
An Adaptive Torque Observer Based on Fuzzy Inference for Flexible Joint Application




Abstract
:1. Introduction
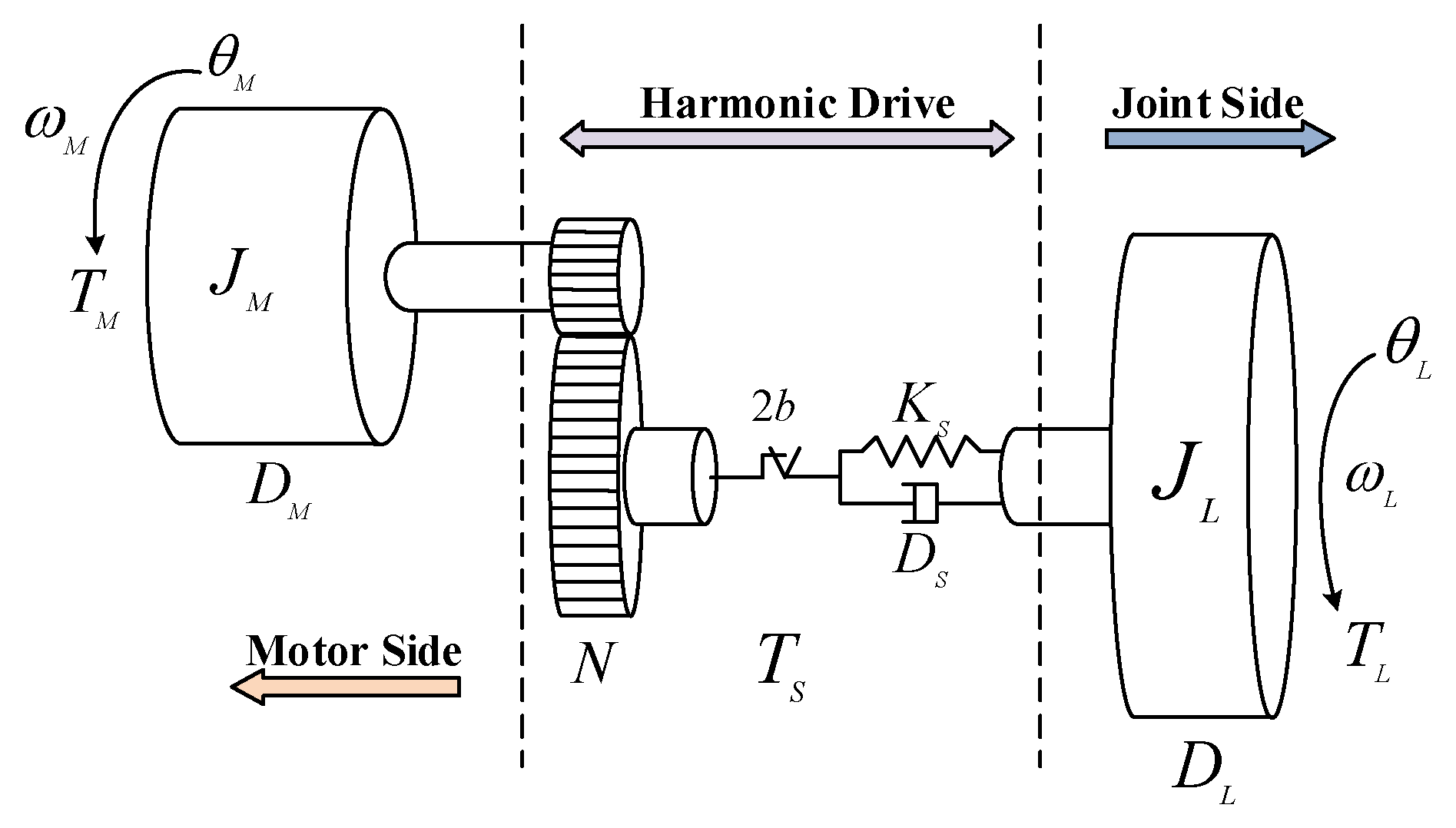
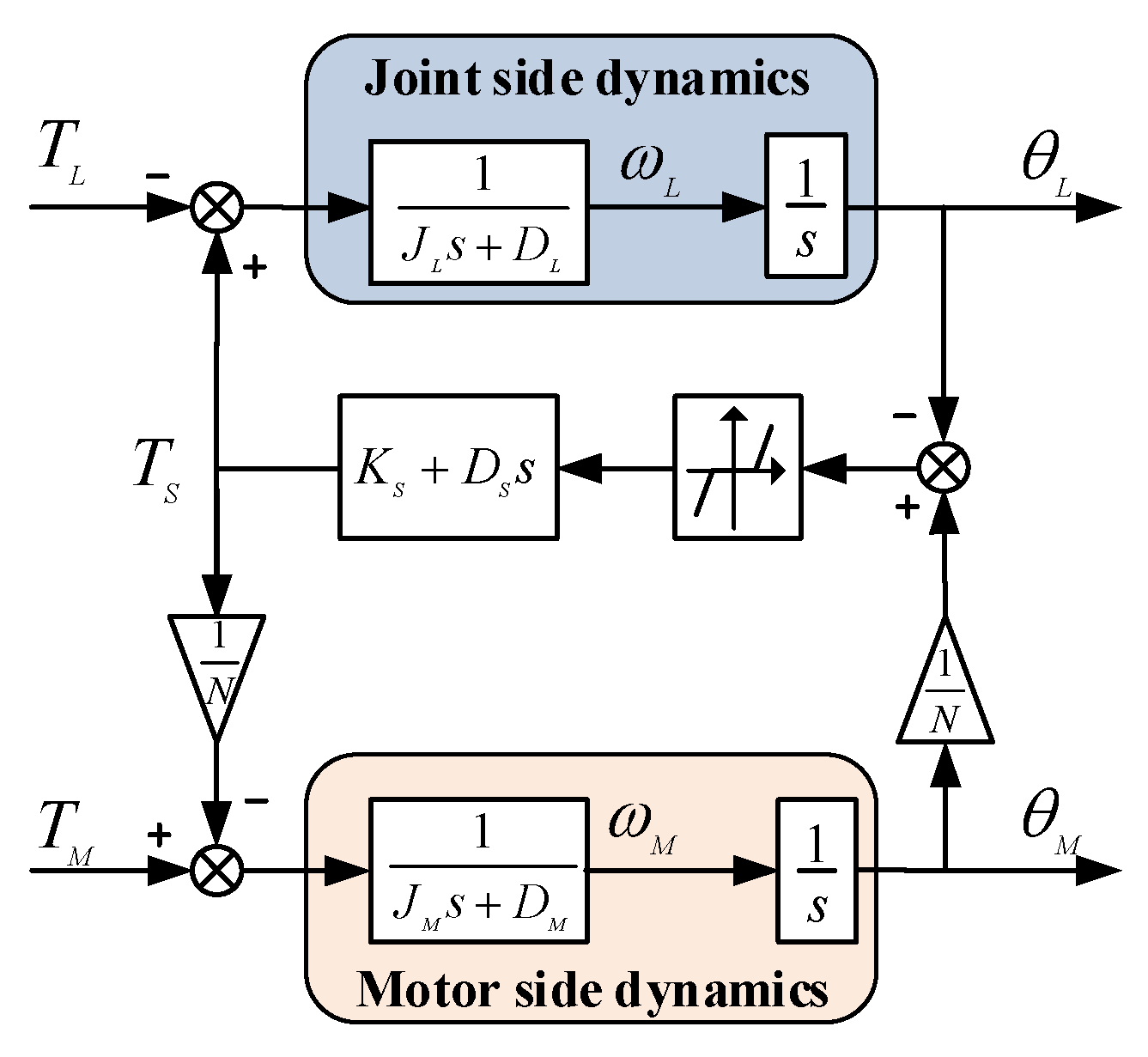
2. System Modeling of Flexible Joint
3. Classical Luenberger Torque Observer
3.1. Observer Design
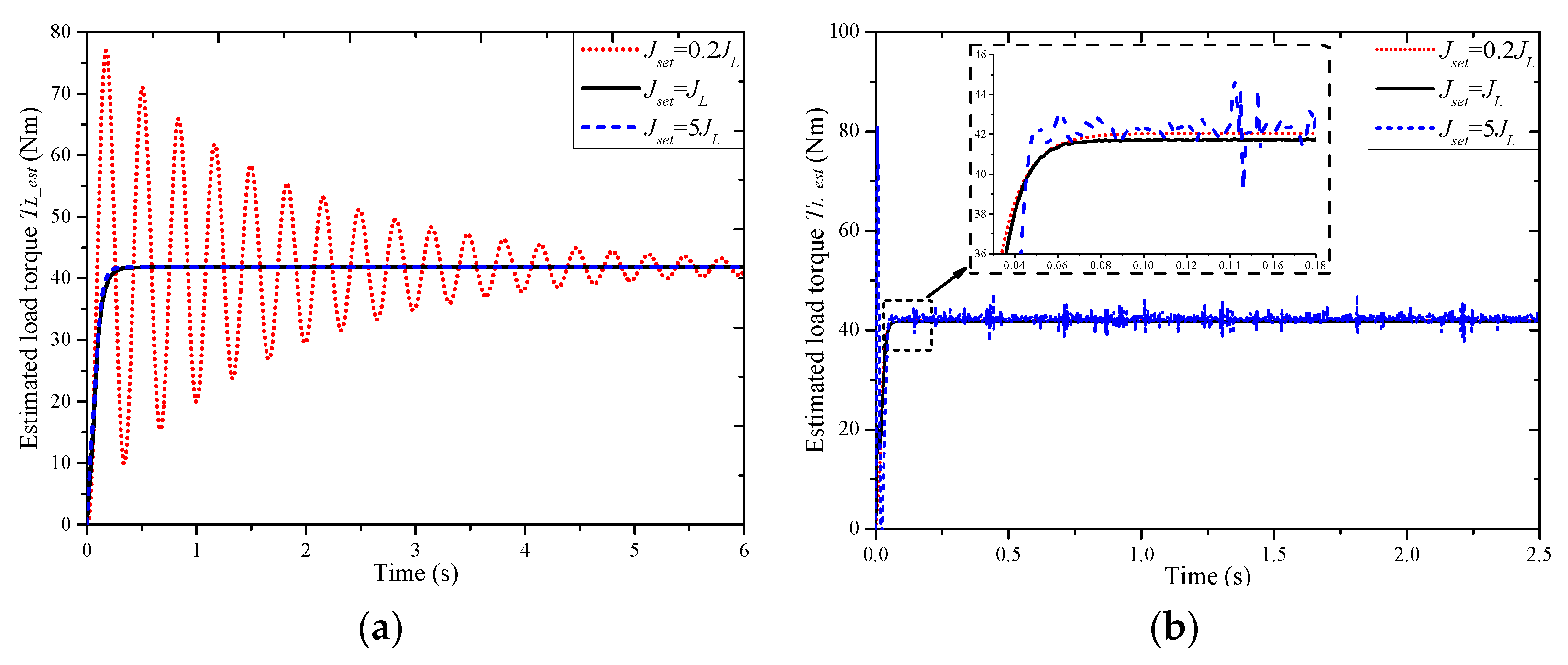
3.2. Observer Performance Analysis
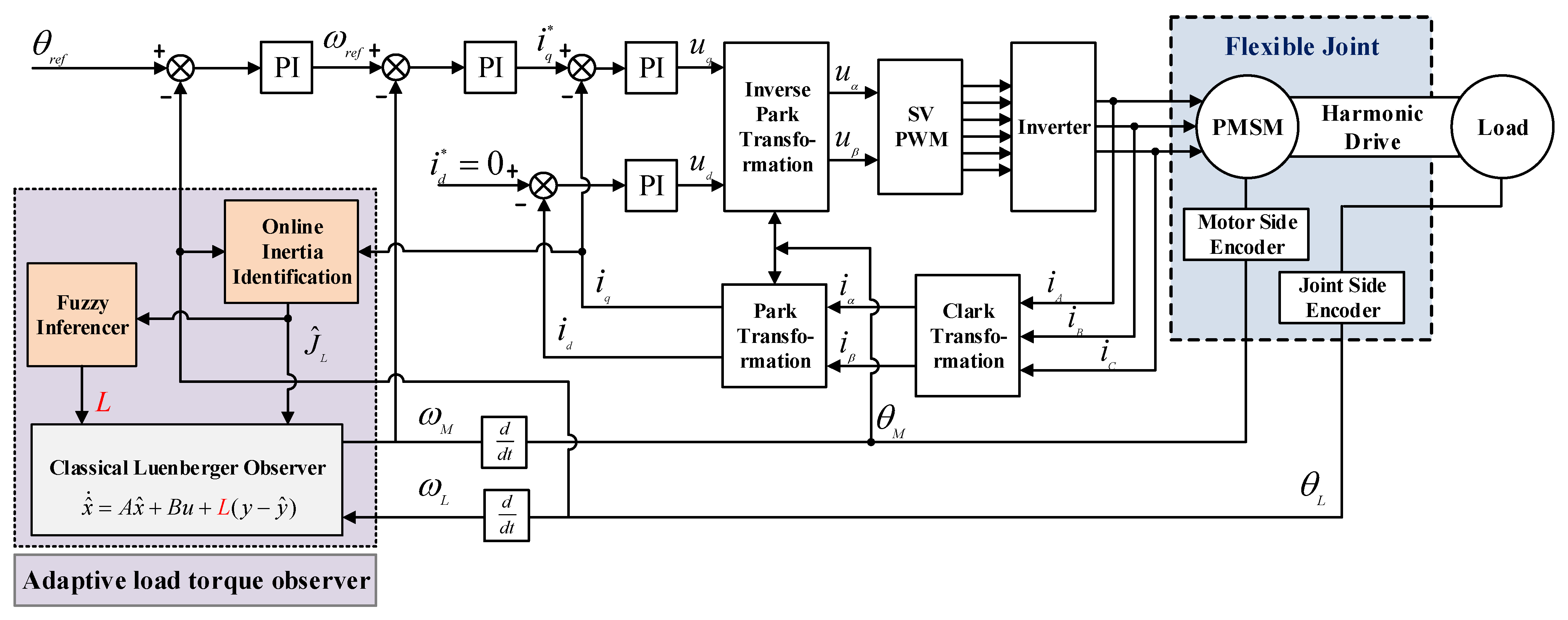
4. Fuzzy Inference-Based Torque Observer
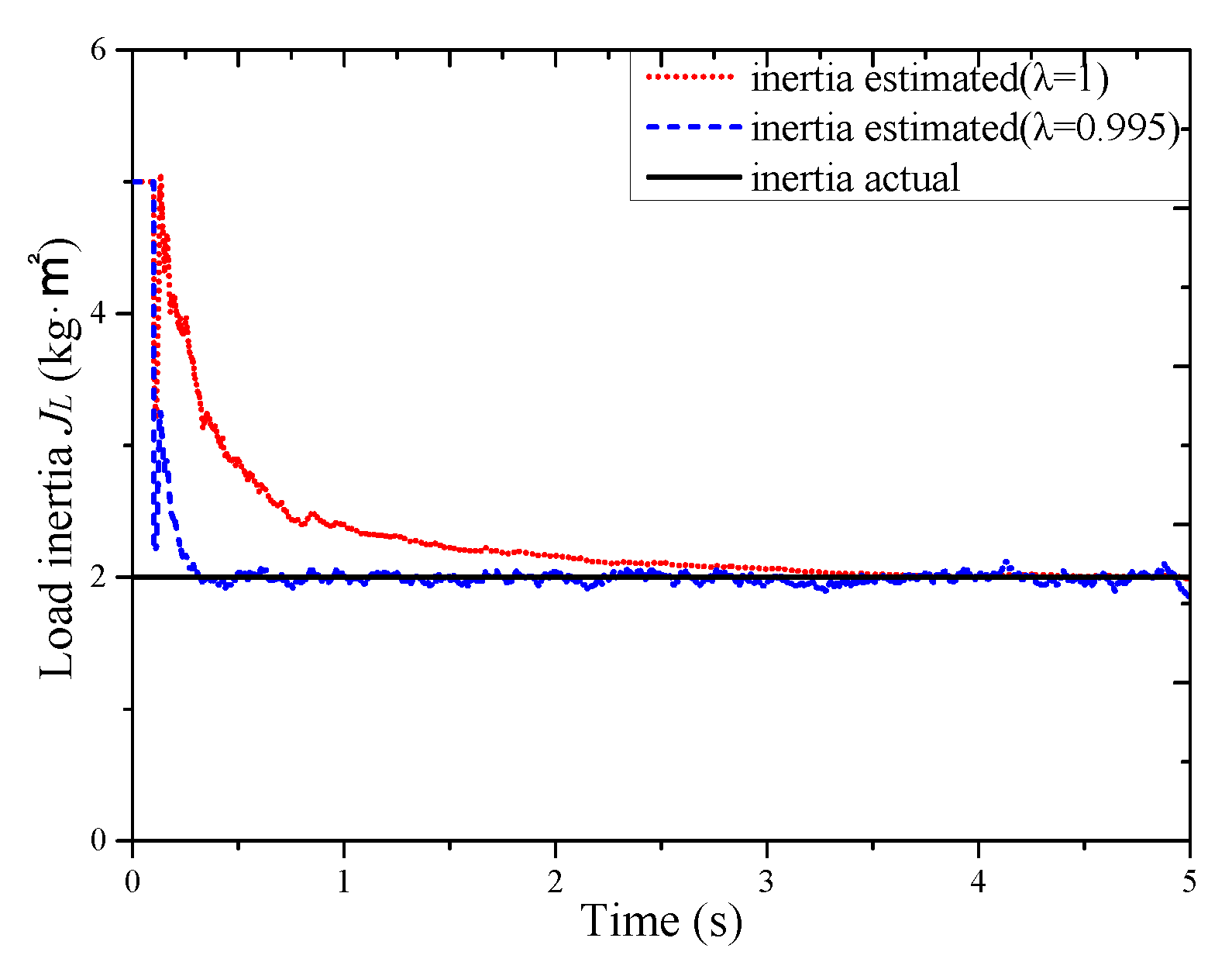
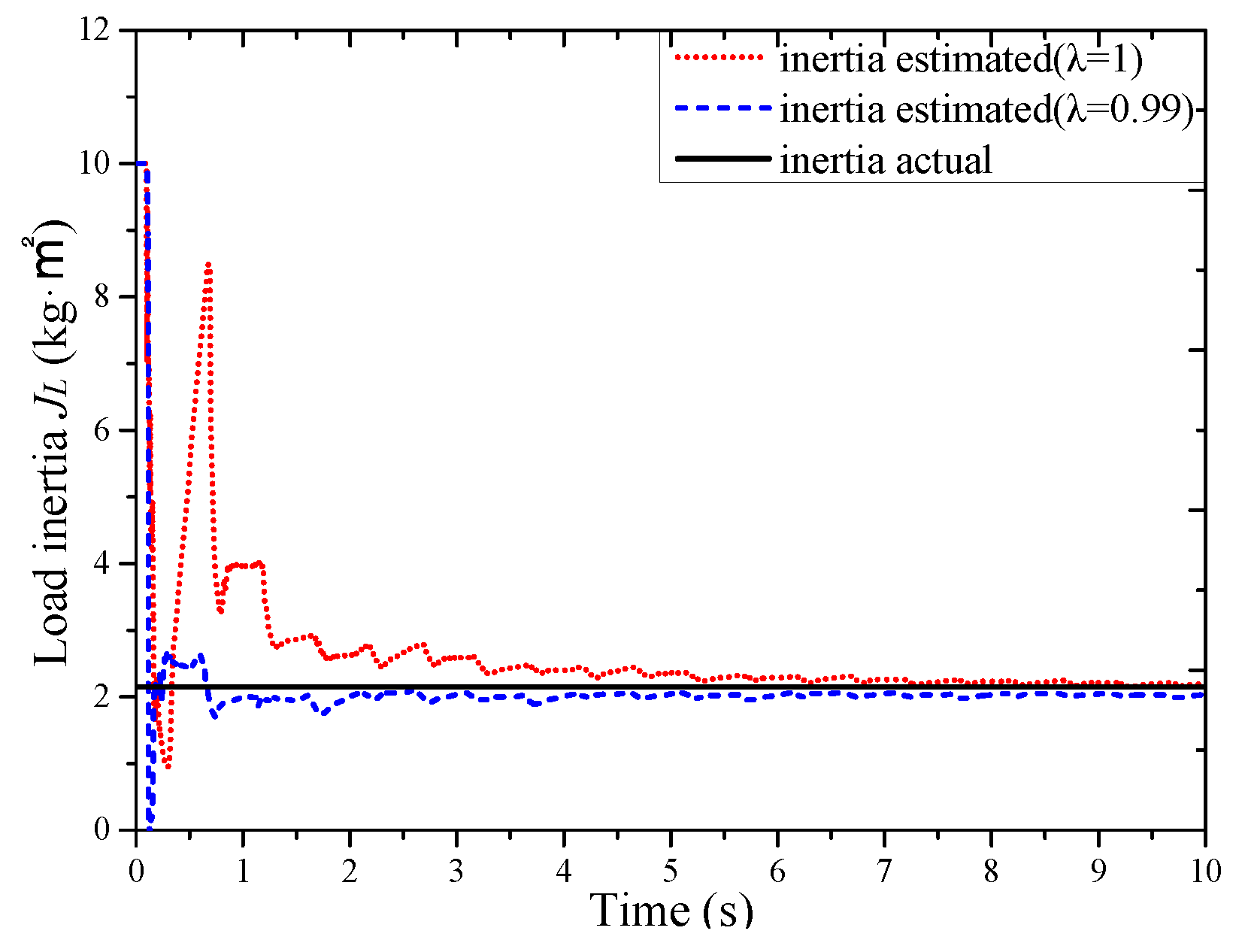
4.1. Online Inertia Identification
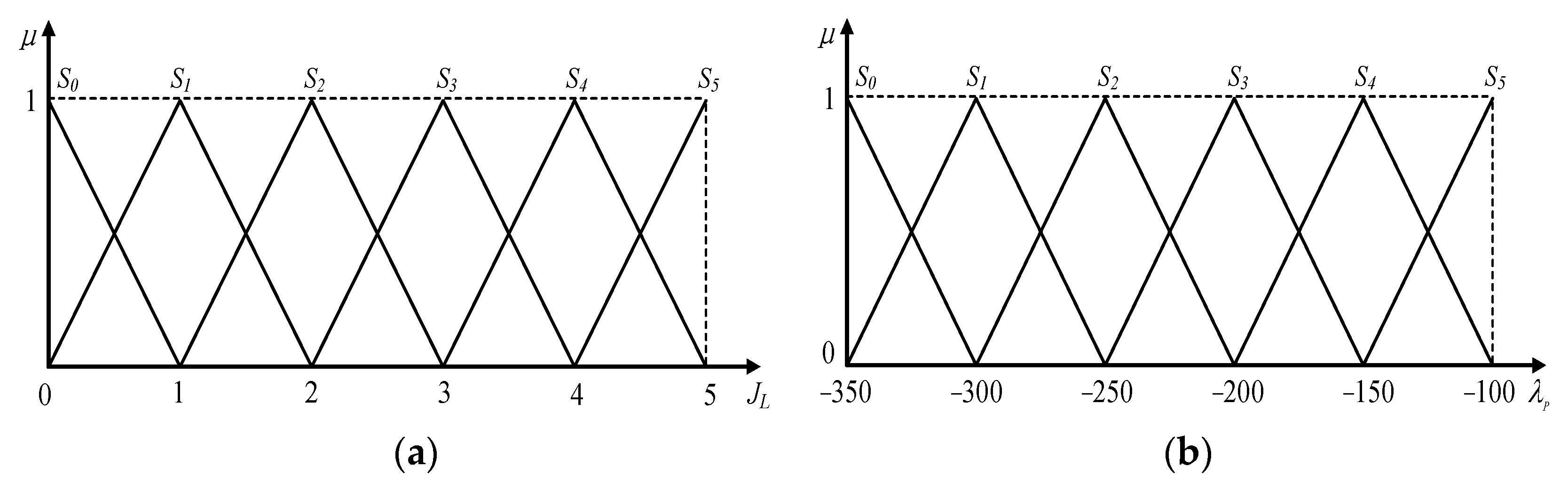
4.2. Adaptive Gain Matrix Design with Fuzzy Inference
5. Simulation and Experimental Results
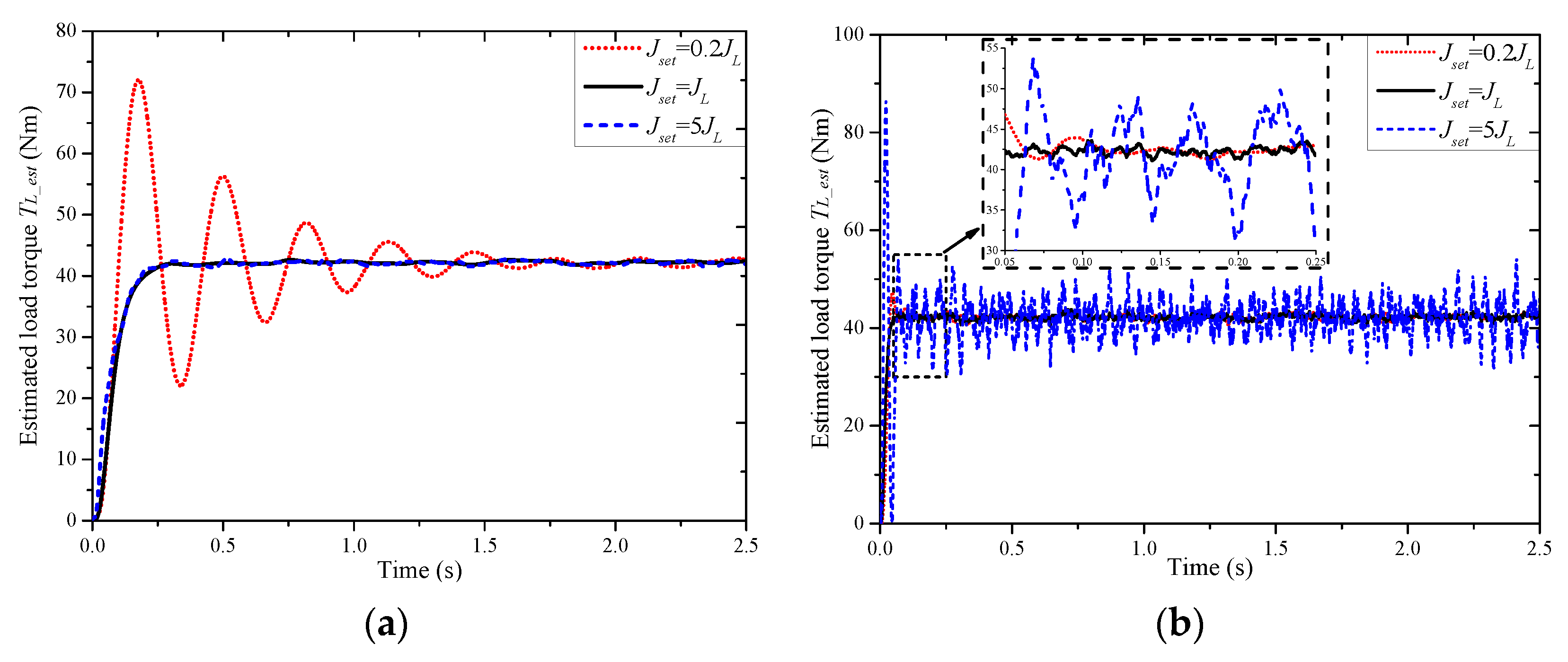
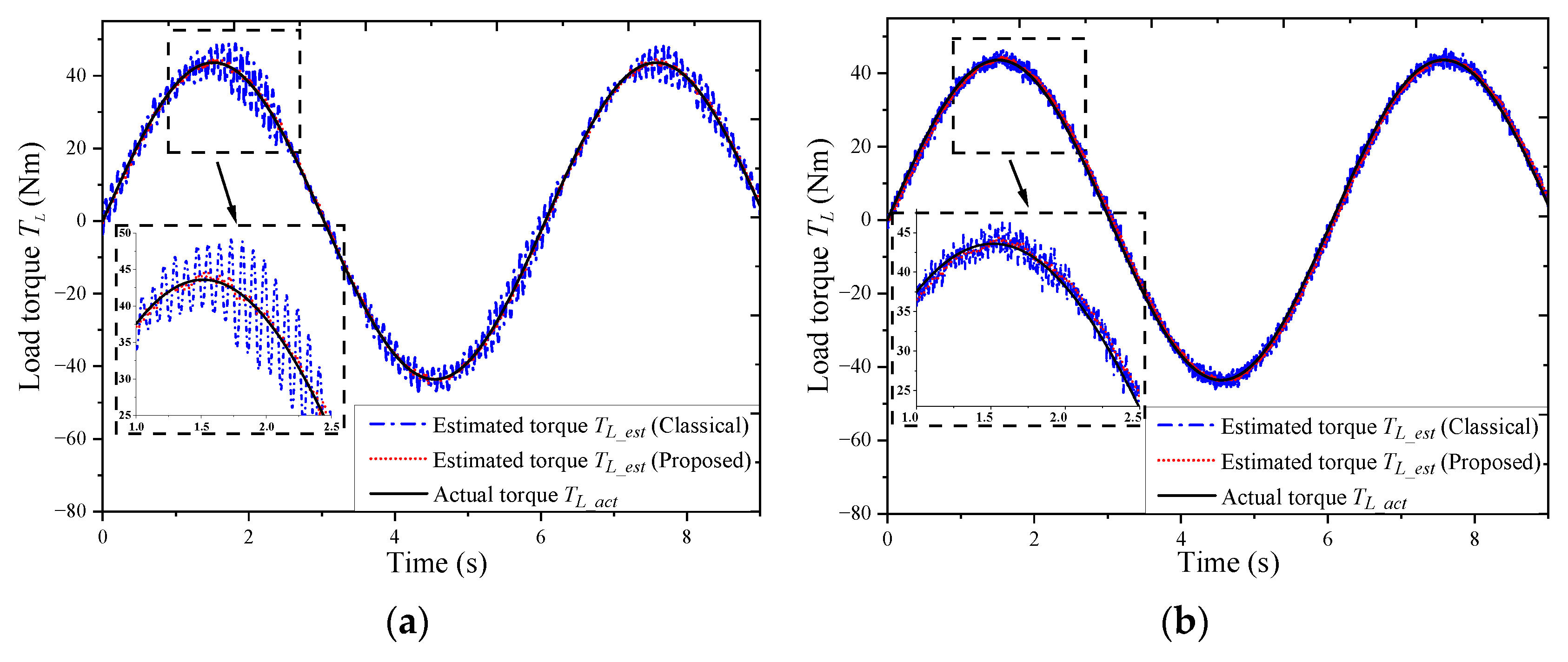
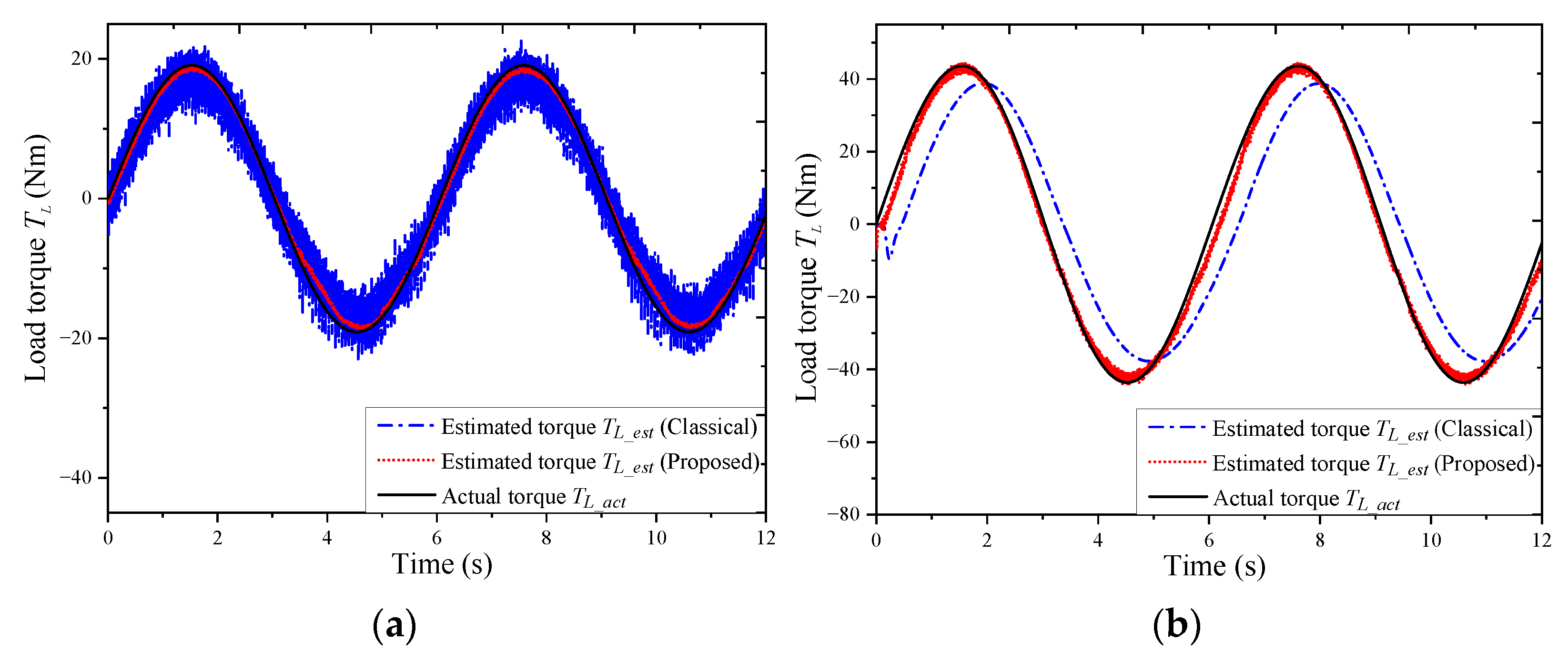
5.1. Simulation Results
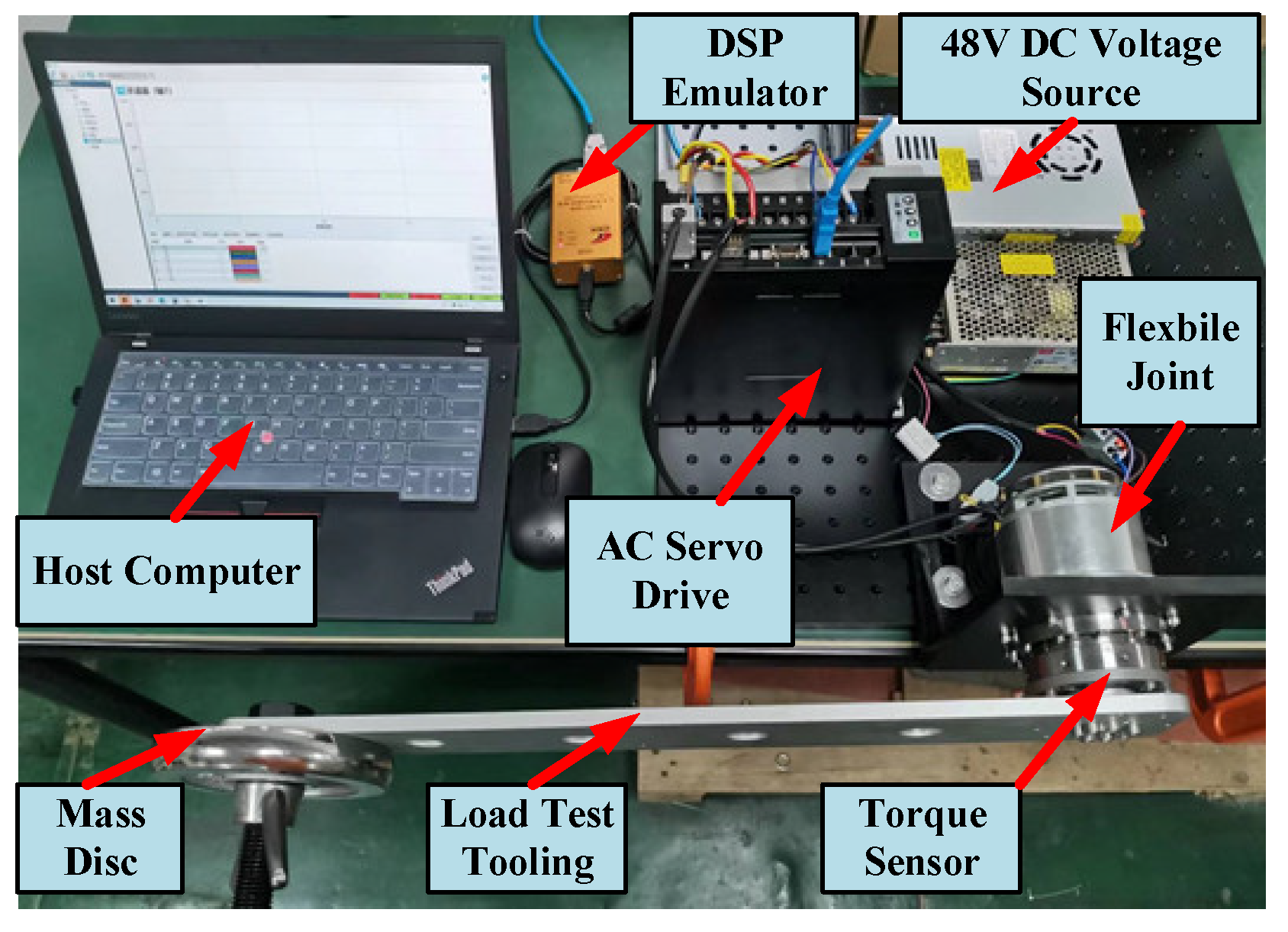
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ruderman, M.; Iwasaki, M. Sensorless torsion control of elastic-joint robots with hysteresis and friction. IEEE Trans. Ind. Electron. 2016, 63, 1889–1899. [Google Scholar] [CrossRef]
- Oh, S.; Kong, K. High-precision robust force control of a series elastic actuator. IEEE-ASME Trans. Mechatron. 2017, 22, 71–80. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Ceriani, N.M.; Rocco, P.; Ding, H.; Matthias, B. Safety in human-robot collaborative manufacturing environments: Metrics and control. IEEE Trans. Autom. Sci. Eng. 2016, 13, 882–893. [Google Scholar] [CrossRef] [Green Version]
- Albu-Schäffer, A.; Loughlin, C.; Haddadin, S.; Ott, C.; Stemmer, A.; Wimböck, T.; Hirzinger, G. The DLR lightweight robot: Design and control concepts for robots in human environments. Ind. Robot: Int. J. 2007, 34, 376–385. [Google Scholar] [CrossRef] [Green Version]
- Hazelden, R. Optical torque sensor for automotive steering systems. Sens. Actuators A: Phys. 1993, 37, 193–197. [Google Scholar] [CrossRef]
- Kashiri, N.; Malzahn, J.; Tsagarakis, N.G. On the sensor design of torque controlled actuators: A comparison study of strain gauge and encoder-based principles. IEEE Robot. Autom. Lett. 2017, 2, 1186–1194. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Ohnishi, K. Stability and robustness of disturbance-observer-based motion control systems. IEEE Trans. Ind. Electron. 2015, 62, 414–422. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.Q.; Zhang, Z.Y.; Wang, D.; Lu, K.Y.; Wu, D.; Ji, K.H.; Guo, L. A new load torque identification sliding mode observer for permanent magnet synchronous machine drive system. IEEE Trans. Power Electron. 2019, 34, 7852–7862. [Google Scholar] [CrossRef]
- Shi, Z.G.; Li, Y.K.; Liu, G.J. Adaptive torque estimation of robot joint with harmonic drive transmission. Mech. Syst. Signal Process. 2017, 96, 1–15. [Google Scholar] [CrossRef]
- Luenberger, D. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Ruderman, M.; Ruderman, A.; Bertram, T. Observer-based compensation of additive periodic torque disturbances in permanent magnet motors. IEEE Trans. Ind. Inform. 2013, 9, 1130–1138. [Google Scholar] [CrossRef]
- Nguyen, N.D.; Nam, N.N.; Yoon, C.; Lee, Y.I. Speed sensorless model predictive torque control of induction motors using a modified adaptive full-order observer. IEEE Trans. Ind. Electron. 2022, 69, 6162–6172. [Google Scholar] [CrossRef]
- Usama, M.; Choi, Y.-O.; Kim, J. Speed sensorless control based on adaptive Luenberger observer for IPMSM drive. In Proceedings of the 19th International Power Electronics and Motion Control Conference, Gliwice, Poland, 25–29 April 2021; pp. 602–607. [Google Scholar]
- Kubota, H.; Matsuse, K.; Nakano, T. DSP-based speed adaptive flux observer of induction motor. IEEE Trans. Ind. Appl. 1993, 29, 344–348. [Google Scholar] [CrossRef]
- Kaminski, M. Adaptive gradient-based Luenberger observer implemented for electric drive with elastic joint. In Proceedings of the 23rd International Conference on Methods & Models in Automation & Robotics, Miedzyzdroje, Poland, 27–30 August 2018; pp. 53–58. [Google Scholar]
- Hu, X.S.; Sun, F.C.; Zou, Y.A. Estimation of state of charge of a Lithium-Ion battery pack for electric vehicles using an adaptive Luenberger observer. Energies 2010, 3, 1586–1603. [Google Scholar] [CrossRef]
- Ibaraki, S.; Suryanarayanan, S.; Tomizuka, M. Design of Luenberger state observers using fixed-structure H-infinity optimization and its application to fault detection in lane-keeping control of automated vehicles. IEEE-ASME Trans. Mechatron. 2005, 10, 34–42. [Google Scholar] [CrossRef]
- Szabat, K.; Than, T.V.; Kaminski, M. A modified fuzzy Luenberger observer for a two-mass drive system. IEEE Trans. Ind. Inform. 2015, 11, 531–539. [Google Scholar] [CrossRef]
- Szabat, K.; Wrobel, K.; Drozdz, K.; Janiszewski, D.; Pajchrowski, T.; Wojcik, A. A fuzzy unscented kalman filter in the adaptive control system of a drive system with a flexible joint. Energies 2020, 13, 2056. [Google Scholar] [CrossRef] [Green Version]
- Gholami, A.; Markazi, A.H.D. A new adaptive fuzzy sliding mode observer for a class of MIMO nonlinear systems. Nonlinear Dyn. 2012, 70, 2095–2105. [Google Scholar] [CrossRef]
- Li, Z.J.; Su, C.Y.; Wang, L.Y.; Chen, Z.T.; Chai, T.Y. Nonlinear disturbance observer-based control design for a robotic exoskeleton incorporating fuzzy approximation. IEEE Trans. Ind. Electron. 2015, 62, 5763–5775. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2010; Volume 5. [Google Scholar]
- Zadeh, L.A. Outline of a new approach to the analysis of complex systems and decision processes. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 28–44. [Google Scholar] [CrossRef] [Green Version]
- Shihua, L.; Zhigang, L. Adaptive speed control for permanent-magnet synchronous motor system with variations of load inertia. IEEE Trans. Ind. Electron. 2009, 56, 3050–3059. [Google Scholar] [CrossRef]
- Kim, S. Moment of inertia and friction torque coefficient identification in a servo drive system. IEEE Trans. Ind. Electron. 2019, 66, 60–70. [Google Scholar] [CrossRef]
- Awaya, I.; Kato, Y.; Miyake, I.; Ito, M. New motion control with inertia identification function using disturbance observer. In Proceedings of the 1992 International Conference on Industrial Electronics, Control, Instrumentation, and Automation, San Diego, CA, USA, 13 November 1992; pp. 77–81. [Google Scholar]
- Zhang, X.G.; Li, Z.X. Sliding-mode observer-based mechanical parameter estimation for permanent magnet synchronous motor. IEEE Trans. Power Electron. 2016, 31, 5732–5745. [Google Scholar] [CrossRef]
- Song, Z.; Mei, X.; Jiang, G. Inertia identification based on model reference adaptive system with variable gain for AC servo systems. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 6–9 August 2017; pp. 188–192. [Google Scholar]
- Ke, C.; Wu, A.; Bing, C. Mechanical parameter identification of two-mass drive system based on variable forgetting factor recursive least squares method. Trans. Inst. Meas. Control 2018, 41, 494–503. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated speed nR | 33 rpm | Motor inertia JM | 1.2 × 10−4 kg·m2 |
| Rated current IR | 6 A | Motor torque constant kT | 0.141 Nm/A |
| Rated torque TR | 57 Nm | Motor flux linkage φ | 8.3 × 10−3 Wb |
| Rated power PR | 200 W | Motor viscous coefficient DM | 1.8 × 10−5 Nm·s/rad |
| Motor resistance R | 0.18 Ω | Joint viscous coefficient DL | 5.5 × 10−4 Nm·s/rad |
| Motor inductance L | 0.3 mH | Transmission ratio N | 101 |
| DC bus voltage VR | 48 V | Transmission stiffness KS | 28,000 Nm/rad |
| Load Mass Disc/kg | Actual Load Torque/Nm | Estimated Load Torque/Nm | Error |
|---|---|---|---|
| 2.5 | 19.1 | 18.4 | −3.6% |
| 5 | 31.4 | 30.6 | −2.6% |
| 7 | 43.6 | 42 | −3.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Song, B.; Zhou, X.; Gao, Y.; Chen, T. An Adaptive Torque Observer Based on Fuzzy Inference for Flexible Joint Application. Machines 2023, 11, 794. https://doi.org/10.3390/machines11080794
Liu Y, Song B, Zhou X, Gao Y, Chen T. An Adaptive Torque Observer Based on Fuzzy Inference for Flexible Joint Application. Machines. 2023; 11(8):794. https://doi.org/10.3390/machines11080794
Chicago/Turabian StyleLiu, Yang, Bao Song, Xiangdong Zhou, Yuting Gao, and Tianhang Chen. 2023. "An Adaptive Torque Observer Based on Fuzzy Inference for Flexible Joint Application" Machines 11, no. 8: 794. https://doi.org/10.3390/machines11080794