
Drawing System with Dobot Magician Manipulator Based on Image Processing

Abstract
:1. Introduction
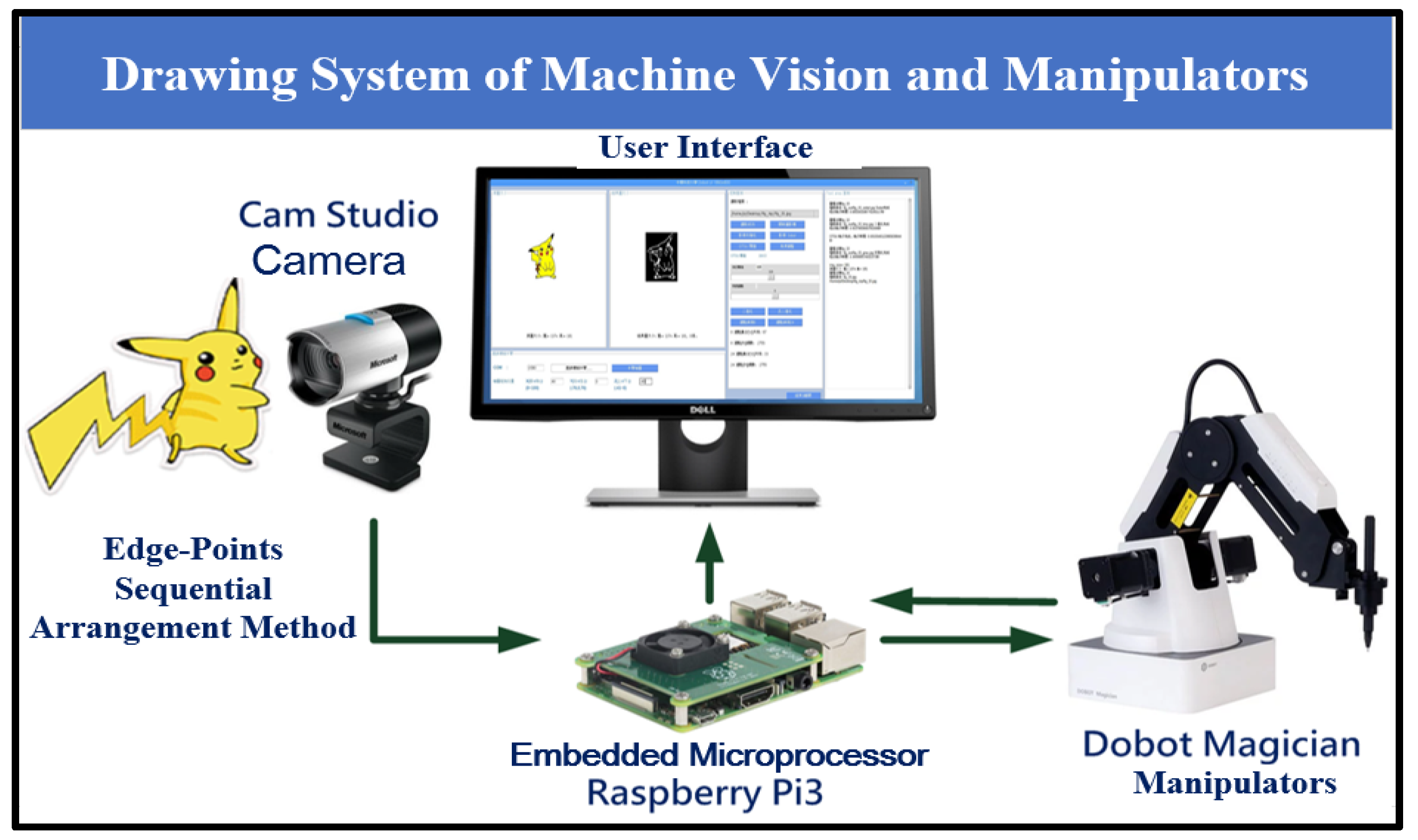
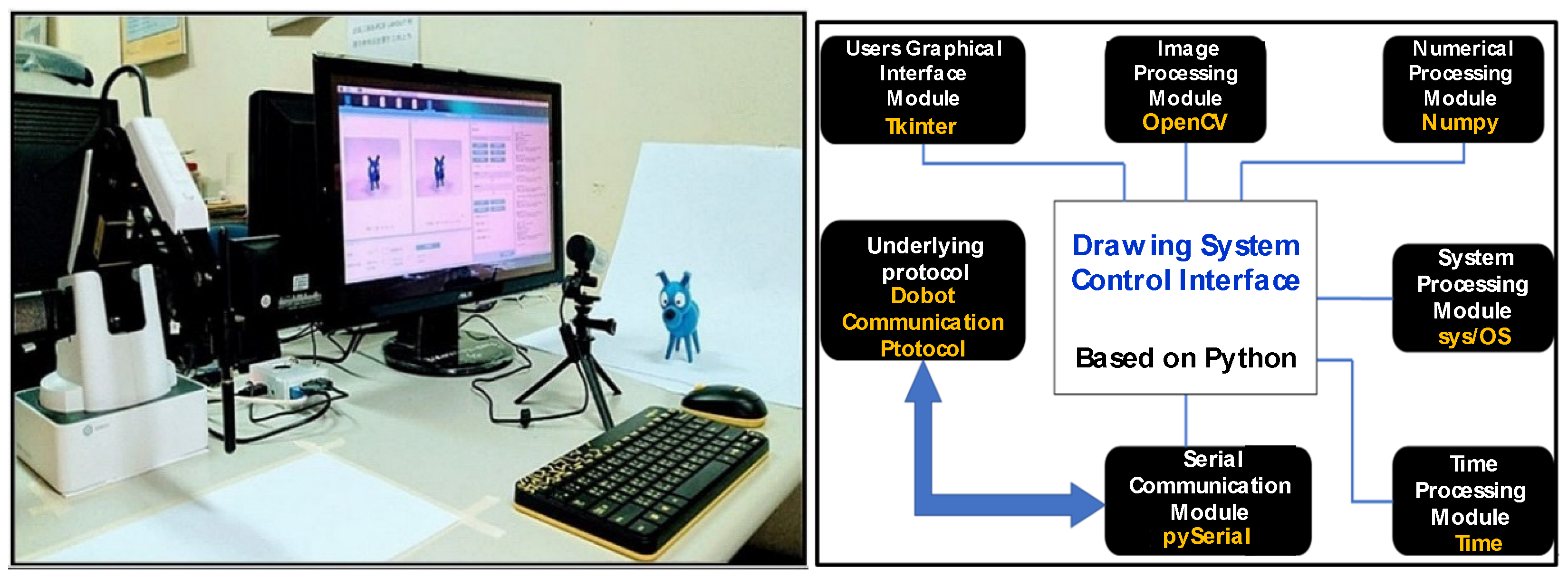
2. System Architecture
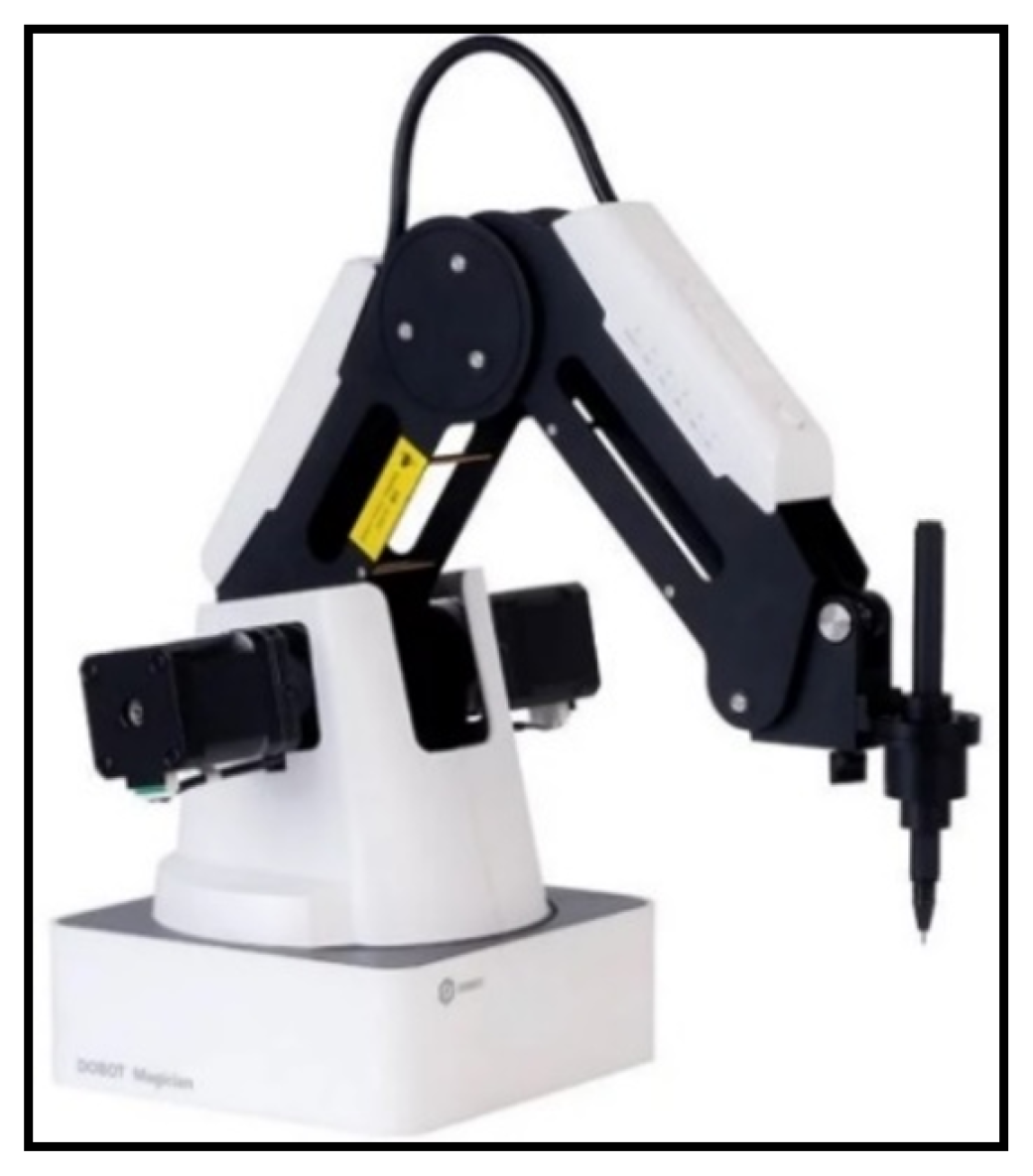
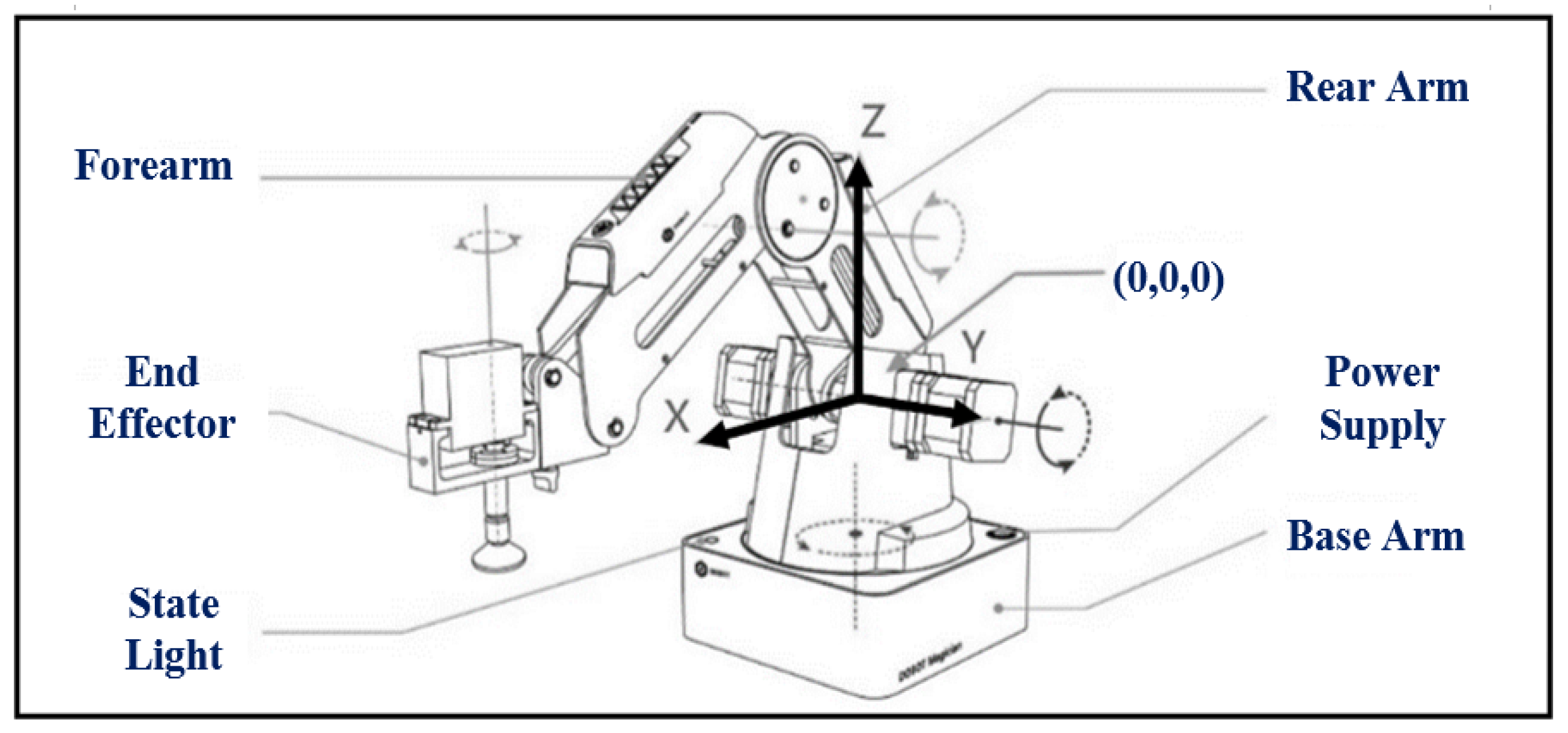
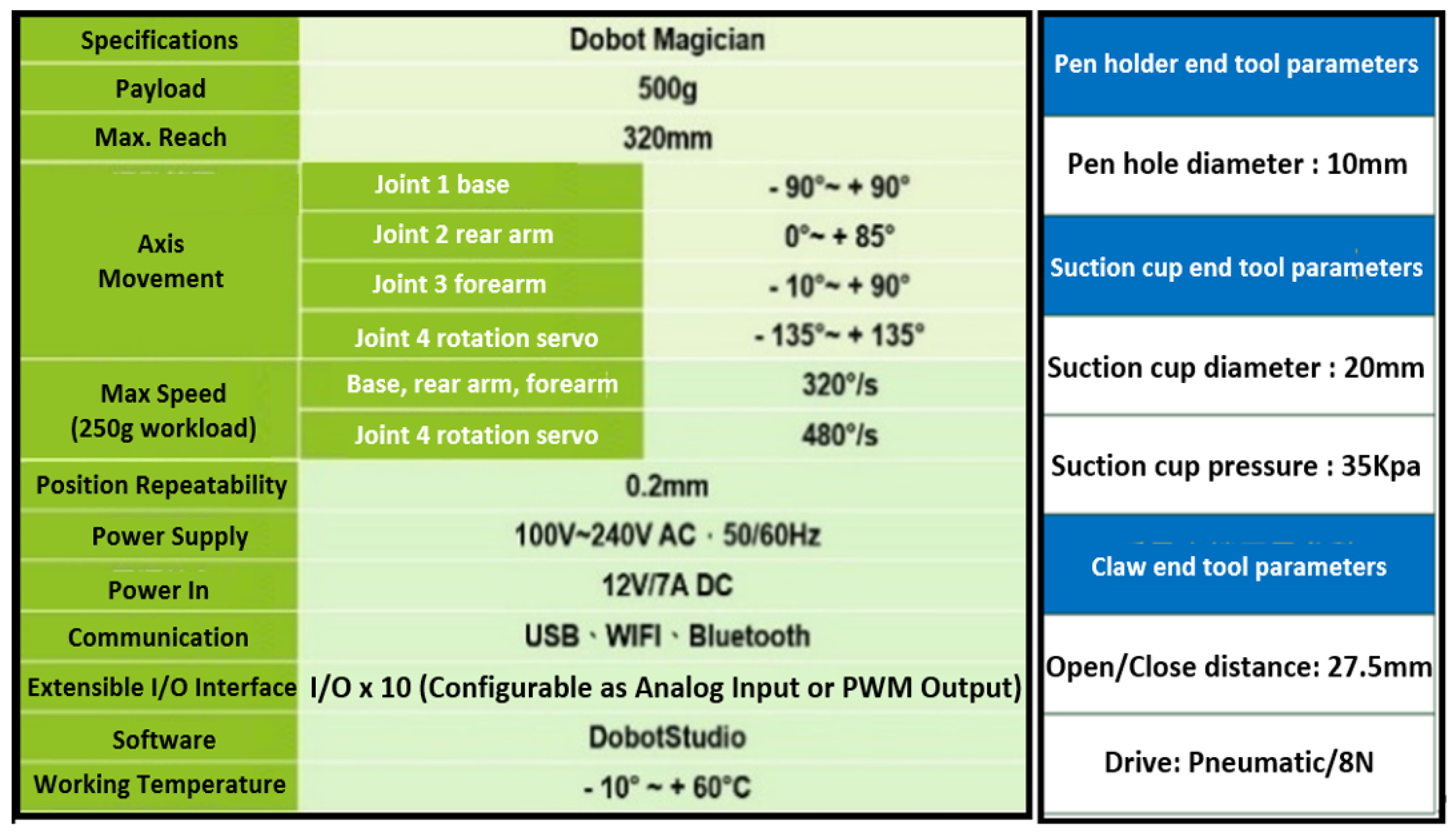
2.1. Specifications of Dobot Magician
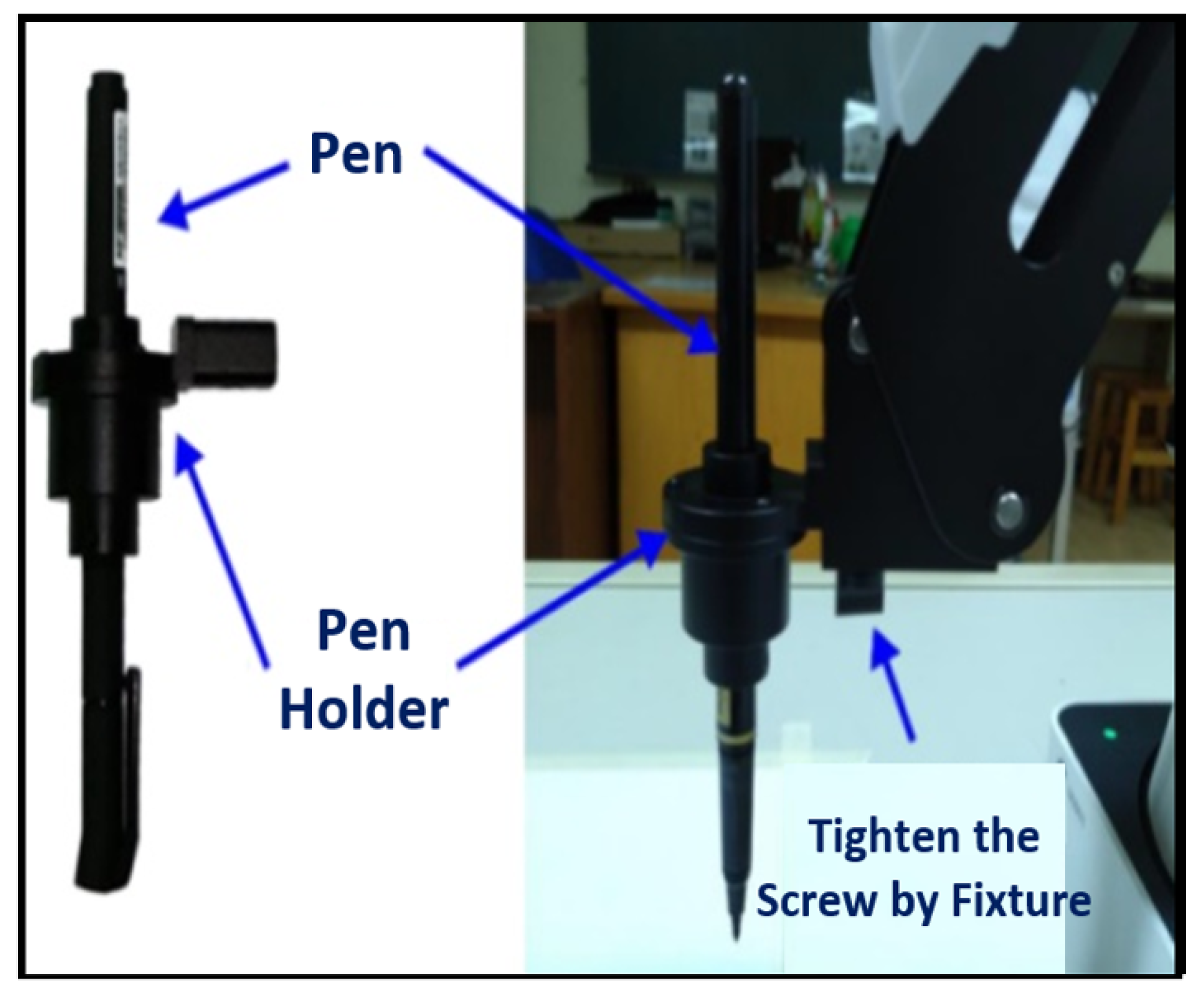
2.2. Writing-and-Drawing Module
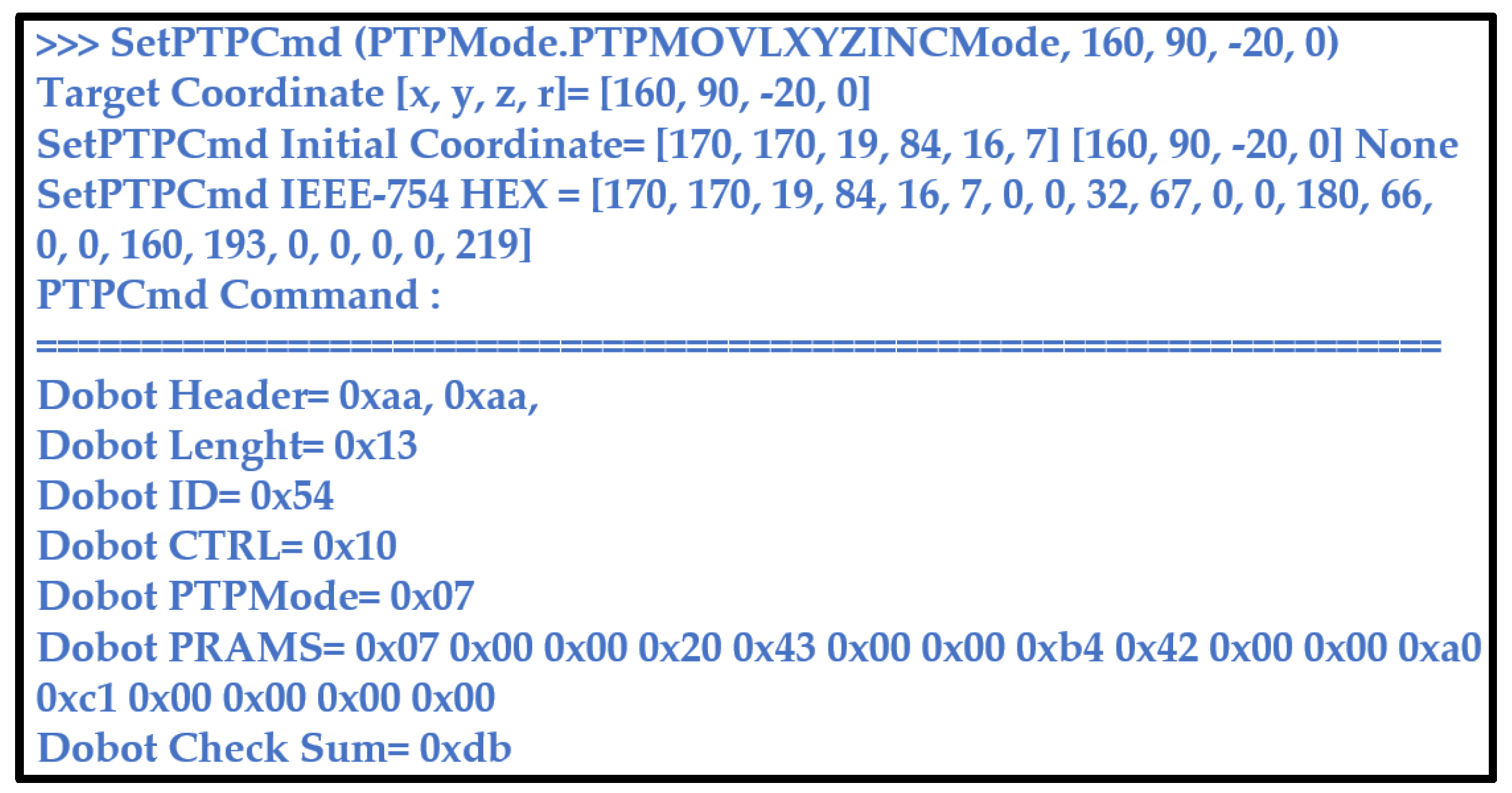
2.3. Underlying Communication Protocol
2.4. Camera Lens
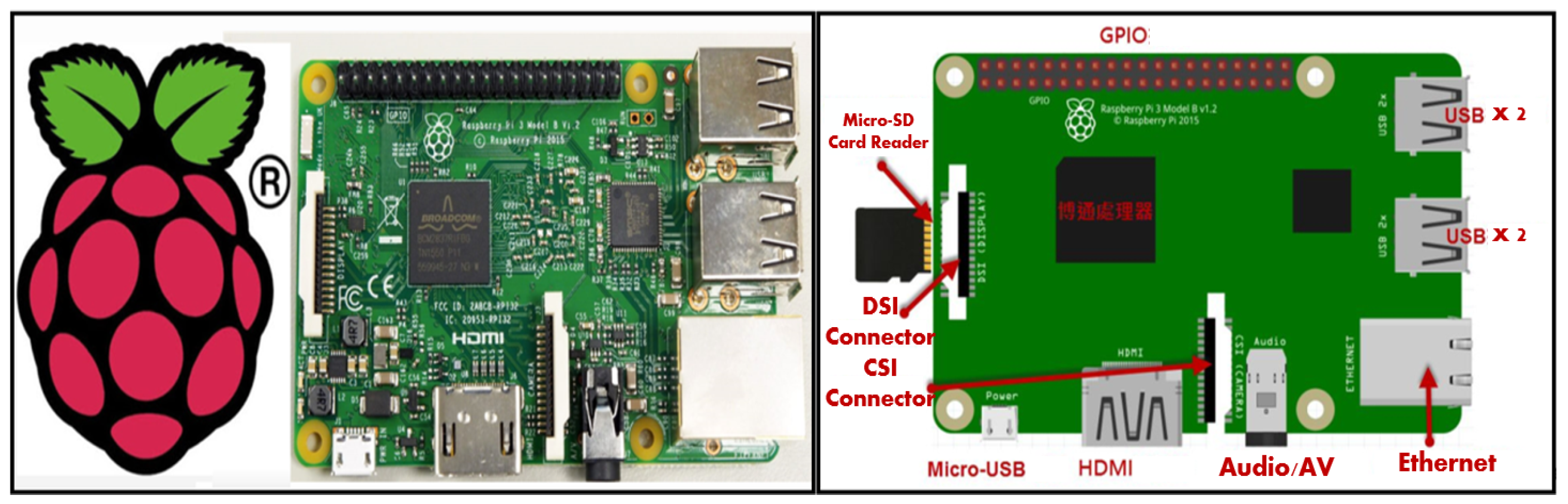
2.5. Embedded Microprocessor
3. Machine-Vision Image Processing
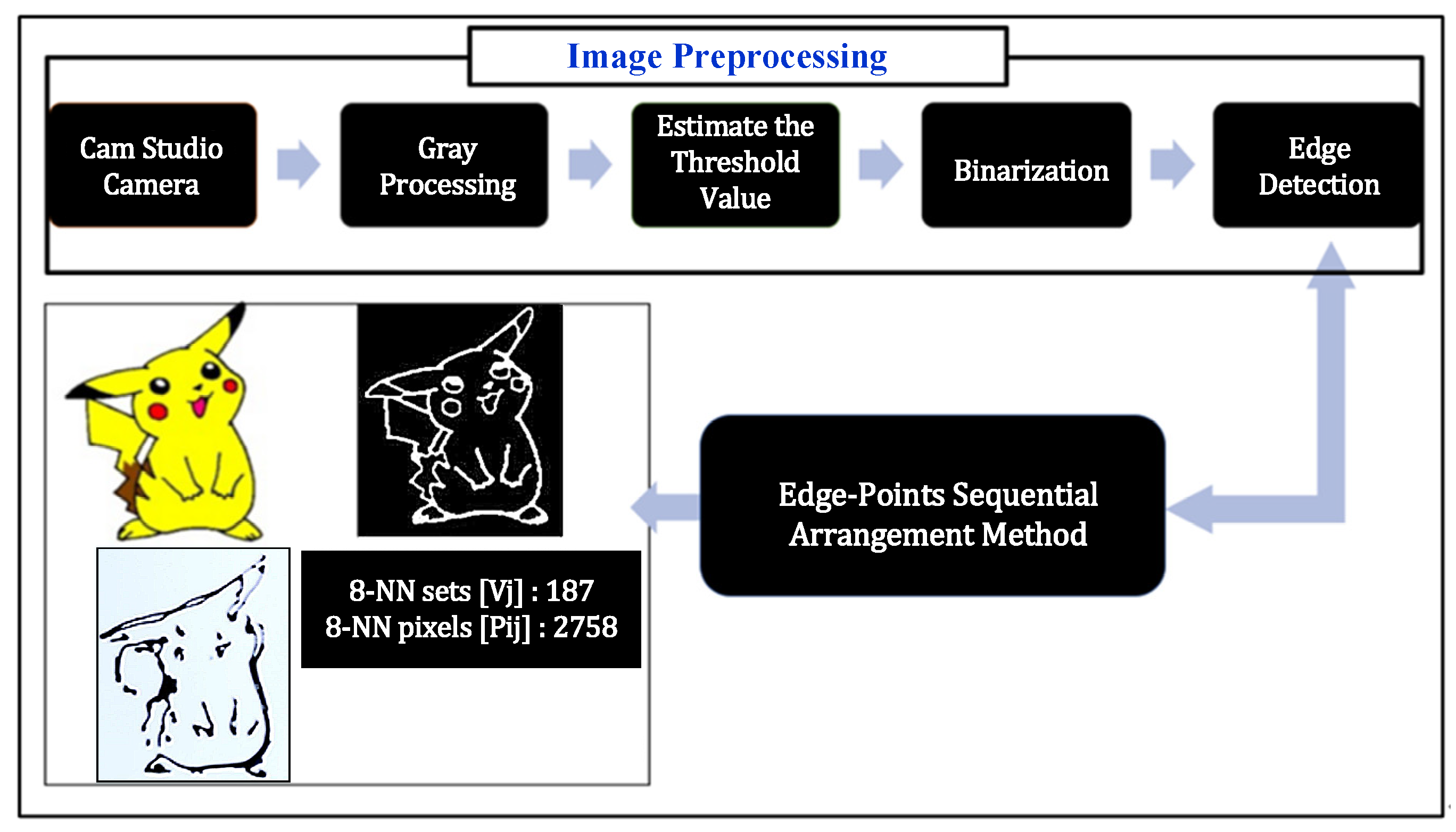
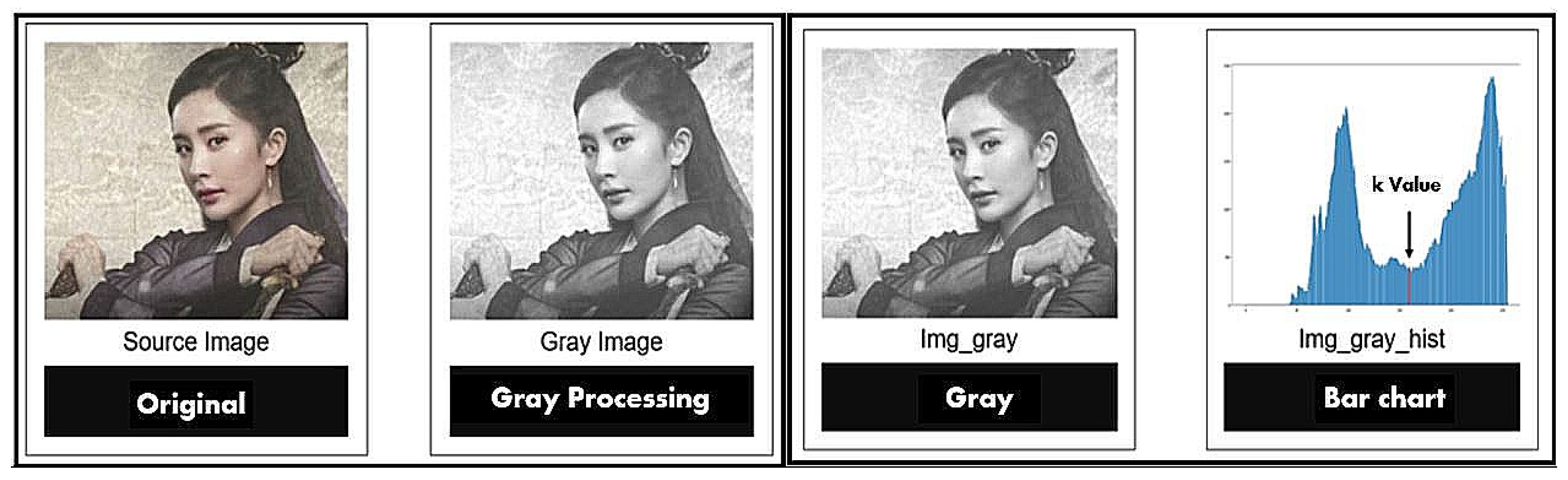
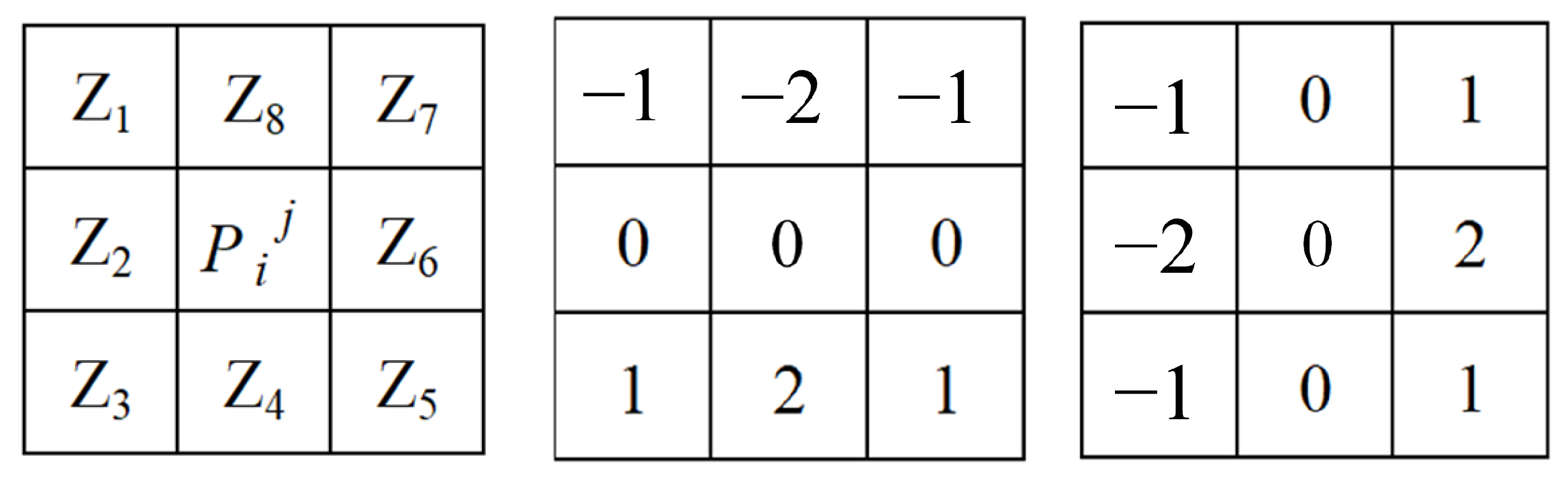
3.1. Image Preprocessing
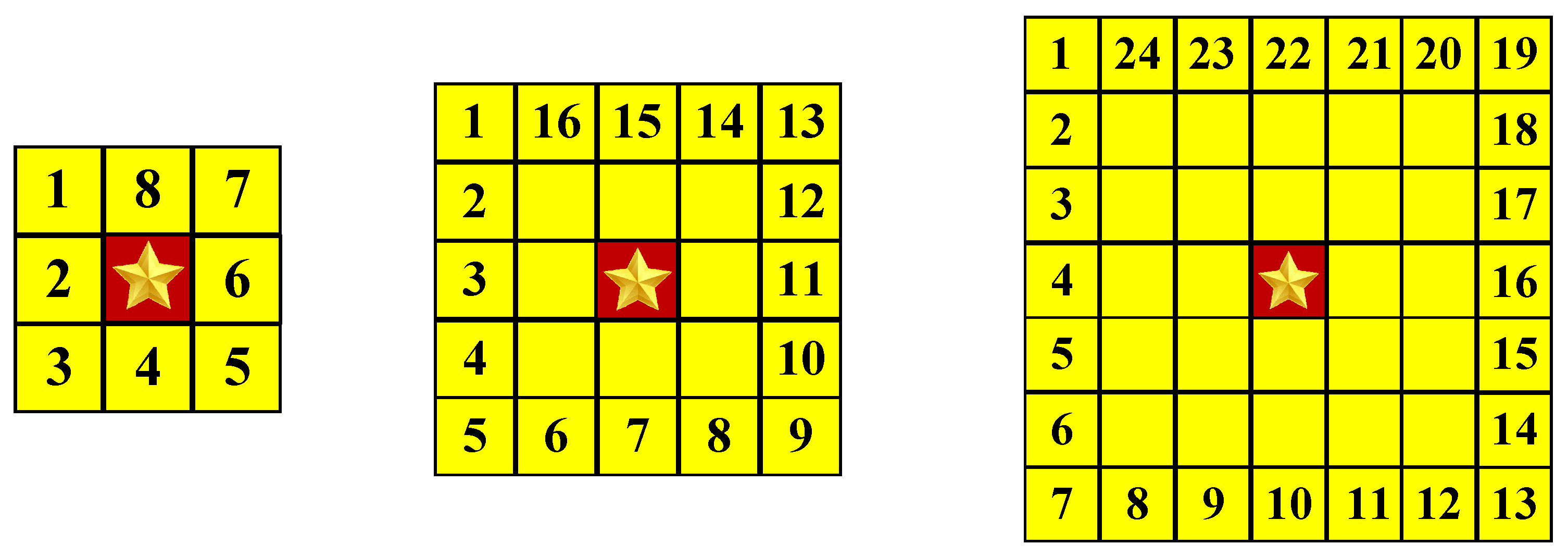
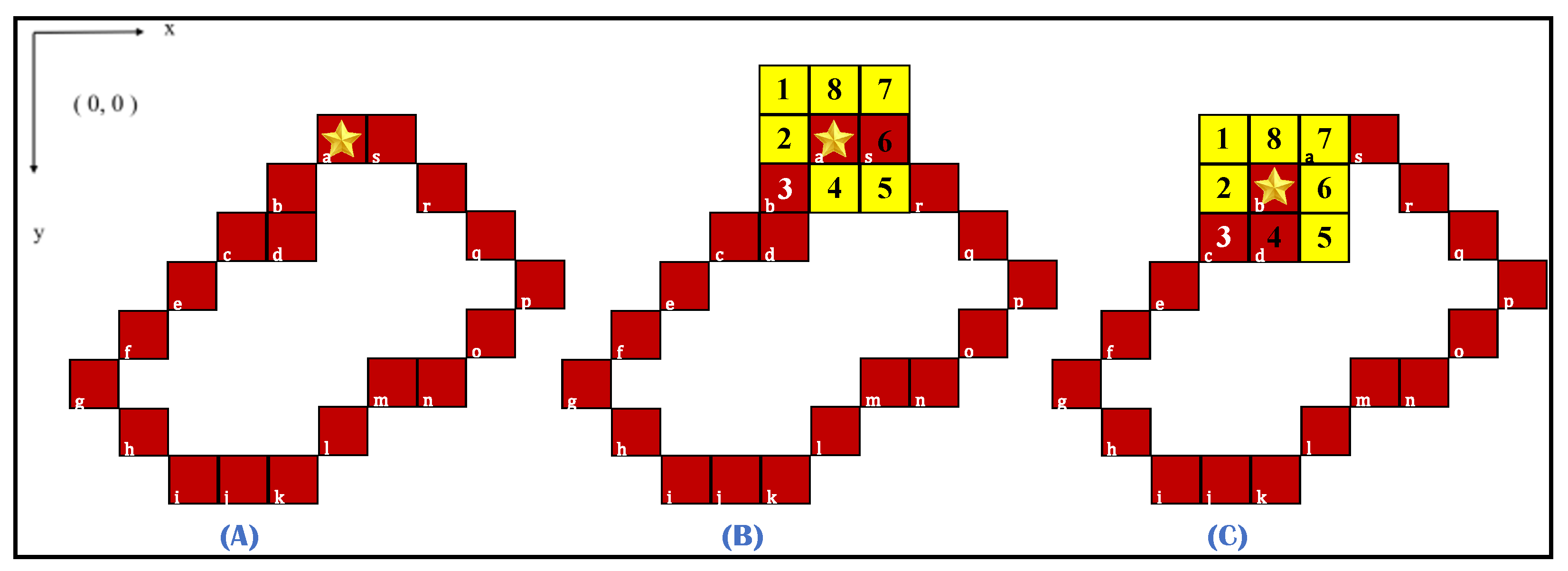
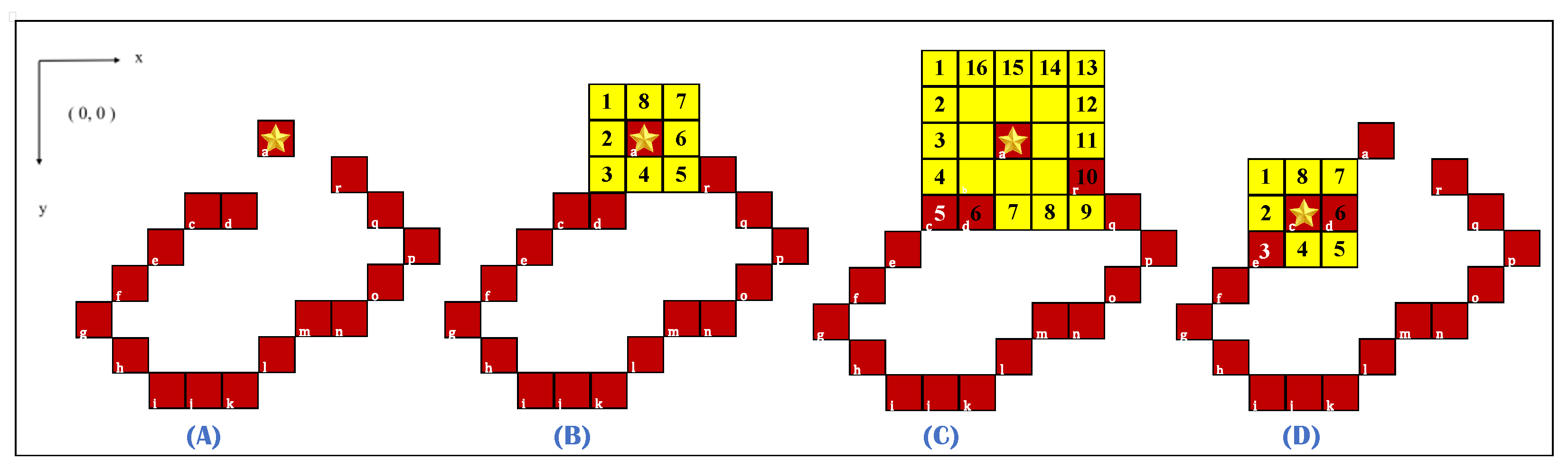
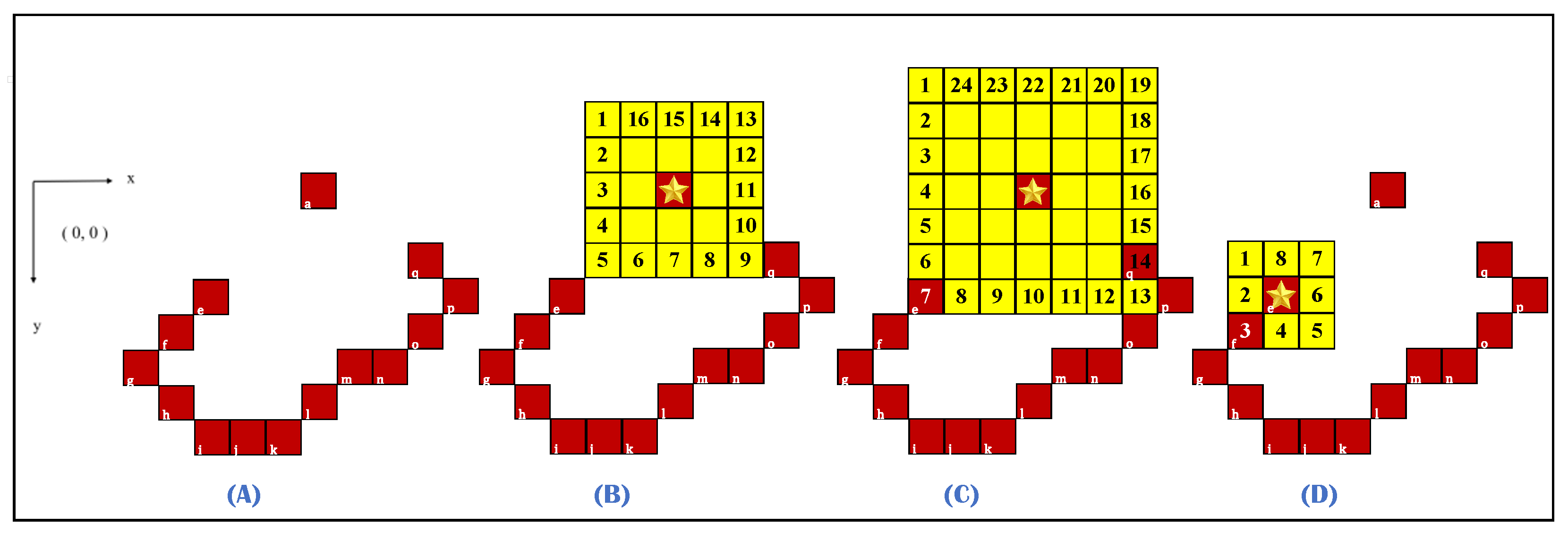
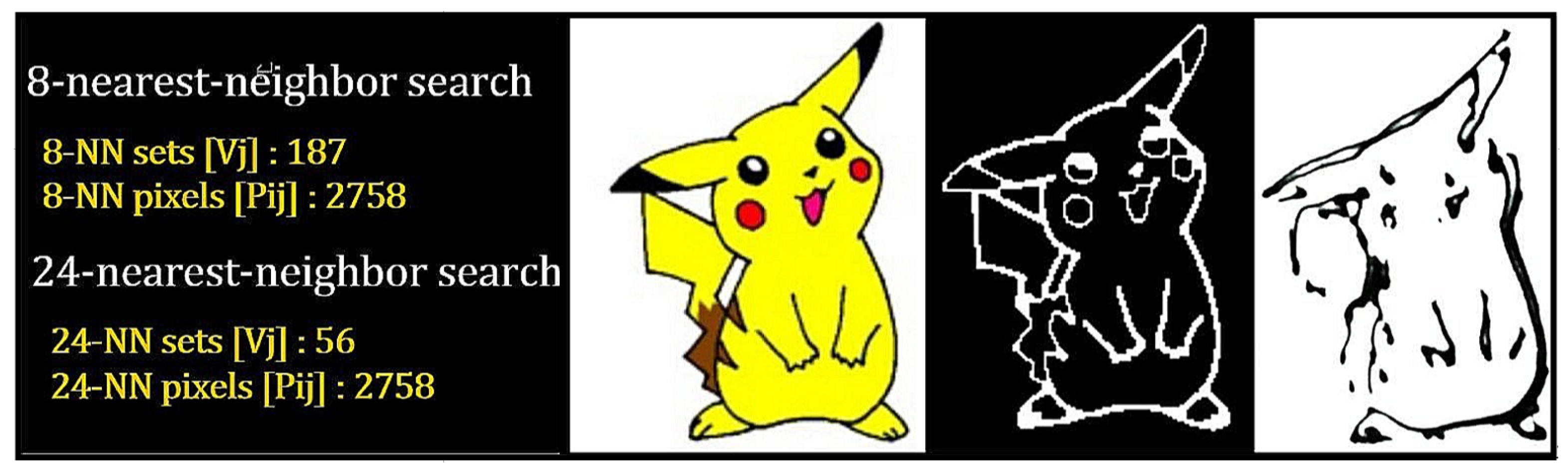
3.2. Edge-Point Sequential Arrangement
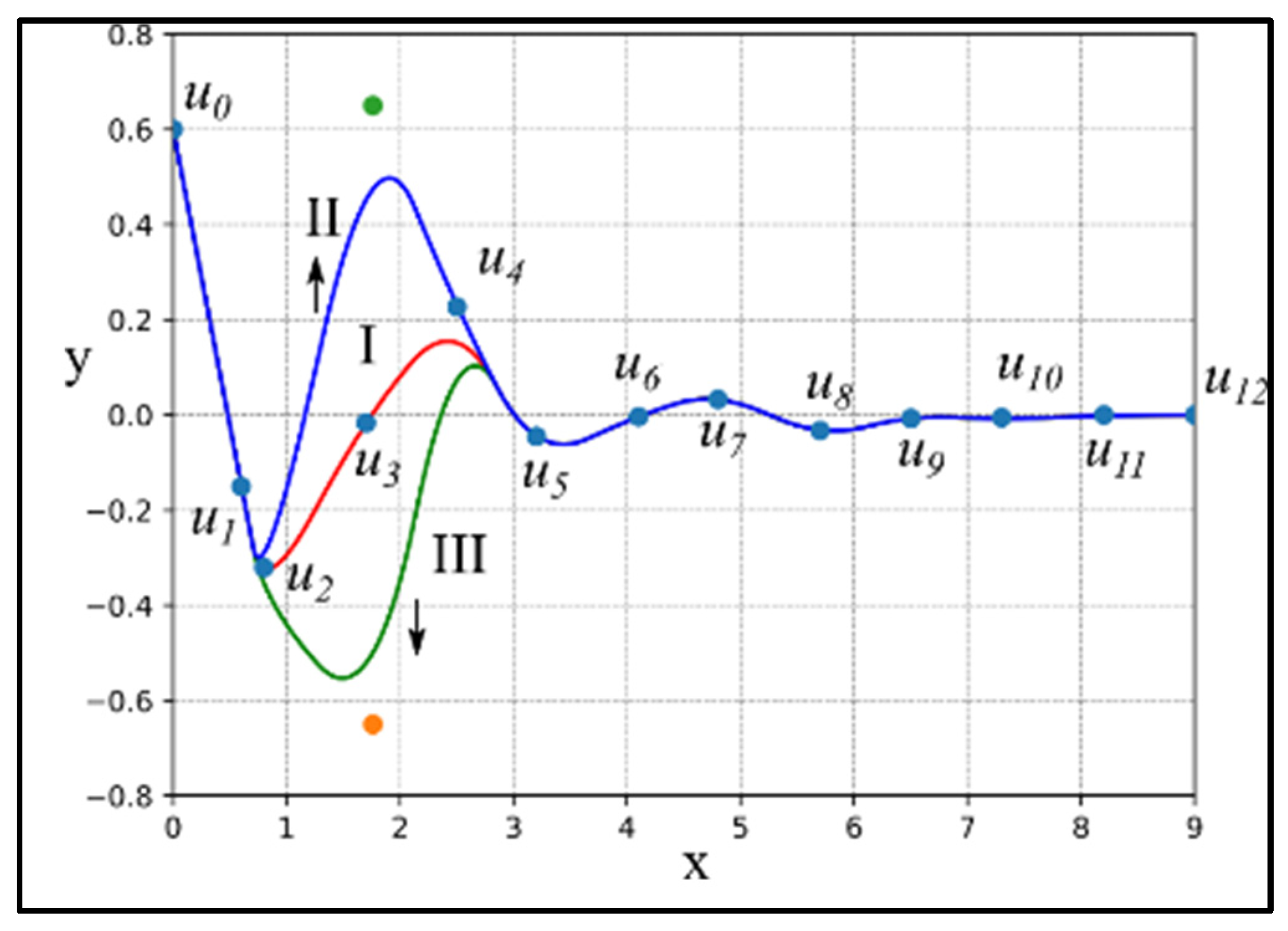
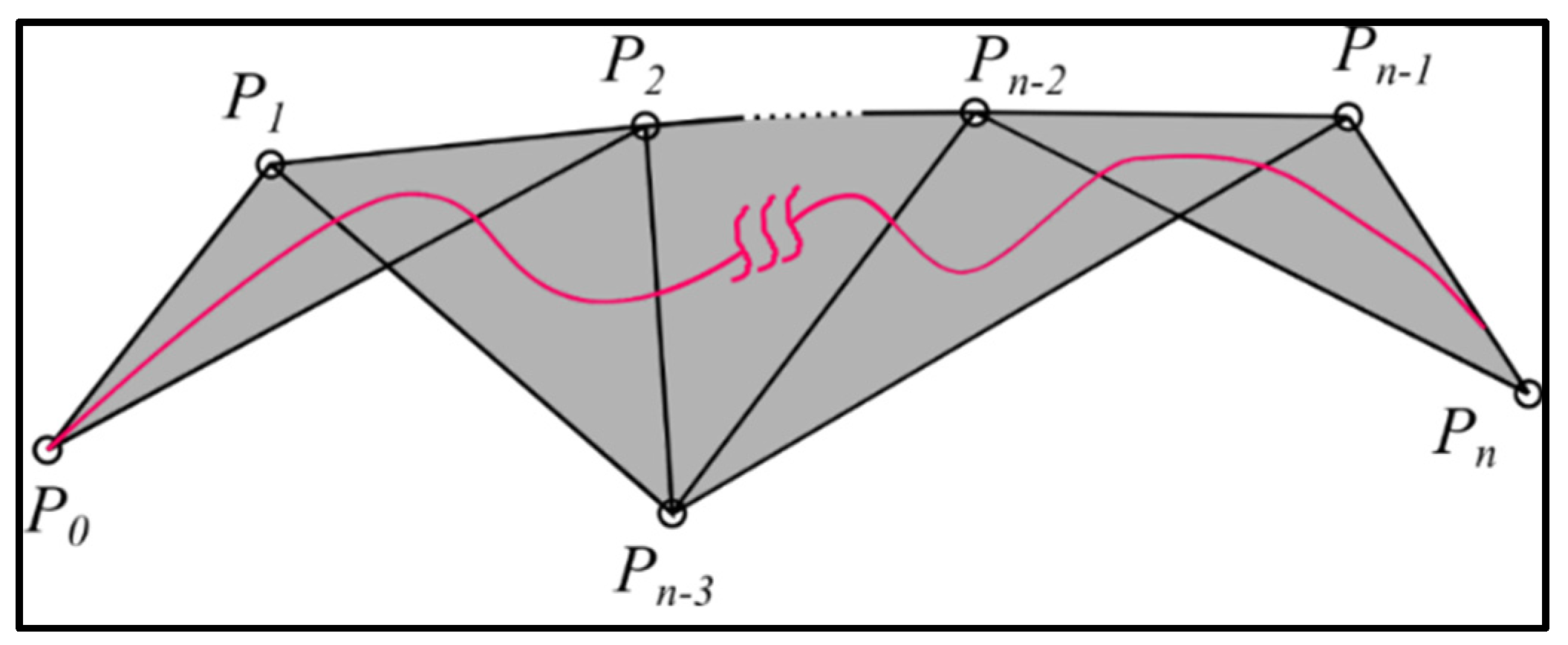
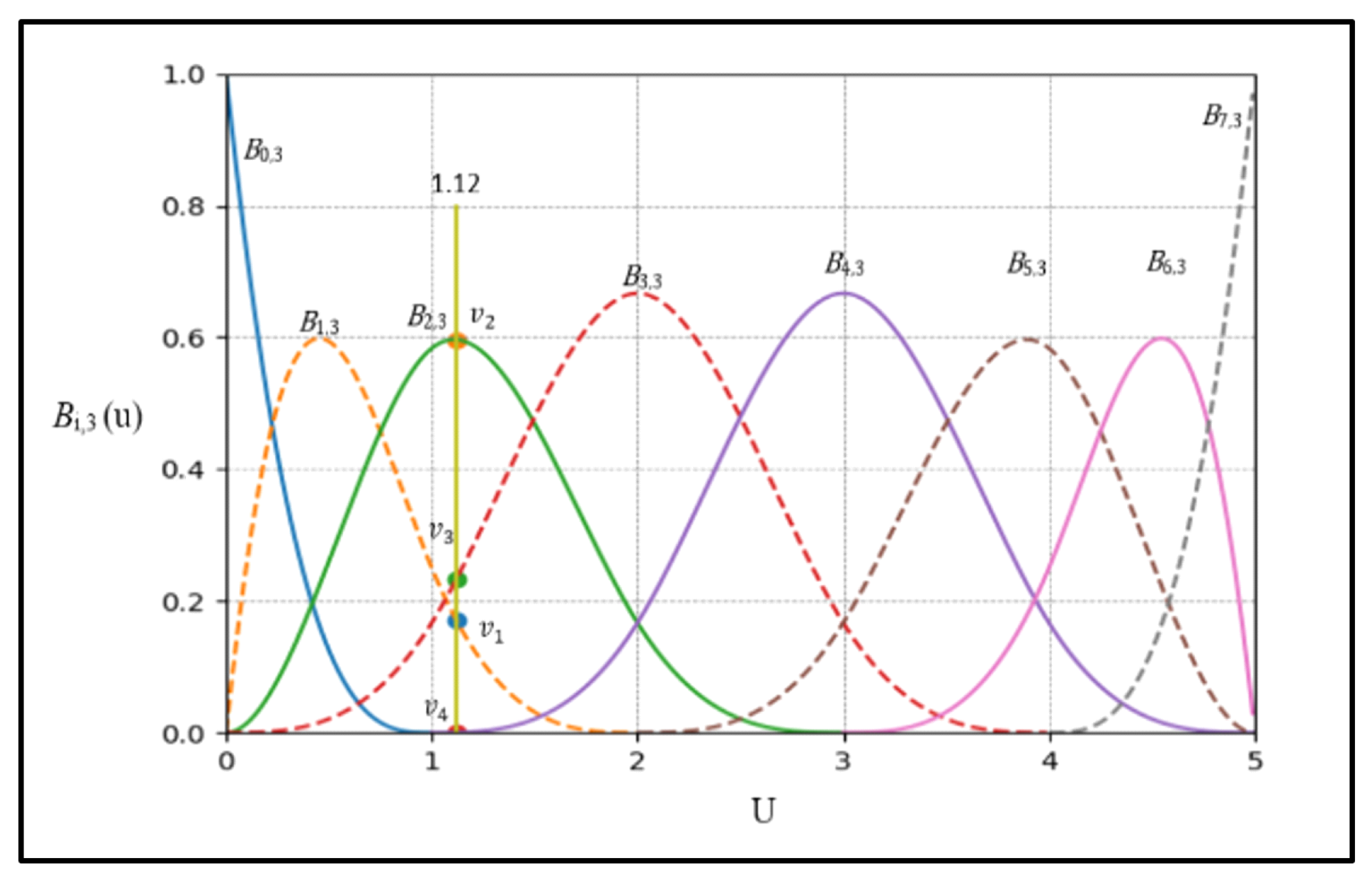
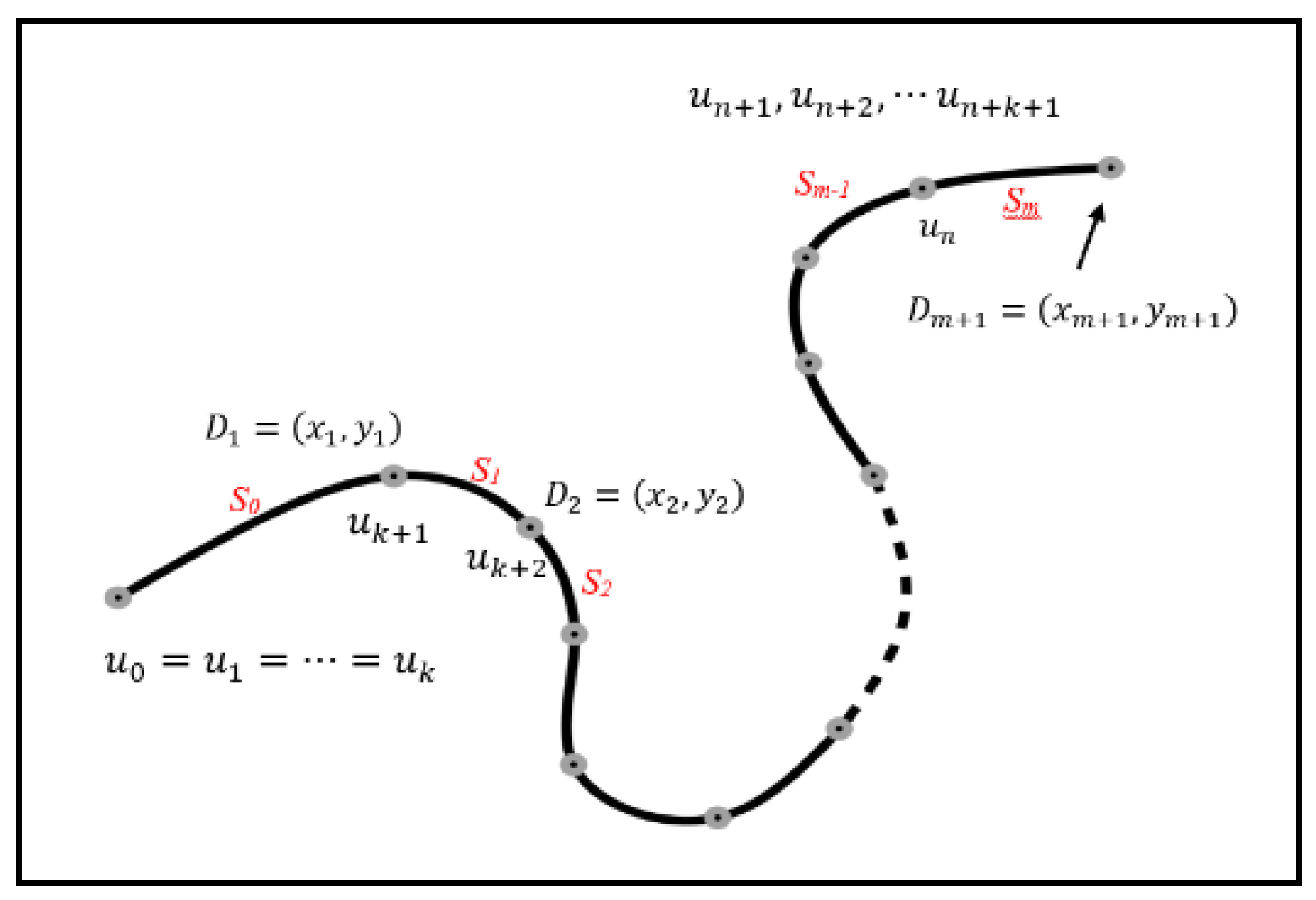
3.3. Segmented B-Spline Curve
4. Experimental Results
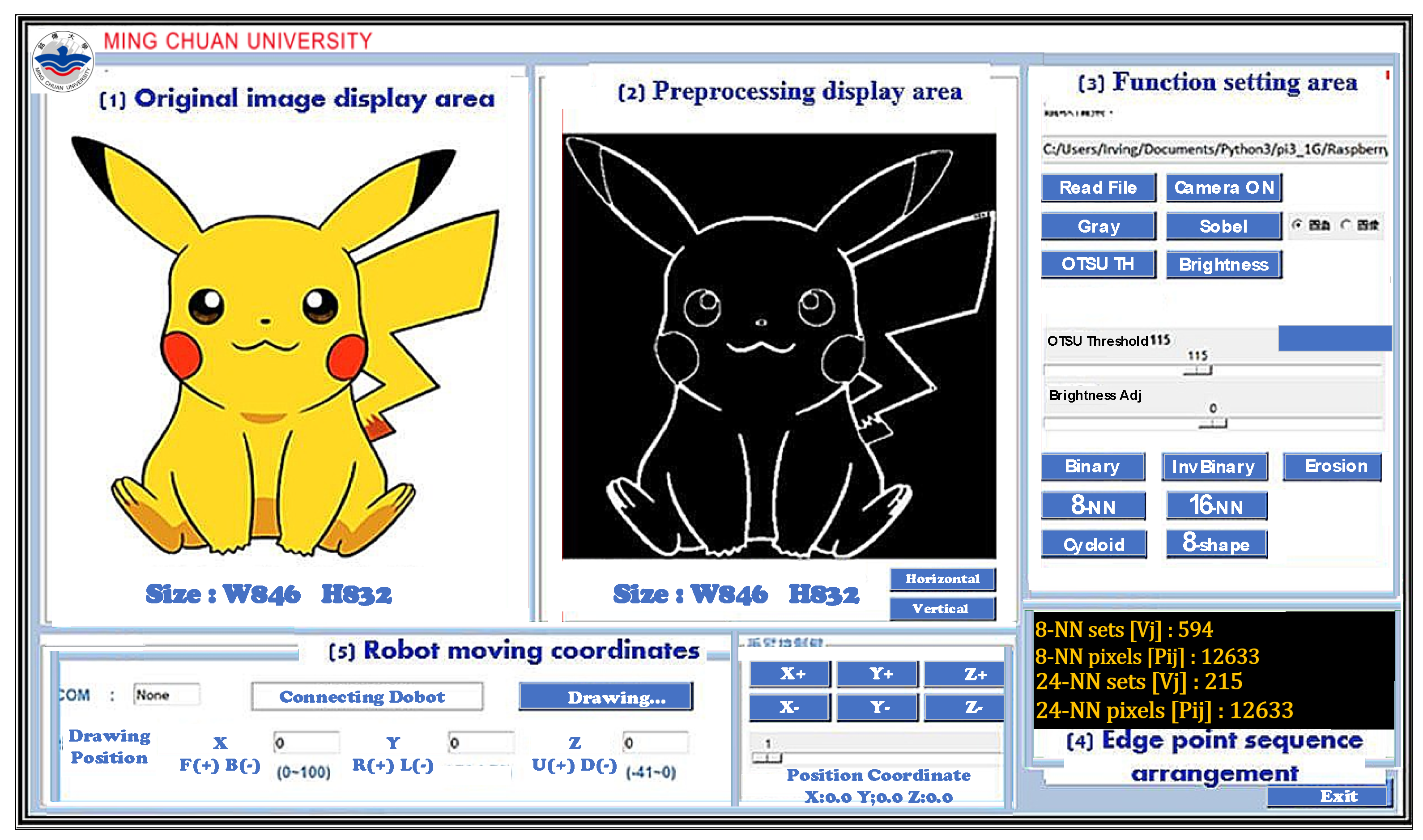
4.1. Graphical Window Interface
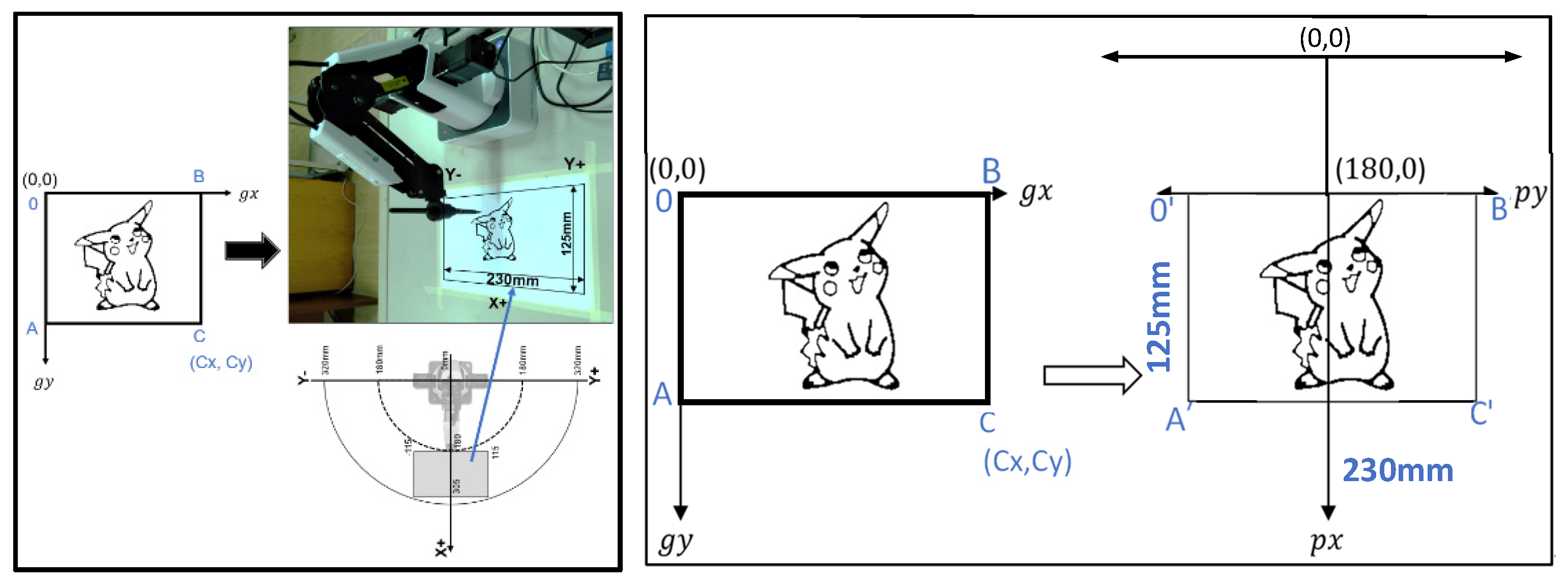
4.2. Mechanical Drawing of Edge-Point Sequential Arrangement
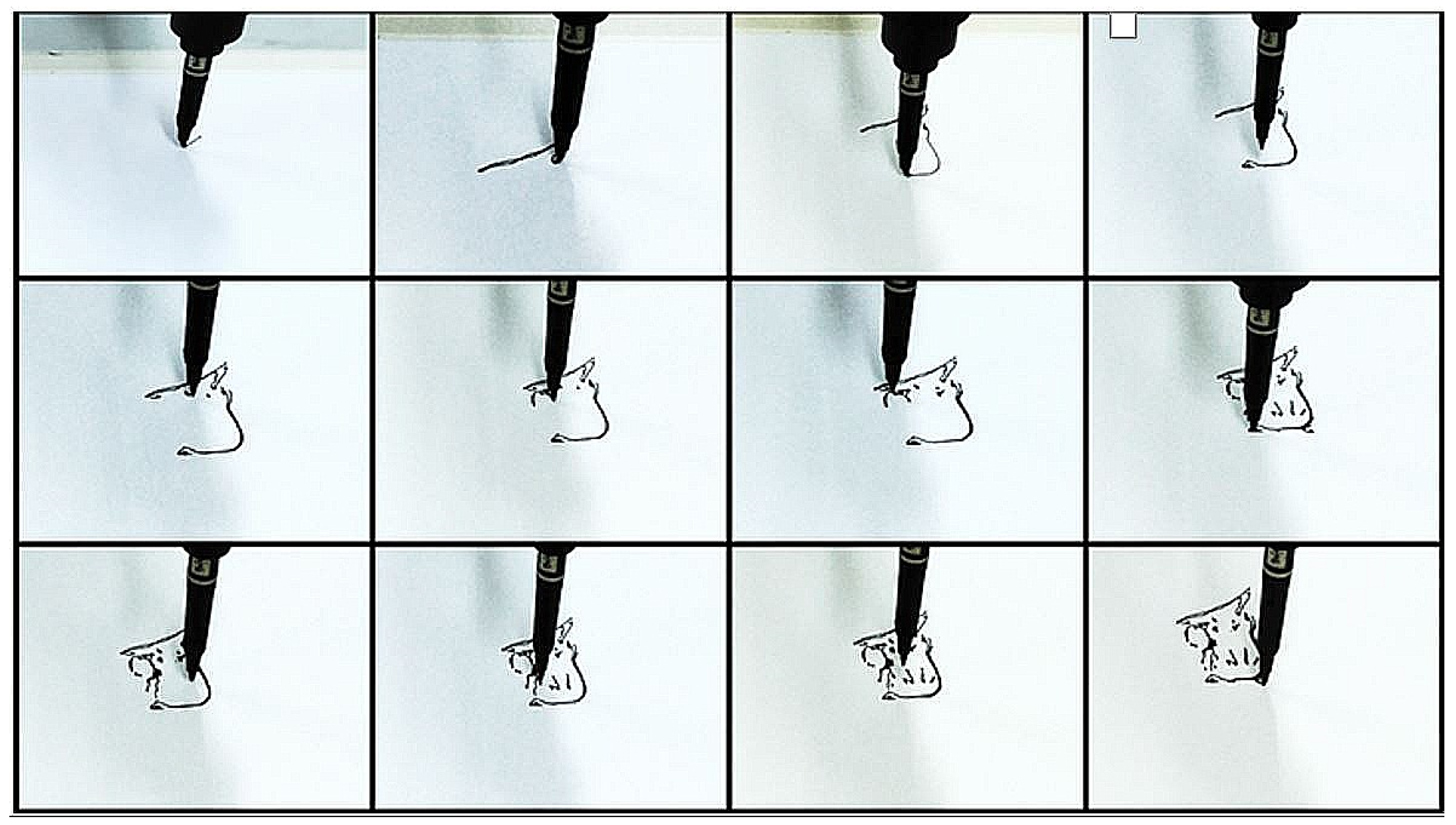
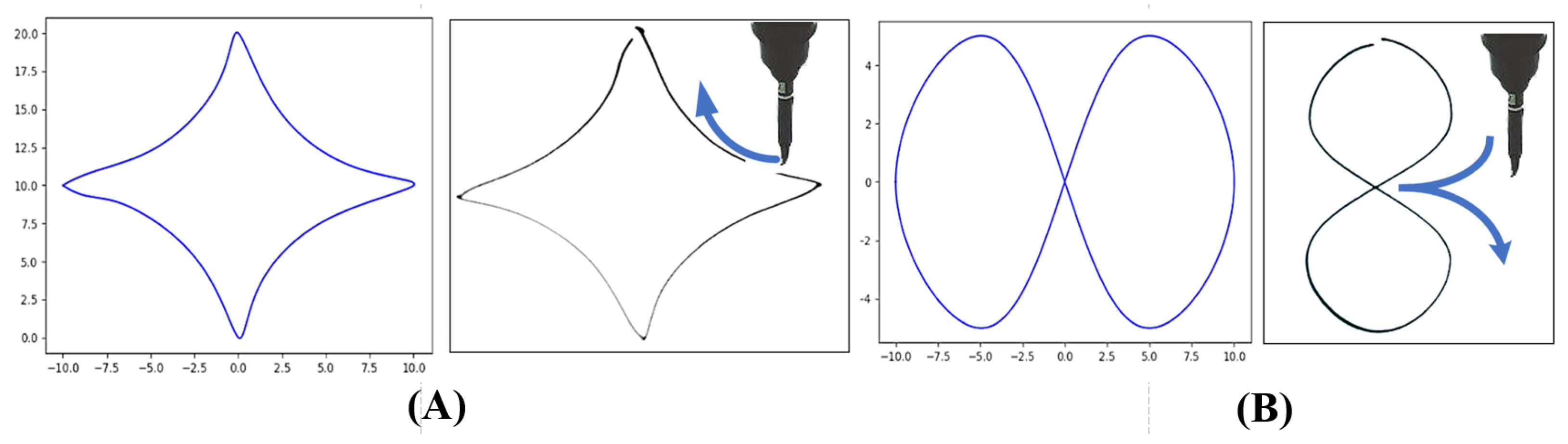
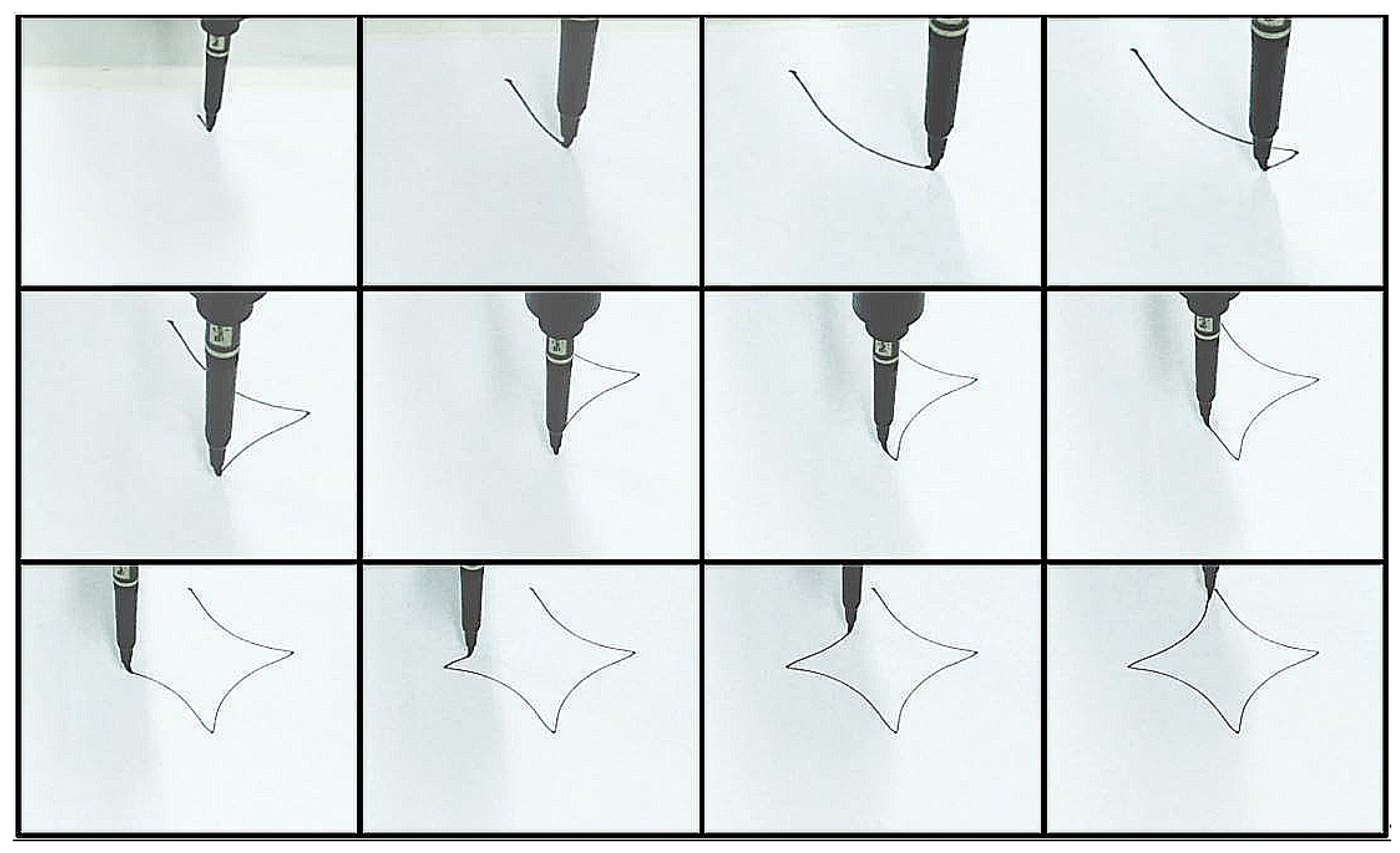
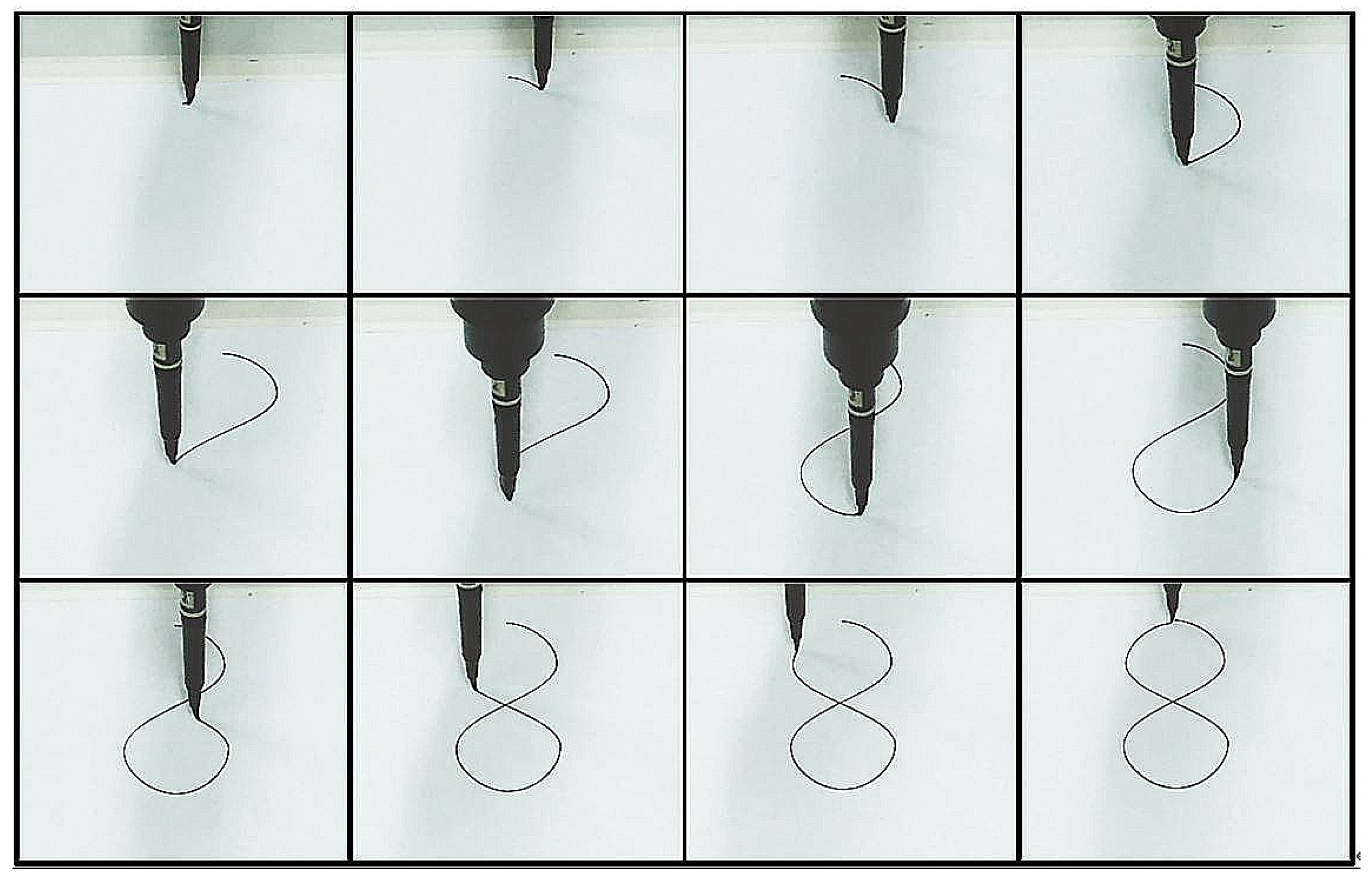
4.3. Drawing of B-Spline Curve Manipulator
5. Conclusions and Directions for Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Akella, P.; O’Reilly, O.M.; Sreenath, K. Controlling the Locomotion of Spherical Robots or why BB-8 Works. J. Mech. Robot. 2019, 11, 024501. [Google Scholar] [CrossRef] [Green Version]
- Kennington, C.; Plane, S. Symbol, Conversational, and Societal Grounding with a Toy Robot. arXiv 2017, arXiv:1709.10486. [Google Scholar]
- Souza, I.M.L.; Andrade, W.L.; Sampaio, L.M.R.; Araujo, A.L.S.O. A Systematic Review on the use of LEGO Robotics in Education. In Proceedings of the 2018 IEEE Frontiers in Education Conference (FIE), San Jose, CA, USA, 3–6 October 2018; pp. 1–9. [Google Scholar]
- Jia, Y.; Song, X.; Xu, S.S.-D. Modeling and motion analysis of four-Mecanum wheel omni-directional mobile platform. In Proceedings of the CACS International Conference on Automatic Control (CACS 2013), Nantou, Taiwan, 2–4 December 2013; pp. 328–333. [Google Scholar]
- LEGO® BOOST Videos. Available online: https://www.lego.com/en-us/themes/boost/videos (accessed on 28 October 2021).
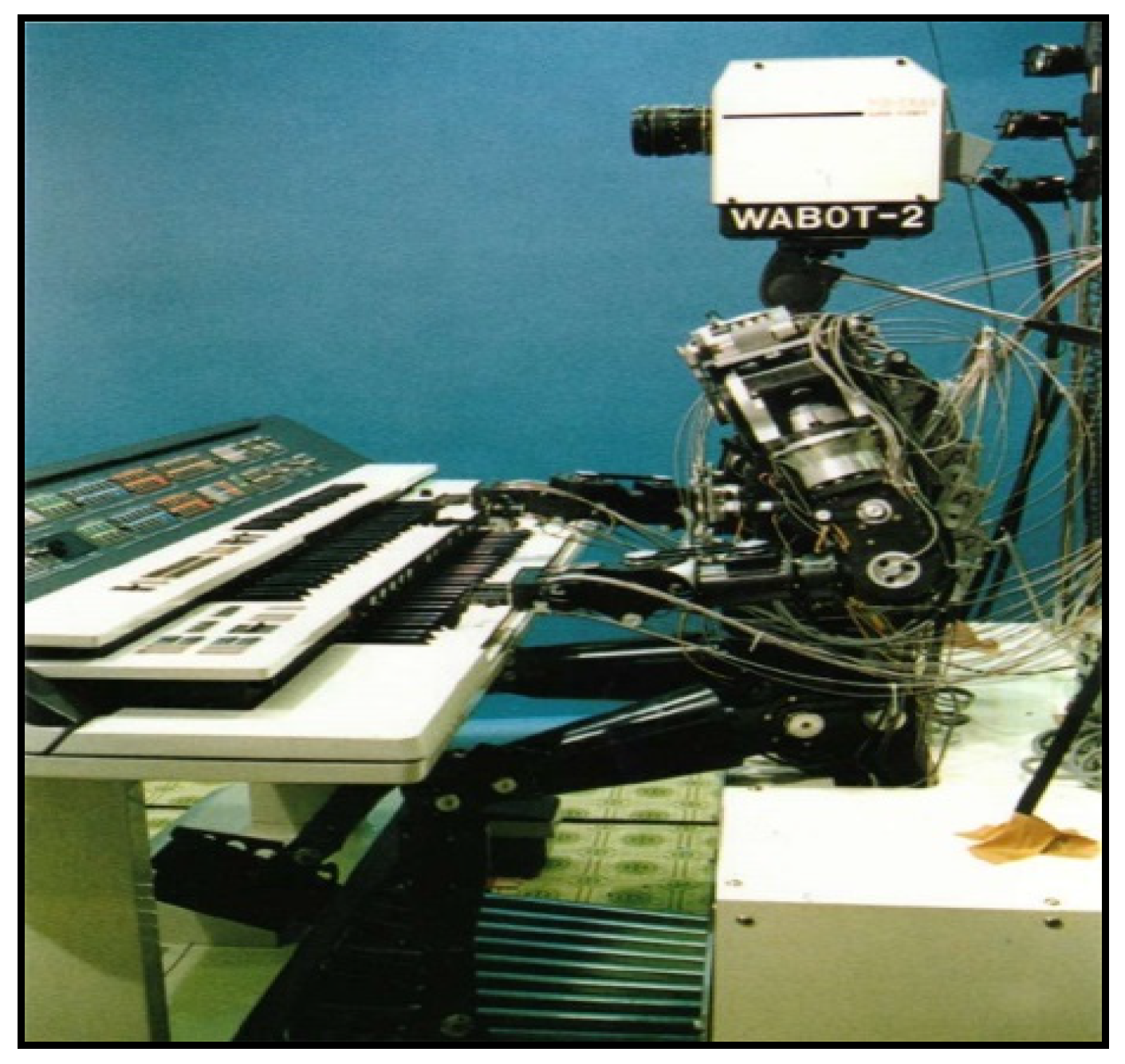
- Kato, I.; Ohteru, S.; Shirai, K.; Matsushima, T.; Narita, S.; Sugano, S.; Kobayashi, T.; Fujisawa, E. The robot musician “wabot-2” (waseda robot-2). Robotics 1987, 3, 143–155. [Google Scholar] [CrossRef]
- Sugano, S.; Kato, I. WABOT-2: Autonomous robot with dexterous finger-arm—Finger-arm coordination control in keyboard performance. In Proceedings of the IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987; pp. 90–97. [Google Scholar]
- Ogata, T.; Shimura, A.; Shibuya, K.; Sugano, S. A violin playing algorithm considering the change of phrase impression. In Proceedings of the 2000 IEEE International Conference on Systems, Man and Cybernetics, Nashville, TN, USA, 8–11 October 2000; Volume 2, pp. 1342–1347. [Google Scholar]
- Huang, H.H.; Li, W.H.; Chen, Y.J.; Wen, C.C. Automatic violin player. In Proceedings of the 10th World Congress on Intelligent Control and Automation (WCICA), Beijing, China, 6–8 July 2012; pp. 3892–3897. [Google Scholar]
- Zhongyuan University—Robot Playing String Orchestra. Available online: https://www.facebook.com/cycuViolinRobot (accessed on 28 October 2021).
- Jain, S.; Gupta, P.; Kumar, V.; Sharma, K. A force-controlled portrait drawing robot. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3160–3165. [Google Scholar]
- Sun, Y.; Xu, Y. A calligraphy robot—Callibot: Design, analysis and applications. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 85–190. [Google Scholar]
- Gülzow, J.M.; Paetzold, P.; Deussen, O. Recent developments regarding painting robots for research in automatic painting, artificial creativity, and machine learning. Appl. Sci. 2020, 10, 3396. [Google Scholar] [CrossRef]
- Scalera, L.; Seriani, S.; Gasparetto, A.; Gallina, P. Non-photorealistic rendering techniques for artistic robotic painting. Robotics 2019, 8, 10. [Google Scholar] [CrossRef] [Green Version]
- Otoniel, I.; Claudia, H.A.; Alfredo, C.O.; Arturo, D.P. Interactive system for painting artworks by regions using a robot. Robot. Auton. Syst. 2019, 121, 103263. [Google Scholar]
- Guo, C.; Bai, T.; Lu, Y.; Lin, Y.; Xiong, G.; Wang, X.; Wang, F.Y. Skywork-daVinci: A novel CPSS-based painting support system. In Proceedings of the IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 673–678. [Google Scholar]
- RobotDK: Lights out Robot Painting. Available online: https://robodk.com/blog/lights-out-robot-painting/ (accessed on 20 November 2021).
- Robots Write Calligraphy. What Do You Think? Available online: https://kknews.cc/tech/alxnrrv.html (accessed on 24 August 2021).
- Shenzhen Yuejiang Technology Co. Ltd. Dobot Magician Specifications/Shipping List/API Description. Available online: https://www.dobot.cc./ (accessed on 24 August 2021).
- Hock, O.; Šedo, J. Forward and Inverse Kinematics Using Pseudoinverse and Transposition Method for Robotic Arm DOBOT; IntechOpen: Vienna, Austria, 2017. [Google Scholar]
- Tsao, S.W. Design of Robot Arm Laser Engraving Systems Base on Android App. Master’s Thesis, National Taiwan Ocean University, Keelung, Taiwan, 2019. [Google Scholar]
- Truong, N.V.; Vu, D.L. Remote monitoring and control of industrial process via wireless network and Android platform. In Proceedings of the IEEE International Conference on Control, Automation and Information Sciences, Ho Chi Minh City, Vietnam, 26–29 November 2012; pp. 340–343. [Google Scholar]
- Deussen, O.; Lindemeier, T.; Pirk, S.; Tautzenberger, M. Feedback-guided Stroke Placement for a Painting Machine. In Proceedings of the Eighth Annual Symposium on Computational Aesthetics in Graphics, Visualization, and Imaging, Annecy, France, 4–6 June 2012; pp. 25–33. [Google Scholar]
- Avanzato, R.L. Development of a MATLAB/ROS Interface to a Low-cost Robot Arm. In Proceedings of the 2020 ASEE Virtual Annual Conference Content Access, Virtual Online, 22 June 2020. [Google Scholar]
- Luo, R.C.; Hsu, C.; Chen, S. Electroencephalogram signal analysis as basis for effective evaluation of robotic therapeutic massage. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 2940–2945. [Google Scholar]
- Dhawan, A.; Honrao, V. Implementation of Hand Detection based Techniques for Human Computer Interaction. arXiv 2013, arXiv:1312.7560. [Google Scholar]
- University in Finland Build a Industry 4.0 Assembly Line Using Dobot Magician. Available online: https://www.youtube.com/watch?v=razSDc79Xi4 (accessed on 24 August 2021).
- Myint, K.M.; Htun, Z.M.M.; Tun, H.M. Position Control Method for Pick and Place. Int. J. Sci. Res. 2016, 5, 57–61. [Google Scholar]
- Kuo, S.; Fang, H.H. Design of GA-Based Control for Electrical Servo Drive. Adv. Mater. Res. 2011, 201, 2375–2378. [Google Scholar]
- Hanan, S.; Markku, T. Efficient Component Labeling of Images of Arbitrary Dimension Represented by Linear Bintrees. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 579–586. [Google Scholar] [CrossRef] [Green Version]
- Lifeng, H.; Xiwei, R.; Qihang, G.; Xiao, Z.; Bin, Y.; Yuyan, C. labeling problem: A review of state-of-the-art algorithms. Pattern Recognit. 2017, 70, 25–43. [Google Scholar]
- Tsai, P.S. Modeling and Control for Wheeled Mobile Robots with Nonholonomic Constraints. Ph.D. Thesis, National Taiwan University, Taipei, Taiwan, 2006. [Google Scholar]
- de Boor, C. A Practical Guide to Splines; Springer: New York, NY, USA, 1978. [Google Scholar]
- Shen, B.Z.; Chen, C.S. A Novel Online Time-Optimal Kinodynamic Motion Planning for Autonomous Mobile Robot Using NURBS. In Proceedings of the International Conference on Advanced Robotics and Intelligent Systems (ARIS 2020), Taipei, Taiwan, 19–21 August 2020. [Google Scholar]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Header | Length | Payload | Checksum | |||
| ID | Ctrl | Params | ||||
| rw | Is Queued | |||||
| 0xAA 0xAA | 1 Byte | 1 Byte | High Byte 0x10 or 0x00 | Low Byte 0x00 or 0x01 | As Directed | Payload Calculate |
| Displacement coordinate | z | |||
| Decimal system | 160 | 90 | −20 | 0 |
| IEEE-754 | 0100001100100000 0000000000000000 | 0100001010110100 0000000000000000 | 1100000110100000 0000000000000000 | 0000000000000000 0000000000000000 |
| 16-Base system | 0x430x200x000x00 | 0x420xb40x000x00 | 0xc10xa00x000x00 | 0x000x000x000x00 |
| Small byte align type | 0x000x000x200x43 | 0x000x000xb40x42 | 0x000x000xa00xc1 | 0x000x000x000x00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, P.-S.; Wu, T.-F.; Chen, J.-Y.; Lee, F.-H. Drawing System with Dobot Magician Manipulator Based on Image Processing. Machines 2021, 9, 302. https://doi.org/10.3390/machines9120302
Tsai P-S, Wu T-F, Chen J-Y, Lee F-H. Drawing System with Dobot Magician Manipulator Based on Image Processing. Machines. 2021; 9(12):302. https://doi.org/10.3390/machines9120302
Chicago/Turabian StyleTsai, Pu-Sheng, Ter-Feng Wu, Jen-Yang Chen, and Fu-Hsing Lee. 2021. "Drawing System with Dobot Magician Manipulator Based on Image Processing" Machines 9, no. 12: 302. https://doi.org/10.3390/machines9120302