Development and Testing of a Methodology for the Assessment of Acceptability of LKA Systems



Abstract
:1. Introduction
2. Acceptability
3. LKA
4. The Criticalities Study
5. The Driving Simulator
6. Virtual LKA
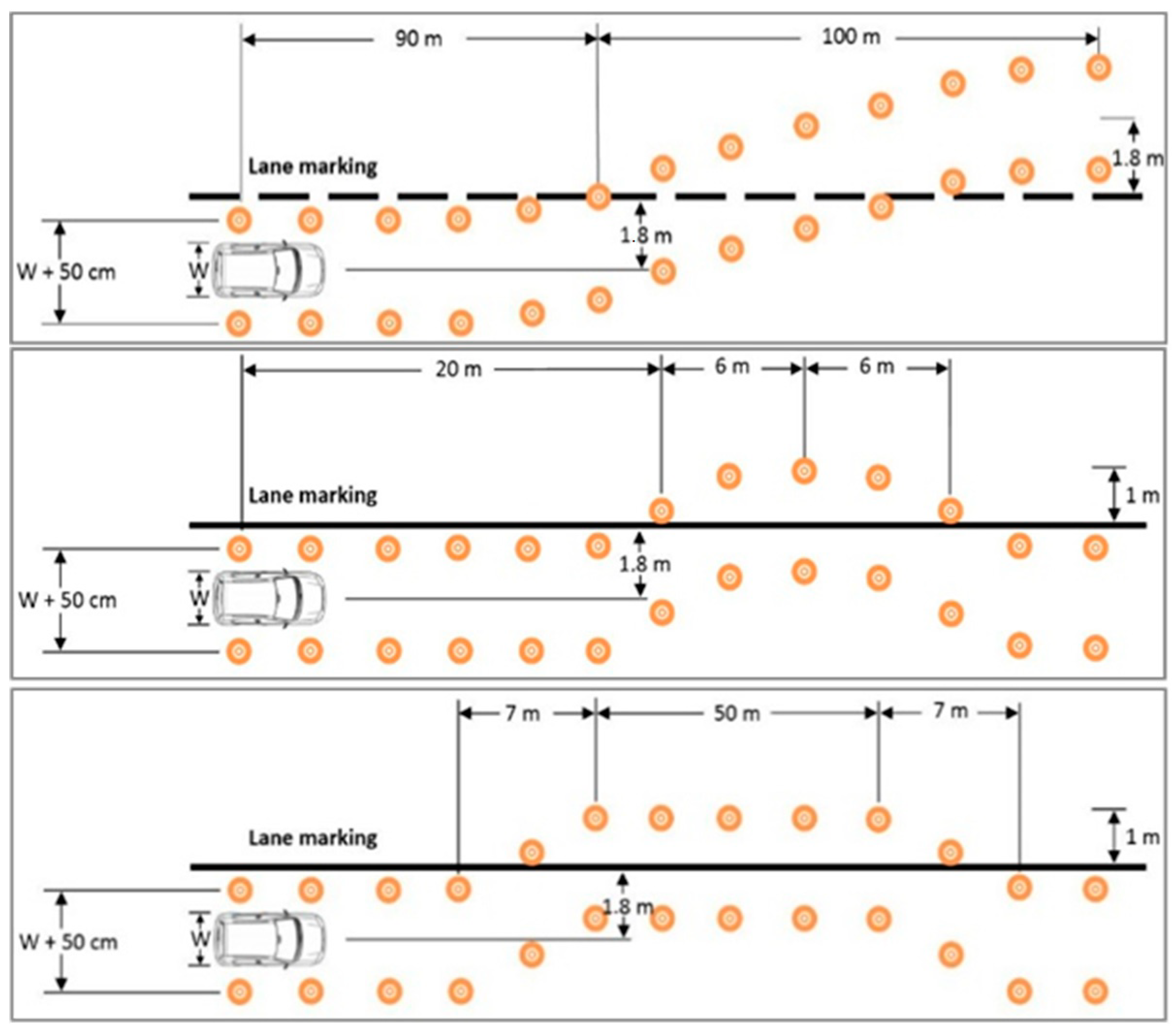
7. Methods and Processes
- Distance (meters) needed to recover full control of the vehicle;
- Width “peak–peak” (% of the steering wheel oscillations);
- Max torque (N∙m) exerted on the steering wheel.
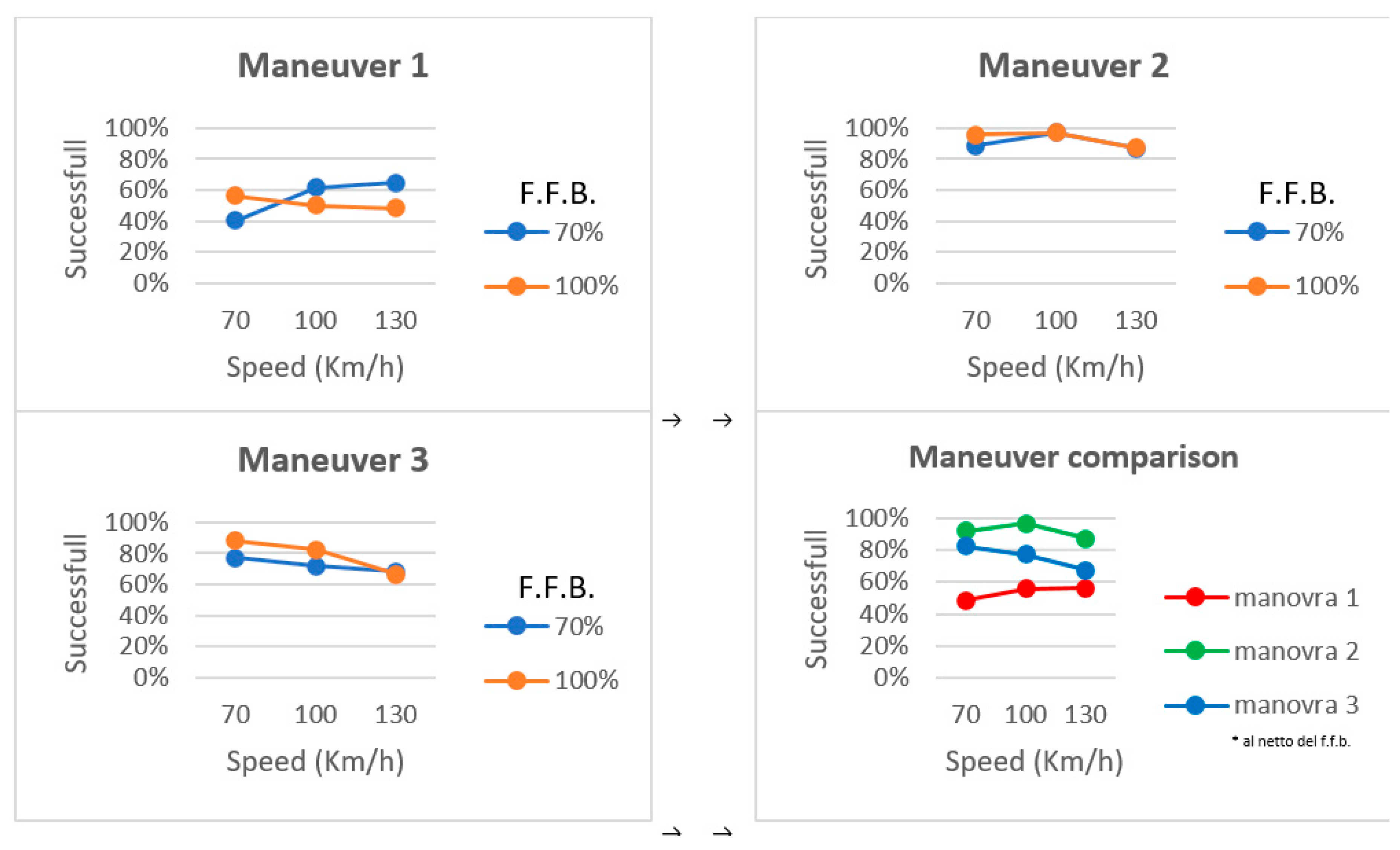
8. Results
9. Survey
- Confidence/high satisfaction: Subjects with answer’s average higher than 5 on the Likert scale;
- Confidence/low satisfaction: Subjects with answer’s average lower than 5 on the Likert scale.
10. Conclusions
11. Prospective Developments
Author Contributions
Funding
Conflicts of Interest
Appendix A
- -
- (a)–(b) report the distances according to F.F.B. and speed;
- -
- (c)–(d) report the oscillations of the steering wheel according to F.F.B. and speed;
- -
- (e)–(f) report the maximum torque exerted by the driver during the tasks.




References
- Cacciabue, P.C. Simulation of Driver Behaviour. In Modelling Driver Behaviour in Automotive Environments: Critical Issues in Driver Interactions with Intelligent Transport Systems, 1st ed.; Cacciabue, P.C., Ed.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 344–375. [Google Scholar]
- De Waard, D.; Van der Hulst, M.; Hoedemaeker, M.; Brookhuis, K.A. Driver Behavior in an Emergency Situation in the Automated Highway System. Transp. Hum. Factors 1999, 1, 67–82. [Google Scholar] [CrossRef]
- Brookhuis, K.A.; De Waard, D. ADAS’ acceptance and effects on behaviour: The consequences of automation. In Traffic and Transport Psychology: Theory and Application, 1st ed.; Underwood, G., Ed.; Elsevier: Amsterdam, The Netherlands, 2005; pp. 273–278. [Google Scholar]
- Stanton, N.A.; Young, M.S. Vehicle automation and driving performance. Ergonomics 1998, 41, 1014–1028. [Google Scholar] [CrossRef]
- Polychronopoulos, A.; Möhler, N.; Ghosh, S.; Beutner, A. System design of a situation adaptive lane keeping support system, the SAFELANE system. In Advanced Microsystems for Automotive Applications; Springer: Berlin/Heidelberg, Germany, 2005; pp. 169–183. [Google Scholar]
- Pappalardo, C.M.; Guida, D. An inverse dynamics approach based on the fundamental equations of constrained motion and on the theory of optimal control. In Proceedings of the 24th Conference of the Italian Association of Theoretical and Applied Mechanics, AIMETA 2019, Lecture Notes in Mechanical Engineering, Rome, Italy, 15–19 September 2019; pp. 336–352. [Google Scholar]
- Saleh, L.; Chevrel, P.; Claveau, F.; Lafay, J.F.; Mars, F. Shared Steering Control between a Driver and an Automation: Stability in the Presence of Driver Behavior Uncertainty. IEEE Trans. Intell. Transp. Syst. 2013, 14, 974–983. [Google Scholar] [CrossRef]
- Sarter, N.B.; Woods, D.D. Situation awareness: A critical but ill-defined phenomenon. Int. J. Aviat. Psychol. 1991, 1, 43–55. [Google Scholar] [CrossRef]
- Hancock, P.A.; Parasuraman, R. Human factors and safety in the design of intelligent vehicle-highway systems. J. Saf. Res. 1992, 23, 181–198. [Google Scholar] [CrossRef]
- Batavia, P.H. Driver-Adaptive Lane Departure Warning Systems. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 1999. [Google Scholar]
- Peng, H. Evaluation of driver assistance systems—A human centered approach. In Proceedings of the International Symposium on Advanced Vehicle Control (AVEC), Hiroshima, Japan, 9–13 September 2002; pp. 17–24. [Google Scholar]
- Takada, Y.; Boer, E.R.; Sawaragi, T. Driver assist system for human–machine interaction. Cogn. Technol. Work 2017, 19, 819–836. [Google Scholar] [CrossRef]
- Tsoi, K.K.; Mulder, M.; Abbink, D.A. Balancing safety and support: Changing lanes with a haptic lane-keeping support system. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Bari, Italy, 6–9 October 2010; pp. 1236–1243. [Google Scholar]
- Carsten, O.; Nilsson, L. Safety Assessment of Driver Assistance Systems. Eur. J. Transp. Infrastruct. Res. 2001, 1, 225–243. [Google Scholar]
- Ding, J.; Wang, J.; Liu, C.; Lu, M.; Li, K. Driver steering behavior model based on lane-keeping characteristics analysis. In Proceedings of the 17th International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 623–628. [Google Scholar]
- Pauzie, A.; Orfila, O. Methodologies to assess usability and safety of ADAS and automated vehicle. IFAC Pap. 2016, 49, 072–077. [Google Scholar] [CrossRef]
- Rudin-Brown, C.; Ian Noy, Y. Investigation of Behavioral Adaptation to Lane Departure Warnings. Transp. Res. Rec. J. Transp. Res. Board 2002, 1803, 30–37. [Google Scholar] [CrossRef]
- Sicilia, M.; De Simone, M.C. Development of an Energy Recovery Device Based on the Dynamics of a Semi-trailer. In Proceedings of the 3rd International Conference on Design, Simulation, Manufacturing: The Innovation Exchange, DSMIE 2020, Lecture Notes in Mechanical Engineering, Kharkiv, Ukraine, 9–12 June 2020; pp. 74–84. [Google Scholar]
- De Simone, M.C.; Guida, D. Experimental investigation on structural vibrations by a new shaking table. In Proceedings of the 24th Conference of the Italian Association of Theoretical and Applied Mechanics, AIMETA 2019, Lecture Notes in Mechanical Engineering, Rome, Italy, 15–19 September 2019; pp. 819–831. [Google Scholar]
- Scerbo, M.W. Theoretical perspectives on adaptive automation. In Automation and Human Performance: Theory and Applications, 1st ed.; Parasuraman, R., Mouloua, M., Eds.; Lawrence Erlbaum Associates: Mahwah, NJ, USA, 1996; pp. 37–63. [Google Scholar]
- Sentouh, C.; Soualmi, B.; Popieul, J.C.; Debernard, S. Cooperative Steering Assist Control System. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013; pp. 941–946. [Google Scholar]
- Sato, K.; Goto, T.; Kubota, Y.; Amno, Y.; Fukui, K. A study on a Lane Departure Warning System using a Steering Torque as Warning Signal. In Proceedings of the International Symposium on Advanced Vehicle Control (AVEC), Nagoya, Japan, 14–18 September 1998; pp. 479–484. [Google Scholar]
- Shimakage, M.; Satoh, S.; Uenuma, K. Design of lane-keeping control with steering torque input. JSAE Rev. 2002, 23, 317–323. [Google Scholar] [CrossRef]
- Manca, A.G.; Pappalardo, C.M. Topology optimization procedure of aircraft mechanical components based on computer-aided design, multibody dynamics, and finite element analysis. In Proceedings of the 3rd International Conference on Design, Simulation, Manufacturing: The Innovation Exchange, DSMIE 2020, Lecture Notes in Mechanical Engineering, Kharkiv, Ukraine, 9–12 June 2020; pp. 159–168. [Google Scholar]
- Wang, C.; Wang, Y.; Wagner, J.R. Evaluation of Alternative Steering Devices with Adjustable Haptic Feedback for Semi-Autonomous and Autonomous Vehicles; SAE: Warrendale, PA, USA, 2018. [Google Scholar]
- Bian, Y.; Ding, J.; Hu, M.; Xu, Q.; Wang, J.; Li, K. An Advanced Lane-Keeping Assistance System with Switchable Assistance Modes. IEEE Trans. Intell. Transp. Syst. 2020, 21, 385–396. [Google Scholar] [CrossRef]
- Iwano, K.; Raksincharoensak, P.; Nagai, M. A study on shared control between the driver and an active steering control system in emergency obstacle avoidance situations. In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 24–29 August 2014; pp. 6338–6343. [Google Scholar]
- National Automotive Sampling System General Estimates System (NASS GES). Available online: https://www.nhtsa.gov/national-automotive-sampling-system-nass/nass-general-estimates-system (accessed on 4 July 2019).
- Fatality Analysis Reporting System (FARS). Available online: https://www.nhtsa.gov/research-data/fatality-analysis-reporting-system-fars (accessed on 4 July 2019).
- Villecco, F. On the Evaluation of Errors in the Virtual Design of Mechanical Systems. Machines 2018, 6, 36. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, K.; Jansson, H. An analysis of driver’s steering behaviour during auditory or haptic warnings for the designing of lane departure warning system. JSAE Rev. 2003, 24, 65–70. [Google Scholar] [CrossRef]
- Formato, G.; Romano, R.; Formato, A.; Sorvari, J.; Koiranen, T.; Pellegrino, A.; Villecco, F. Fluid–Structure Interaction Modeling Applied to Peristaltic Pump Flow Simulations. Machines 2019, 7, 50. [Google Scholar] [CrossRef] [Green Version]
- Switkes, J.P.; Rossetter, E.J.; Coe, I.A.; Gerdes, J.C. Handwheel Force Feedback for Lanekeeping Assistance: Combined Dynamics and Stability. J. Dyn. Syst. Meas. Control 2006, 128, 532–542. [Google Scholar] [CrossRef] [Green Version]
- Enache, N.M.; Sebsadji, Y.; Marnmar, S.; Lusetti, B.; Glaser, S. Driver’s influence on the performance of an integrated lane departure avoidance and lane keeping assistance system. In Proceedings of the 18th IEEE International Conference on Control Applications Part of 2009 IEEE Multi-conference on Systems and Control, Saint Petersburg, Russia, 8–10 July 2009; pp. 119–124. [Google Scholar]
- Villecco, F.; Aquino, R.P.; Calabro, V.; Corrente, M.I.; d’Amore, M.; Grasso, A.; Naddeo, V. Fuzzy-assisted ultrafiltration of whey by-products recovery. Euro-Mediterr. J. Environ. Integr. 2020, 5. [Google Scholar] [CrossRef]
- Formato, A.; Guida, D.; Ianniello, D.; Villecco, F.; Lenza, T.L.; Pellegrino, A. Design of Delivery Valve for Hydraulic Pumps. Machines 2018, 6, 44. [Google Scholar] [CrossRef] [Green Version]
- Inallu, A.T. Design of Steering Wheel Force Feedback System with Focus on Lane Keeping Assistance Applied in Driving Simulator. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2014. [Google Scholar]
- Förster, M.; Hettel, R.; Schyr, C.; Pfeffer, P.E. Lateral dynamics on the vehicle test bed—A steering force module as a validation tool for autonomous driving functions. In Proceedings of the 9th International Munich Chassis Symposium 2018; Pfeffer, P., Ed.; Springer: Wiesbaden, Germany, 2019. [Google Scholar]
- Specka, F.; Hakuli, S.; Schick, B.; Contini, A.; Pfeffer, P.E. Evaluation and Optimization of Steering Behavior in Overall Vehicle Context at the “Steering-in-the-Loop” Test Bench. Available online: http://worldcat.org/isbn/9783180922119 (accessed on 4 July 2019).
- Formato, A.; Ianniello, D.; Romano, R.; Pellegrino, A.; Villecco, F. Design and Development of a New Press for Grape Marc. Machines 2019, 7, 51. [Google Scholar] [CrossRef] [Green Version]
- Salmaso, D.; Viola, G. Quale rapporto tra età, livello cognitivo e processi di elaborazione? In Normalità e Patologia Delle Funzioni Cognitive Nell’Invecchiamento; Salmaso, D., Caffarra, P., Eds.; Franco Angeli Editore: Milano, Italy, 1990; pp. 15–26. [Google Scholar]
- Bujarbaruah, M.; Ercan, Z.; Ivanovic, V.; Tseng, H.E.; Borrelli, F. Torque based lane change assistance with active front steering. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Samiee, S.; Nahvi, A.; Azadi, S.; Kazemi, R.; Hatamian Haghighi, A.R.; Ashouri, M.R. The effect of torque feedback exerted to driver’s hands on vehicle handling—A hardware-in-the-loop approach. Syst. Sci. Control Eng. 2015, 3, 129–141. [Google Scholar] [CrossRef] [Green Version]
- Shimakage, M.; Kawazoe, H.; Sadano, O.; Murakami, T. Design of Lane-Keeping Control with Steering Torque Input for a Lane-Keeping Support System. SAE Trans. J. Passeng. Car Mech. Syst. J. 2001, 110, 448–455. [Google Scholar]
- Naviglio, D.; Formato, A.; Scaglione, G.; Montesano, D.; Pellegrino, A.; Villecco, F.; Gallo, M. Study of the Grape Cryo-Maceration Process at Different Temperatures. Foods 2018, 7, 107. [Google Scholar] [CrossRef] [PubMed]
- Ercan, Z.; Carvalho, A.; Lefevre, S.; Tseng, H.E.; Gokasan, M.; Borrelli, F. Torque-based steering assistance for collision avoidance during lane changes. In Proceedings of the 13th International Symposium on Advanced Vehicle Control (AVEC ’16), Munich, Germany, 13–16 September 2016; pp. 43–48. [Google Scholar]
- Formato, A.; Ianniello, D.; Pellegrino, A.; Villecco, F. Vibration-Based Experimental Identification of the Elastic Moduli Using Plate Specimens of the Olive Tree. Machines 2019, 7, 46. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intervention Limitations | |
|---|---|
| lane width | Width car +1 m ÷ 4.5 m |
| curvature radius | >125 m |
| lateral acceleration | <2.5 m/s2 in curve and 3 m/s2 in straight |
| steering angle | <50 degrees |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salvati, L.; d’Amore, M.; Fiorentino, A.; Pellegrino, A.; Sena, P.; Villecco, F. Development and Testing of a Methodology for the Assessment of Acceptability of LKA Systems. Machines 2020, 8, 47. https://doi.org/10.3390/machines8030047
Salvati L, d’Amore M, Fiorentino A, Pellegrino A, Sena P, Villecco F. Development and Testing of a Methodology for the Assessment of Acceptability of LKA Systems. Machines. 2020; 8(3):47. https://doi.org/10.3390/machines8030047
Chicago/Turabian StyleSalvati, Luca, Matteo d’Amore, Anita Fiorentino, Arcangelo Pellegrino, Pasquale Sena, and Francesco Villecco. 2020. "Development and Testing of a Methodology for the Assessment of Acceptability of LKA Systems" Machines 8, no. 3: 47. https://doi.org/10.3390/machines8030047