Rolling bearings, as the most important supporting parts of rotating machinery are called “industrial joints”; the application of rolling bearings covers almost all industrial fields. The operating condition of rolling bearings directly affects the efficiency, productivity, and life of the equipment. In rotating machinery failures, bearing failures account for about 30% of all failures [
1,
2,
3]. In industrial sites, the complex working conditions of equipment bring great challenges for bearing fault diagnosis. There are more complex vibration disturbances between bearing components, and the collected vibration signals contain a large amount of interference noise, and the fault characteristics are difficult to be separated and easily drowned by the noise. Therefore, it is of great research value and practical significance to extract the weak signal characteristics of rolling bearings and grasp the operating status of bearings in time to realize early fault diagnosis. To solve this problem, many scholars have proposed different weak signal detection methods, such as Hilbert transform [
4], wavelet transform (WT) [
5], empirical mode decomposition (EMD) [
6], and variational mode decomposition [
7]. Morlet proposed the idea of “wavelet analysis” in 1984, and the wavelet transform can be used to analyze the signal to be measured in layers according to different scales, and to characterize the time-frequency properties of the signal locally [
8,
9]. The wavelet transform overcomes the limitation of the global nature of the traditional Fourier transform and solves the problem that the width of the window function of the Fourier transform is fixed. However, it is still limited by the difficulty of selecting the wavelet basis function and the difficulty of determining the scale range of wavelet decomposition. Empirical modal decomposition is an analysis method for adaptive processing of non-linear signals proposed by Dr. Huang et al. EMD decomposes the signal into several components of the basic model and one remaining item. The key to EMD is the ability to decompose a complex signal into a finite number of intrinsic mode functions (IMF), where the decomposed IMF components contain local features of the original signal at different time scales [
10,
11]. However, it still relies on the methods of finding extreme value points, envelope interpolation, and the selection of iterative termination criteria. Wu and Huang [
12] proposed the ensemble empirical mode decomposition (EEMD) method. White noise is added to the original signal to automatically assign signals of different time scales to appropriate reference scales. Yaguo Lei et al. [
13] used complete ensemble empirical mode decomposition with adaptive noise (CEEMDAN), which further reduces the modal effects by adding adaptive noise and has better convergence. Although both EEMD and CEEMDAN can effectively suppress the modal aliasing of EMD, they cannot effectively solve the endpoint effect problem. In 2014, Dragomiretskiy and Zosso proposed the variational mode decomposition (VMD) method. VMD uses an iterative search method to continuously update the center frequency and bandwidth of each BIMF component to obtain the optimal decomposition component and center frequency. Since VMD is influenced by the quadratic penalty factor and Lagrangian operator, the quadratic penalty factor can have good convergence characteristics and strict enforcement of constraints in the presence of noise [
14,
15]. VMD has a great advantage over EMD in that it has improved robustness to noise and can separate two similar frequencies from its construction and decomposition mode. Cancan Yi et al. [
16] proposed a fault feature extraction method based on a combination of VMD and particle swarm optimization algorithms. The optimal penalty function and the number of decompositions in particle swarm optimization VMD are used, the ratio of the maximum value of the mean and the variance of the number of interrelationships is defined as the fitness function, the maximum correlation kurtosis is used to select the optimal component, which can effectively identify the weak fault information of rolling bearings. Ming Zhang et al. [
17] proposed a new method for rolling bearing fault diagnosis based on VMD. The effects of gravity and unbalanced forces were considered, and the dynamic response models of faults at different locations were established. The performance of extracting bearing defect features in the simulated signals of rolling bearings with VMD and EMD was compared. The method was able to successfully diagnose rolling bearing faults. Tingkai Gong et al. [
18] proposed a method based on VMD and trend filtering, which uses trend filtering to simplify the spectrum of the original signal, and the criterion of kurtosis adaptively selects the regularization parameters of trend filtering, which can effectively identify the compound faults of rolling bearings. Chunguang Zhang et al. [
19] proposed a fault diagnosis method based on optimal VMD and resonant demodulation techniques. Combining genetic algorithms and non-linear programming algorithms, a new parameter optimization algorithm is designed to adaptively optimize two parameters of VMD. According to the maximum principle, the two most sensitive IMF components are selected for the reconstruction of the vibration signal. The reconstructed vibration signal is decomposed to obtain the envelope spectrum using the resonance demodulation technique, and the fault frequency of rolling bearings of locomotives is effectively identified. Xiwen Qin et al. [
20] proposed a fault identification method based on VMD and iterative random forest (IRF) classifier. Comparing the fault recognition effects of EMD and EEMD new number decomposition and the combination of three mainstream classifier methods, VMD-IRF can better identify rolling bearing faults. Tao Liang [
21] proposed a multi-objective multi-island genetic algorithm (MIGA) to optimize the VMD parameters and applied it to the feature extraction of bearing faults. The envelope entropy and renyi entropy are used as the fitness function to obtain the optimal solution of the VMD parameter using the MIGA algorithm. The two IMF with the most fault information is selected for reconstruction using the improved kurtosis and Holder coefficients. This method can extract the bearing fault characteristics more accurately. All of the above methods are based on noise suppression or elimination of noise in the vibration signal to identify fault characteristics. However, the process of denoising damages the weak fault features submerged in the strong noise background and cannot retain the complete fault signal, and its weak signal detection performance is limited. Stochastic resonance is the use of noise through a non-linear system to enhance the weak fault characteristics, which has certain advantages in weak signal detection.
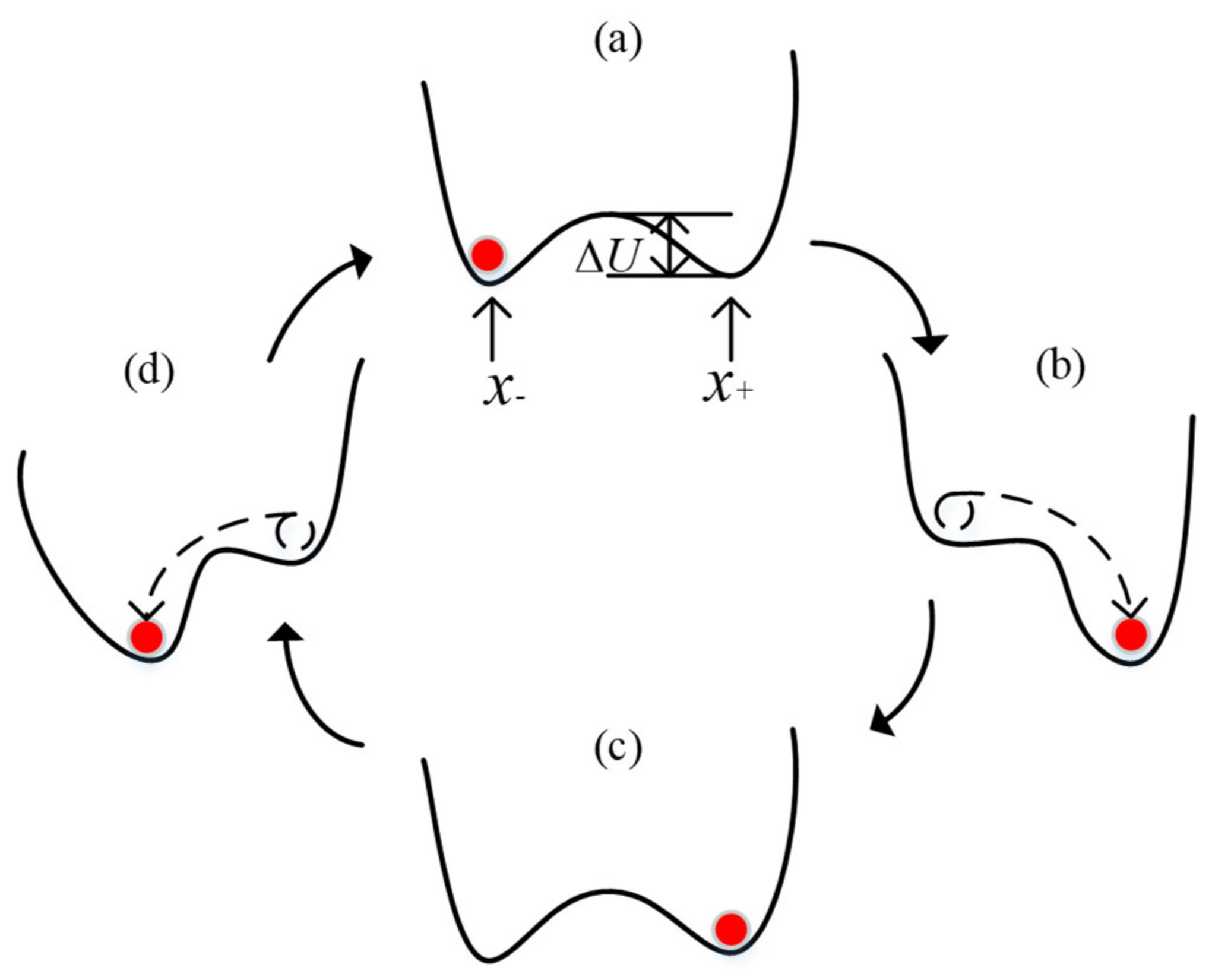
The concept of stochastic resonance (SR) was originally proposed by Benzi et al. [
22] and used to explain the ancient glaciers meteorological issues, has since been used to describe non-linear systems in which the presence of internal or external noise can increase the response of the system output. In rotating machinery fault detection, the main research has focused on the application of a single stochastic resonance-enhanced single fault signal in weak feature extraction [
23,
24]. However, when the signal-to-noise ratio of the vibration signal is low, the detection effect of a single SR is difficult to identify multiple fault types of bearings. The actual bearing fault signal is composed of a series of complex multi-component signals containing multiple fault feature information, so multiple frequency components should be enhanced to distinguish different fault types in bearings. To solve the above problem, it is necessary to investigate the stochastic resonance enhancement technique of cascaded stochastic resonance [
25]. Cascaded stochastic resonance is a single series-connected bistable system that achieves noise reuse through multiple filtering processes, further weakening high-frequency vibrations to make the output waveform smoother and the useful signal characteristics more obvious. Therefore, cascaded stochastic resonance is more advantageous than individual stochastic resonance in processing weak signals. Peiming Shi et al. [
26] proposed an empirical mode decomposition method based on the denoising of cascaded multi-stable stochastic resonance systems. Using the cascaded multi-stable stochastic resonance system (CMSRS) as a denoising preprocessor, the energy is gradually transferred from high to low frequencies, and the denoised signal is decomposed using empirical mode decomposition. The method can gradually remove high-frequency noise, reduce the number of decomposition layers, improve low-frequency signal energy, and effectively identify bearing fault characteristic signals. Whether a single stochastic resonance method or a stochastic resonance enhancement method is used to extract useful characteristics in vibration signals, there is a common problem of how to select the appropriate system parameters to generate stochastic resonance. For this reason, adaptive stochastic resonance algorithms have been developed in the last decade [
27,
28]. Siqi Gong et al. [
29] proposed a new method for weak signal detection based on wavelet transform and parameter optimization for bistable stochastic resonance. The wavelet coefficients are adjusted according to the variance of each detail and approximation coefficient and the frequency band in which the signal is located using the wavelet coefficients. The parameters of the stable stochastic resonance model are selected by the a priori information of the signal, and then the model parameters are adjusted according to the calculated local signal-to-noise ratio. This method can effectively detect weak signal characteristics hidden in strong noise. Z. H. Lai et al. [
30] proposed an adaptive multi-parameter tuned stochastic resonance method for bistable systems based on particle swarm optimization algorithm, which generates optimal SR output by adaptively adjusting multiple parameters to achieve fault feature extraction and further fault diagnosis of rolling bearings. However, the cascaded bistable stochastic system involves multiple model parameters, the system parameters are difficult to adjust, the adjustment process is time-consuming, and engineers with insufficient experience may be unable to obtain the optimal SR output. Importantly, this makes the method of implementing stochastic resonance and fault diagnosis in practical engineering inefficient and unreliable. To solve these problems, various adaptive parameter tuning methods have been proposed and studied using multi-parameter optimization algorithms, such as particle swarm optimization [
31] and genetic algorithms [
32], which can implement stochastic resonance online in an efficient and highly reliable manner. To further improve the detection performance of the adaptive stochastic resonance method and extend its application in fault diagnosis, it is necessary to consider multiple parameters and propose the corresponding adaptive multi-parameter tuning cascaded stochastic resonance method.
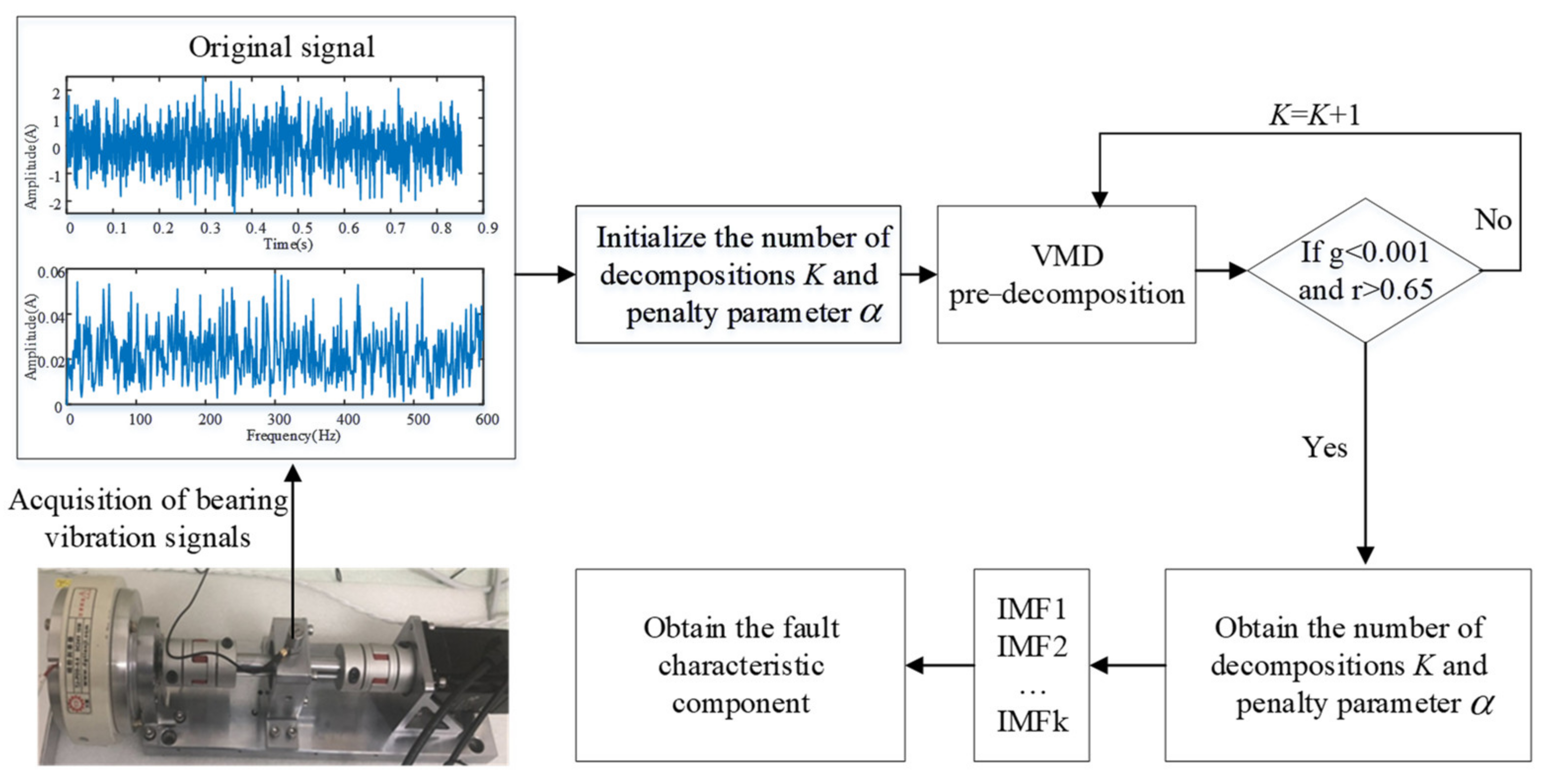
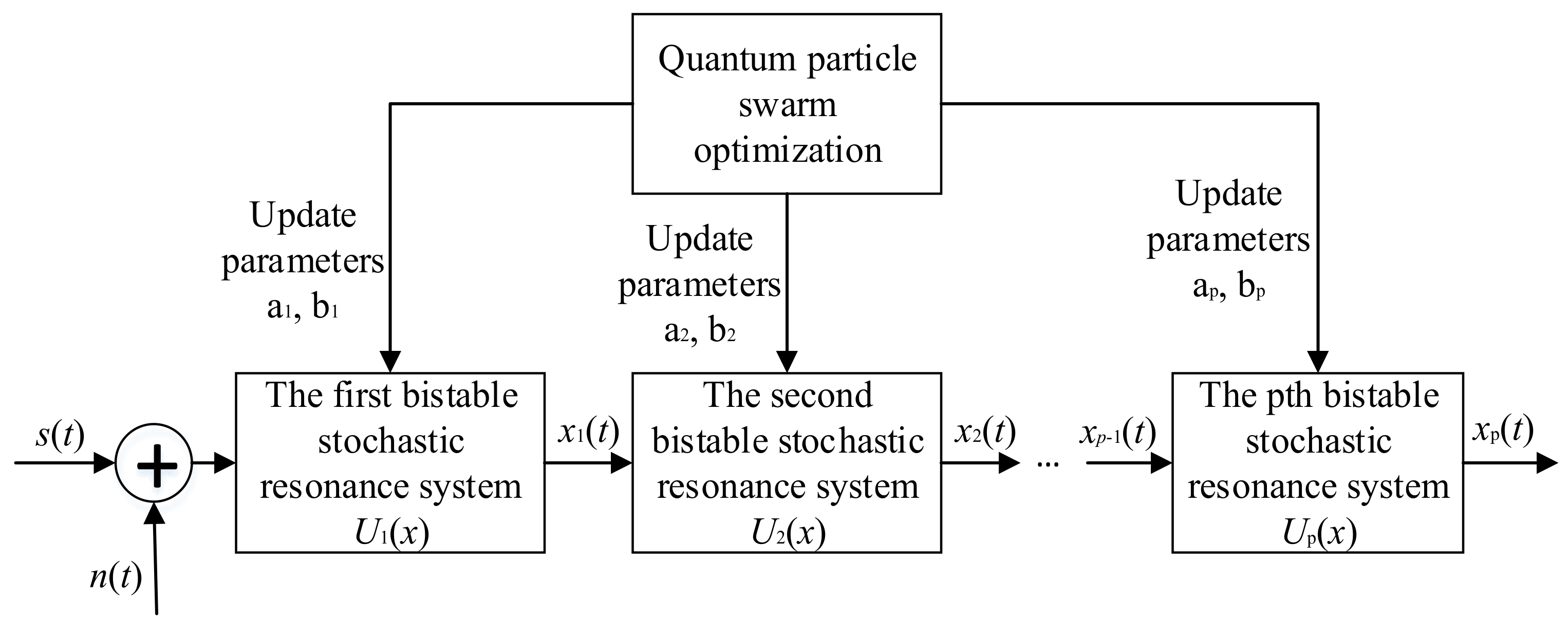
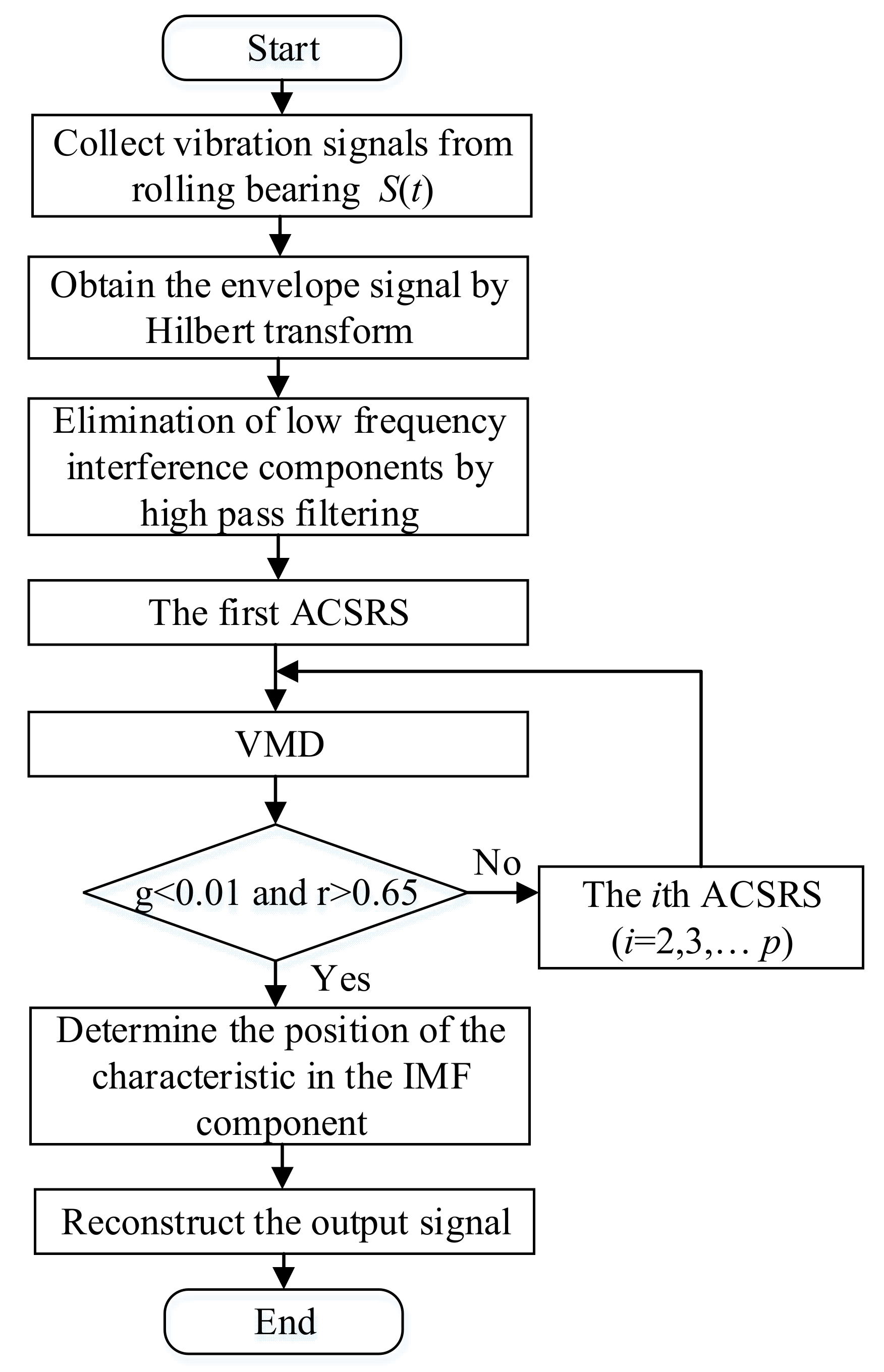
In summary, to achieve the detection of rolling bearing weak signals under strong background noise, combining the respective advantages of noise reduction and signal enhancement methods, this paper proposes an adaptive cascaded stochastic resonance method for decomposition and reconstruction of rolling bearing multi-frequency weak signals. Firstly, the original vibration signal is subjected to Hilbert transform to obtain the envelope signal, the envelope signal is high-pass filtered to eliminate the interference of low-frequency components on the response of the stochastic resonance system, the high-pass filtered signal is input to the ACSRS for signal enhancement, and the quantum particle swarm algorithm is used for adaptive optimization of the parameters in the cascaded stochastic resonance. Secondly, the enhanced signal after adaptive cascaded stochastic resonance is decomposed using the variational mode decomposition, and the energy loss coefficient and correlation coefficient are used to jointly determine the position of the characteristic frequency in the IMF component. The method can reduce the number of VMD decomposition layers while adaptively seeking the optimization of the parameters of the stochastic resonance system, so that the energy of the high-frequency noise is transferred to the low-frequency fault characteristic component, thus enhancing the fault characteristic information in the weak signal. Finally, the enhanced multi-frequency weak signal is reconstructed, which provides some reference ideas and methods for rolling bearing weak signal detection.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}