Optimization of Gerotor Pumps with Asymmetric Profiles through an Evolutionary Strategy Algorithm


Abstract
:1. Introduction
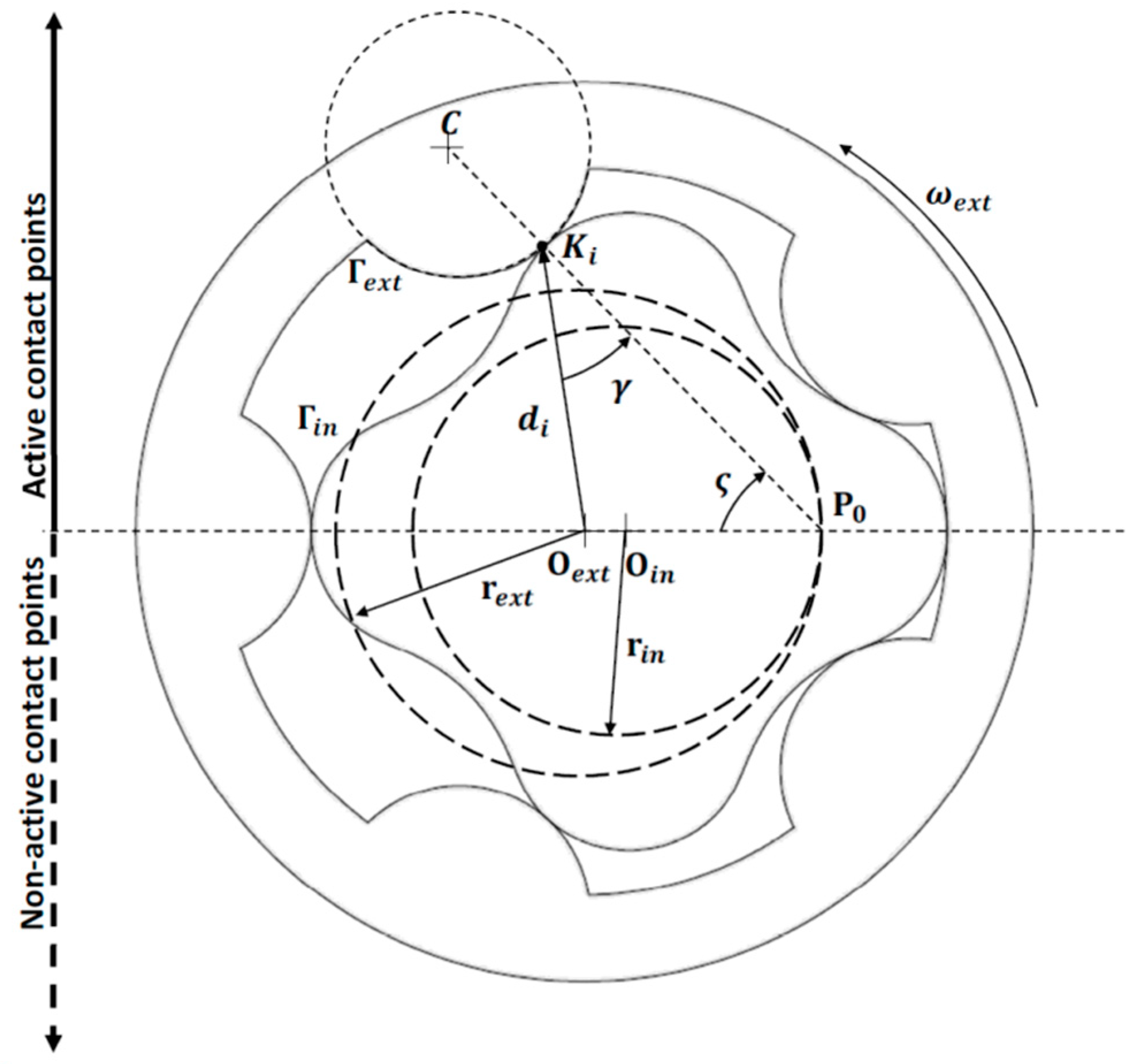
2. General Design Theory for Gerotor Pump Profiles
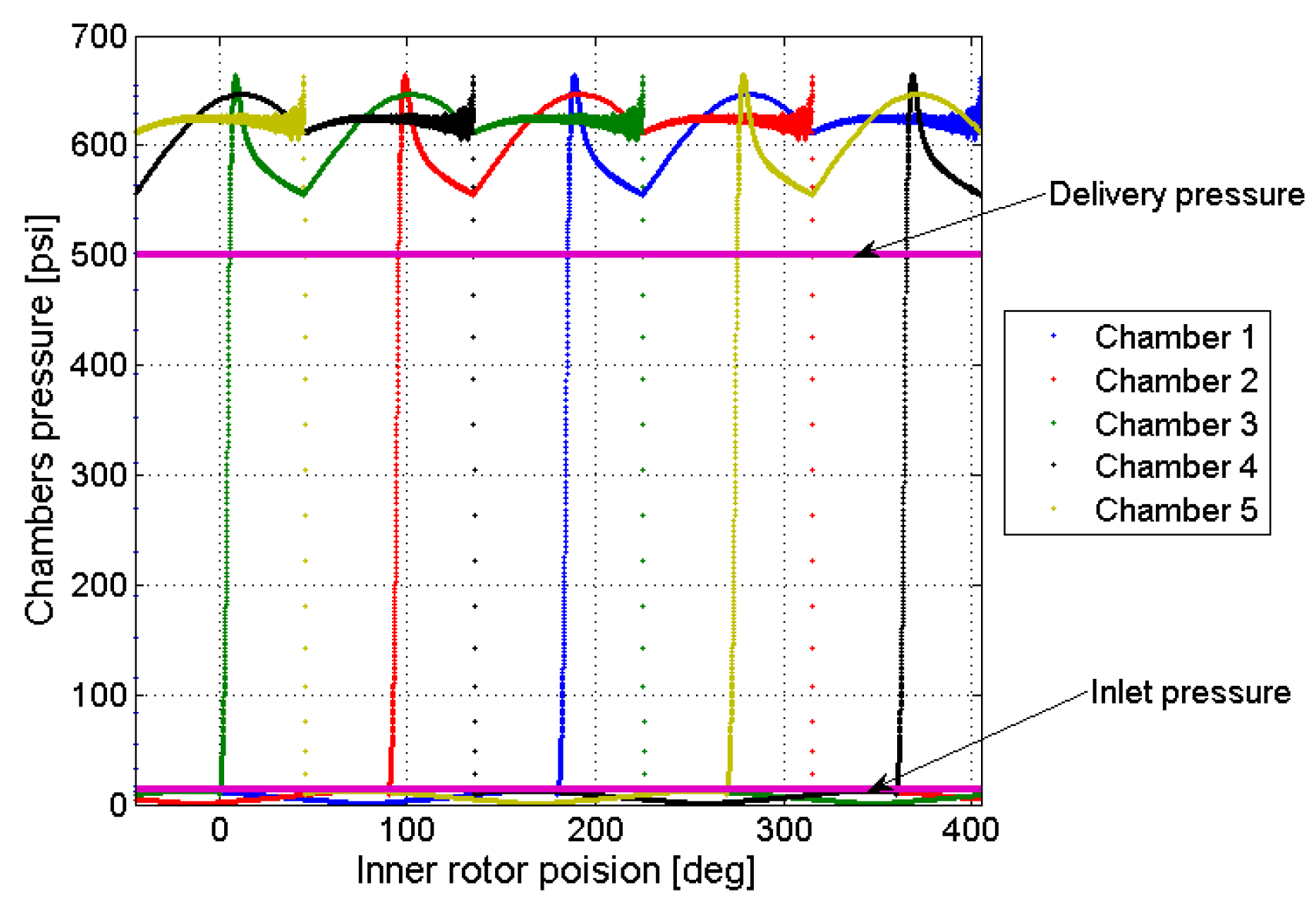
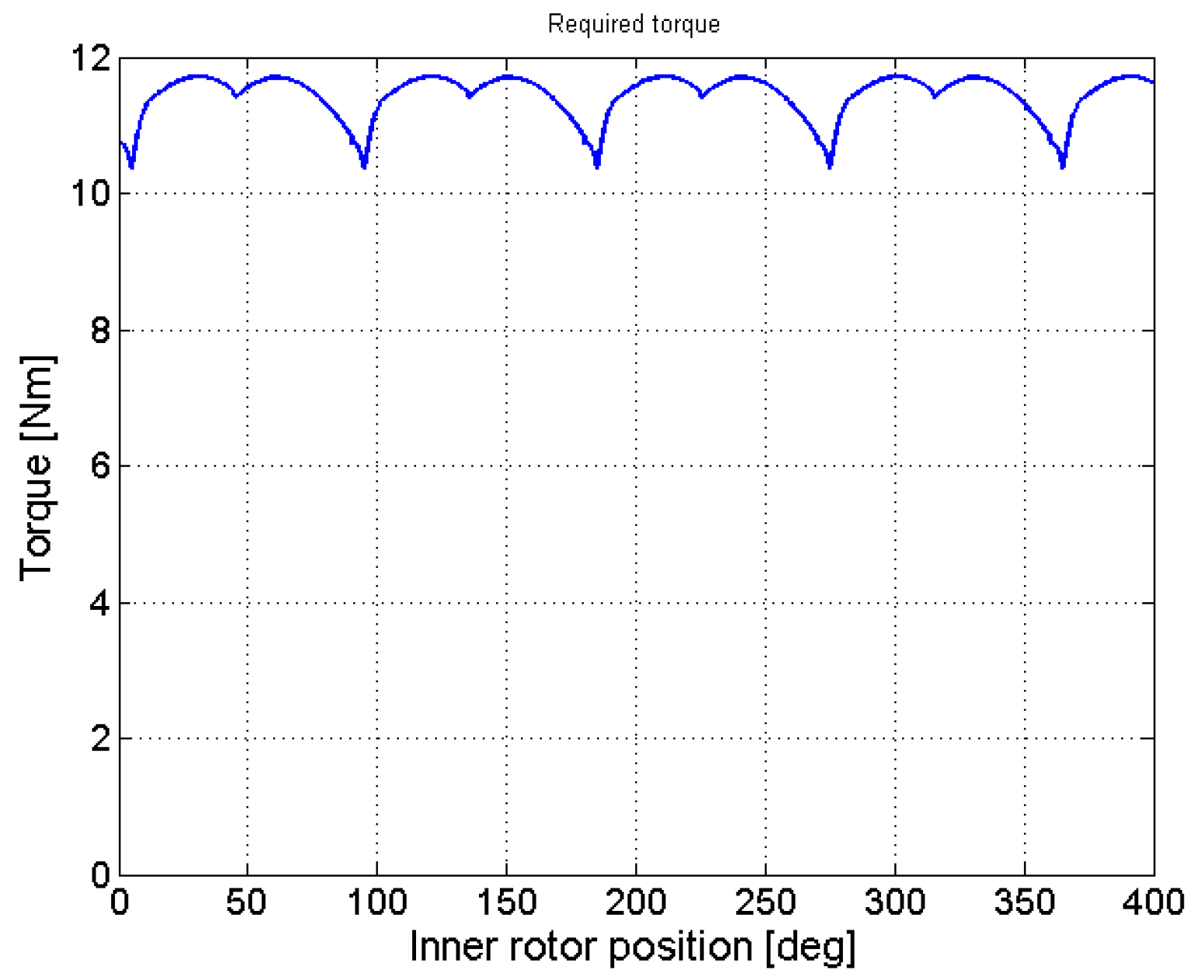
3. Gerotor Dynamic Model
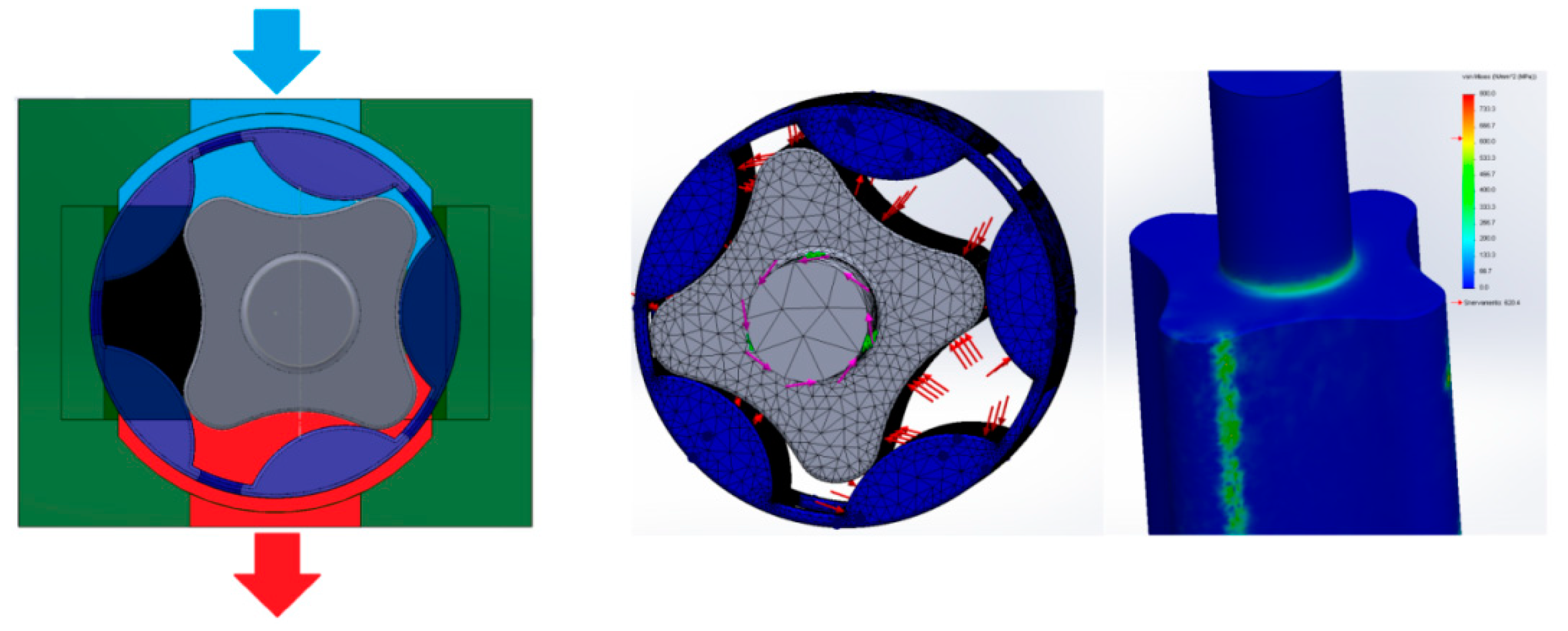
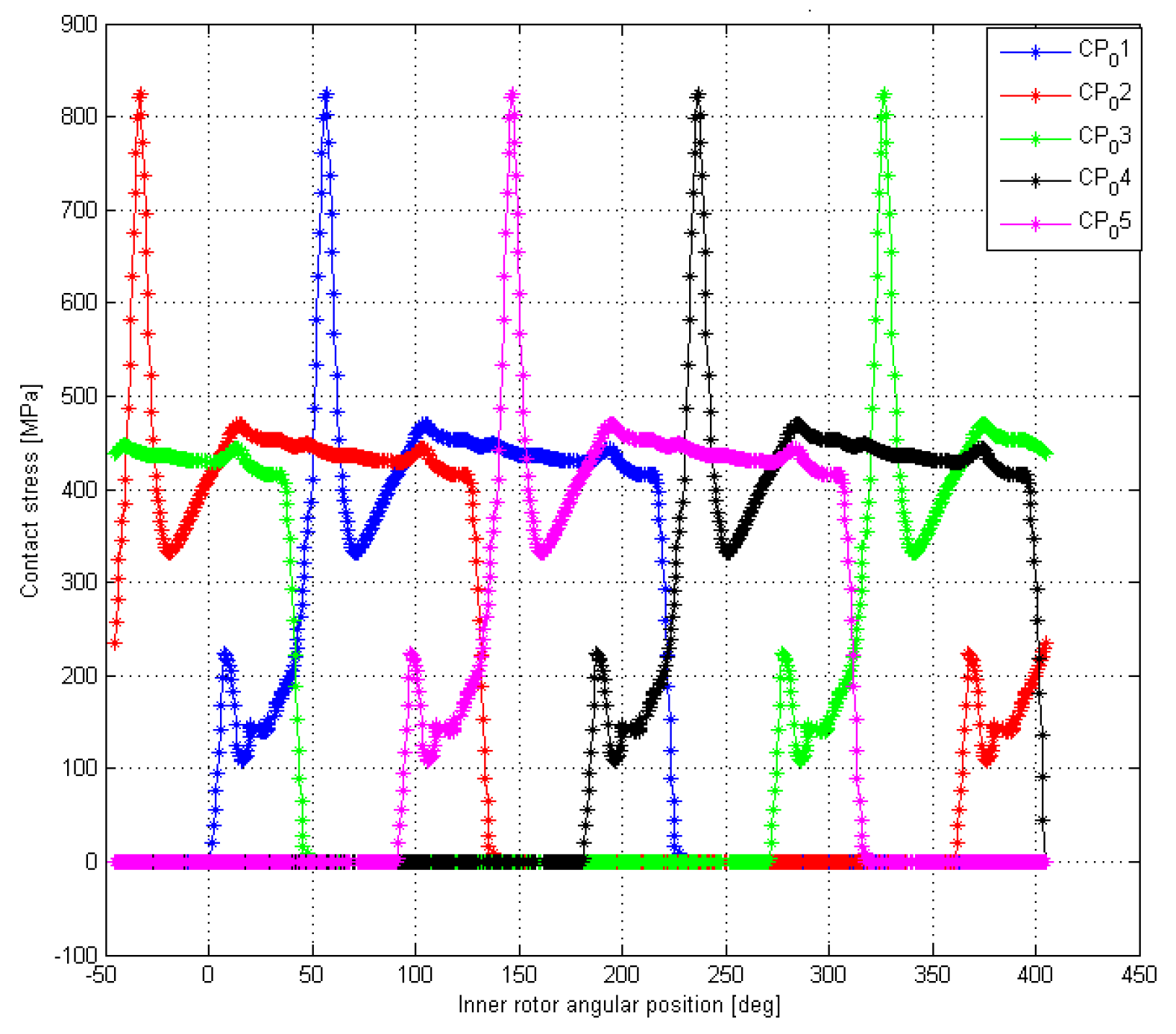
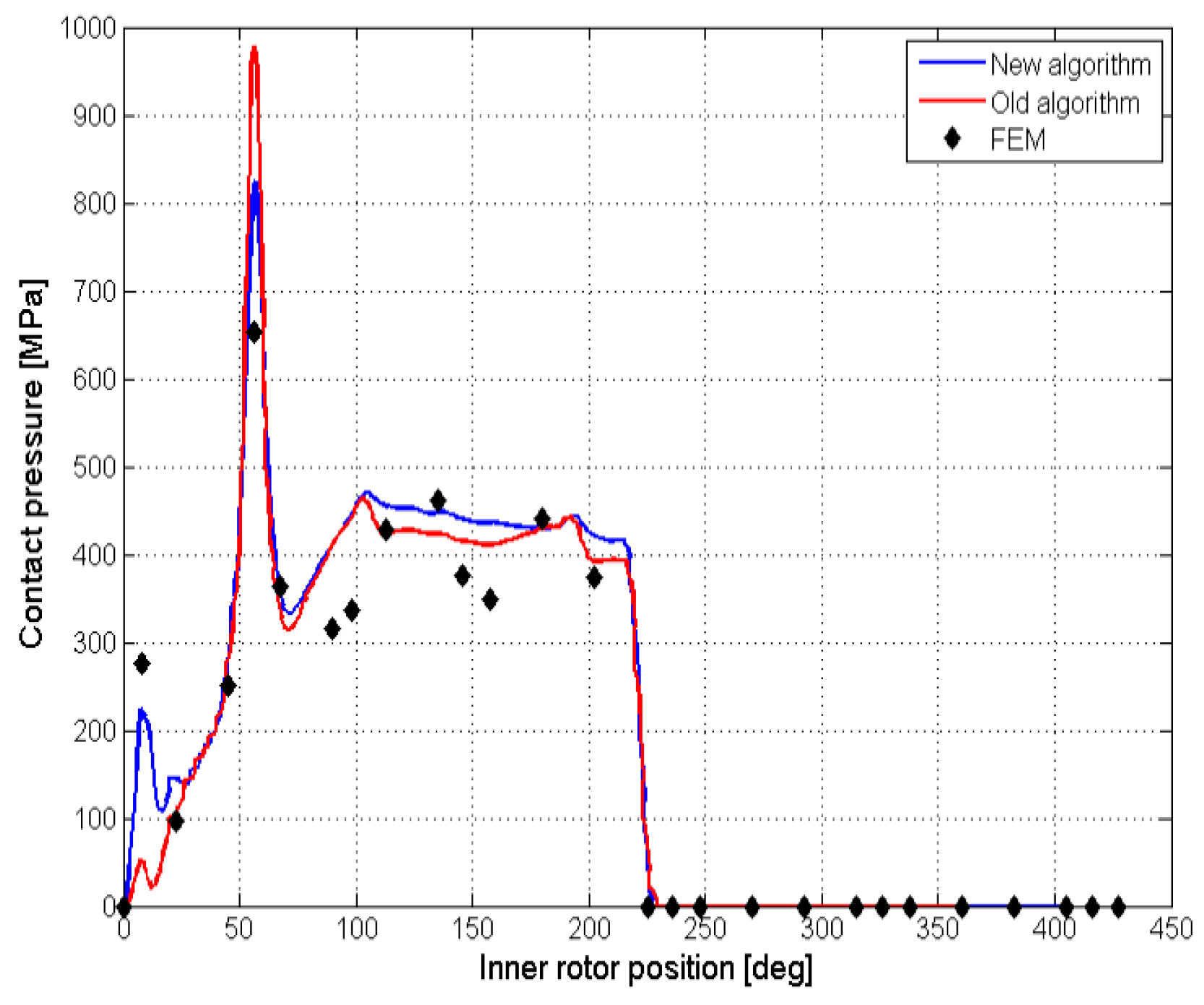
4. Contact Stress Estimation
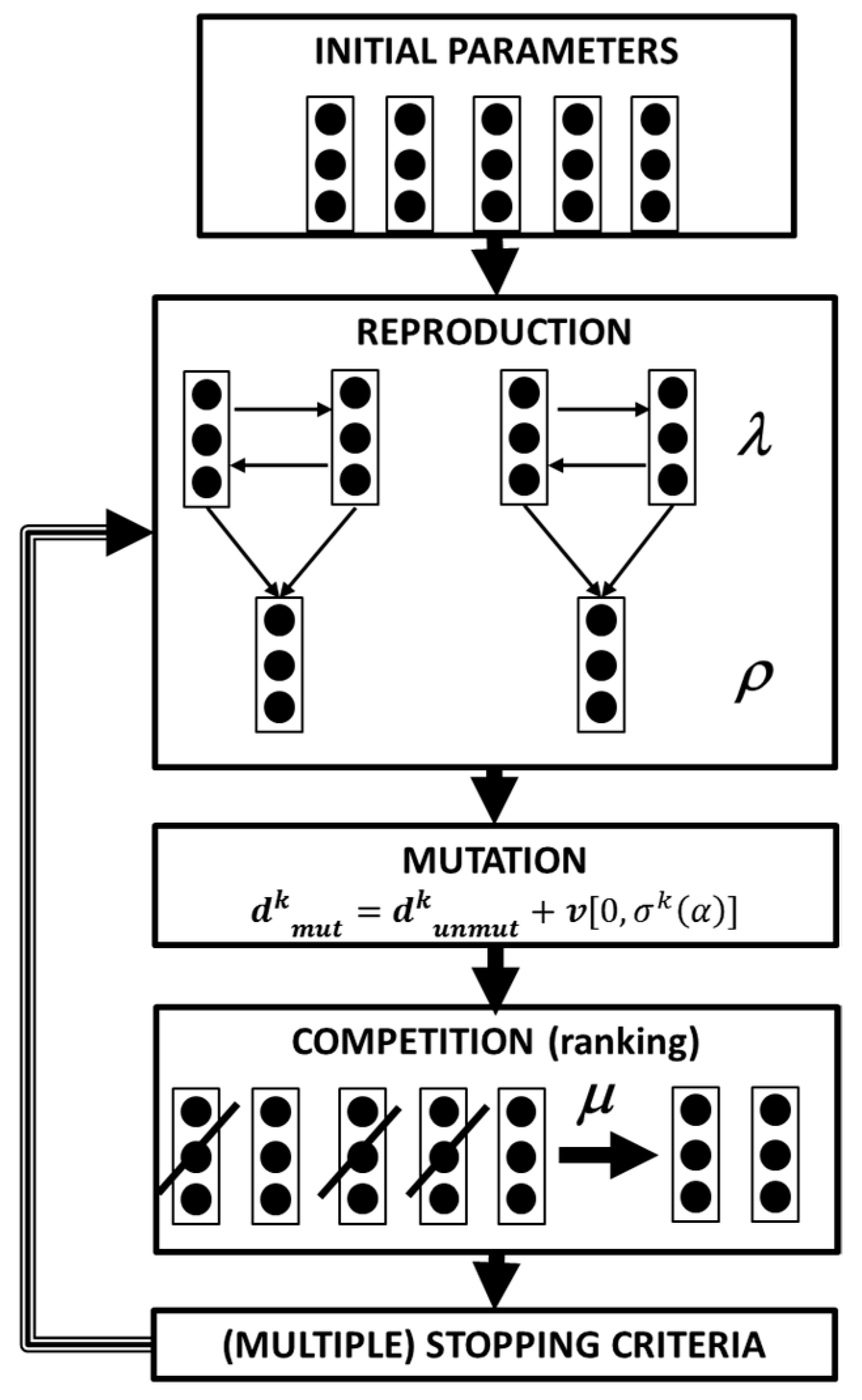
5. Stochastic Optimization Algorithms
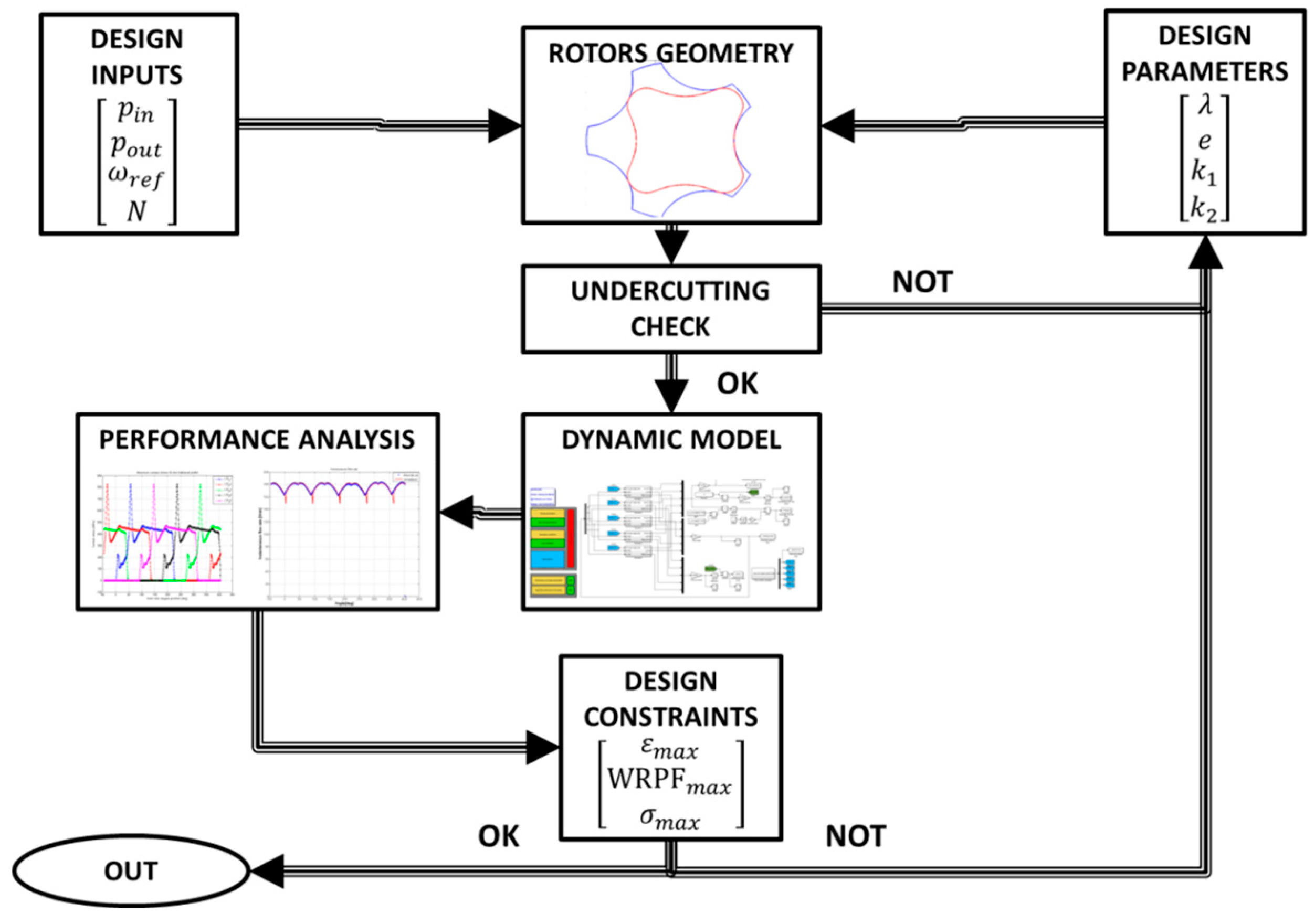
6. Profile Optimization
6.1. Cycloidal Gears Optimization
6.2. Second-Order Optimization through Asymmetric Lobes
7. Discussion and Further Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Crossover operator | |
| Fluid bulk modulus | |
| Angular pitch | |
| Flow rate irregularity | |
| Angular parameter for a parametric description of the lobe geometry | |
| Angle between the normal to the contact point and the radial direction | |
| External gear profile in its integral reference system | |
| External gear profile in the inner gear reference system | |
| Inner gear profile in its integral reference system | |
| Angular position of the external gear | |
| Angular position of the inner gear | |
| Non-dimensional design parameter | |
| Number of parents in the evolutionary algorithm | |
| Fluid dynamic viscosity | |
| Number of surviving elements at each iteration of the evolutionary algorithm | |
| Poisson ratio | |
| Profile parameterization | |
| Fluid density | |
| Curvature of the external profile | |
| Curvature of the internal profile | |
| Number of offspring in the evolutionary algorithm | |
| Local radius of the lobe | |
| Angular coordinates for lobe geometry description | |
| Contact stress | |
| Transmission ratio between the gears | |
| Angular speed of the external gear | |
| Angular speed of the inner gear | |
| Profile parameterization | |
| Frontal area of the chamber | |
| Port area | |
| Required port area | |
| Characteristic dimensions of the contact area | |
| Center of the lobe profile | |
| Discharge coefficient | |
| Distance between the gerotor axis and the contact points | |
| “Parent” parameter vector belonging to the k-th generation | |
| Parameter vector for the k+1 generation before mutation | |
| Young’s modulus | |
| Gerotor eccentricity | |
| Contact force | |
| Elliptic parameter | |
| Safety coefficient against cavitation | |
| Height of the leakage path | |
| Axial length of the chambers | |
| Length of the leakage path | |
| Transformation matrix | |
| Tooth number of the external gear | |
| Normal to the external gear profile | |
| Center of the external gear centrode | |
| Center of the inner gear centrode | |
| Mean pressure inside the i-th chamber | |
| Pressure at the inlet port | |
| Pressure at the port | |
| Vapor tension | |
| Pump total flow rate | |
| Net flow rate for the i-th chamber | |
| Flow rate between the i-1th and i − 1th chambers | |
| Average pump flow rate | |
| Flow rate from the port to the i-th variable volume chamber | |
| Fitness of the optimization problem solution | |
| Radius of the external gear centrode | |
| Radius of the internal gear centrode | |
| Limit value of the external gear radius | |
| Limit value of the inner gear radius | |
| Position of the generic point k in the lobe reference system | |
| Driving torque | |
| Volume of the i-th chamber | |
| Limit speed | |
| Sliding speed between mating profiles | |
| Co-penetration between gears profiles | |
| WRPF | Wear rate proportional factor |
| Reference frame integral with the external gear | |
| Fixed reference frame | |
| Reference frame integral with the inner gear |
References
- Mancò, G.; Mancò, S.; Rundo, M.; Nervegna, N. Computerized generation of novel gearings for internal combustion engines lubricating pumps. Int. J. Fluid Power 2000, 1, 49–58. [Google Scholar] [CrossRef]
- Meyr, N.; Cardé, C.; Nitta, C.; Garas, D.; Garrard, T.; Parks, J.; Vaughn, J.; Bangar, C.; Francisco, A.; Duvall, M.; et al. Design and Development of the 2002 UC Davis Future Truck; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2002. [Google Scholar]
- Ippoliti, L.; Hendrick, P. Influence of the supply circuit on oil pump performance in an aircraft engine lubrication system. In Proceedings of the ASME Turbo Expo 2013: Turbine Technical Conference and Exposition, San Antonio, TX, USA, 3–7 June 2013. [Google Scholar]
- Frosina, E.; Senatore, A.; Buono, D.; Manganelli, M.U.; Olivetti, M. A tridimensional CFD analysis of the oil pump of an high performance motorbike engine. Energy Procedia 2014, 45, 938–948. [Google Scholar] [CrossRef]
- Colbourne, J.R. The geometry of trochoid envelopes and their applications in rotary pumps. Mech. Mach. Theory 1974, 9, 421–435. [Google Scholar] [CrossRef]
- Beard, J.E.; Hall, A.S.; Soedel, W. Comparison of hypotrochoidal and epitrochoidal gerotors. J. Mech. Des. 1991, 113, 133–141. [Google Scholar] [CrossRef]
- Beard, J.E.; Yannitell, D.W.; Pennock, G.R. The effects of the generating pin size and placement on the curvature and displacement of epitrochoidal gerotors. Mech. Mach. Theory 1992, 27, 373–389. [Google Scholar] [CrossRef]
- Adams, G.; Beard, J.E. Comparison of helical and skewed axis gerotor pumps. Mech. Mach. Theory 1997, 32, 729–742. [Google Scholar] [CrossRef]
- Shung, J.B.; Pennock, G.R. Geometry for trochoidal-type machines with conjugate envelopes. Mech. Mach. Theory 1994, 29, 25–42. [Google Scholar] [CrossRef]
- Litivn, F.L. Theory of Gearing; NASA: Washington, DC, USA, 1989.
- Litvin, F.L.; Feng, P.-H. Computerized design and generation of cycloidal gearings. Mech. Mach. Theory 1996, 31, 891–911. [Google Scholar] [CrossRef]
- Vecchiato, D.; Demenego, A.; Argyris, J.; Litvin, F.L. Geometry of a cycloidal pump. Comput. Methods Appl. Mech. Eng. 2001, 190, 2309–2330. [Google Scholar] [CrossRef]
- Hwang, Y.-W.; Hsieh, C.-F. Determination of surface singularities of a cycloidal gear drive with inner meshing. Math. Comput. Model. 2007, 45, 340–354. [Google Scholar] [CrossRef]
- Mimmi, G.; Pennacchi, P. Non-undercutting conditions in internal gears. Mech. Mach. Theory 2000, 35, 477–490. [Google Scholar] [CrossRef]
- Ivanovic, L.; Jositovic, D. Specific sliding of trochoidal gearing profile in the gerotor pumps. FME Trans. 2006, 34, 121–127. [Google Scholar]
- Ivanovic, L.; Devedzic, G.; Cukovic, S.; Miric, N. Modeling of the meshing of trochoidal profiles with clearances. J. Mech. Des. 2012, 134, 041003. [Google Scholar] [CrossRef]
- Ivanovic, L.; Devedzic, G.; Miric, N.; Cukovic, S. Analysis of forces and moments in gerotor pumps. Proc. Inst. Mech. Eng. Part C JMES 2010, 224, 2257–2269. [Google Scholar] [CrossRef]
- Hsieh, C.F. Influence of gerotor performance in varied geometrical design parameters. J. Mech. Des. 2009, 131, 121008. [Google Scholar] [CrossRef]
- Hsieh, C.F. Fluid and dynamic analyses of a gerotor pump using various span angle designs. J. Mech. Des. 2012, 134, 121003. [Google Scholar] [CrossRef]
- Hsieh, C.F.; Hwang, Y.W. Geometric design for a gerotor pump with high area efficiency. J. Mech. Des. 2007, 129, 1269–1277. [Google Scholar] [CrossRef]
- Mimmi, G.; Pennacchi, P. Rotor design and optimization in internal lobe pumps. Appl. Mech. Rev. 1997, 50, 133–141. [Google Scholar] [CrossRef]
- Bonandrini, G.; Mimmi, G.; Rottenbacher, C. Theoretical analysis of an original rotary machine. J. Mech. Des. 2010, 132, 024501. [Google Scholar] [CrossRef]
- Bonandrini, G.; Mimmi, G.; Rottenbacher, C. Design and simulation of meshing of a particular internal rotary pump. Mech. Mach. Theory 2012, 49, 104–116. [Google Scholar] [CrossRef]
- Demenego, D.A.; Vecchiato, F.L.; Litvin, N.; Nervegna, S.; Mancò, S. Design and simulation of meshing of a cycloidal pump. Mech. Mach. Theory 2002, 37, 311–332. [Google Scholar] [CrossRef]
- Chiu-Fan, H. Flow characteristics of gerotor pumps with novel variable clearance design. ASME J. Fluids Eng. 2015, 137, 041107. [Google Scholar]
- Shih-His, T.; Yan, J.; Yang, D.C.H. Design of deviation-function based gerotors. Mech. Mach. Theory 2009, 44, 1595–1606. [Google Scholar]
- Yang, D.C.H.; Yan, J.; Shih-Hsih, T. Flowrate formulation of deviation function based gerotor pumps. J. Mech. Des. 2010, 132, 064503. [Google Scholar] [CrossRef]
- Yan, J.; Yang, D.C.; Shih-Hsih, T. On the generation of analytical noncircular multilobe internal pitch curves. J. Mech. Des. 2009, 130, 092601. [Google Scholar] [CrossRef]
- Litvin, F.L.; Demenego, A.; Vecchiato, D. Formation by branches of envelope to parametric families of surfaces and curves. Comput. Methods Appl. Mech. Eng. 2001, 190, 4587–4608. [Google Scholar] [CrossRef]
- Yan, J.; Shih-Hsih, T.; Yang, D.C.H. A new gerotor design method with switch angle assignability. In Proceedings of the 10th ASME International Power Transmission and Gearing Conference, Las Vegas, NV, USA, 4–7 September 2007. [Google Scholar]
- Choi, T.H.; Kim, M.S.; Lee, G.S.; Yung, S.Y.; Bae, J.H.; Kim, C. Design of rotor for internal gear pump using cycloid and circular-arc curves. J. Mech. Des. 2012, 134, 011005. [Google Scholar] [CrossRef]
- Bae, J.H.; Kwak, H.S.; San, S.; Kim, C. Design and CFD analysis of gerotor with multiple profiles (ellipse-involute-ellipse type and 3-ellipses type) using rotation and translation algorithm. Proc. Inst. Mech. Eng. Part C JMES 2015, 230, 804–823. [Google Scholar] [CrossRef]
- Jung, S.Y.; Bae, J.H.; Kim, M.S.; Kim, C. Development of new gerotor for oil pumps with multiple profiles. Int. J. Precis. Eng. Manuf. 2011, 12, 835–841. [Google Scholar] [CrossRef]
- Lizhen, H. Tooth profiles analysis for internal pump gear with straight line-conjugate curve profile. J. Mech. Transm. 2004, 6, 16–18. [Google Scholar]
- Xu, X.; Song, T.L. Optimization design of internal gear pump with straight line conjugate curve profile. J. Mech. Transm. 2007, 4, 69–71. [Google Scholar]
- Xu, X.Z.; Song, T.L. Analysis of flow characteristics of gear pump with straight line profile. Coal Mine Mach. 2008, 7, 47–49. [Google Scholar]
- Rundo, M. Models for Flow Rate Simulation in Gear Pumps: A review. Energy 2017, 10, 1261. [Google Scholar] [CrossRef]
- Gamez-Montero, P.J.; Castilla, R.; Codina, E.; Freire, J.; Morató, J.; Sanchez-Casas, E.; Flotats, I. GeroMAG: In-House Prototype of an Innovative Sealed, Compact and Non-Shaft-Driven Gerotor Pump with Magnetically-Driving Outer Rotor. Energy 2017, 10, 435. [Google Scholar] [CrossRef]
- Mancò, S.; Nervegna, N.; Rundo, M. Critical issues on performance of lubricating gerotor pumps at high rotational speed. In Proceedings of the 7th Scandinavian International Conference on Fluid Power, Linköping, Sweden, 30 May–1 June 2001; pp. 23–38. [Google Scholar]
- Jacazio, G.; De Martin, A. Influence of rotor profile geometry on the performance of an original low-pressure gerotor pump. Mech. Mach. Theory 2016, 100, 296–312. [Google Scholar] [CrossRef]
- Franc, J.-P. Physics and Control of Cavitation, Chapter in Design and Analysis of High Speed Pumps; NATO RTO Educational Notes; NATO: Washington, DC, USA, 2006. [Google Scholar]
- Singh, T. Design of Vane Pump Suction Porting to Reduce Cavitation at High Operation Speeds; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1991. [Google Scholar]
- Idel’Chik, I.E. Handbook of Hydraulic Resistance, 3rd ed.; Jaico: Mumbai, India, 2008. [Google Scholar]
- Viersma, T.J. Analysis, Synthesis and Design of Hydraulic Servosystems and Pipelines; Elsevier: Amsterdam, The Netherlands, 1980. [Google Scholar]
- Jelali, M.; Kroll, A. Hydraulic Servo-Systems; Springer: Berlin, Germany, 2003. [Google Scholar]
- Gamez-Montero, P.J.; Castilla, R.; Khamashta, M.; Codina, E. Contact problems of a trochoidal-gear pump. Int. J. Mech. Sci. 2006, 48, 1471–1480. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Alotto, P.G.; Eranda, C.; Brandtatter, B.; Furnrtratt, G.; Magele, C.; Molinari, G.; Nervi, M.; Preis, K.; Repetto, M.; Richter, K. Stochastic Algorithms in Electromagnetic Optimization. IEEE Trans. Magn. 1998, 34, 3674–3684. [Google Scholar] [CrossRef]
- Rechenberg, I. Evolutionsstrategie 94; Frommann-Holzboog: Stuttgart, Germany, 1994. [Google Scholar]
- Holland, J.H. Adaption in Natural and Artificial Systems; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1955, 21, 1087–1092. [Google Scholar] [CrossRef]
- Kelner, V.; Léonard, O. Application of genetic algorithms to lubrication pump stacking design. J. Comput. Appl. Math. 2004, 168, 255–265. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.H.; Kim, C.; Chang, Y.J. Optimum design on lobe shapes of gerotor oil pump. J. Mech. Sci. Technol. 2006, 20, 1390–1398. [Google Scholar] [CrossRef]
- Kwon, S.; Kim, C.; Shin, J. Optimal rotor wear design in hypotrochoidal gear pump using genetic algorithm. J. Cent. South Univ. Technol. 2011, 18, 718–725. [Google Scholar] [CrossRef]
- Fogel, D.B. Evolutionary Computation; IEEE Press: New York, NY, USA, 1995. [Google Scholar]
- Schwefel, H.P. Numerische Optimierung von Computer-Modellen Mittels der Evolutionsstrategie; Birkhaeuser: Basel, Switzerland, 1977. [Google Scholar]
- Janikow, C.J.; Michalewicz, Z. An experimental comparison of binary and floating point representation in genetic algorithms. In Proceedings of the 4th International Conference Genetic Algorithms, Los Altos, CA, USA, 13–16 July 1991; pp. 31–36. [Google Scholar]
- Back, T.; Schwefel, H.P. An Overview of Evolutionary Algorithms for Parameter Optimization, Evolutionary Computation; MIT Press: Cambridge, MA, USA, 1993. [Google Scholar]
- Konak, A.; Coit, D.W.; Smith, A.E. Multi-objective optimization using genetic algorithms: A tutorial. Reliab. Eng. Syst. Saf. 2006, 91, 992–1007. [Google Scholar] [CrossRef]
- Schaffer, J.D. Multiple objective optimization with vector evaluated genetic algorithms. In Proceedings of the International Conference on Genetic Algorithm and Their Applications, Pittsburh, PA, USA, 24–26 July 1985. [Google Scholar]
- Fonseca, C.M.; Fleming, P.J. Multiobjective genetic algorithms. In IEE Colloquium on Genetic Algorithms for Control Systems Engineering; IET: London, UK, 1993. [Google Scholar]
- Ivanovic, L.; Stojanovic, B.; Blagojevic, J.; Bogdanovic, G.; Marinkovic, A. Analysis of the flow rate and the volumetric efficiency of the trochoidal pump by application of Taguchi method. Tehnički Vjesnik 2017, 24, 265–270. [Google Scholar]
- Robinson, A.; Vacca, A. Multi-objective optimization of circular-toothed gerotors for kinematics and wear by genetic algorithm. Mech. Mach. Theory 2018, 128, 150–168. [Google Scholar] [CrossRef]
- Horn, J.; Nafpliotis, N.; Goldberg, D.E. A niched Pareto genetic algorithm for multiobjective optimization. In Proceedings of the First IEEE Conference on Evolutionary Computation. IEEE World Congress on Computational Intelligence, Orlando, FL, USA, 27–29 June 1994. [Google Scholar]
- Hajela, P.; Lin, C.-Y. Genetic search strategies in multicriterion optimal design. Struct. Optim. 1992, 4, 99–107. [Google Scholar] [CrossRef]
- Murata, T.; Ishibuchi, H. MOGA, multi-objective genetic algorithms. In Proceedings of the 1995 IEEE International Conference on Evolutionary Computation, Perth, WA, Australia, 29 November–1 December 1995. [Google Scholar]
- Srinivas, N.; Deb, K. Multiobjective optimization using nondominated sorting in genetic algorithms. J. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L. Multiobjective evolutionary algorithms: A comparative case study and the strength Pareto approach. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef]
- Corne, D.W.; Knowles, J.D.; Oates, M.J. The Pareto envelope-based selection algorithm for multiobjective optimization. In Proceedings of the Sixth International Conference on Parallel Problem Solving from Nature, Paris, France, 18–20 September 2000. [Google Scholar]
- Lu, H.; Yen, G.G. Rank-density-based multiobjective genetic algorithm and benchmark test function study. IEEE Trans. Evol. Comput. 2003, 7, 325–343. [Google Scholar]
- Yen, G.G.; Lu, H. Dynamic multiobjective evolutionary algorithm: Adaptive cell-based rank and density estimation. IEEE Trans. Evol. Comput. 2003, 7, 253–274. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A fast elitist nondominated sorting genetic algorithm for multi-objective optimization: NSGA-II. In Proceedings of the Sixth International Conference on Parallel Problem Solving from Nature, Paris, France, 18–20 September 2000. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley: Reading, MA, USA, 1989. [Google Scholar]
- Karamooz Ravari, M.R.; Forouzan, M.R.; Moosavi, H. Flow irregularity and wear optimization in epitrochoidal gerotor pumps. Meccanica 2012, 47, 9178–9928. [Google Scholar]
- Kwon, S.-M.; Kim, M.S.; Shin, J.-H. Analytical wear model of a gerotor pump without hydrodynamic effect. J. Adv. Mech. Des. Syst. Manuf. 2008, 2, 230–237. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speed (rpm) | Objective of the First Optimization Process | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (-) | (mm) | (-) | (-) | (mm) | (-) | (-) | (-) | (mm) | (-) | (mm) | (-) | |
| 5000 | 2.118 | 3.074 | 0.720 | 1.159 | 1.820 | 5.326 | 0.747 | 1.070 | 2.063 | 3.643 | 0.939 | 1.115 |
| 6000 | 2.046 | 2.880 | 0.753 | 1.179 | 1.932 | 4.582 | 0.834 | 1.142 | 2.041 | 3.279 | 0.879 | 1.114 |
| 7000 | 2.000 | 2.388 | 0.775 | 1.037 | 1.821 | 3.807 | 0.780 | 1.091 | 2.047 | 2.671 | 0.851 | 1.099 |
| 8000 | 2.162 | 1.829 | 0.743 | 1.179 | 1.862 | 3.537 | 0.765 | 1.028 | 2.126 | 2.558 | 0.805 | 1.041 |
| 9000 | 2.244 | 1.636 | 0.878 | 1.109 | 1.813 | 3.074 | 0.761 | 1.080 | 2.126 | 2.025 | 0.815 | 1.175 |
| 10,000 | 2.159 | 1.486 | 0.757 | 1.016 | 2.110 | 2.525 | 0.913 | 1.103 | 2.168 | 2.014 | 0.859 | 1.122 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Martin, A.; Jacazio, G.; Sorli, M. Optimization of Gerotor Pumps with Asymmetric Profiles through an Evolutionary Strategy Algorithm. Machines 2019, 7, 17. https://doi.org/10.3390/machines7010017
De Martin A, Jacazio G, Sorli M. Optimization of Gerotor Pumps with Asymmetric Profiles through an Evolutionary Strategy Algorithm. Machines. 2019; 7(1):17. https://doi.org/10.3390/machines7010017
Chicago/Turabian StyleDe Martin, Andrea, Giovanni Jacazio, and Massimo Sorli. 2019. "Optimization of Gerotor Pumps with Asymmetric Profiles through an Evolutionary Strategy Algorithm" Machines 7, no. 1: 17. https://doi.org/10.3390/machines7010017