
A Graph-Based Optimal On-Ramp Merging of Connected Vehicles on the Highway


Abstract
:1. Introduction
2. Related Work
3. Problem Formulation
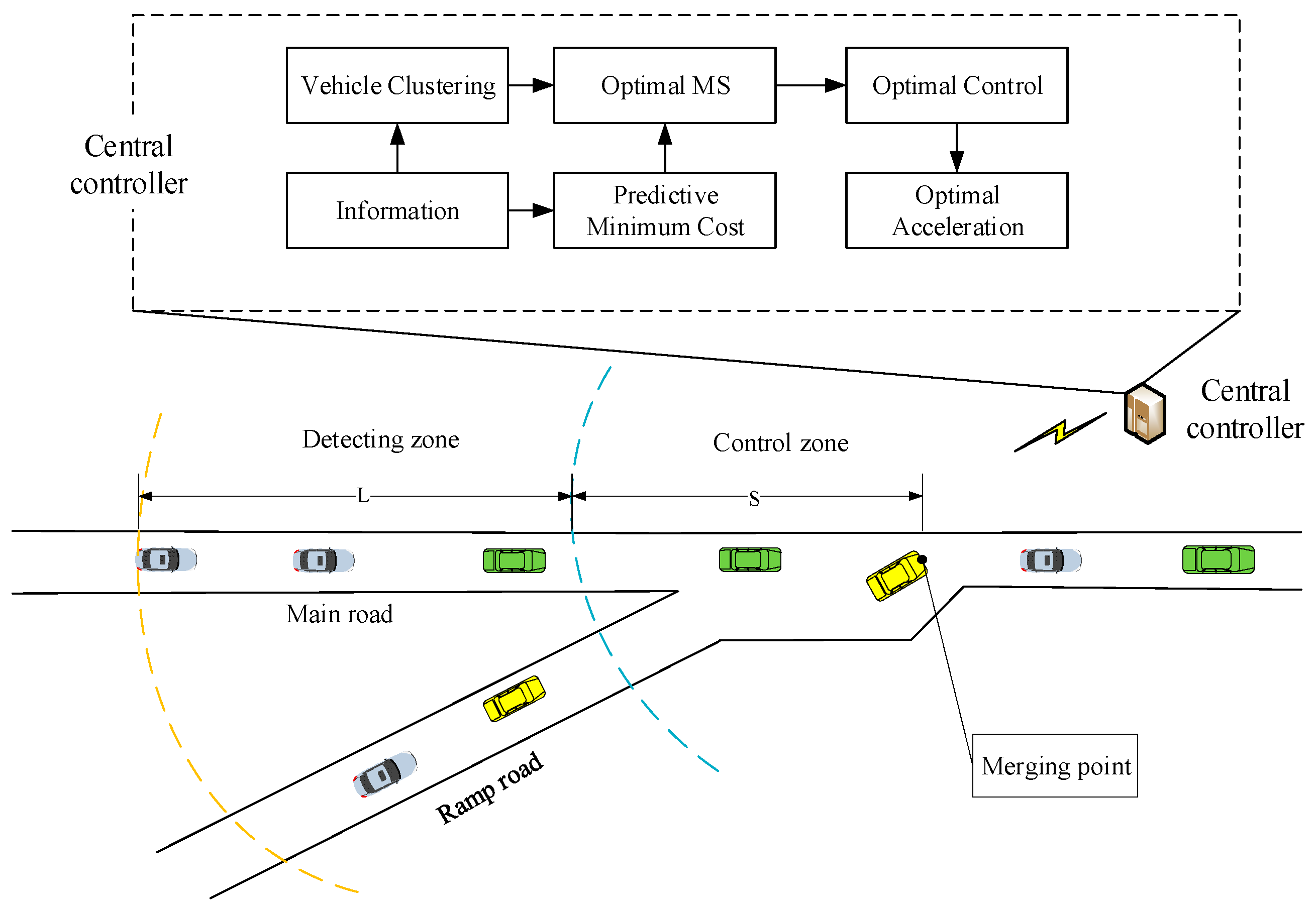
3.1. General System Description
- All vehicles are CAVs that can communicate with the central controller through V2I;
- Overtaking on a single-lane road is not allowed;
- Vehicles on the ramp are forced to merge into the main road at the merging point.

3.2. Optimization Problem Formulation
4. The Graph-Based Optimal Global Method
4.1. Graph-Based Optimal Global Modeling
4.2. The Predicted Fuel Consumption of the Vehicles
4.3. Improved Shortest Path Algorithm to Find Optimal Merging Sequence
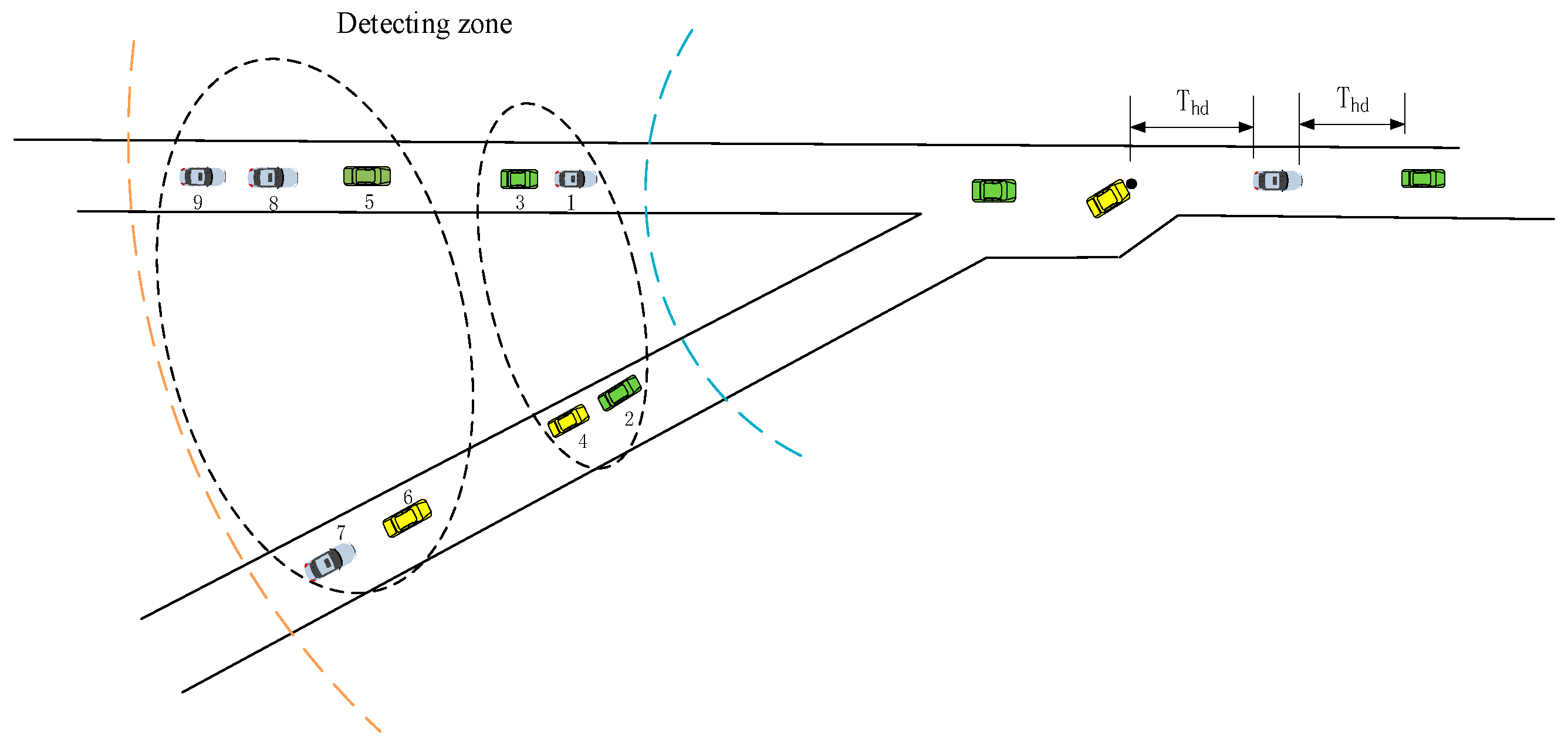
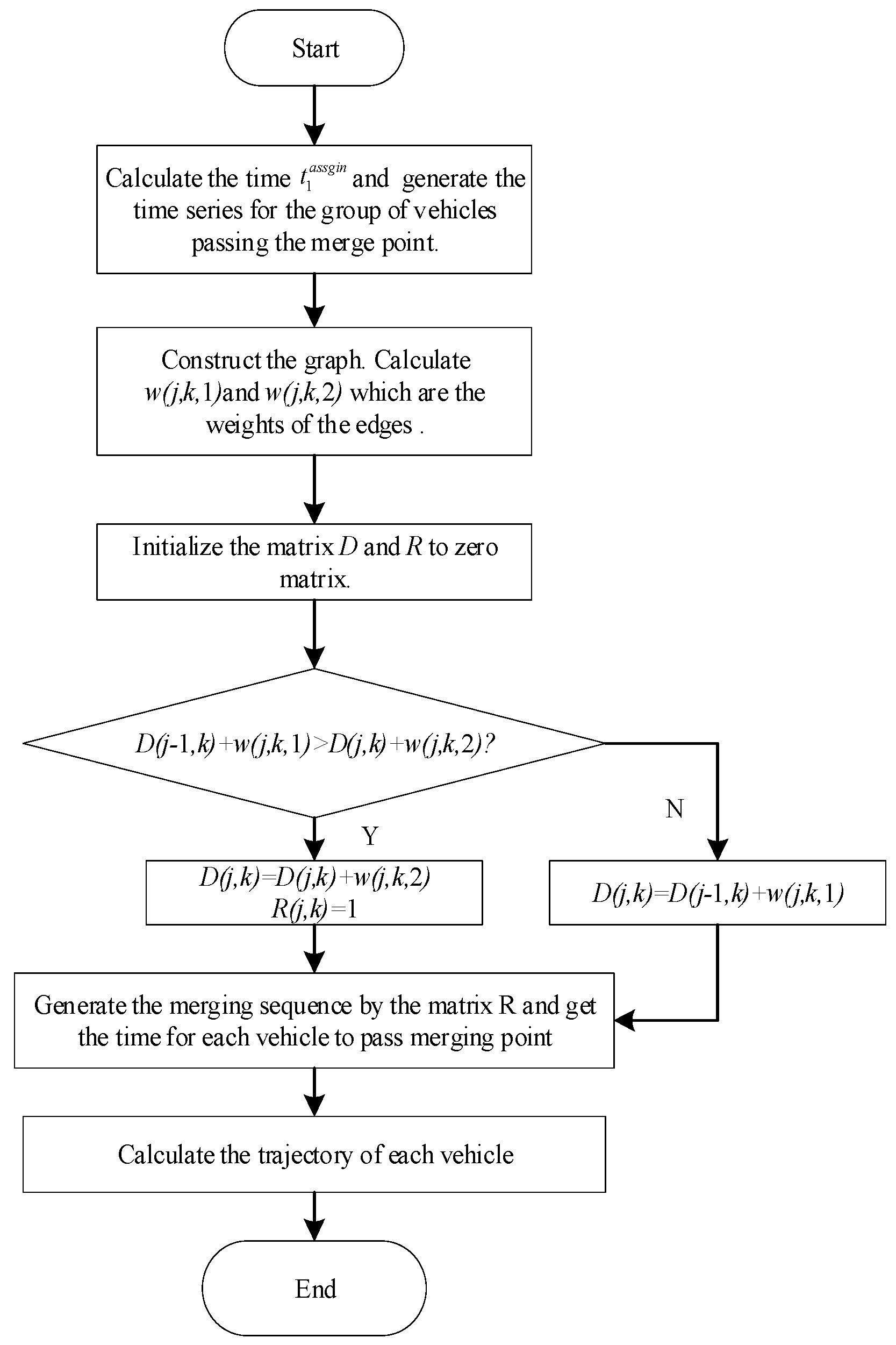
- Determine the time for the first vehicle to pass through the merge point, based on which leading vehicles on the main road and the ramp are closer to the merging point. Then, generate the time series by Equation (5) for the group of vehicles passing the merge point;
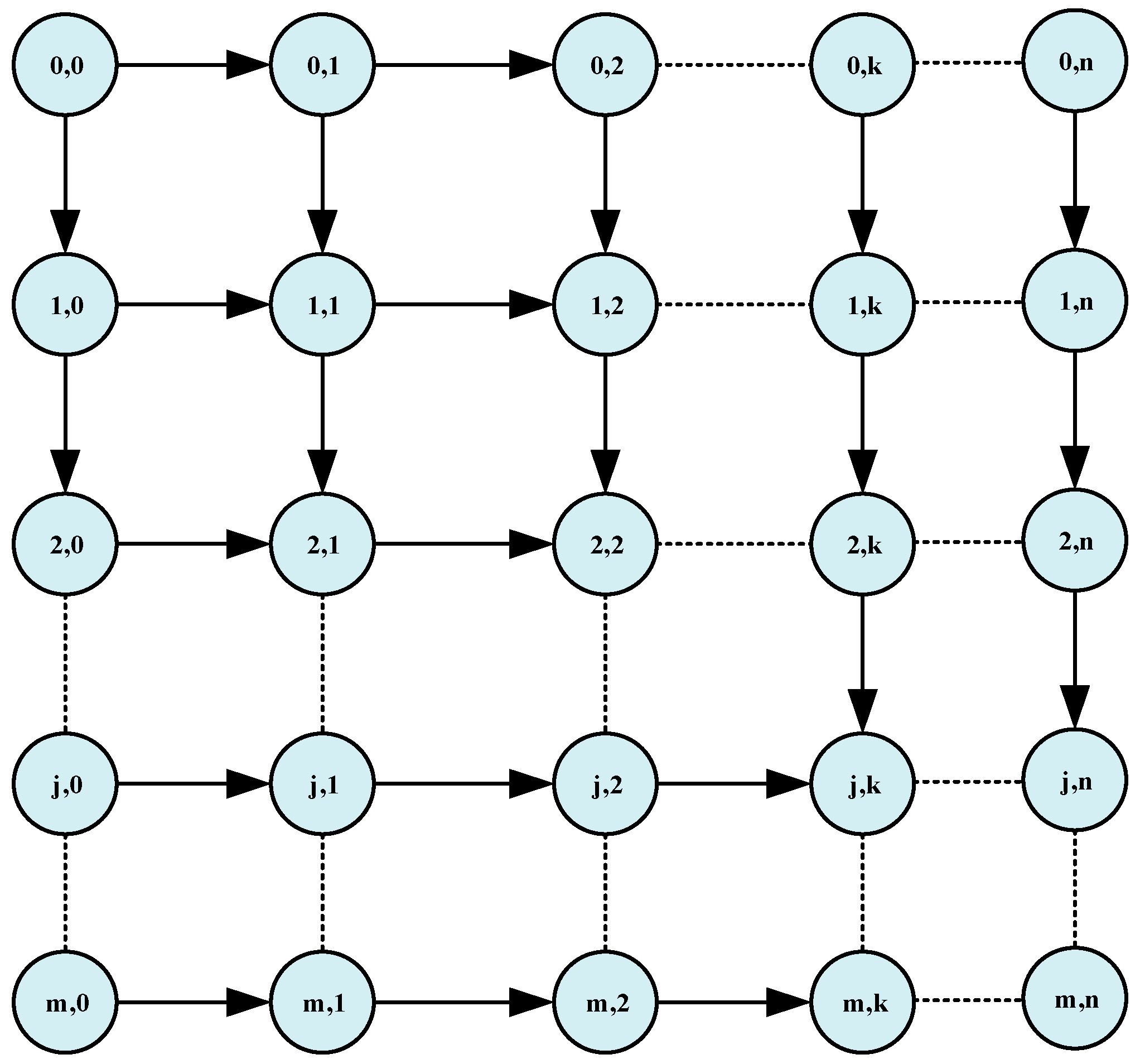
- Calculate the weight by Equation (19) to construct the graph. The and store the weights of ) and (), respectively. When or , the weight is infinite;
- Calculate matrix and . The denotes the length of the shortest path from to . Therefore, . The matrix records the shortest path. The is initialized to the zero matrix. When , the is assigned the value 1;
- The optimized merge sequence is obtained from the matrix . Then each vehicle on the main road and the ramp road gets the time to pass the merge point according to the time series in step 1;
- Calculate the trajectory of each vehicle to meet the minimum fuel consumption condition. Therefore, Equation (13) is the analytical solution of the vehicle trajectory.
5. Simulation Results
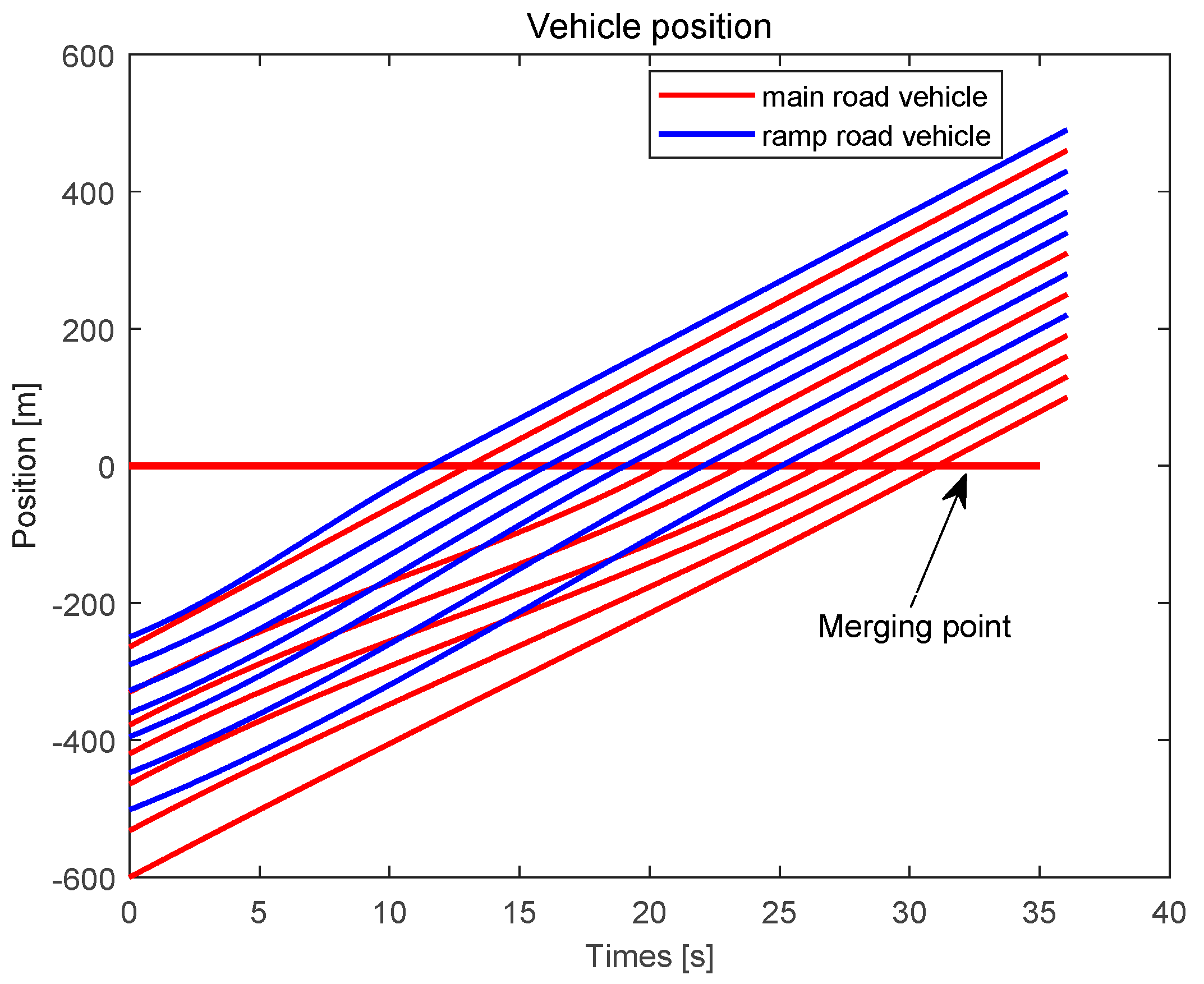
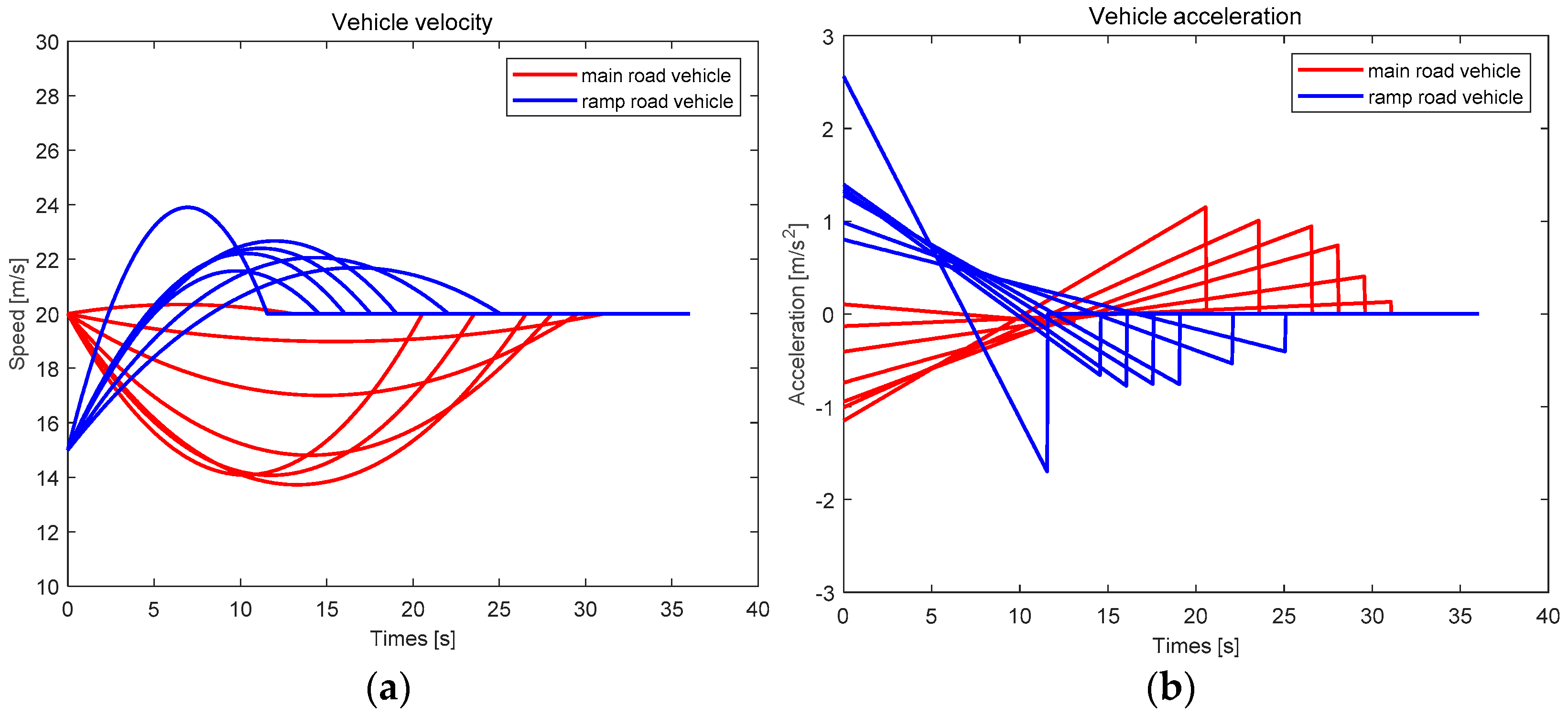
5.1. Cast Study 1: A Group of Vehicles Passes through the Merging Point
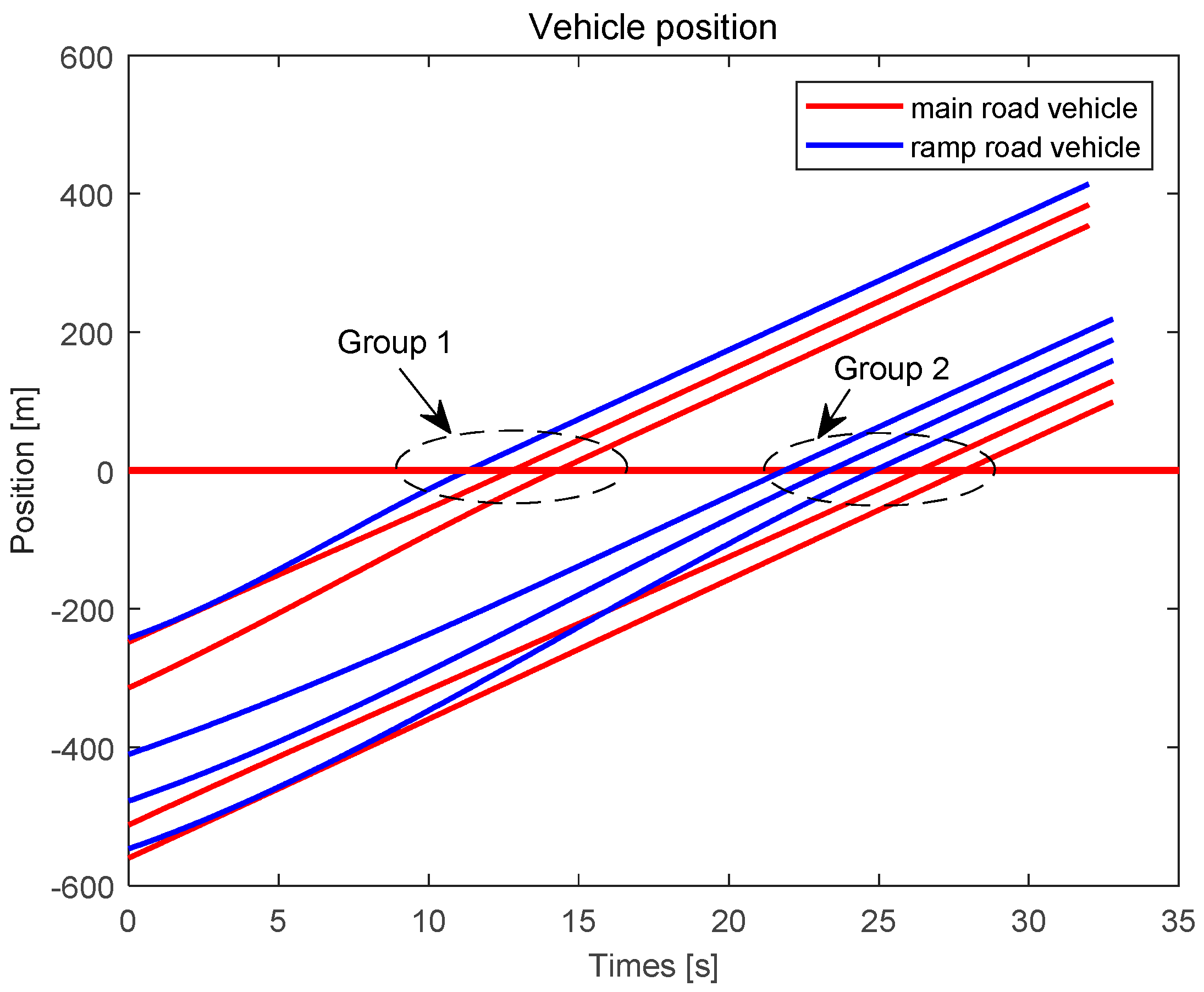
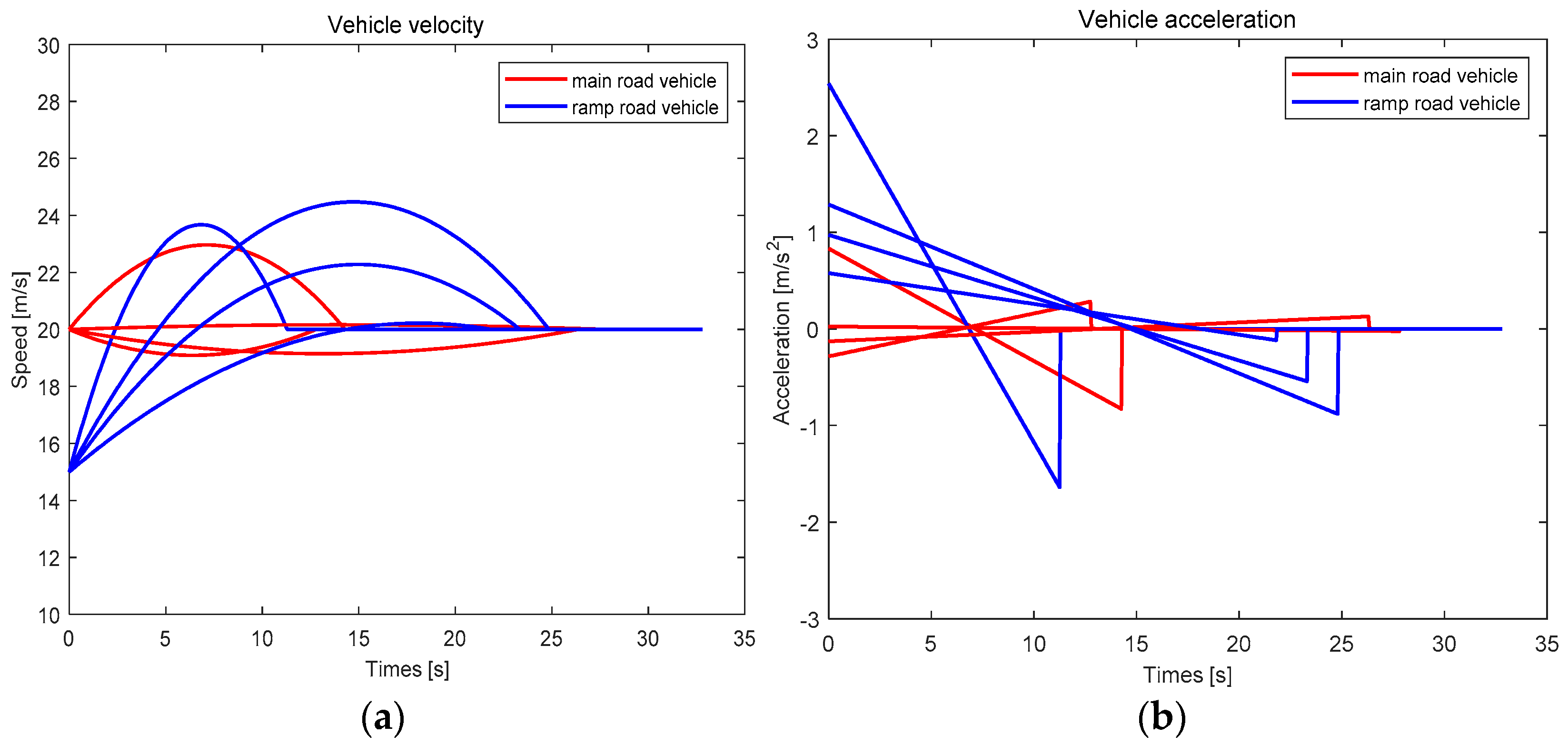
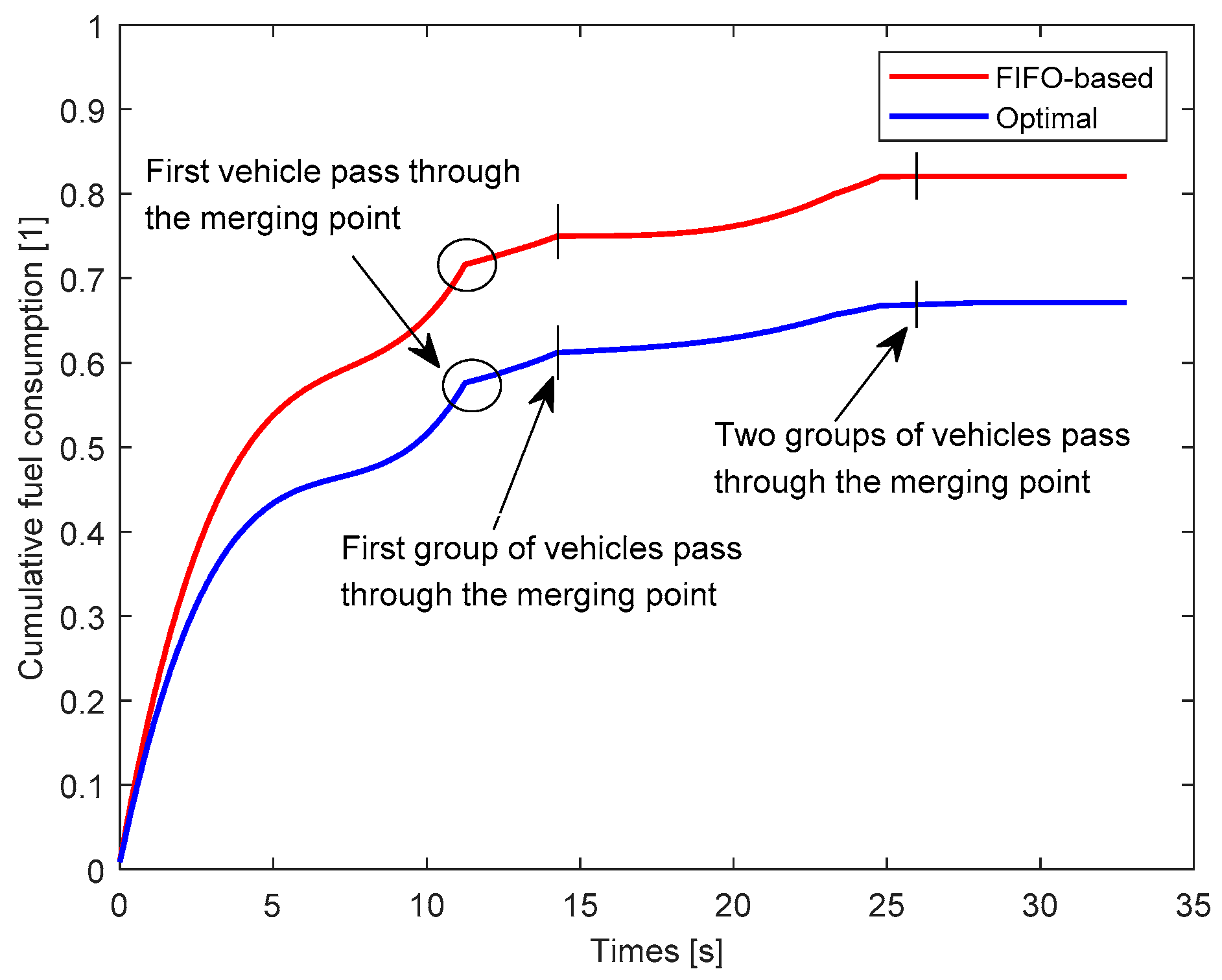
5.2. Case Study 2: Multiple Groups of Vehicles Pass through the Merging Point
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bai, Y.; Zhang, Y.; Li, X.; Hu, J. Cooperative weaving for connected and automated vehicles to reduce traffic oscillation. Transp. A Transp. Sci. 2019, 1–19. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. A Survey on the Coordination of Connected and Automated Vehicles at Intersections and Merging at Highway On-Ramps. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1066–1077. [Google Scholar] [CrossRef]
- Zou, Y.; Qu, X. On the impact of connected automated vehicles in freeway work zones: A cooperative cellular automata model based approach. J. Intell. Connect. Veh. 2018, 1, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Rios-Torres, J.; Malikopoulos, A.A. Impact of Partial Penetrations of Connected and Automated Vehicles on Fuel Consumption and Traffic Flow. IEEE Trans. Intell. Veh. 2018, 3, 453–462. [Google Scholar] [CrossRef]
- Mahmood, D.A.; Horváth, G. Analysis of the message propagation speed in VANET with disconnected RSUs. Mathematics 2020, 8, 782. [Google Scholar] [CrossRef]
- Shi, Y.; Lv, L.; Yu, H.; Yu, L.; Zhang, Z. A Center-Rule-Based Neighborhood Search Algorithm for Roadside Units Deployment in Emergency Scenarios. Mathematics 2020, 8, 1734. [Google Scholar] [CrossRef]
- Xu, B.; Li, S.E.; Bian, Y.; Li, S.; Ban, X.J.; Wang, J.; Li, K. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections. Transp. Res. Part C Emerg. Technol. 2018, 93, 322–334. [Google Scholar] [CrossRef]
- Ding, J.; Peng, H.; Zhang, Y.; Li, L. Penetration effect of connected and automated vehicles on cooperative on-ramp merging. IET Intell. Transp. Syst. 2020, 14, 56–64. [Google Scholar] [CrossRef]
- Ntousakis, I.A.; Nikolos, I.K.; Papageorgiou, M. Optimal vehicle trajectory planning in the context of cooperative merging on highways. Transp. Res. Part C Emerg. Technol. 2016, 71, 464–488. [Google Scholar] [CrossRef]
- Malikopoulos, A.A.; Hong, S.; Park, B.B.; Lee, J.; Ryu, S. Optimal Control for Speed Harmonization of Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2405–2417. [Google Scholar] [CrossRef] [Green Version]
- Milanes, V.; Godoy, J.; Villagra, J.; Perez, J. Automated on-ramp merging system for congested traffic situations. IEEE Trans. Intell. Transp. Syst. 2011, 12, 500–508. [Google Scholar] [CrossRef] [Green Version]
- Awal, T.; Kulik, L.; Ramamohanrao, K. Optimal traffic merging strategy for communication- and sensor-enabled vehicles. IEEE Conf. Intell. Transp. Syst. Proc. ITSC 2013, 1468–1474. [Google Scholar] [CrossRef]
- Jing, S.; Hui, F.; Zhao, X.; Rios-Torres, J.; Khattak, A.J. Cooperative Game Approach to Optimal Merging Sequence and on-Ramp Merging Control of Connected and Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4234–4244. [Google Scholar] [CrossRef]
- He, Q.; Meng, X.; Qu, R.; Xi, R. Machine learning-based detection for cyber security attacks on connected and autonomous vehicles. Mathematics 2020, 8, 1311. [Google Scholar] [CrossRef]
- Pei, H.; Feng, S.; Zhang, Y.; Yao, D. A Cooperative Driving Strategy for Merging at On-Ramps Based on Dynamic Programming. IEEE Trans. Veh. Technol. 2019, 68, 11646–11656. [Google Scholar] [CrossRef]
- Min, H.; Fang, Y.; Wang, R.; Li, X.; Xu, Z.; Zhao, X. A Novel On-Ramp Merging Strategy for Connected and Automated Vehicles Based on Game Theory. J. Adv. Transp. 2020, 2020, 2529856. [Google Scholar] [CrossRef]
- Ye, F.; Guo, J.; Kim, K.J.; Orlik, P.V.; Ahn, H.; Di Cairano, S.; Barth, M.J. Bi-level optimal edge computing model for on-ramp merging in connected vehicle environment. IEEE Intell. Veh. Symp. Proc. 2019, 2019, 2005–2011. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.; Zhang, H.; Gartner, N.H.; Arsava, T. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment. J. Intell. Transp. Syst. Technol. Plan. Oper. 2017, 21, 136–147. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.; Pisu, P. Online Optimal Control of Connected Vehicles for Efficient Traffic Flow at Merging Roads. IEEE Conf. Intell. Transp. Syst. Proc. ITSC 2015, 2015, 2432–2437. [Google Scholar] [CrossRef]
- Ding, J.; Li, L.; Peng, H.; Zhang, Y. A Rule-Based Cooperative Merging Strategy for Connected and Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3436–3446. [Google Scholar] [CrossRef]
- Cao, W.; Mukai, M.; Kawabe, T.; Nishira, H.; Fujiki, N. Cooperative vehicle path generation during merging using model predictive control with real-time optimization. Control Eng. Pract. 2015, 34, 98–105. [Google Scholar] [CrossRef]
- Scarinci, R.; Heydecker, B.; Hegyi, A. Analysis of traffic performance of a ramp metering strategy using cooperative vehicles. IEEE Conf. Intell. Transp. Syst. Proc. ITSC 2013, 324–329. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. Automated and Cooperative Vehicle Merging at Highway On-Ramps. IEEE Trans. Intell. Transp. Syst. 2017, 18, 780–789. [Google Scholar] [CrossRef]
- Meng, T.; Xu, B.; Qin, X.; Huang, J.; Zhong, Z. Cooperative Ramp Merging Control for Connected and Automated Vehicles. SAE Technical Paper; Tsinghua University: Beijing, China, 2020. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, X.; Yin, G. Multi-objective optimal cooperative driving for connected and automated vehicles at non-signalized intersection. IET Intell. Transp. Syst. 2019, 13, 79–89. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value |
|---|---|
| , | 400, 200 |
| , | −3, 3 |
| , | 10, 30 |
| 1.5 | |
| 20 | |
| 0.4 |
| ID(Main Road) | Position (m) | ID (Ramp Road) | Position (m) |
|---|---|---|---|
| A | −264 | H | −249.5 |
| B | −330 | I | −290 |
| C | −378 | J | −327.5 |
| D | −420 | K | −360 |
| E | −464 | L | −395 |
| F | −532 | M | −447.5 |
| G | −600 | N | −501.5 |
| ID (Main Road) | O | P | Q | R |
|---|---|---|---|---|
| position (m) | −248 | −314 | −512 | −560 |
| ID (ramp road) | U | V | W | X |
| position (m) | −242 | −410 | −477.5 | −546.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Yuan, Z.; Yu, H.; Guo, Y.; Qi, Y. A Graph-Based Optimal On-Ramp Merging of Connected Vehicles on the Highway. Machines 2021, 9, 290. https://doi.org/10.3390/machines9110290
Shi Y, Yuan Z, Yu H, Guo Y, Qi Y. A Graph-Based Optimal On-Ramp Merging of Connected Vehicles on the Highway. Machines. 2021; 9(11):290. https://doi.org/10.3390/machines9110290
Chicago/Turabian StyleShi, Yanjun, Zhiheng Yuan, Hao Yu, Yijia Guo, and Yuhan Qi. 2021. "A Graph-Based Optimal On-Ramp Merging of Connected Vehicles on the Highway" Machines 9, no. 11: 290. https://doi.org/10.3390/machines9110290