
Formation Control of a Multi-Autonomous Underwater Vehicle Event-Triggered Mechanism Based on the Hungarian Algorithm


Abstract
:1. Introduction
2. Construction of AUV Feedback Linearization Model
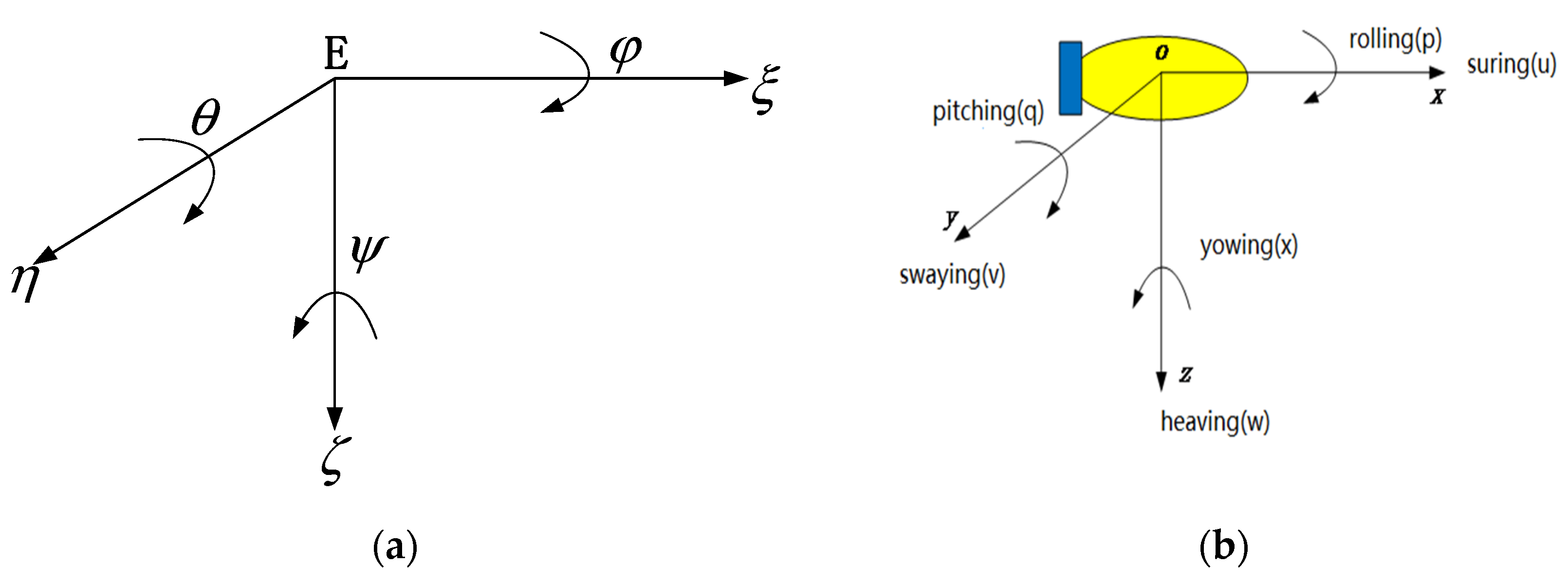
2.1. AUV Nonlinear Model
2.2. The Feedback Linearization Model of the AUV
3. Hungarian Algorithm
3.1. Construction of Cost Model
- 1.
- Building the model of path cost
- 2.
- Building the model of the communicating cost:
- 3.
- Communicating propagation loss model:
- 4.
- Additional model
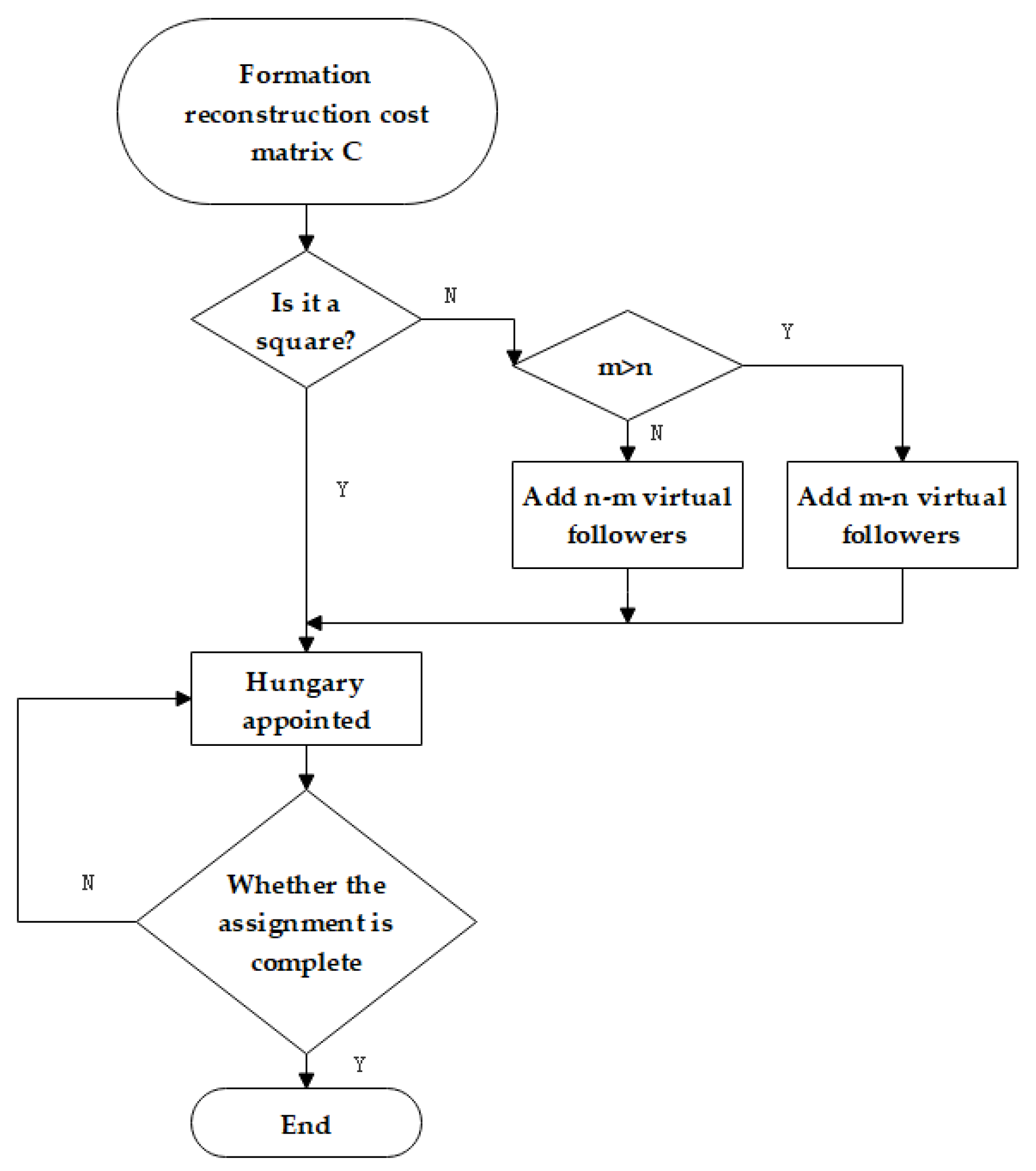
3.2. The Improvement of the Hungarian Algorithm
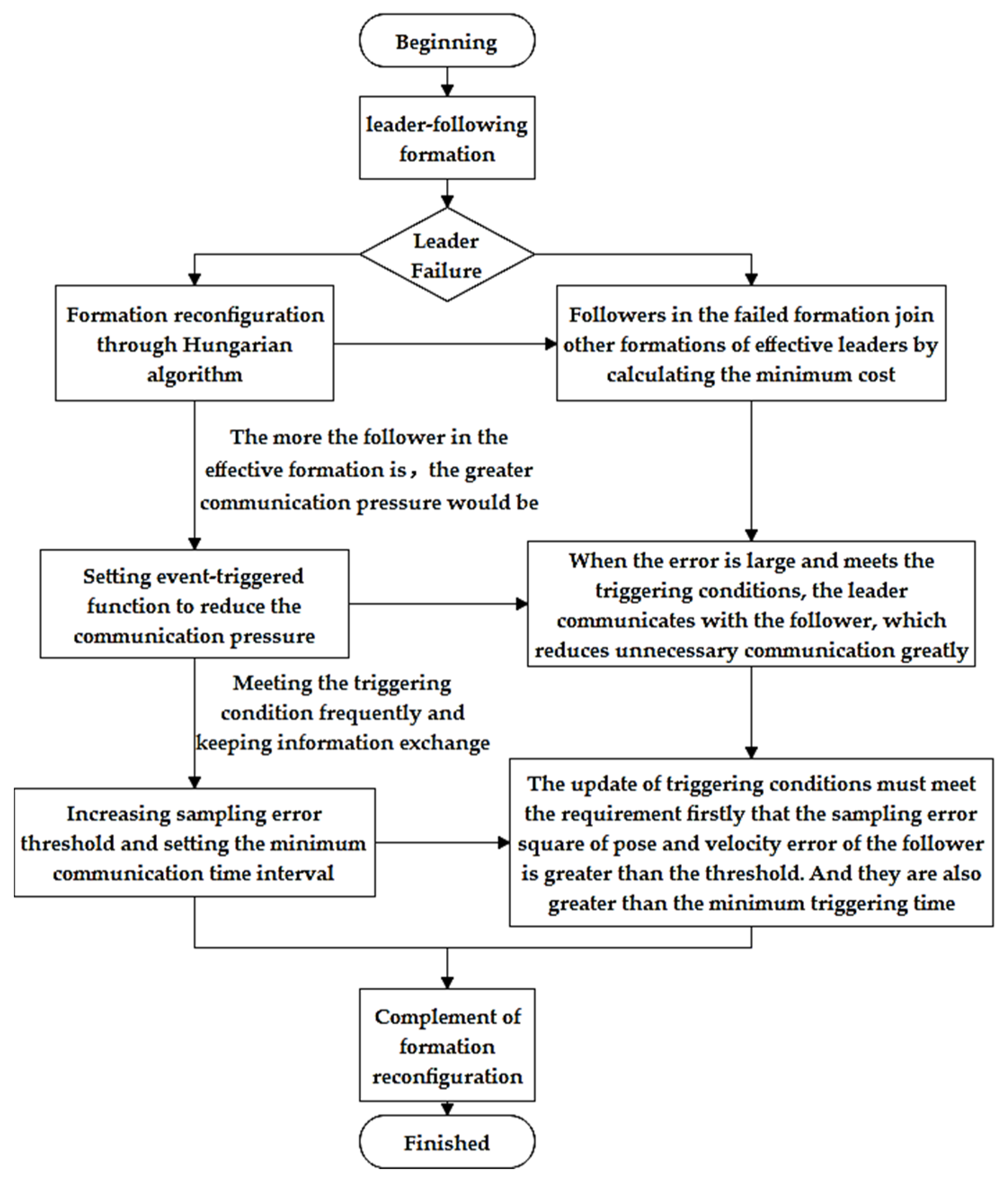
4. Formation Control under the Multi-AUV Event-Triggered Mechanism
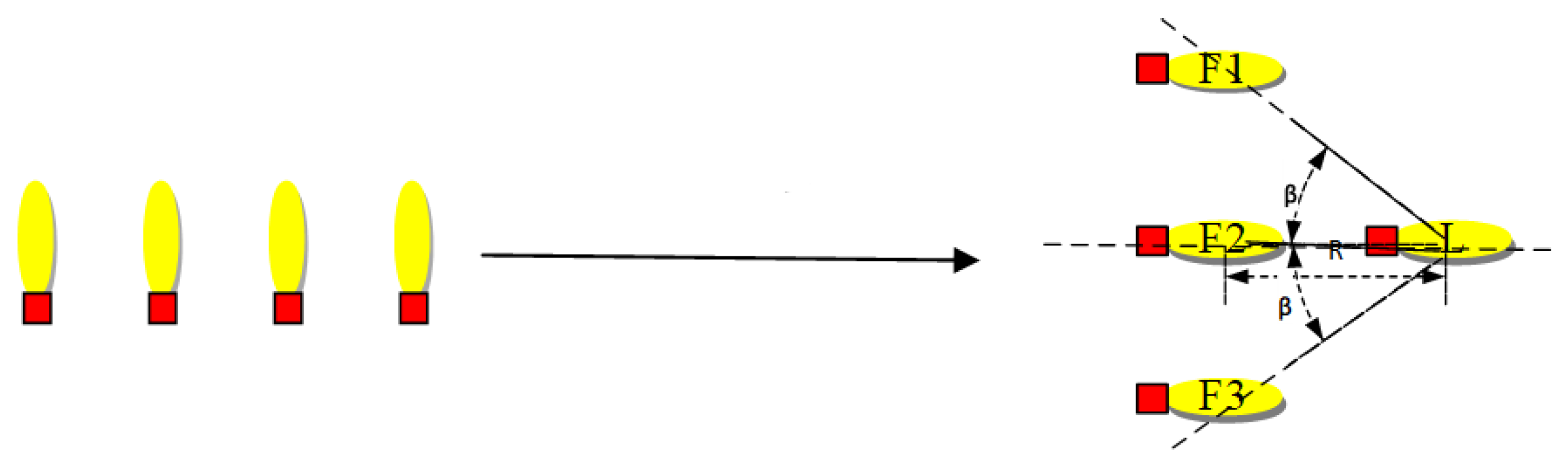
4.1. The Design of AUV Formation Controller
4.2. The Design of the Formation Reconfiguration Controller
4.3. Design of the Formation Controller under an Event-Triggered Mechanism
4.4. Analysis of Formation Stability
4.4.1. Analysis of Formation Controller Stability
4.4.2. Analysis of Formation Stability under and Event-Triggered Mechanism
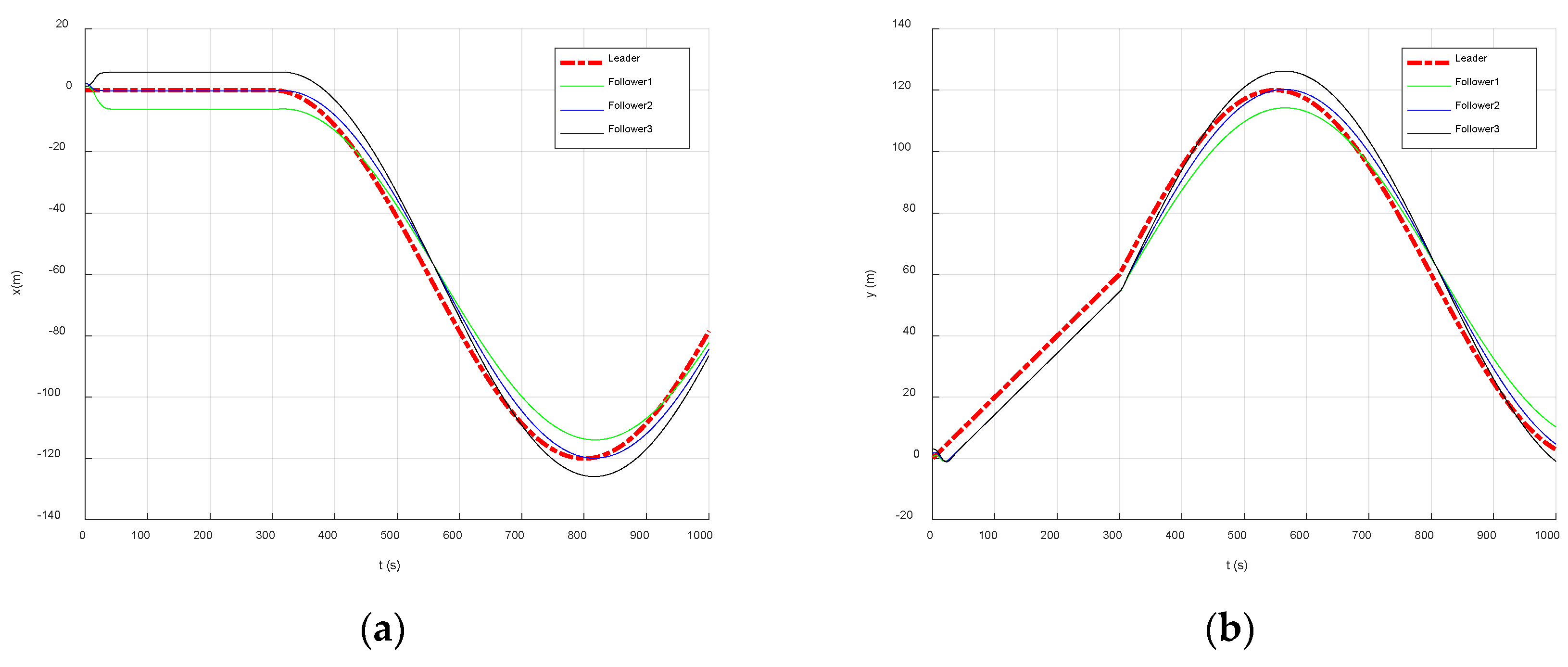
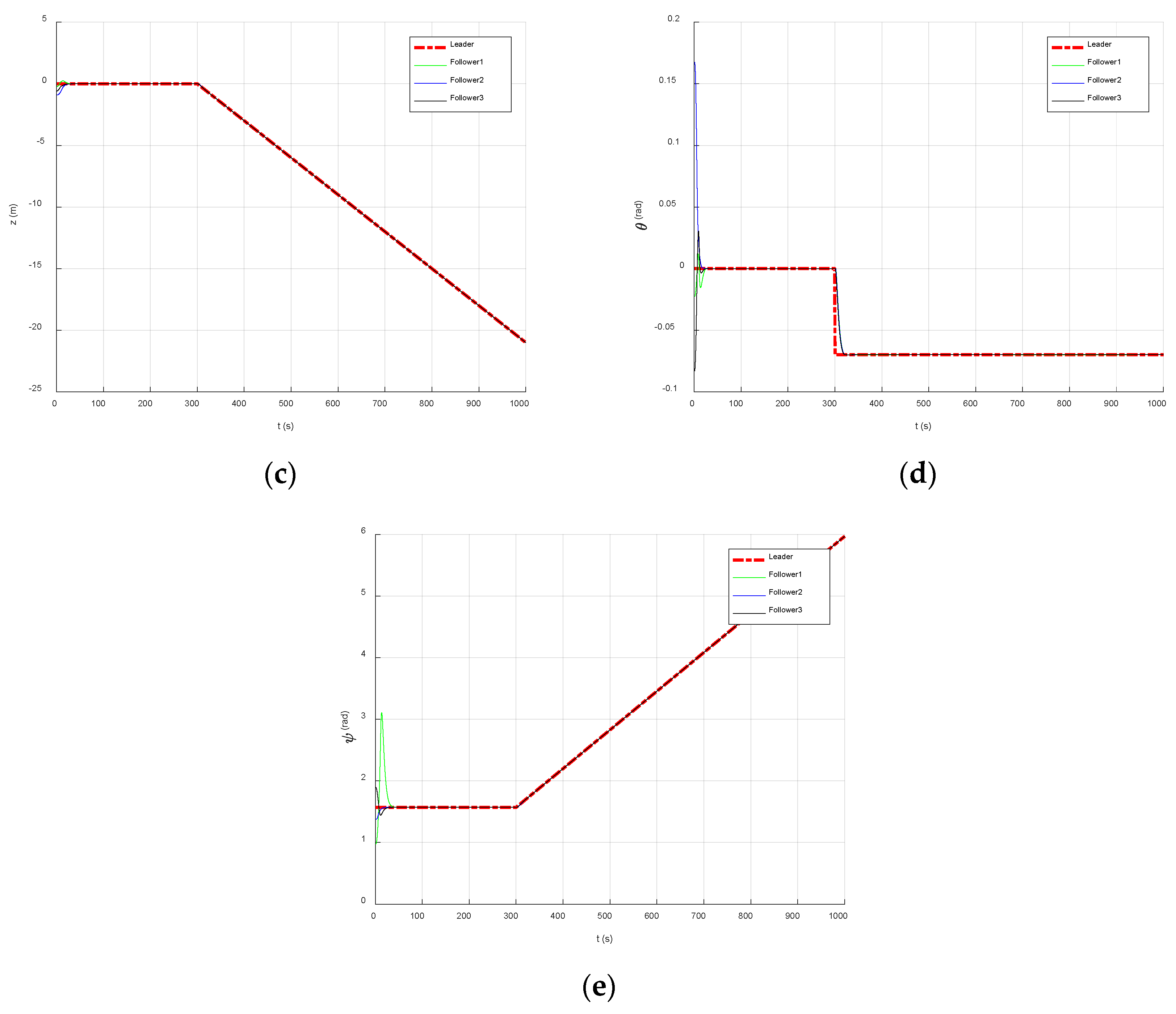
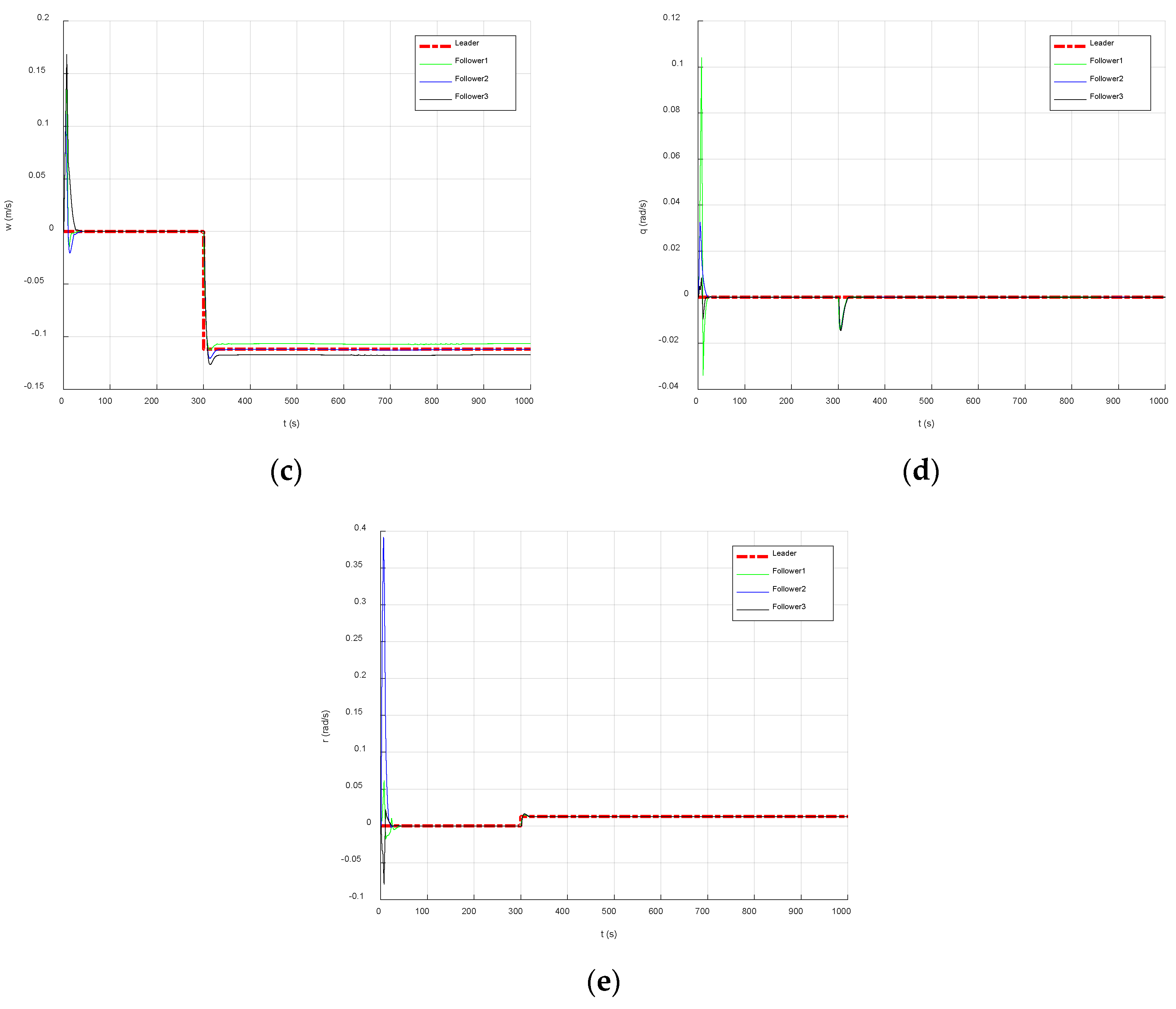
5. Simulation Verification and Analysis
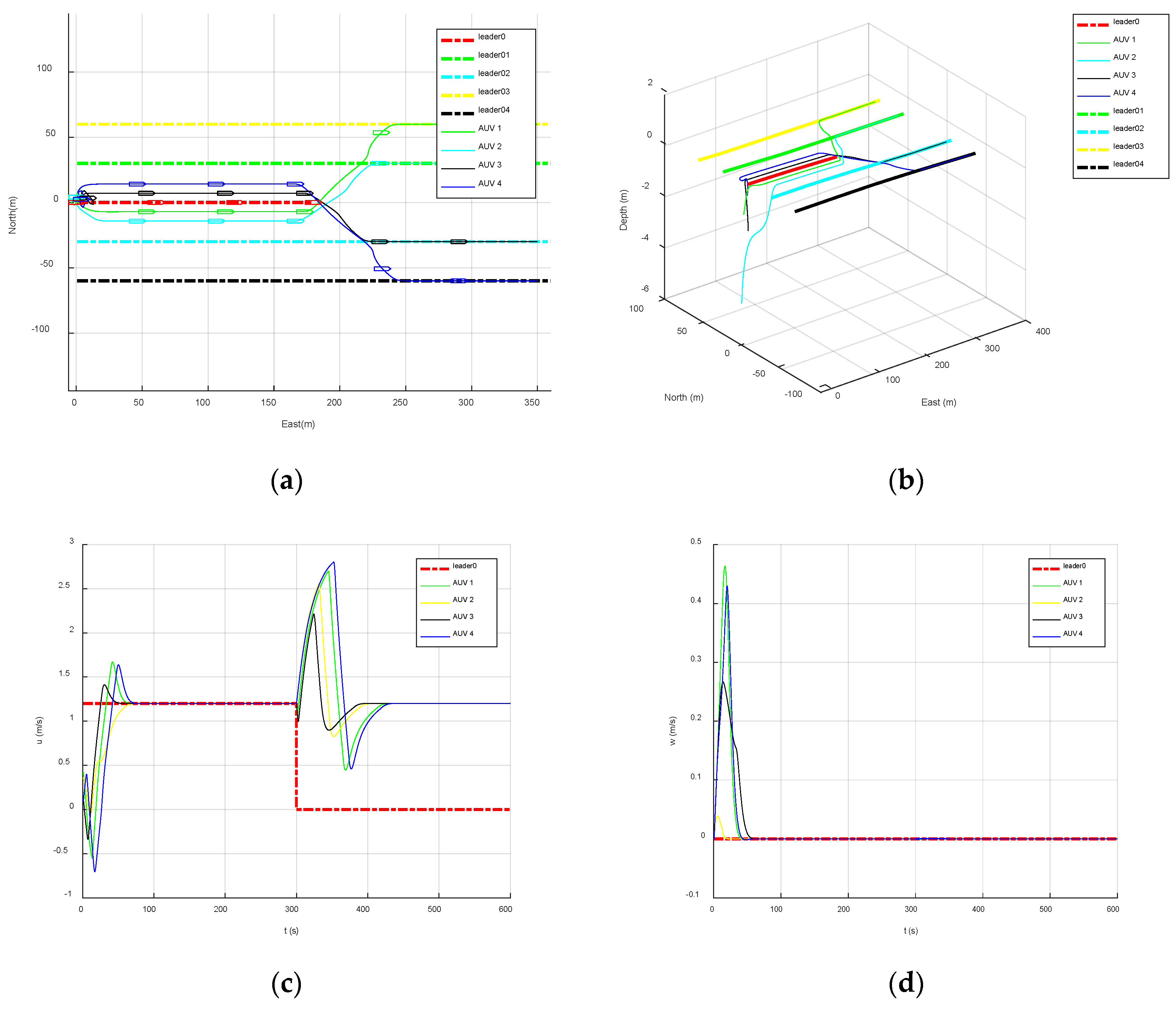
5.1. When the Number of Followers Is Equal to the Number of Effective Leaders
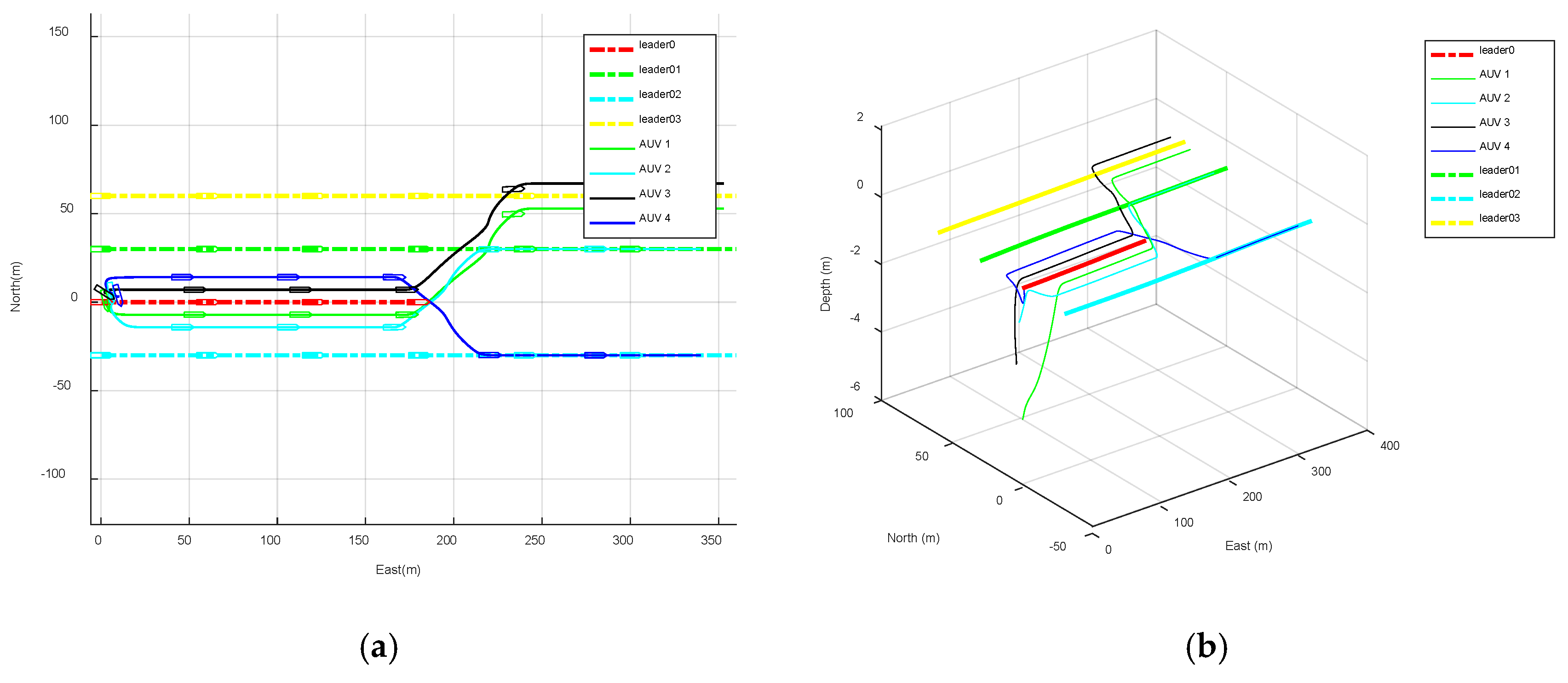
5.2. When the Number of Followers Is Less than the Number of Effective Leaders
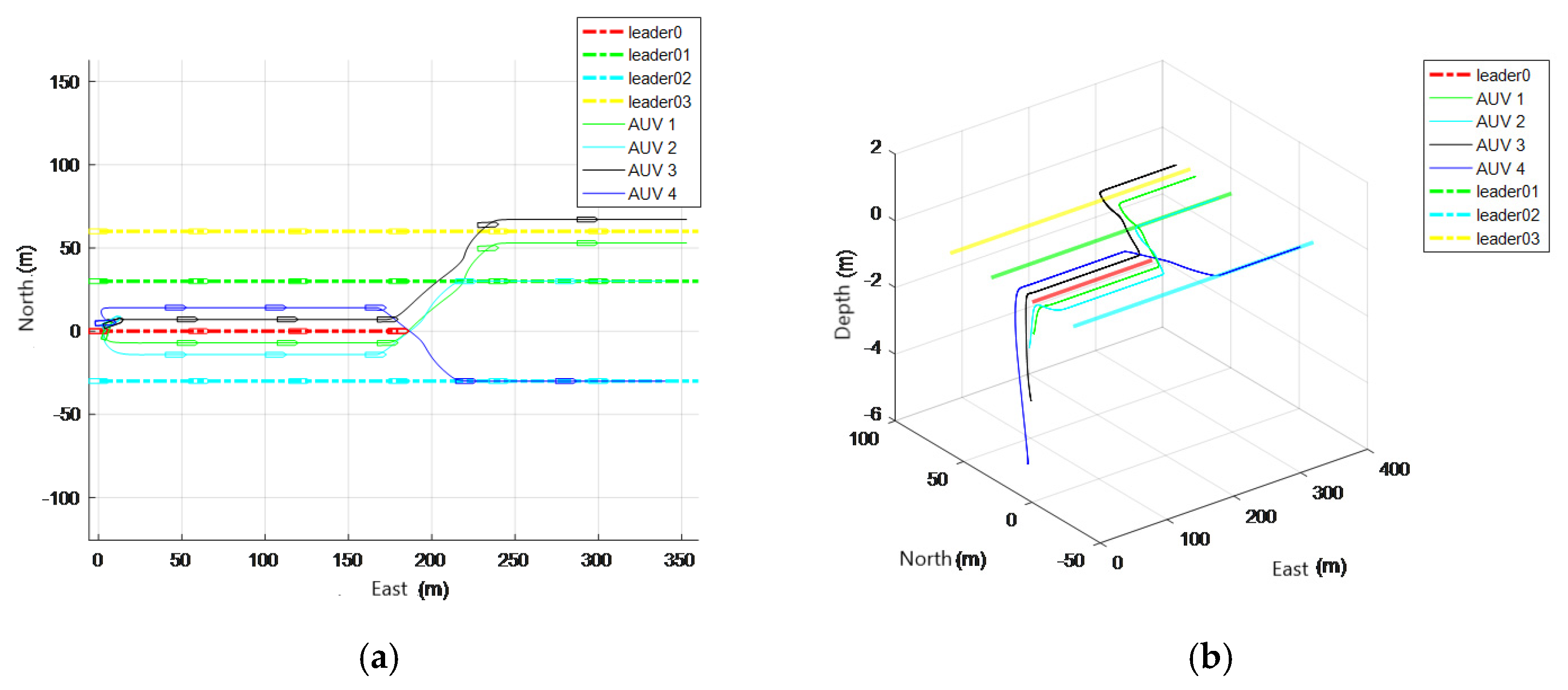
5.3. When the Number of Followers Is More than the Number of Effective Leaders
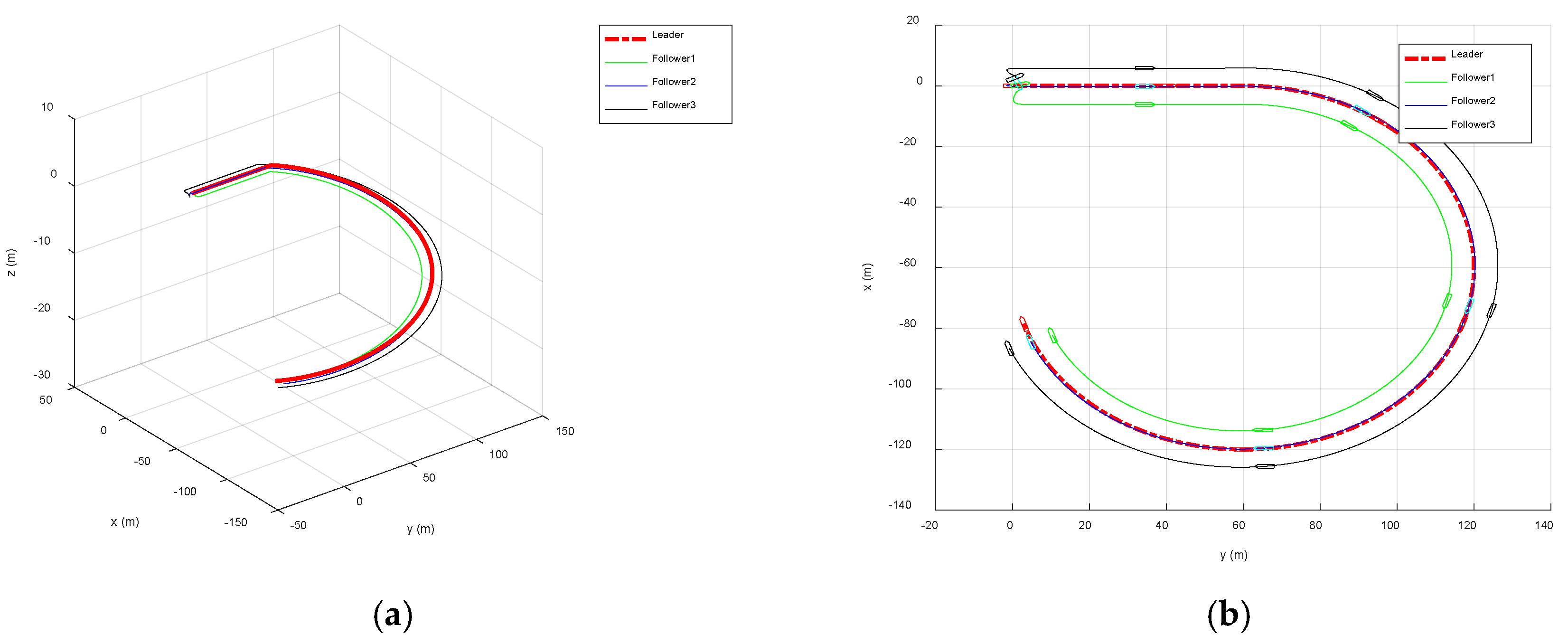
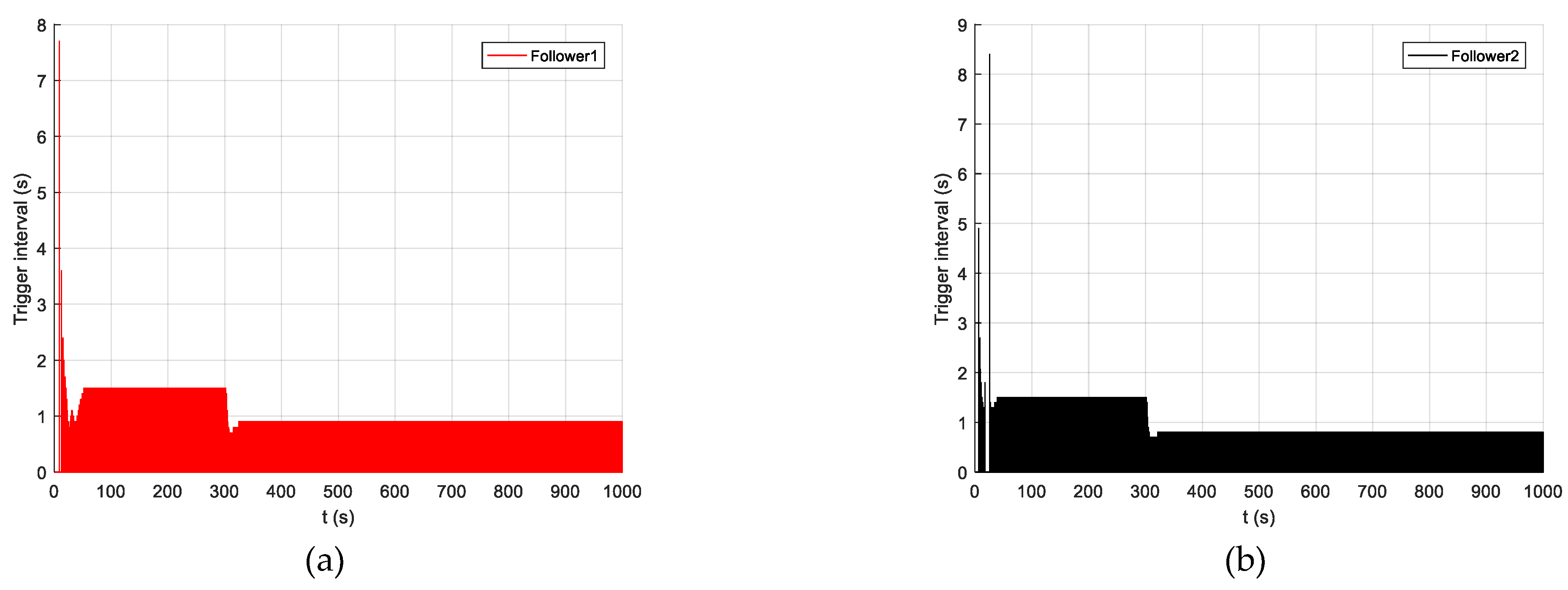
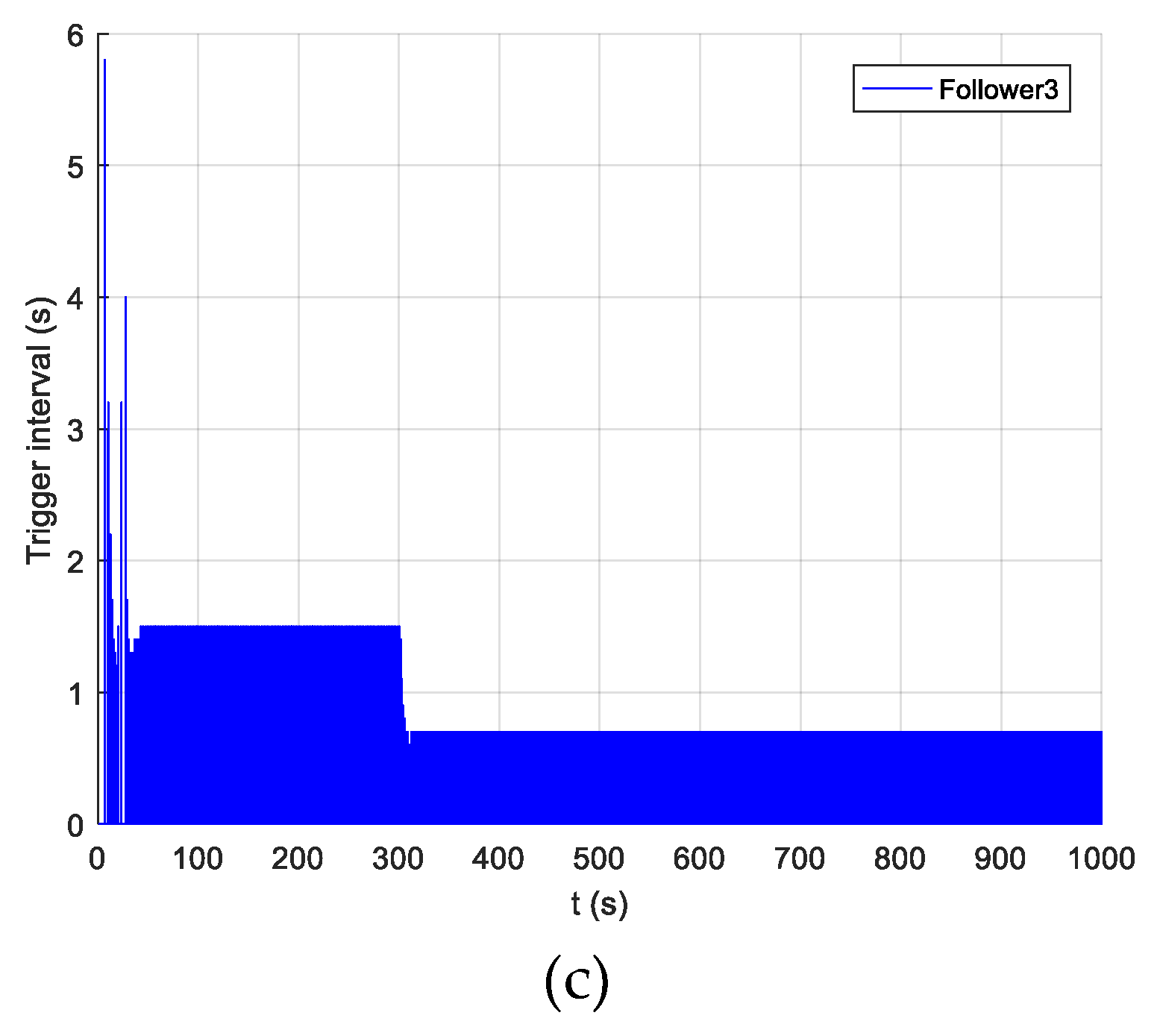
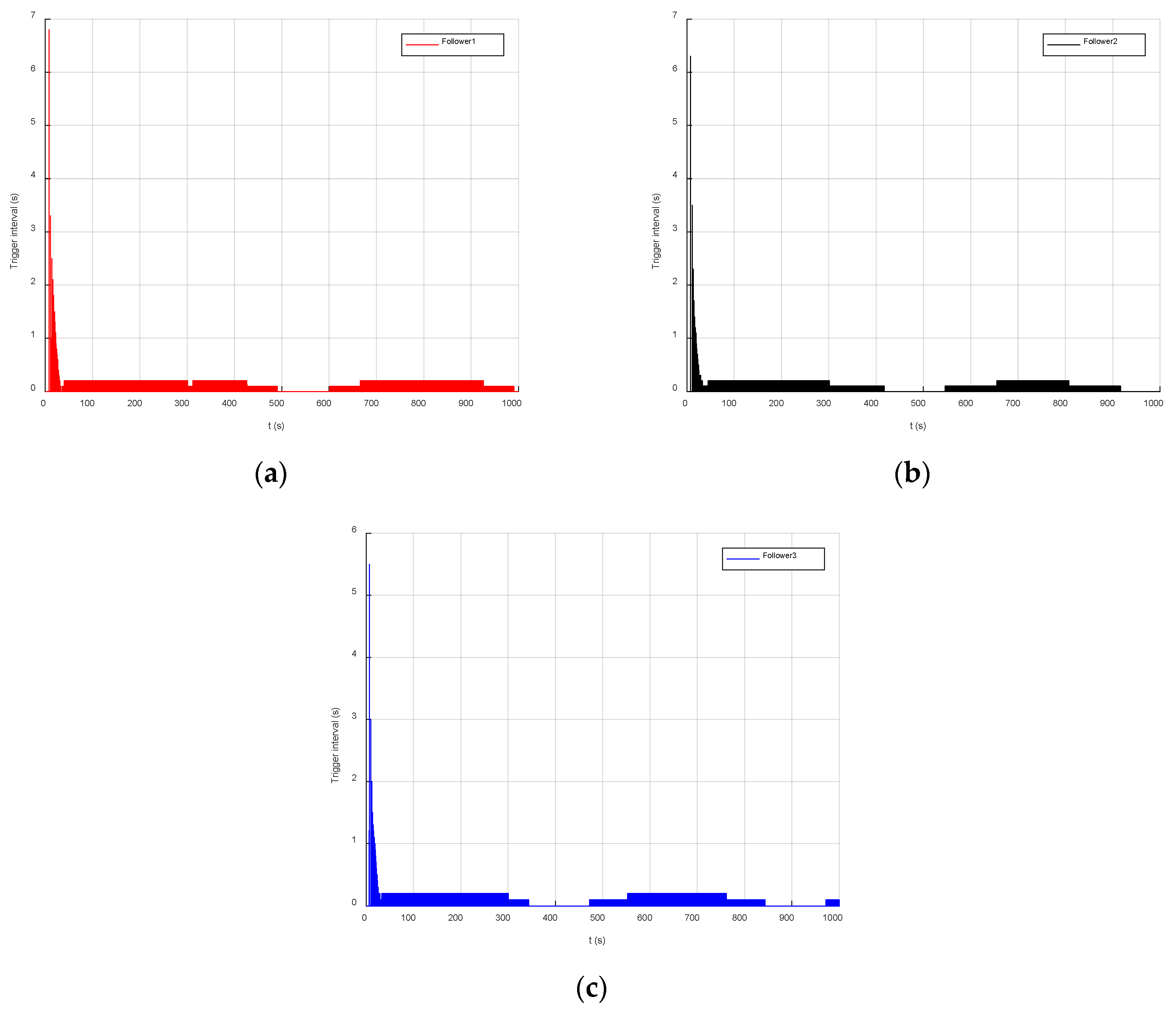
5.4. Simulation Verification and Analysis of the Event-Triggered Mechanism
6. Conclusions
- This article uses the full-drive AUV model, which reduces the difficulty of research in the model feedback linearization and controller design. The under-driven AUV model can be followed by related feedback linearization and controller design research.
- The formation constraint in this paper is the formation of the horizontal plane, therefore the formation constraint conditions of multiple AUVs in the three-dimensional space need to be studied in depth.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Singh, Y.; Bibuli, M.; Zereik, E.; Sharma, S.; Khan, A.; Sutton, R. A Novel Double Layered Hybrid Multi-Robot Framework for Guidance and Navigation of Unmanned Surface Vehicles in a Practical Maritime Environment. J. Mar. Sci. Eng. 2020, 8, 624. [Google Scholar] [CrossRef]
- Leonard, N.E.; Fiorelli, E. Virtual leaders, artificial potentials and coordinated control of groups. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; Volume 3, pp. 2968–2973. [Google Scholar]
- Liao, R.; Han, L.; Dong, X.; Li, Q.; Ren, Z. Finite-time formation-containment tracking for second-order multi-agent systems with a virtual leader of fully unknown input. Neurocomputing 2020, 415, 234–246. [Google Scholar] [CrossRef]
- Lalish, E.; Morgansen, K.A.; Tsukamaki, T. Formation Tracking Control using Virtual Structures and Deconfliction. In Proceedings of the IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006. [Google Scholar]
- Liu, Y.; Tong, M. An Application of Hungarian Algorithm to the Multi-Target Assignment. Fire Control Command Control 2002, 27, 34–37. [Google Scholar]
- Wang, H.; Shi, D.; Song, B. A dynamic role assignment formation control algorithm based on Hungarian method. In Proceedings of the IEEE Smartworld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People & Smart City Innovation, Guangzhou, China, 8–12 October 2018. [Google Scholar]
- Liang, J.; Long, Y.; Mei, Y.; Wang, T.; Jin, Q. A Distributed Intelligent Hungarian Algorithm for Workload Balance in Sensor-Cloud Systems Based on Urban Fog Computing. IEEE Access 2019, 7, 77649–77658. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Johansson, K.H. Event-triggered control for multi-agent systems. In Proceedings of the 48th IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 October 2009; pp. 7131–7136. [Google Scholar]
- Sariff, N.; Ismail, Z.H. Broadcast Event-Triggered Control Scheme for Multi-Agent Rendezvous Problem in a Mixed Communication Environment. Machines 2021, 11, 3785. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Cai, Y.; Sun, S.; Sun, J. Leader-Following Consensus for a Class of Nonlinear Multiagent Systems Under Event-Triggered and Edge-Event Triggered Mechanisms. IEEE Trans. Cybern. 2020, 99, 1–12. [Google Scholar] [CrossRef]
- Lin, Y.; Lin, Z.; Sun, Z. Distributed Event-Triggered Approach for Multi-Agent Formation Based on Cooperative Localization with Mixed Measurements. Machines 2021, 10, 2265. [Google Scholar] [CrossRef]
- He, N.; Qi, L.; Li, R.; Liu, Y. Design of a model predictive trajectory tracking controller for mobile robot based on the event-triggering mechanism. Math. Probl. Eng. 2021, 2021, 5573467. [Google Scholar] [CrossRef]
- Huang, H.W.; Huang, T.M.; Sheng, W.U. Leader-following consensus of second-order multi-agent systems via event-triggered control. Control Decis. 2016, 31, 835–841. [Google Scholar]
- Astrom, K.J.; Bernhardsson, B. Comparison of periodic and event based sampling for first-order stochastic system. In Proceedings of the 14th IFAC World Congress, Beijing, Chia, 5–9 July 1999; Volume 11, pp. 301–306. [Google Scholar]
- Arzen, K.E. A simple event-based PID controller. In Proceedings of the 14th IFAC World Congress, Beijing, Chia, 5–9 July 1999; Volume 18, pp. 423–428. [Google Scholar]
- Xing, L.; Wen, C.; Liu, Z.; Su, H.; Cai, J. Adaptive compensation for actuator failures with event-triggered input. Automatica 2017, 85, 129–136. [Google Scholar] [CrossRef]
- Byrnes, C.I.; Lindquist, A. Theory and Applications of Nonlinear Control Systems; Elsevier Science Pub. Co: New York, NY, USA, 1986. [Google Scholar]
- Zhao, H.; Zhang, C. An online-learning-based evolutionary many-objective algorithm. Inf. Sci. 2020, 509, 1–21. [Google Scholar] [CrossRef]
- Dulebenets, M.A. An Adaptive Polyploid Memetic Algorithm for Scheduling Trucks at a Cross-Docking Terminal. Inf. Sci. 2021, 565, 390–421. [Google Scholar] [CrossRef]
- Liu, Z.Z.; Wang, Y.; Huang, P.Q. A Many-Objective Evolutionary Algorithm with Angle-Based Selection and Shift-Based Density Estimation. Inf. Sci. 2017, 509, 400–419. [Google Scholar] [CrossRef] [Green Version]
- Pasha, J.; Dulebenets, M.A.; Kavoosi, M.; Abioye, O.F.; Wang, H.; Guo, W. An Optimization Model and Solution Algorithms for the Vehicle Routing Problem with a “Factory-in-a-Box”. IEEE Access 2020, 8, 134743–134763. [Google Scholar] [CrossRef]
- D’Angelo, G.; Pilla, R.; Tascini, C.; Rampone, S. A proposal for distinguishing between bacterial and viral meningitis using genetic programming and decision trees. Soft Comput. 2019, 23, 11775–11791. [Google Scholar] [CrossRef]
- Wu, S.; Xia, Y.; Luo, Y.; Lin, M. Event-Triggered Cooperative Formation Control for Multi-Agent System with Dynamic Role Assignment. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019. [Google Scholar]
- Kocic, M.; Brady, D.; Stojanovic, M. Sparse equalization for real-time digital underwater acoustic communications. In Proceedings of the Challenges of Our Changing Global Environment Conference, OCEANS ‘95 MTS/IEEE, San Diego, CA, USA, 9–12 October 1995; pp. 1417–1422. [Google Scholar]
- Su, B.; Wang, H.; Wang, Y.; Gao, J. Fixed-time formation of AUVs with disturbance via event-triggered control. Int. J. Control Autom. Syst. 2021, 19, 1505–1518. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Leader 0 | Leader 01 | Leader 02 | Leader 03 | |
|---|---|---|---|---|
| 0 | 30 | −30 | 60 | |
| 0.6 t | 0.6 t | 0.6 t | 0.6 t | |
| 0 | 0 | 0 | 0 |
| Leader | UUV 1 | UUV 2 | UUV 3 | UUV 4 |
|---|---|---|---|---|
| Leader 01 | 23.0909 | 20.6316 | 28.3197 | 28.9923 |
| Leader 02 | 27.9010 | 22.9578 | 23.5096 | 23.6661 |
| Leader 03 | 6.5087 | 6.4433 | 11.2257 | 18.9076 |
| Leader 04 | 10.8070 | 12.8731 | 6.9274 | 5.5913 |
| Leader | UUV 1 | UUV 2 | UUV 3 |
|---|---|---|---|
| Leader 01 | 12.0184 | 17.3403 | 26.7559 |
| Leader 02 | 10.2083 | 26.6665 | 20.9458 |
| Leader 03 | 22.6007 | 5.2655 | 10.6619 |
| Leader 04 | 14.3024 | 16.5818 | 9.3635 |
| Leader | UUV 1 | UUV 2 | UUV 3 | UUV 4 |
|---|---|---|---|---|
| Leader 01 | 23.5843 | 19.6624 | 29.6931 | 29.9375 |
| Leader 02 | 28.7509 | 26.9014 | 24.5265 | 20.6985 |
| Leader 03 | 13.9954 | 18.5044 | 19.5851 | 24.6031 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Zhang, Y.; Li, W. Formation Control of a Multi-Autonomous Underwater Vehicle Event-Triggered Mechanism Based on the Hungarian Algorithm. Machines 2021, 9, 346. https://doi.org/10.3390/machines9120346
Li J, Zhang Y, Li W. Formation Control of a Multi-Autonomous Underwater Vehicle Event-Triggered Mechanism Based on the Hungarian Algorithm. Machines. 2021; 9(12):346. https://doi.org/10.3390/machines9120346
Chicago/Turabian StyleLi, Juan, Yanxin Zhang, and Wenbo Li. 2021. "Formation Control of a Multi-Autonomous Underwater Vehicle Event-Triggered Mechanism Based on the Hungarian Algorithm" Machines 9, no. 12: 346. https://doi.org/10.3390/machines9120346