1. Introduction
As of late, interior permanent-magnet synchronous motors (IPMSM) have been largely utilized in high-performance variable speed in numerous industrial applications because of their high efficiency, high power factor, high power density, wide speed range, high ratio of torque-to-inertia, quicker response, low vibration, low noise, and basic construction. The IPMSMs are utilized in electric vehicles (EVs), aerospace applications, power plants, marine applications, robotic applications, lift control, and modern servo drives. Especially, IPMSMs have been generally utilized in electric vehicle drive control due to the above-mentioned features [
1,
2].
The techniques used for the control of IPMSMs in electric vehicles can be counted as direct torque control (DTC) [
3], maximum torque per ampere control (MTPA) [
4], field-oriented control (FOC) [
5], and model predictive control (MPC) [
6]. One of the most distinguishing features of field-based control techniques is that they require an exact rotor position [
7]. Mechanical position sensors have disadvantages such as high cost, lack of longevity, low reliability, and being mechanically cumbersome. Therefore, sensorless control of IPMSMs can remove mechanical sensors and prevent their deficiencies by assessing rotor position and speed data from electrical measurements with certain digital algorithms [
8].
Recently, many model-based observer strategies have been studied for IPMSMs, such as the model reference adaptive system (MRAS) [
9], the sliding mode observer (SMO) [
10,
11], the extended Kalman filter (EKF) [
12], etc. The MRAS-based observer, which is used to estimate the position and speed of the motor, has a low computational burden and a simple algorithm [
13]. The MRAS consists of an adaptation mechanism that produces the estimated speed with the error obtained by comparing adjustable and reference models. The design of the adaptation mechanism should ensure that the estimation speed converges to the actual speed. The PI regulator is employed as the adaptive mechanism for estimating the actual speed in the conventional MRAS. In [
9], the MRAS has been utilized for sensorless IPMSM control. Further, the MRAS strategy shows lower oscillation than the SMO in a steady-state condition, and both techniques show similar speed responses in a transient state.
The PI-based MRAS methods, which are based on active power, reactive power, or fictitious quantity, were presented in the literature by the authors of [
14,
15,
16]. These methods operate independently from machine parameters like inductance, resistance, or flux, depending on the strategy. However, the classical PI regulator was applied as an adaptation mechanism in these studies. Furthermore, the proposed methods need to be restructured to overcome instabilities in the regenerative mode. The PI regulator can be supplanted by different strategies, such as sliding mode and fuzzy logic, to ensure fast convergence and robustness in the system. The authors of [
17] have presented a two-dimensional fuzzy controller that is used to supplant the conventional PI for high-speed region operations of the PMSM. However, the originality of the two-dimensional fuzzy logic controller against the PI regulator needs to be revealed for different speed ranges. The ANFIS architecture has been proposed as an adaptive mechanism of the MRAS for sensorless control of the PMSM in low-speed operations by the authors of [
18]. This method, which exhibits superior performance and robustness compared to the SMO method, needs to be evaluated with MRAS methods, employing various adaptation mechanisms. The sliding mode strategies have been presented instead of the PI regulator in the literature. In [
19,
20], the SM-based MRAS has been applied to the induction motor driver as a speed estimator. The sliding mode structure used as an adaptation mechanism improves robustness. However, the traditional sliding mode suffers from the problem of chattering. Therefore, phase lag can occur in the sliding mode strategy, which requires a low-pass filter. Another study [
21] has applied the SM-based MRAS, which utilizes the sigmoid function as a speed estimator for the IPMSM. Furthermore, the sigmoid function is employed instead of the signum function to reduce the chattering effect. In [
22], the super-twisting algorithm (STA)-based MRAS has been studied as a speed estimator for the induction motor driver to test its robustness against load disturbances. The STA, which utilizes the signum function, has been developed to mitigate jitter in the sliding mode structure. In [
23], an STA-based MRAS observer was proposed, where the inverse hyperbolic sine function was replaced with the signum function in the integral term of the super-twisting algorithm. In [
24], the adaptation mechanism of the MRAS observer, which consists of fuzzy logic, sliding mode, and the STA, has been compared for speed estimation accuracy and the robustness of the wind energy conversion system. It has been reported that the single-input fuzzy controller and STA have shown superiority as adaptation mechanisms for the MRAS. Also, the terminal sliding mode (TSM) strategy, which also has a fast form, has been previously reported in various forms that used different equations [
25]. Although these strategies are generally used as speed controllers [
26], there are studies where they are used as observers; for instance, the fast terminal sliding mode (FTSM) is designed as a torque estimator [
27].
In this paper, the adaptive STA technique and the FTSM are compared, and these strategies have been employed instead of the traditional PI controller in the adaptation mechanism. In addition, the FTSM strategy, which has been utilized as a speed controller in the literature, is presented and tested as a speed observer for the IPMSM. Also, one of the aims of the paper is to examine the adaptive STA strategy, which utilized the sigmoid function for suppressing the chattering effect of the sliding mode in different operating conditions, such as the steady-state performance and dynamic performance of the IPMSM in the MTPA control. On this basis, the modified MRAS speed estimator strategy is evaluated for the EV, which utilizes the IPMSM in the MTPA control under the ECE-15 drive cycle, which is combined with the EUDC drive cycle. The main contributions of this paper are as follows: A modified adaptive STA-based MRAS strategy instead of the conventional PI-MRAS for speed estimation of the IPMSM is proposed. The sigmoid function is replaced with the signum function to suppress the chattering effect in the STA. The coefficient of the STA is tuned according to the rotor speed, while the coefficient is selected at a large enough constant value to achieve good stability in a wide speed range. The effectiveness of the proposed speed observer has been verified by simulation results for the IPMSM, which is utilized in the EV, which is operated by the MTPA control.
The paper is structured as follows: The mathematical equations of the IPMSM, as well as the MTPA control strategy, are described in
Section 2. The structure of the conventional and modified MRAS are introduced in
Section 3.
Section 4 presents the results of the simulation as a comparison of the conventional and sliding mode MRASs. Additionally, the modified MRAS, which utilizes an adaptive STA using the sigmoid function for EV application, is examined. Finally, conclusions are drawn in
Section 5.
2. Mathematical Model of the IPMSM and MTPA Control Algorithm
The stator voltage equations of the IPMSM, which are shown in
Figure 1, are defined in the rotating reference frame (
dq−axis) as follows:
where
and
are the
dq−axis components of stator voltage;
and
are the
dq−axis components of stator current;
and
is the
dq−axis inductances;
is the stator resistance;
is the rotor electrical speed;
is the permanent-magnet flux linkage. The electromagnetic torque and the mechanical equations of the IPMSM are expressed by
where
P is the number of pole pairs;
and
are the electromagnetic torque and motor load torque;
J and
B are the inertia of the rotor and the viscous friction coefficient;
is the rotor’s mechanical speed.
The electromagnetic torque of the IPMSM consists of excitation torque and reluctance torque due to its rotor having a saliency
. Thus, the IPMSM is suitable for a wide-speed operation range with the MTPA and FW control methods, which are applied in the constant torque region and the constant power region, respectively [
28].
The curve of the MTPA can be calculated to ensure minimum current consumption per maximum torque in the constant torque region, which represents operation below the rated speed. Then, the
dq−axis currents can be formulated considering the stator current
constraint in the MTPA control [
29].
The flux-weakening control is applied in the constant power area, which represents operation above the rated speed. The limiting ellipse of the stator voltage decreases as the rotor speed increases, on the condition that the center of the ellipse continues as before. The equations of the stator current limiting circle and the stator voltage limiting ellipse that will restrict the MTPA trajectory are defined as
where
and
are the maximum value of the stator voltage and the stator current, respectively. Hence, the voltage constraints can be derived as
Considering the above equations, the
dq−axis currents of the flux-weakening control region for the possible maximum torque corresponding can be derived as
The equation of the PI speed controller in the MTPA can be stated as
where
and
are the proportional and integral coefficients, respectively.
The cross-coupling effect is the mutual inductance between the
d-axis and
q-axis of the IPMSM. The cross-coupling inductance may distort the motor voltage and current and cause ripples in torque. IPMSMs have the dominant cross-coupling effects due to having a relatively large inductance. Therefore, the
dq−axis currents cannot be controlled independently by
and
such as
and
in
and
expressions. The current regulator should be designed with feedforward compensation to cancel the cross-coupling effect, which increases as speed increases [
29]. The current controller equations with the PI controller are presented as
where
and
.
are
the
d and
q stator flux linkage components, respectively.
3. Structure of MRAS Observer
The MRAS method, which consists of a reference model, an adjustable model, and an adaptation mechanism, is designed to estimate the
dq−axis stator currents and the rotor speed. The reference model is utilized to express the actual states, while the adjustable model is utilized to provide the estimated values. The error between the adjustable and reference models is delivered to the adaptation mechanism. The adaptation mechanism that generates the estimated speed adjusts the adaptive model according to the estimated rotor speed [
13]. The structure of the MRAS method is depicted in
Figure 2.
The
dq−axis stator currents are calculated using the reference model of the IPMSM. The reference model is obtained as
According to the reference model, the state space equations of the adjustable model of the IPMSM with estimated values are defined as
where
is the estimated rotor electrical speed;
and
are the estimated
d-axis and
q-axis current, respectively. The error matrix of the
dq−axis stator currents and the error of the rotor speed are given as
The difference between the reference and the adjustable models, which represent the state error, is expressed as follows:
where:
Popov’s inequality criterion is shown as in [
30].
where
is any finite positive constant. Also,
and
are defined as follows, respectively.
Hence, it is possible to find an error between the reference and the adjustable models.
Thus, the speed estimation algorithm can be obtained by
Finally, the value of the estimated rotor angular position is acquired by combining the estimated rotor electrical speed. Furthermore, the estimated mechanical speed can be calculated using Equation (5).
6. Simulation Results
The simulation model is performed to validate the performance of the modified MRAS strategy by using the IPMSM for EVs in the Matlab/Simulink platform according to
Figure 4. The parameters of the IPMSM are itemized in
Table 1 [
35]. The switching frequency of the inverter is 10 kHz.
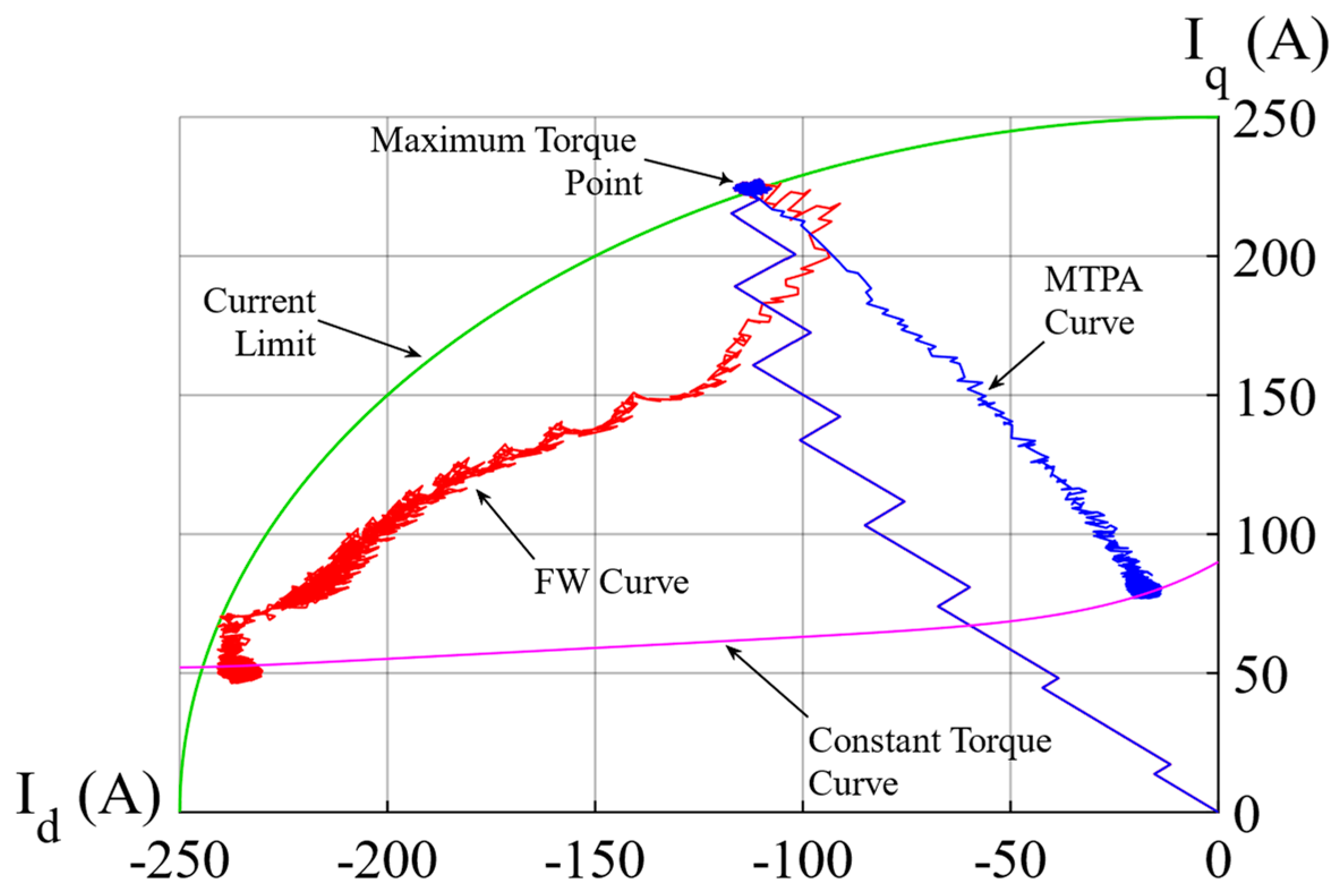
Figure 5 demonstrates the MTPA curve of the
dq−axis current trajectories of the step response of the IPMSM in an MTPA control when the motor speed is increased from a standstill to 3500 rpm under a 50 Nm load for this sample case. The motor is operated along the MTPA curve until it reaches the base speed. The
dq−axis currents of the motor reach the MTPA point, which intersects with the constant torque curve of the motor at a 50 Nm load in the steady-state point. Thus, the MTPA curve provides the minimum current to achieve the desired torque. Therefore, the motor’s efficiency is increased because the copper losses are minimized. Afterward, the motor speed is increased to 8000 rpm. The operation type of the motor goes from MTPA to FW at the maximum torque point. Similarly, the
dq−axis currents of the motor reach the FW point, which intersects with the constant torque curve of the motor at a 50 Nm load at the steady-state point. As a result, a wide speed range can be obtained through the FW control for the IPMSM.
To verify the performance of the proposed adaptive STA-MRAS strategy, it is compared to the TSM-based MRAS, which uses a sliding mode strategy, and the conventional PI-MRAS. The above three strategies are performed at the same parameters of speed and the current controller in an MTPA. The parameters of the adaptive STA-MRAS are designed as , , , and 0.02; the TSM-MRAS parameters are , , and ; PI parameters are and .
In order to analyze the steady-state and dynamic condition performance of the MRAS methods, the reference speed command is given as follows: it is increased from 0 to 500 rpm for the low-speed condition, then changed from 500 to 3000 rpm for the MTPA control region, and finally raised from 3000 to 6000 rpm for the FW control region. In all cases, the motor was operated at a load torque of 50 Nm.
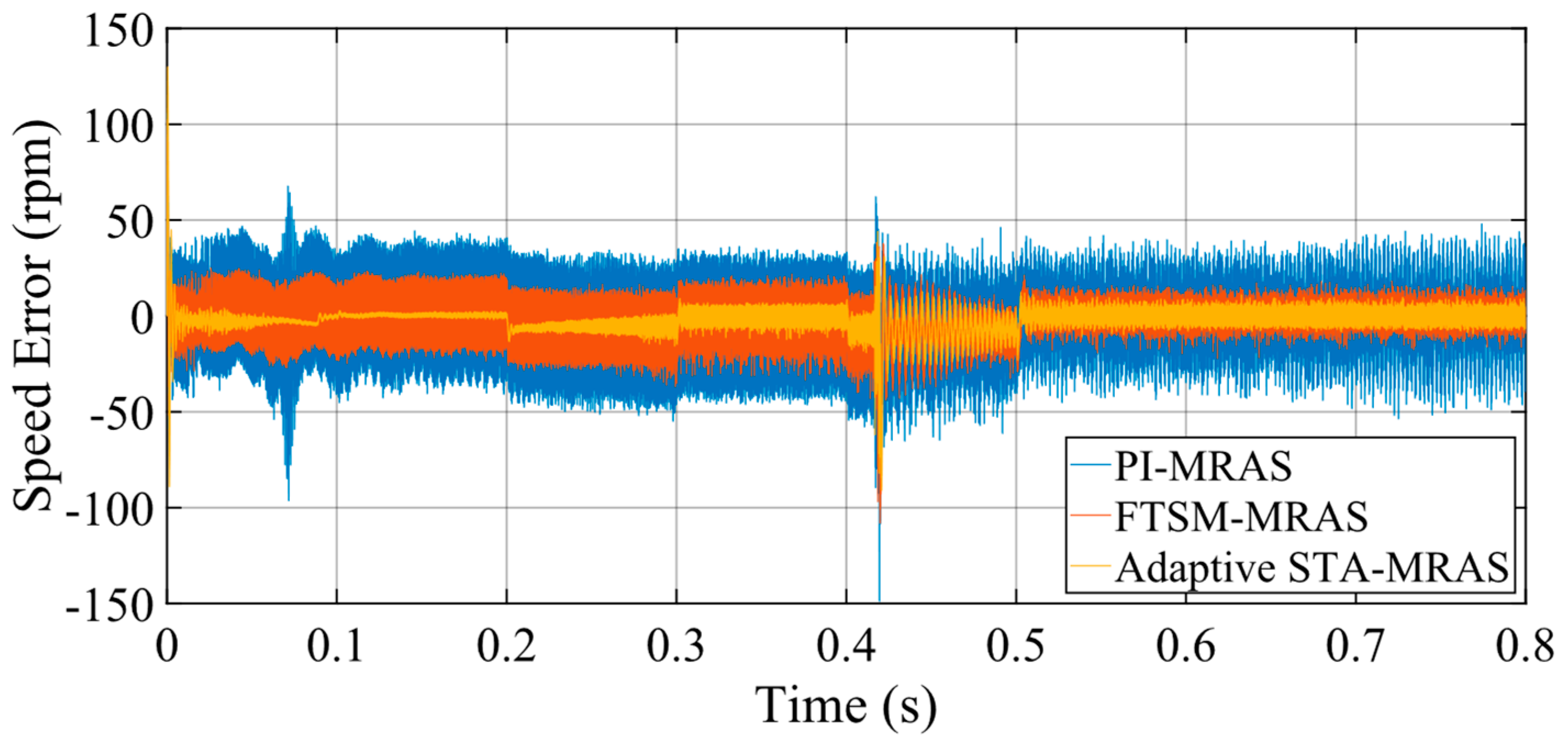
Figure 6 illustrates the response and fluctuations of the rotor speed in the conventional PI-MRAS, FTSM-MRAS, and proposed adaptive STA-MRAS.
The speed errors, which are between the actual and estimated speed for the conventional PI-MRAS, FTSM-MRAS, and proposed adaptive STA-MRAS, are depicted in
Figure 7. The range of speed fluctuation is ±2 rpm, ±20 rpm, and ±36 rpm at 500 rpm under the adaptive STA-MRAS, FTSM-MRAS, and PI-MRAS, respectively. The errors of the three methods are around ±6 rpm, ±20 rpm, and ±36 rpm at 3000 rpm, respectively. Finally, the adaptive STA-MRAS considerably reduces the speed error compared with the other MRAS strategies by ±7 rpm at 6000 rpm. The speed error is ±10 rpm in the FTSM-MRAS at 6000 rpm. Additionally, the maximum speed error is ±33 at 6000 rpm when the PI-MRAS is implemented.
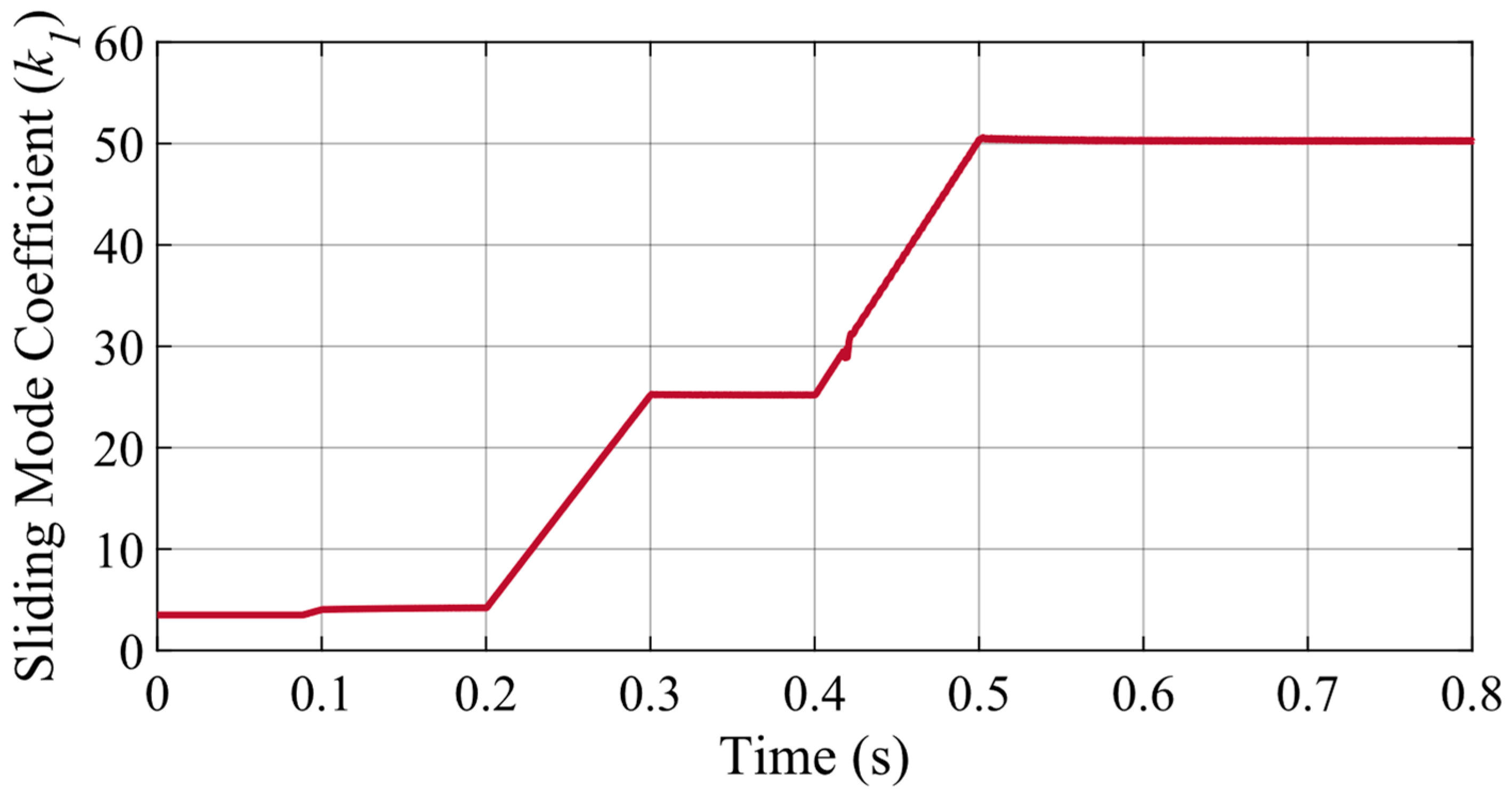
The proposed adaptive STA-MRAS causes less position estimation error than the STA-MRAS with a constant sliding mode coefficient [
36]. To suppress the chattering effect in both the low-speed range and the high-speed range, the
coefficient is adjusted according to the rotor speed. The sliding mode coefficient
has a constant value of approximately 7% of the rated speed. In other words,
has a positive initial value
. That is because the coefficient
is initialized with a fixed value to prevent the rotor speed from becoming unstable due to the system, which may be unstable at the starting condition. It is obvious that the adaptive STA-MRAS works well, as shown in
Figure 6 and
Figure 7. Additionally,
Figure 8 demonstrates the sliding mode coefficient
, which varies with the rotor speed of the proposed adaptive STA-MRAS according to the conditions as presented in
Figure 6. Additionally, it can be seen that the estimated speed oscillates along at a time of transition from the MTPA to FW control region due to its control algorithm for all observers, between 0.415 s and 0.425 s, as depicted in
Figure 6c.
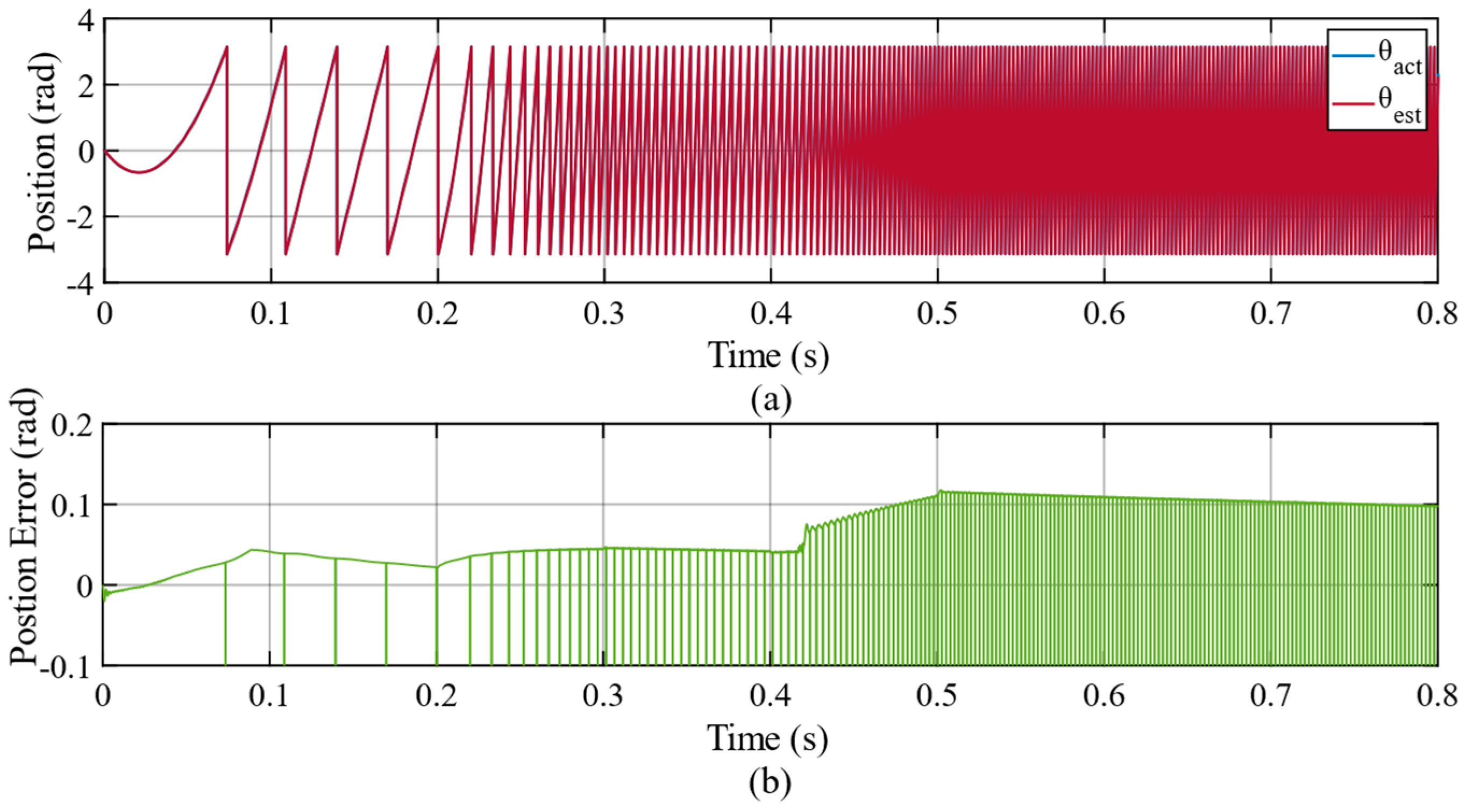
The position estimation error of the proposed adaptive STA-MRAS is depicted in
Figure 9. The position error increases as the motor speed increases, especially in the FW region for all observer strategies. The maximum position error oscillates around 0.1 rad at 6000 rpm for the adaptive STA-MRAS from 0.5 s to 0.8 s.
Figure 10 displays the position estimation error of the FTSM-MRAS, which is within around 0.15 rad at 6000 rpm from 0.5 s to 0.8 s. Furthermore, the position error is about 0.05 rad at 6000 rpm from 0.5 s to 0.8 s for PI-MRAS, as illustrated in
Figure 11. The adaptive STA-MRAS has a smaller chattering effect than the FTSM-MRAS for the rotor position estimation in sliding mode methods. In addition, the PI has a smaller deviation in the estimation of the rotor position than the others. However, the adaptive STA-MRAS, which estimates the rotor position as smoother and more stable when tracking the actual position, increases the performance of the IPMSM, such as by reducing current harmonics, torque ripple, etc.
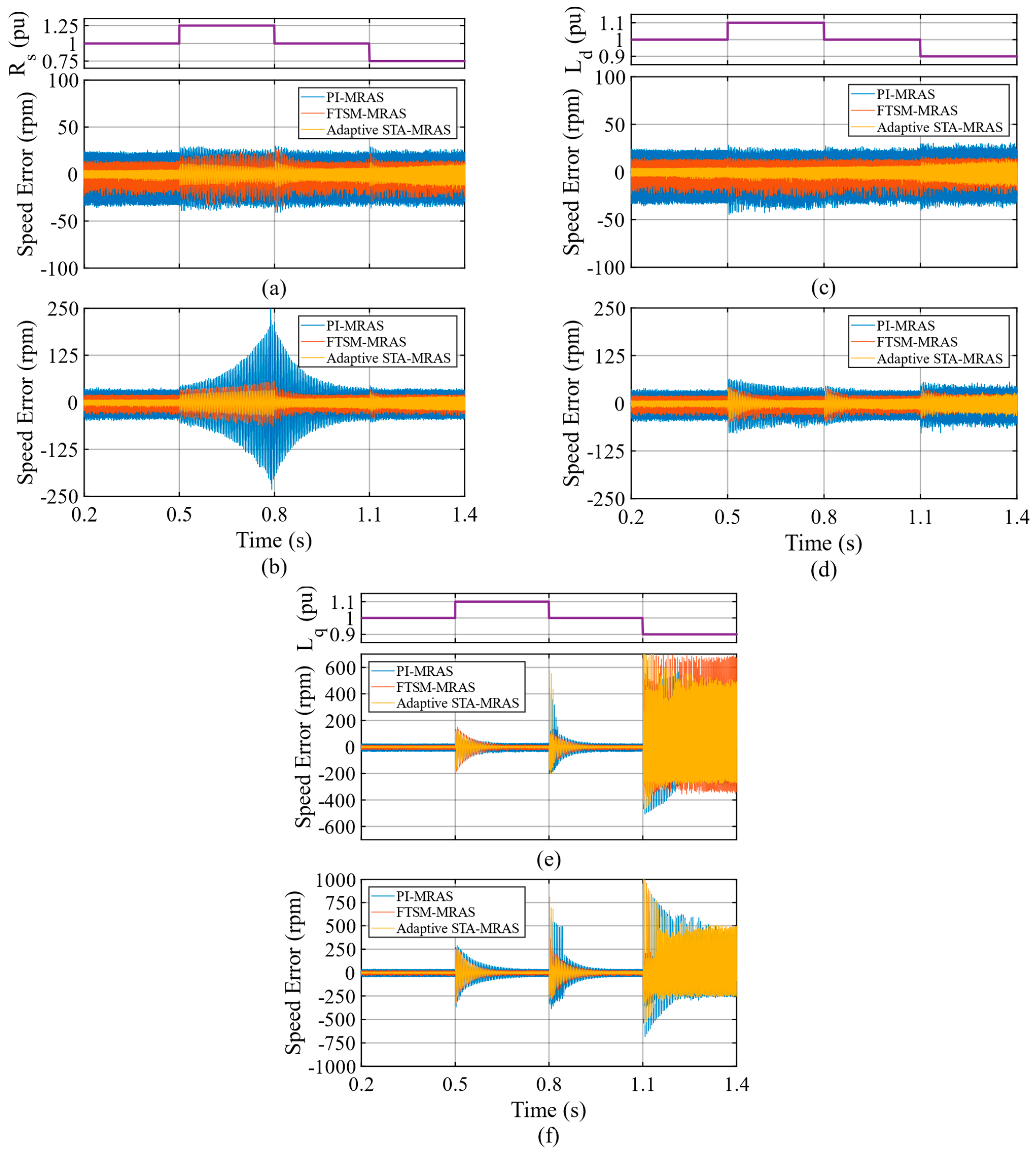
The mismatch between motor and observer parameters causes a rotor position estimation error.
Figure 12 depicts the performance of the MRAS observers under model mismatches at 3000 rpm under both 25 Nm and 50 Nm load torque. The stator resistance
varies between 0.75 and 1.25 pu. Furthermore, the
dq−axis inductances vary within 10% of the original values. The MRAS observers can retain strong robustness during the variation of the
without online estimation of the stator resistance. In particular, the adaptive STA-MRAS converges faster to the steady state while the speed error is in a more acceptable range than the other methods during the stator resistance parameter changes. However, the accuracy of the q-axis inductance
is required for the MRAS observers in this study. The estimation performance varies with respect to the variation of
. The MRAS observers can partially maintain their performance when the
and
parameter values are increased. However, the estimated rotor speed becomes unacceptable when
is decreased, unlike
. When the load torque is increased, as seen in
Figure 12b,d,f, the convergence time of the incorrectly estimated rotor speed to the actual rotor speed becomes longer due to the step change in the parameters. Furthermore, the speed fluctuations increase with parameter changes under increasing load torque. Generally, compared to PI-MRAS and FTSM-MRAS, the adaptive STA-MRAS performs with better robustness towards inductance and resistance variation. Therefore, online parameter estimation is necessary to enhance speed accuracy and system stability.
The simulation results demonstrate that the proposed STA-MRAS strategy exhibits reducing speed ripples for an IPMSM controlled in a wide-speed range. The following simulation analyzes the performance of the adaptive STA-MRAS when the motor speed is adjusted by considering the electric vehicle velocity and its transmission system in the drive cycles, which have dynamic load and speed conditions. Therefore, the ECE-15 and EUDC drive cycles (Extra Urban Driving Cycle) have been employed for examining the performance of the proposed adaptive STA-MRAS in electric vehicle (EV) applications. A simplification is made by neglecting the headwind blows and accepting the slope angle as 0°.
Table 2 illustrates the vehicle parameters utilized in the simulation [
34].
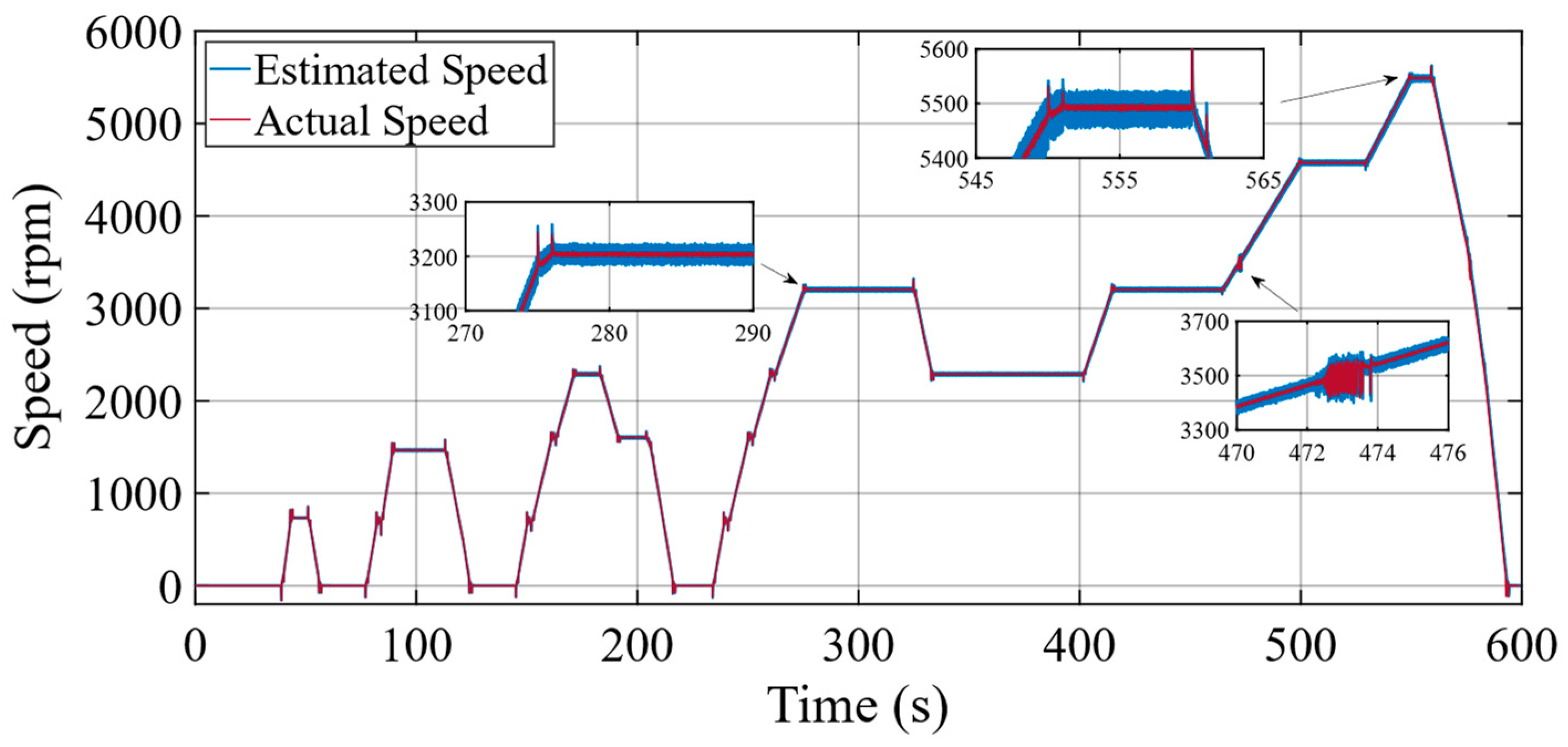
In this paper, the IPMSM operates under MTPA control up to the nominal speed of the motor, which corresponds to 77 km/h of vehicle velocity. Above the nominal speed, FW control is employed. Furthermore, the maximum speed of the EUDC is 120 km/h, which is equal to almost 5500 rpm for the IPMSM.
Figure 13,
Figure 14 and
Figure 15 demonstrate the rotor speed, developed electromagnetic torque, and
dq−axis current obtained by the adaptive STA-MRAS, respectively. Furthermore, the rotor speed fluctuated during the transition from the MTPA to the FW control region operation and vice versa because the reference speed oscillated around the base speed, from time 472 s to 474 s, as illustrated in
Figure 13. Moreover, the
dq−axis current, which oscillates, causes torque ripples in transient states, as shown in
Figure 14 and
Figure 15. The absolute value of the
d-axis component increases quickly when entering the FW region. For this reason, the torque fluctuation will be bigger for the IPMSM above the base speed. Also, the estimation errors of the adaptive STA-MRAS for different conditions in the drive cycle are summarized in
Table 3.
Table 3 reports torque performances such as max, min, mean values, and mean absolute percentage error (MAPE) alongside speed and current performance for the modified STA-based MRAS. The MTPA control region is more stable than the FW region for the IPMSM in terms of ripple of speed, torque, and current. Nevertheless, the modified STA-MRAS gives almost the same performance in terms of the mean absolute percentage error of the torque for both operating conditions.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}