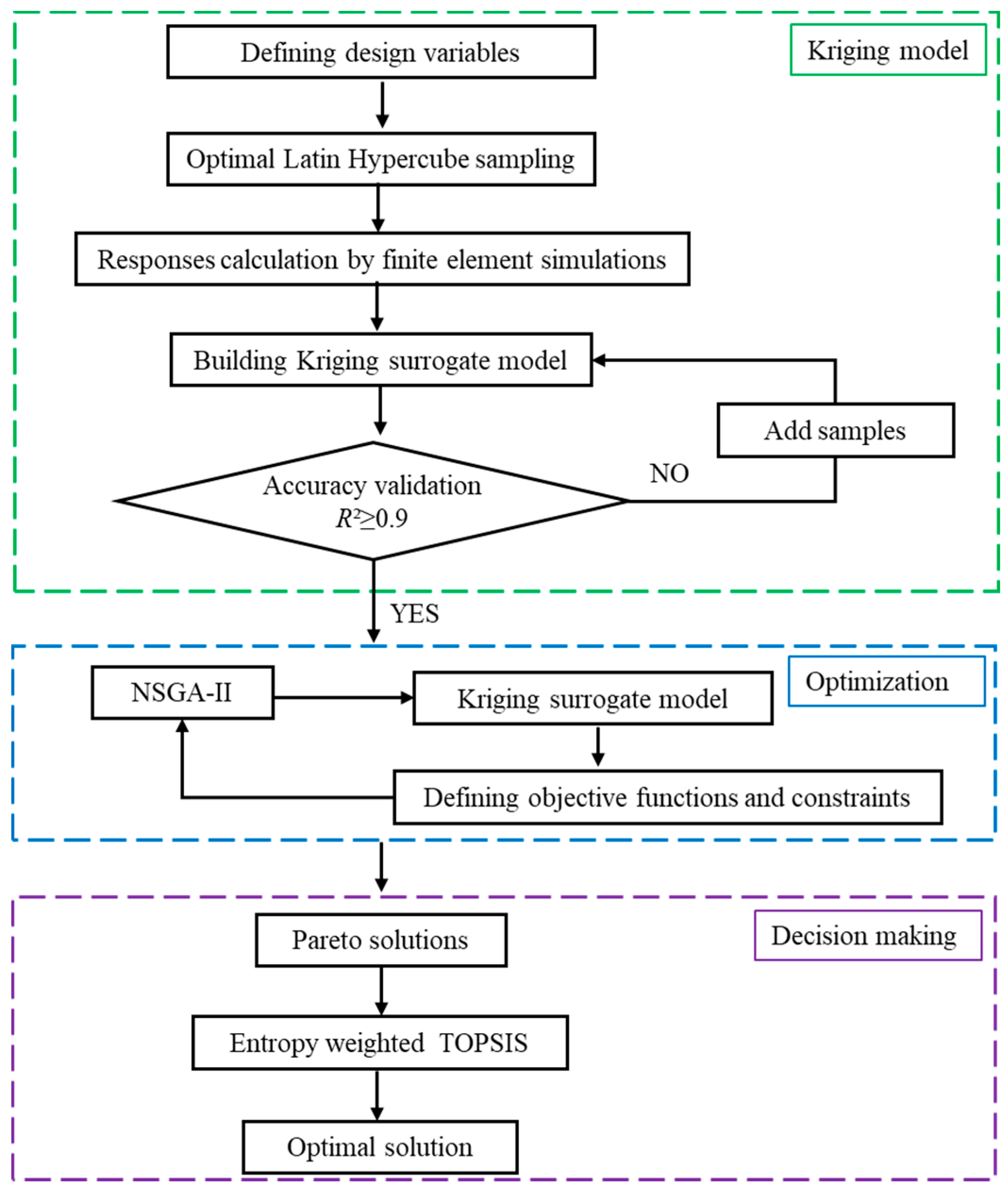
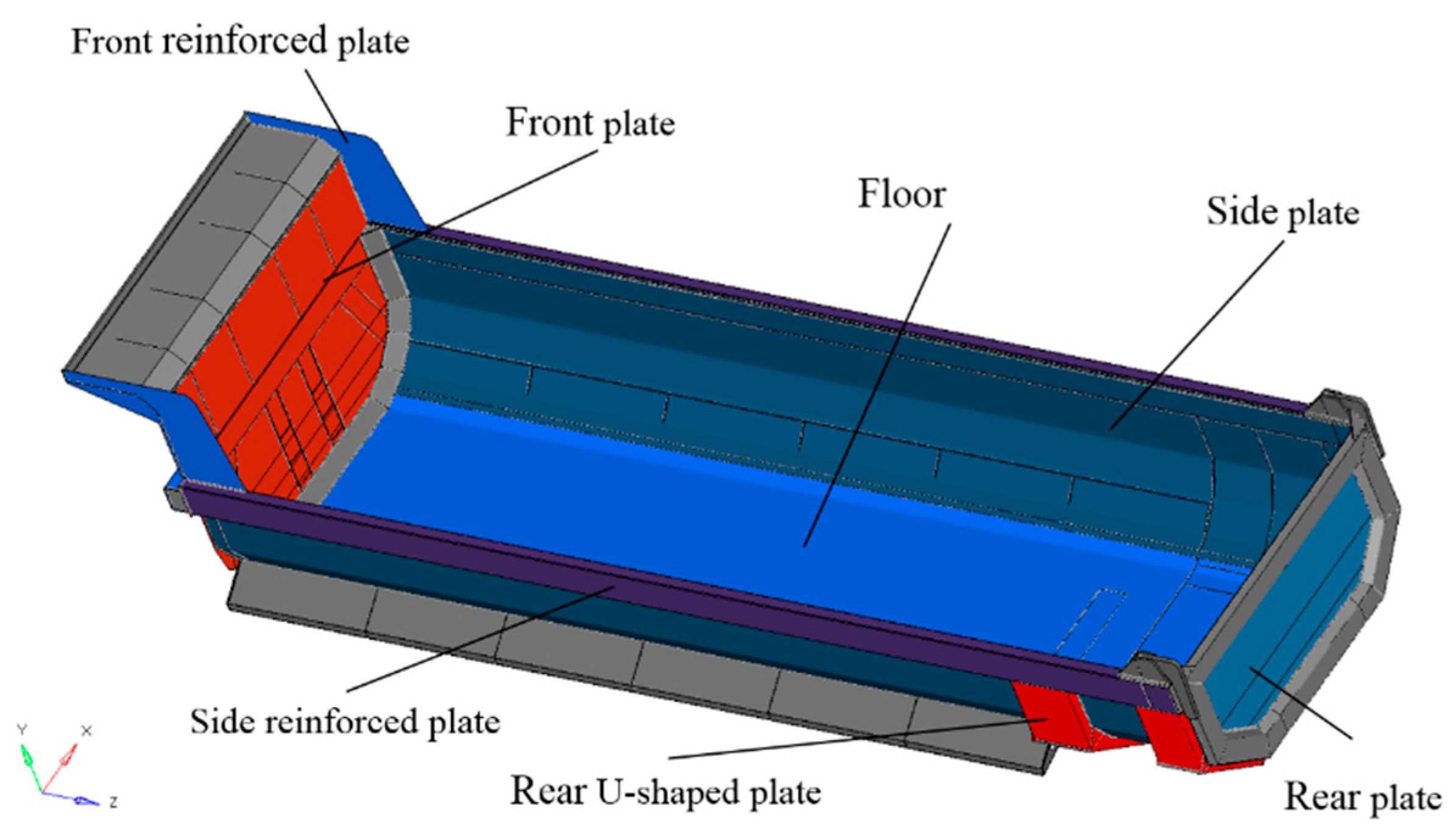
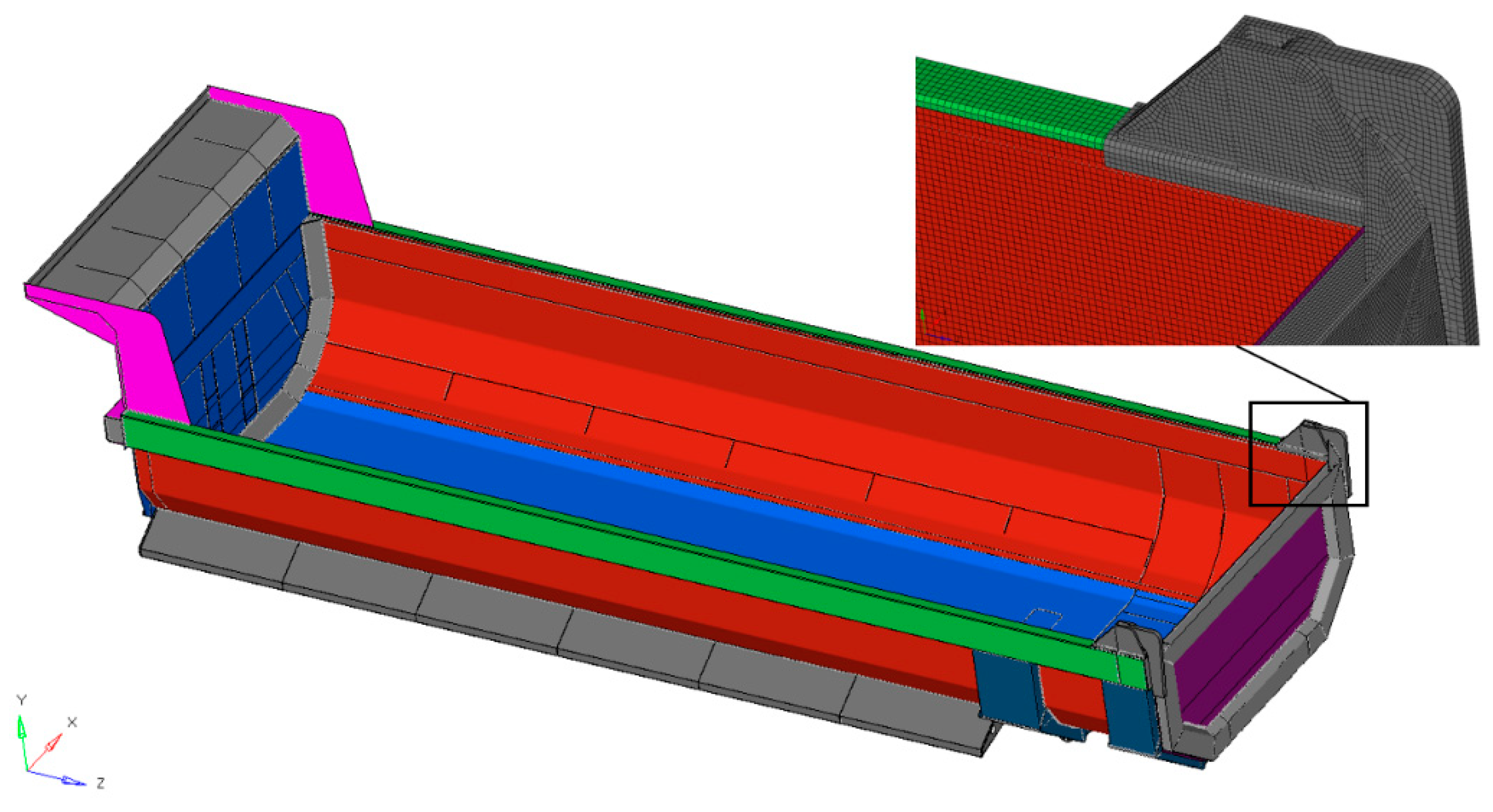
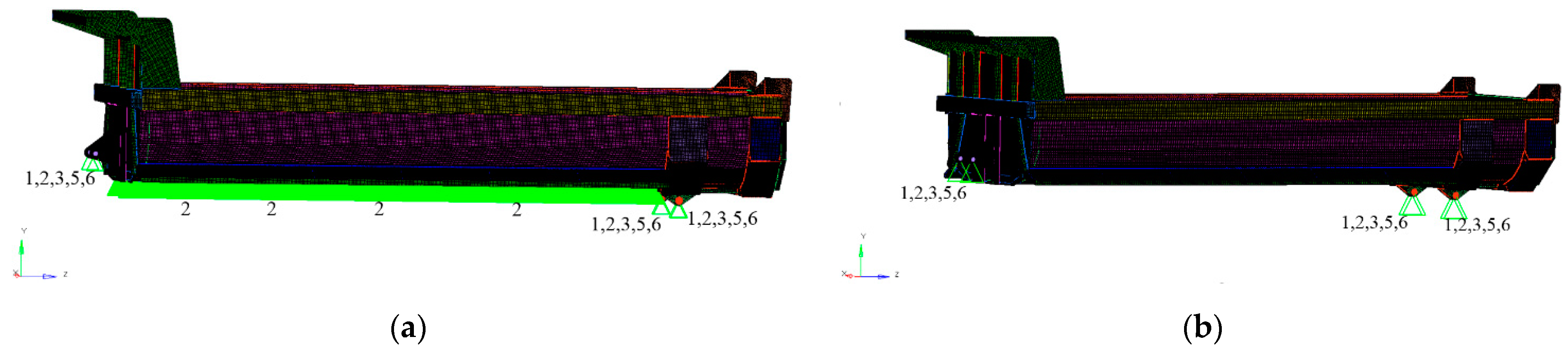
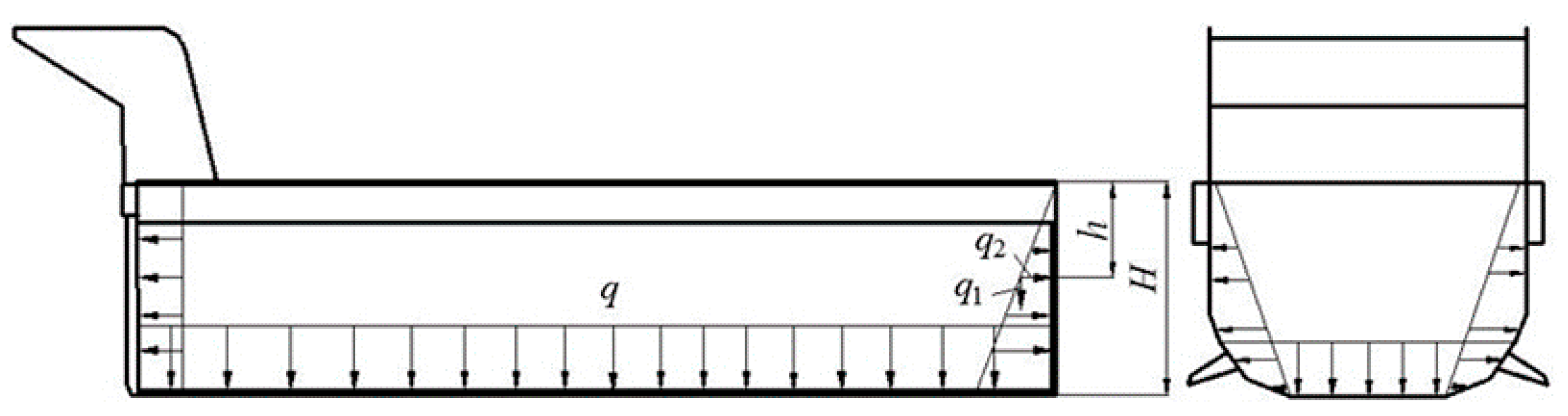
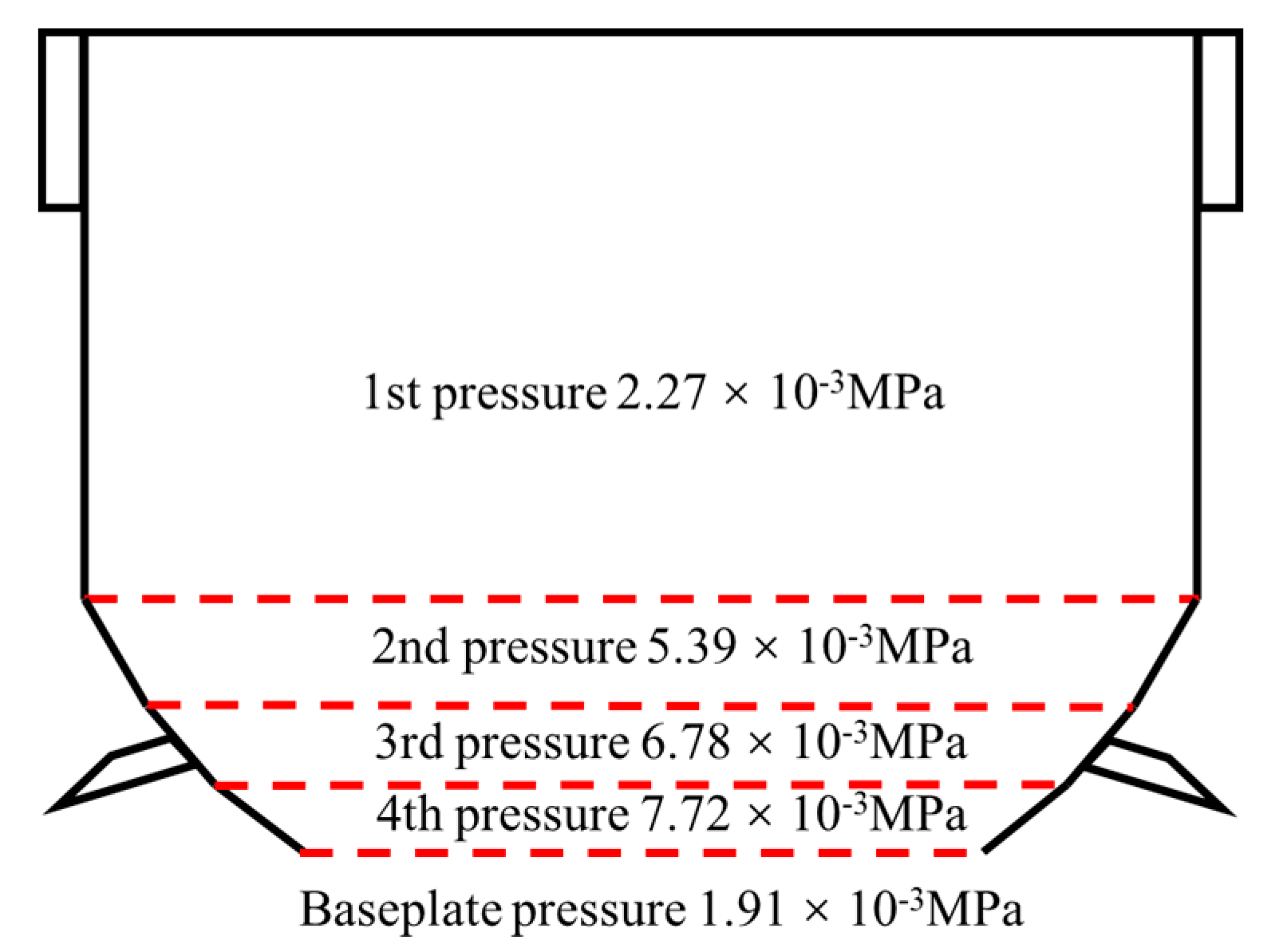
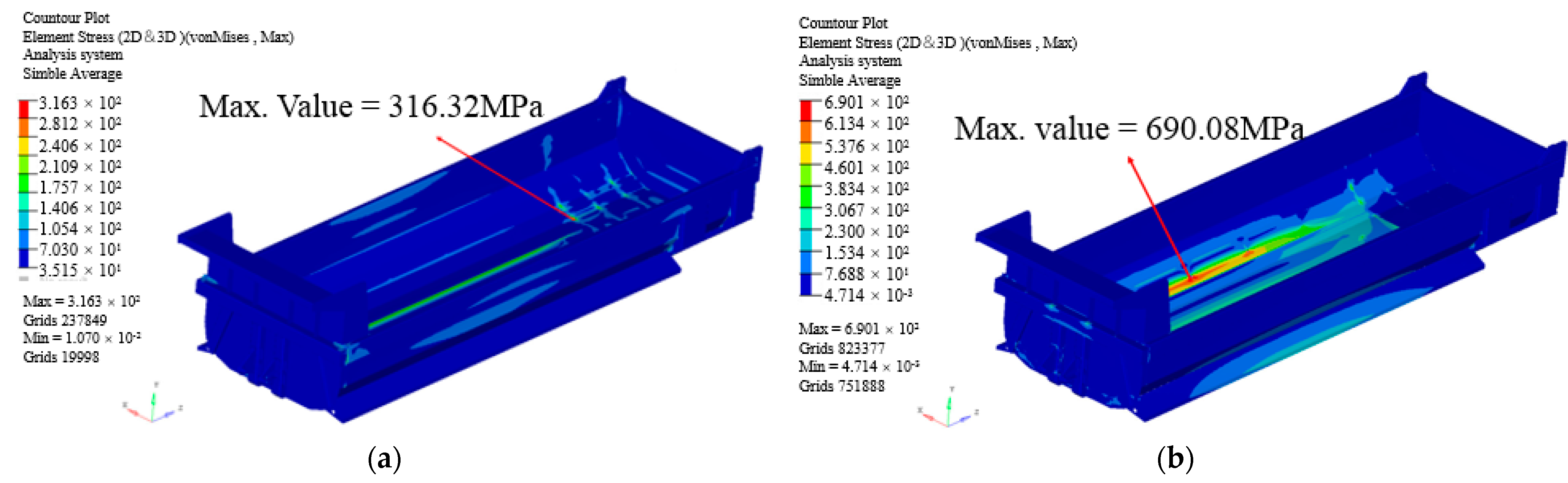
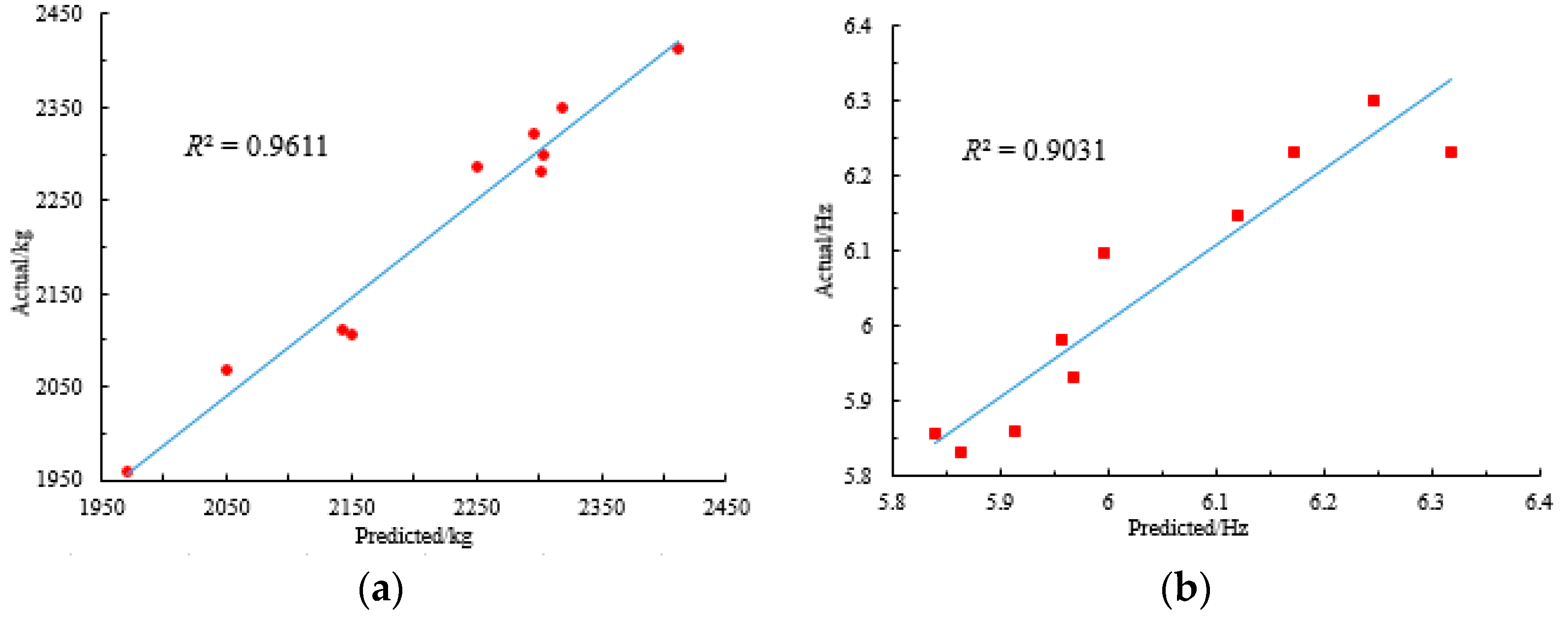
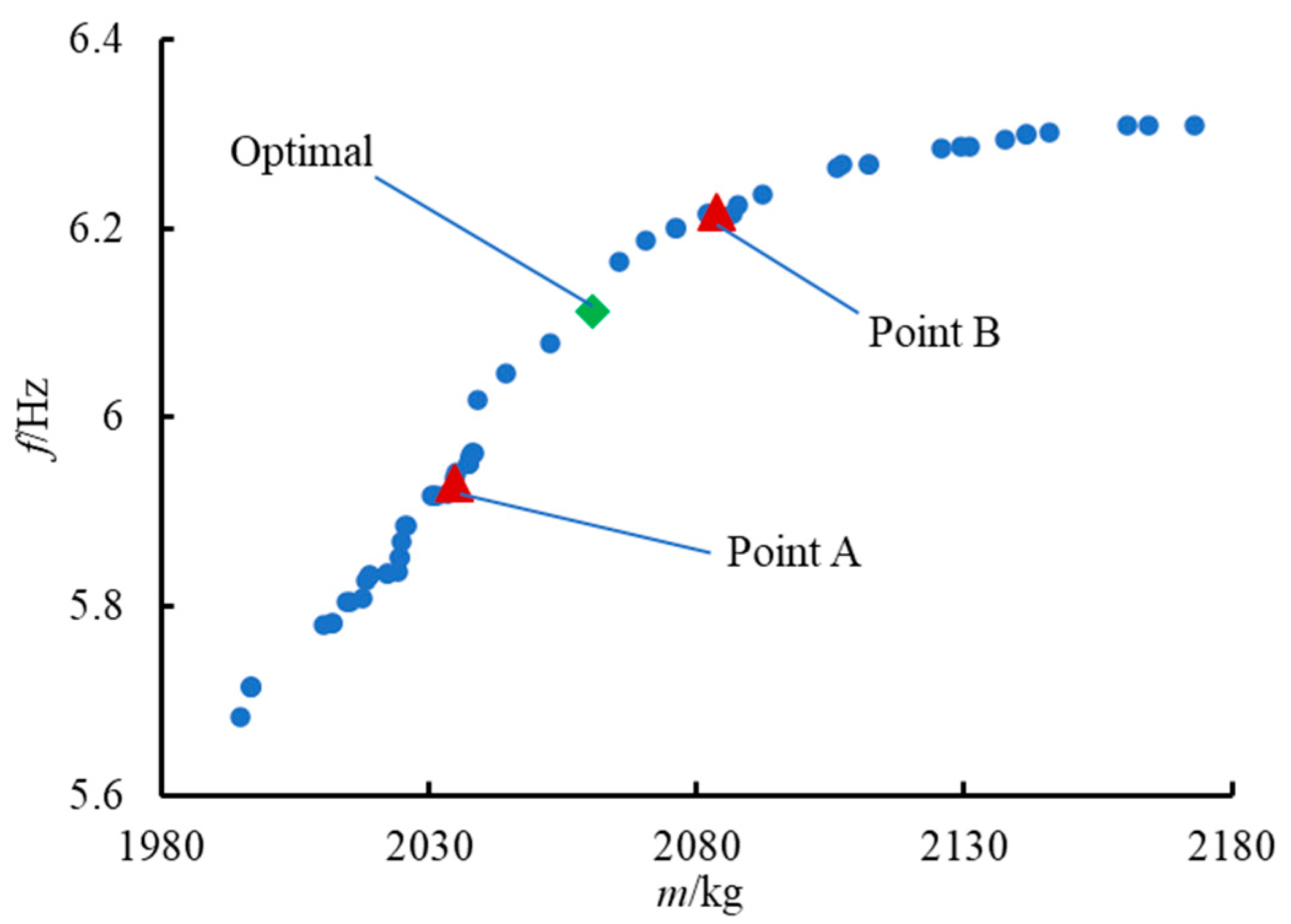
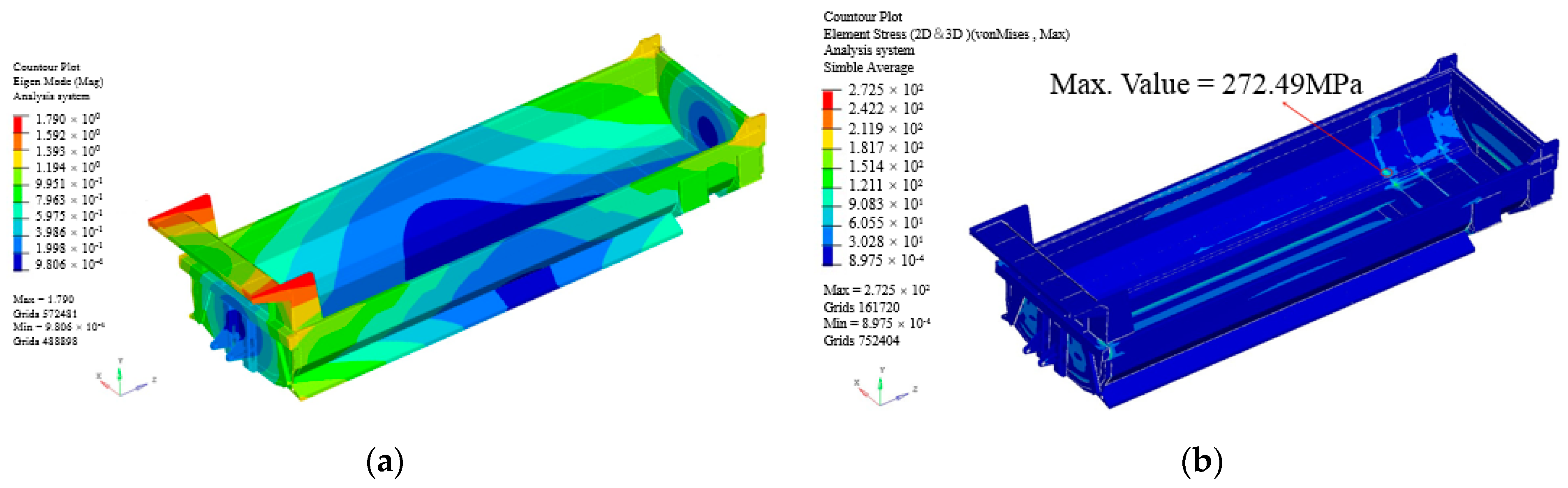
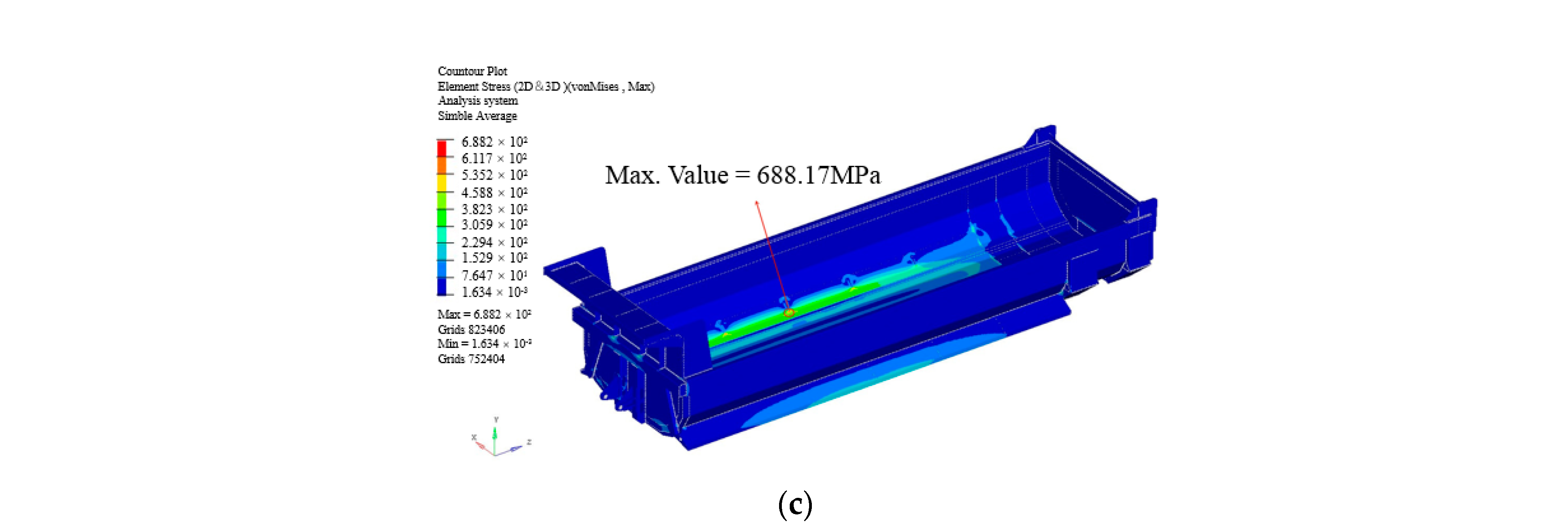
This paper proposes a multi-objective optimization method by integrating the Kriging surrogate model, NSGA-II algorithm and entropy weighted TOPSIS to optimize the dump truck carriage plate thickness, for realizing its lightweight design. Firstly, the finite element model of the U-carriage is developed to carry out its modal and strength analysis. The Kriging surrogate models for fitting the relationship of the design variables of plate thickness and the performance indexes of the U-carriage are constructed, with the samples generated by the optimal Latin Hypercube method. Then the multi-objective optimization of the U-carriage is modeled with the objective function of minimizing the weight and maximizing the first-order natural frequency, while considering the constraints of the maximum stress under the full load and lifting condition. The Pareto solutions are acquired by the NSGA-II algorithm. Finally, the optimal parameters of U-carriage are determined using entropy weighted TOPSIS method, so as to achieve weight reduction and performance improvement.
The rest of this paper is structured as follows. The next section explains some basic theories used for the proposed multi-objective optimization approach. In
Section 3, the finite element model of the dump truck carriage is established to calculate its performance. In
Section 4, the presented multi-objective optimization method is applied to perform the lightweight design of the carriage and the optimization results are discussed and analyzed. Finally, the main conclusions are outlined in
Section 5.
5. Conclusions
This paper proposed a multi-objective optimization approach integrating the NSGA-II algorithm and entropy weighted TOPSIS and its effectiveness was proved by its application to the lightweight design of the dump truck carriage. Firstly, the finite element model of the U-carriage was built to perform the static strength analysis and the modal analysis. The thickness of key plates of the carriage was taken as the design variable, and the optimal Latin Hypercube sampling technique was adopted to choose the randomly and uniformly distributed sample points in the design space. Then, the Kriging model was utilized to construct the numerical relationships between the design variables and the performance index of the dump truck carriage. On this basis, the NSGA-II algorithm was employed to carry out the multi-objective optimization of the lightweight design of the U-carriage for minimizing the mass while maximizing the first-order natural frequency, and the Pareto front was obtained. Finally, the entropy weighted TOPSIS approach was used to determine the optimal solution for lightweighting the carriage from the Pareto solutions. The optimization results indicate that the mass of the optimized carriage was reduced by 81 kg compared with the original carriage, achieving a mass reduction of 3.7%, while guaranteeing the performance to meet the design requirement. This proves that the proposed multi-objective optimization procedure could improve the optimization efficiency, and it provides a feasible method for the lightweight design of dump trucks.
The contribution of this paper is mainly reflected as follows. First, the Kriging surrogate model, instead of the finite element model, was used to perform the optimization, which can save the computation cost and improve the optimization efficiency. Second, the TOPSIS method provided a novel way to find the optimal solution from many Pareto solutions. It can help researchers or engineers to determine the optimal design of the optimization problem.
However, the above research still has some limitations. In this paper, the effectiveness of the proposed method is only proved by comparing the optimal design with the initial design. Although this optimization procedure can provide a technical reference for the development and design of the dump truck carriage, the potential for optimization has yet to be tapped.
Thus, future research could conduct a comparison between the proposed method and other optimization methods to demonstrate its superiority over other methods. Meanwhile, different optimization algorithms will be adopted to seek the Pareto solutions, to achieve a better reduction in mass.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}