
Key-Phase-Free Blade Tip-Timing for Nonstationary Test Conditions: An Improved Algorithm for the Vibration Monitoring of a SAFRAN Turbomachine from the Surveillance 9 International Conference Contest


Abstract
:1. Introduction
- Under the assumption of constant rotational speed, with only one tip-timing sensor, the methodology is blind to synchronous vibration (i.e., integral order), as only asynchronous vibration can be effectively pictured [8];
- A vibration response acquired at a single measurement location sampled at the rotation rate. A frequency spectrum will then feature aliasing for all the frequency components larger than half the rotation rate (i.e., the Nyquist limit) [8].
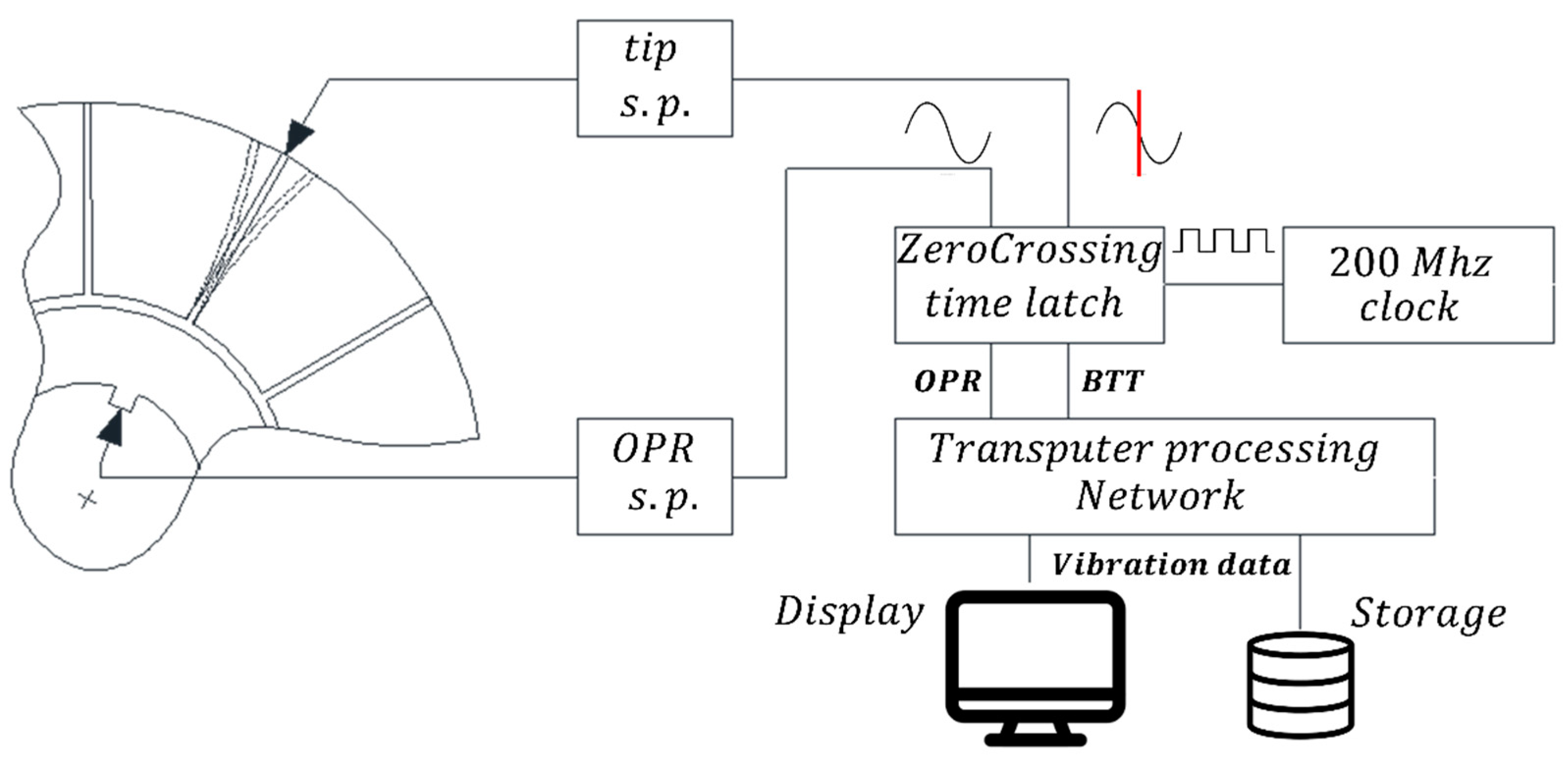
- clock resolution (i.e., the time of arrival—ToA—of the blades are compared to an internal clock having a given resolution),
- sensors vibration (i.e., the tip-timing and OPR probe are usually mounted on the casing, which vibrates during the turbomachine operation),
- geometric errors of the blade mounting (i.e., the blades will never be perfectly equi-spaced),
- non-stationarity (i.e., some algorithms assume uniform rotational speed, but speed fluctuations or fast accelerations may lead to additional error).
2. BTT Methodology: From the Traditional Algorithms to the Proposed Improvement
2.1. Traditional BTT
2.2. The Proposed Improvement
- the OPR and root sensors-free approach in [13] is based on the reconstruction of the OPR signal and has then a non-uniform error in the estimate of the vibration of the different blades. This is mathematically proven in [13], by analyzing the error propagation of the final formula derived by Equations (1)–(3). In fact, as established in [13], the reconstructed vibration for the m-th blade at j-th cycle in angular fraction a-dimensional units (i.e., blade displacement divided by ), can be written as:where is estimated with Equation (5), and is the theoretical angular ratio of the m-th blade (i.e., a constant equal to , as in Equation (3), if the assumption of perfectly spaced blades holds, and the reconstructed OPR position corresponds to the M-1-th blade position), which can be substituted by the true angular ratio when available (N.B., commonly an estimation of such a geometrical error is done to characterize the rotor under analysis in a sort of calibration procedure). In [13] it is proved that such a formulation leads to a parabolic trend for the squared vibration error (i.e., maximum error for the blades and near the OPR position, and minimum for the mid-blades ), effect which is undesirable as may act as a confounding influence in a diagnostic system.
- in [8] it is said that the error in the standard OPR based methodology can be reduced if multiple OPR probes are used to update the datum times at various points in a single revolution.
- the OPR and root sensors-free approach in [8] (i.e., Blade Tip Time Averaging—Ives (1986)), is presumed to be based on the reconstruction of the root signal of a blade at a given rotation as the average of the tip timings of that blade in adjacent rotations (Equation (4)). This had the advantage of a direct vibration estimation bypassing the OPR signal reconstruction and the geometric error issue (i.e., the calibration of the for the different blades is not needed). The drawback is that, in non-stationary conditions, the average cannot involve too many cycles, otherwise the stationarity assumption will not hold anymore. On the contrary, in stationary conditions, if synchronous vibration is predominant, a vibrating blade could deflect of the same amount in following cycles when passing the BTT sensor, leading to an erroneous zero vibration value.
3. Surveillance 9 Contest Test-Rig and Data Description
- the number of blades;
- the precise angles between each pair of consecutive blades (noting blade # 1, 2, 3 … the first, second, third… blade passing in front of sensor 1);
- which blade is passing first on sensors 2 and 3;
- the direction of rotation (a blade is passing successively over sensor 1, 2, 3 or 1, 3, 2);
- the angular position of sensors 2 and 3, assuming sensor 1 is at 0 degree, with a rotation direction defined by the rotation of the turbine.
3.1. Number of Blades
3.2. Precise Angle between Consecutive Blades
3.3. First Blade in Front of the Different Sensors and Direction of Rotation
3.4. Angular Position of Sensors 2 & 3 with Respect to Sensor 1
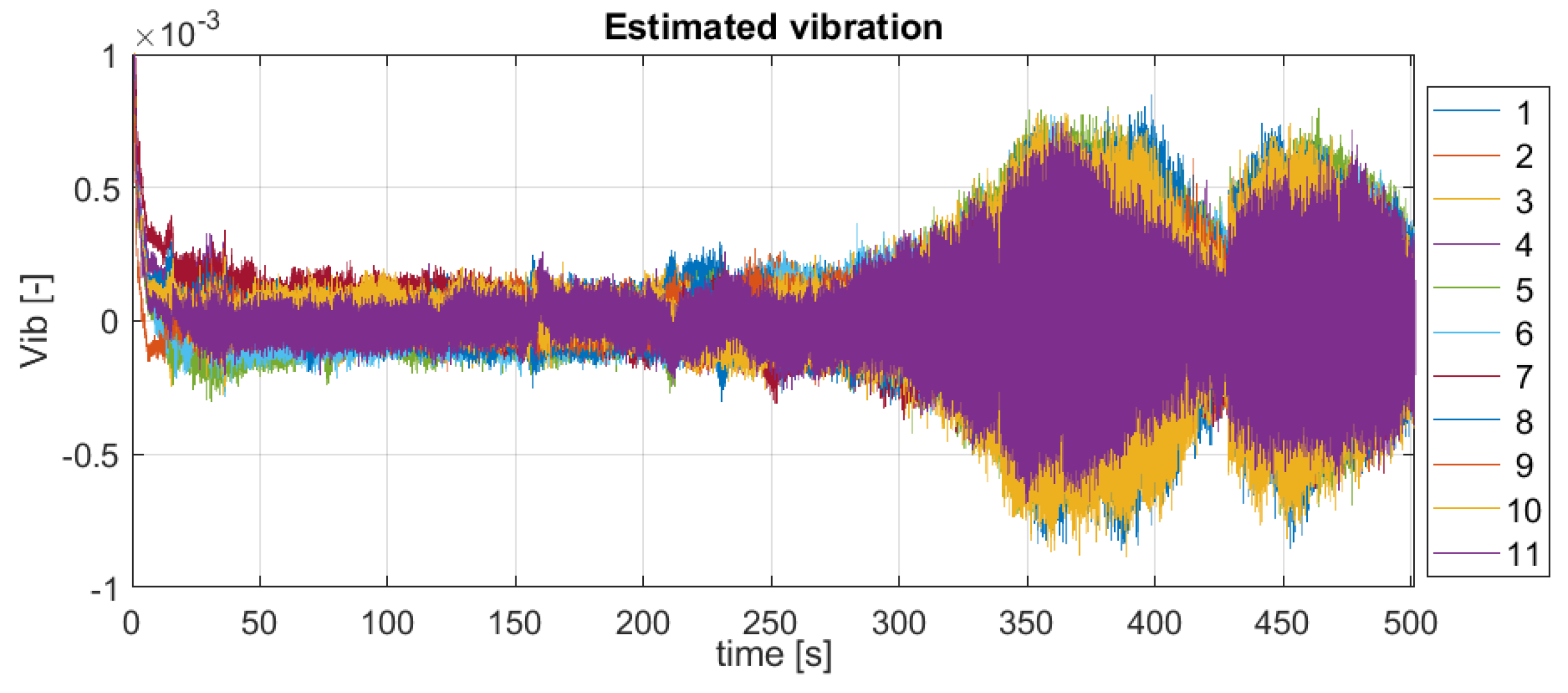
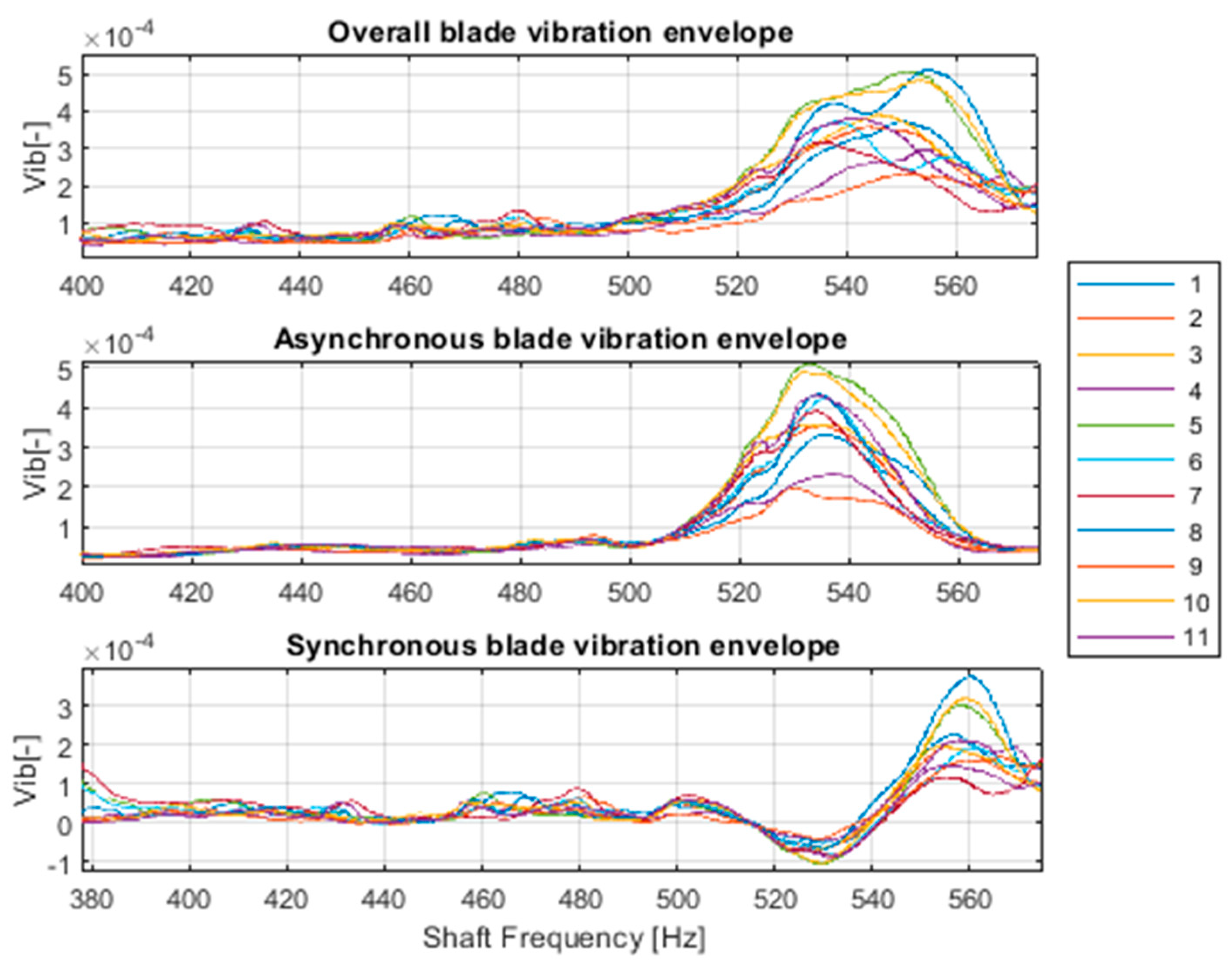
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Symbols and Abbreviations
| BTT | Blade Tip Timing |
| ToA | Time of Arrival |
| OPR | Once Per Revolution |
| Number of blades | |
| Blade index | |
| Cycle index | |
| ) | |
| Total number of cycles | |
| Tip ToA | |
| Root ToA | |
| OPR ToA | |
| Tip radius | |
| Shaft frequency | |
| Instantaneous shaft angular speed | |
| Instantaneous period of the shaft rotation |
References
- Prochazka, P.; Vanek, F. New Methods of Noncontact Sensing of Blade Vibrations and Deflections in Turbomachinery. IEEE Trans. Instrum. Meas. 2013, 63, 1583–1592. [Google Scholar] [CrossRef]
- Battiato, G.; Firrone, C.M.; Berruti, T. Forced response of rotating bladed disks: Blade Tip-Timing measurements. Mech. Syst. Signal Process. 2017, 85, 912–926. [Google Scholar] [CrossRef]
- Wang, Z.K.; Yang, Z.B.; Wu, S.M.; Li, H.Q.; Tian, S.H.; Chen, X.F. An improved multiple signal classification for non-uniform sampling in blade tip timing. IEEE Trans. Instrum. Meas. 2020, 69, 7941–7952. [Google Scholar] [CrossRef]
- Heath, S.; Imregun, M. A Survey of Blade Tip-Timing Measurement Techniques for Turbomachinery Vibration. J. Eng. Gas Turbines Power 1998, 120, 784–791. [Google Scholar] [CrossRef]
- Zablotskiy, I.Y.; Korostelev, Y.A. Measurement of Resonance Vibrations of Turbine Blades with the Elura Device. Energomashi-Nostroneniye 1970, 36–39. [Google Scholar]
- Hohenberg, R. Detection and study of compressor-blade vibration. Exp. Mech. 1967, 7, 19A–24A. [Google Scholar] [CrossRef]
- Heath, S.; Imregun, M. An improved single-parameter tip-timing method for turbomachinery blade vibration measurements using optical laser probes. Int. J. Mech. Sci. 1996, 38, 1047–1058. [Google Scholar] [CrossRef]
- Heat, S. A Study of Tip-Timing Measurement Techniques for the Determination of Bladed-Disk Vibration Characteristics. Ph.D. Thesis, Imperial College, London, UK, 1997. [Google Scholar]
- Carrington, I.B.; Wright, J.R.; Cooper, J.; Dimitriadis, G. A comparison of blade tip timing data analysis methods. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2001, 215, 301–312. [Google Scholar] [CrossRef]
- Wang, W.; Ren, S.; Huang, S.; Li, Q.; Chen, K. New Step to Improve the Accuracy of Blade Synchronous Vibration Parameters Identification Based on Combination of GARIV and LM Algorithm. In Proceedings of the ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition, American Society of Mechanical Engineers, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar] [CrossRef]
- Guo, H.; Duan, F.; Zhang, J. Blade resonance parameter identification based on tip-timing method without the once-per revolution sensor. Mech. Syst. Signal Process. 2016, 66-67, 625–639. [Google Scholar] [CrossRef]
- Wang, Z.K.; Yang, Z.B.; Wu, S.M.; Li, H.Q.; Yan, R.Q.; Tian, S.H.; Zhang, X.W.; Chen, X.F. An OPR-free blade tip timing method based on blade spacing change. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Ottawa, ON, Canada, 16–19 May 2020. [Google Scholar]
- He, C.; Antoni, J.; Daga, A.P.; Li, H.; Chu, N.; Lu, S.; Li, Z. An Improved Key-Phase-Free Blade Tip-Timing Technique for Nonstationary Test Conditions and Its Application on Large-Scale Centrifugal Compressor Blades. IEEE Trans. Instrum. Meas. 2020, 70, 1–16. [Google Scholar] [CrossRef]
- Wu, S.; Zhao, Z.; Yang, Z.; Tian, S.; Yang, L.; Chen, X. Physical constraints fused equiangular tight frame method for Blade Tip Timing sensor arrangement. Measurement 2019, 145, 841–851. [Google Scholar] [CrossRef]
- Hu, Z.; Lin, J.; Chen, Z.-S.; Yang, Y.-M.; Li, X.-J. A Non-Uniformly Under-Sampled Blade Tip-Timing Signal Reconstruction Method for Blade Vibration Monitoring. Sensors 2015, 15, 2419–2437. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Hu, Z.; Chen, Z.-S.; Yang, Y.-M.; Xu, H.-L. Sparse reconstruction of blade tip-timing signals for multi-mode blade vibration monitoring. Mech. Syst. Signal Process. 2016, 81, 250–258. [Google Scholar] [CrossRef]
- Pan, M.; Yang, Y.; Guan, F.; Hu, H.; Xu, H. Sparse Representation Based Frequency Detection and Uncertainty Reduction in Blade Tip Timing Measurement for Multi-Mode Blade Vibration Monitoring. Sensors 2017, 17, 1745. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, S.; Russhard, P.; Yan, R.; Tian, S.; Wang, S.; Zhao, Z.; Chen, X. An Adaptive Online Blade Health Monitoring Method: From Raw Data to Parameters Identification. IEEE Trans. Instrum. Meas. 2020, 69, 2581–2592. [Google Scholar] [CrossRef]
- Salhi, B.; Lardiès, J.; Berthillier, M.; Voinis, P.; Bodel, C. Modal parameter identification of mistuned bladed disks using tip timing data. J. Sound Vib. 2008, 314, 885–906. [Google Scholar] [CrossRef]
- Rossi, G.; Brouckaert, J.F. Design of blade tip timing measurements systems based on uncertainty analysis. In Proceedings of the 58th International Instrumentation Symposium, San Diego, CA, USA, 4–8 June 2020; pp. 4–8. [Google Scholar]
- Ren, S.; Xiang, X.; Zhao, W.; Zhao, Q.; Wang, C.; Xu, Q. An error correction blade tip-timing method to improve the measured accuracy of blade vibration displacement during unstable rotation speed. Mech. Syst. Signal Process. 2021, 162, 108030. [Google Scholar] [CrossRef]
- Liu, Z.; Duan, F.; Niu, G.; Ma, L.; Jiang, J.; Fu, X. An Improved Circumferential Fourier Fit (CFF) Method for Blade Tip Timing Measurements. Appl. Sci. 2020, 10, 3675. [Google Scholar] [CrossRef]
- Dimitriadis, G.; Carrington, I.; Wright, J.; Cooper, J. Blade-tip timing measurement of synchronous vibrations of rotating bladed assemblies. Mech. Syst. Signal Process. 2002, 16, 599–622. [Google Scholar] [CrossRef]
- Daga, A.P.; Garibaldi, L. Machine Vibration Monitoring for Diagnostics through Hypothesis Testing. Information 2019, 10, 204. [Google Scholar] [CrossRef] [Green Version]
- Daga, A.P.; Fasana, A.; Marchesiello, S.; Garibaldi, L. The Politecnico di Torino rolling bearing test rig: Description and analysis of open access data. Mech. Syst. Signal Process. 2018, 120, 252–273. [Google Scholar] [CrossRef]
- Castellani, F.; Garibaldi, L.; Daga, A.P.; Astolfi, D.; Natili, F. Diagnosis of Faulty Wind Turbine Bearings Using Tower Vibration Measurements. Energies 2020, 13, 1474. [Google Scholar] [CrossRef] [Green Version]
- Daga, A.P.; Fasana, A.; Garibaldi, L.; Marchesiello, S. Big Data management: A Vibration Monitoring point of view. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Rome, Italy, 3–5 June 2020; pp. 548–553. [Google Scholar]
- Natili, F.; Daga, A.P.; Castellani, F.; Garibaldi, L. Multi-Scale Wind Turbine Bearings Supervision Methods Using Industrial SCADA and Vibration Data. Appl. Sci. 2021, 11, 6785. [Google Scholar] [CrossRef]
- Daga, A.P.; Garibaldi, L.; Bonmassar, L. Turbomolecular high-vacuum pump bearings diagnostics using temperature and vibration measurements. In Proceedings of the IEEE International Workshop on Metrology for Industry, Rome, Italy, 7–9 June 2021; pp. 264–269. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, X. An Overview on Fault Diagnosis, Prognosis and Resilient Control for Wind Turbine Systems. Processes 2021, 9, 300. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samp | 1–2 | 2–3 | 3–4 | 4–5 | 5–6 | 6–7 | 7–8 | 8–9 | 9–10 | 10–11 | 11–1 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Probe1 | 32.50 | 32.90 | 32.74 | 32.72 | 32.72 | 32.78 | 32.58 | 32.78 | 32.82 | 32.71 | 32.74 |
| Probe2 | 32.69 | 32.72 | 32.82 | 32.53 | 32.79 | 32.85 | 32.68 | 32.76 | 32.46 | 32.93 | 32.76 |
| Probe3 | 32.73 | 32.82 | 32.56 | 32.78 | 32.83 | 32.69 | 32.75 | 32.46 | 32.94 | 32.72 | 32.73 |
| Blades | 1–2 | 2–3 | 3–4 | 4–5 | 5–6 | 6–7 | 7–8 | 8–9 | 9–10 | 10–11 | 11–1 |
| Probe1 | 32.50 | 32.90 | 32.74 | 32.72 | 32.72 | 32.78 | 32.58 | 32.78 | 32.82 | 32.71 | 32.74 |
| Blades | 4–5 | 5–6 | 6–7 | 7–8 | 8–9 | 9–10 | 10–11 | 11–1 | 1–2 | 2–3 | 3–4 |
| Probe2 | 32.69 | 32.72 | 32.82 | 32.53 | 32.79 | 32.85 | 32.68 | 32.76 | 32.46 | 32.93 | 32.76 |
| Blades | 5–6 | 6–7 | 7–8 | 8–9 | 9–10 | 10–11 | 11–1 | 1–2 | 2–3 | 3–4 | 4–5 |
| Probe3 | 32.73 | 32.82 | 32.56 | 32.78 | 32.83 | 32.69 | 32.75 | 32.46 | 32.94 | 32.72 | 32.73 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Daga, A.P.; Garibaldi, L.; He, C.; Antoni, J. Key-Phase-Free Blade Tip-Timing for Nonstationary Test Conditions: An Improved Algorithm for the Vibration Monitoring of a SAFRAN Turbomachine from the Surveillance 9 International Conference Contest. Machines 2021, 9, 235. https://doi.org/10.3390/machines9100235
Daga AP, Garibaldi L, He C, Antoni J. Key-Phase-Free Blade Tip-Timing for Nonstationary Test Conditions: An Improved Algorithm for the Vibration Monitoring of a SAFRAN Turbomachine from the Surveillance 9 International Conference Contest. Machines. 2021; 9(10):235. https://doi.org/10.3390/machines9100235
Chicago/Turabian StyleDaga, Alessandro Paolo, Luigi Garibaldi, Changbo He, and Jerome Antoni. 2021. "Key-Phase-Free Blade Tip-Timing for Nonstationary Test Conditions: An Improved Algorithm for the Vibration Monitoring of a SAFRAN Turbomachine from the Surveillance 9 International Conference Contest" Machines 9, no. 10: 235. https://doi.org/10.3390/machines9100235