1. Introduction
IPMSMs (Interior Permanent Magnet Synchronous Motors) are applicable to a broad range of industrial applications and are extensively employed [
1]. Measuring the motor’s speed is necessary to acquire high precision and dynamic performance control for an AC motor with a broad speed range. Conventionally, PMSM is equipped with position sensors in order to achieve digital commutation and closed-loop control. However, the configuration of a position sensor is not always practicable due to space limitations, extreme environments, or other exceptional circumstances. In addition, implementing position sensors will increase manufacturing costs and complexity. Sensorless control does not directly measure speed and has emerged as the standard solution for controlling PMSM and IPMSM drives.
Sensorless control’s essential aspect is position estimation, which replaces conventional position sensors. Position-sensorless control mechanisms are classified into two main categories based on their control structures: non-feedback motion-sensorless control strategies and feedback loop motion-sensorless control strategies. The voltage/frequency (V/f) control methodology, as a typical non-feedback motion-sensorless control strategy, is extensively used in engineering domains due to its affordable expenses for installation, practicality, and insensibility to the application atmosphere [
2,
3]. Nonetheless, if the ratio between voltage and frequency is not appropriately chosen, the V/f control approach fails to maintain synchronization readily and can even cause damage to electronic devices under conditions of initial substantial load or instantaneous load changes. In order to enhance the stability of the traditional V/f control technique [
3], stabilization loops need to be implemented. Contrary to the V/f control method, I/f control generates the desired voltage using a current closed-loop regulator that ensures stable start-up, self-stabilization of torque and power angle, preventing overshoot, and anti-disturbance capability [
4,
5].
In motion-sensorless feedback-loop control approaches, rotor position knowledge is crucial. Feedback-loop motion-sensorless control mechanisms are additionally categorized into two subcategories based on the distinct assessment principles for rotor-position information: injection of a high-frequency carrier signal method (IHFCSM) [
6,
7,
8] as well as model-based techniques [
9,
10,
11,
12,
13,
14,
15,
16,
17]. The IHFCSM offers a promising solution by utilizing magnetic saliency identification and introducing a signal with an HF to interact with rotor-orientation-dependent saliencies. Such approaches can perform well at zero to low speeds and are irrespective of the back electromotive force (EMF) and machine parameters. Still, as the machine speed increases, they encounter issues such as additional losses, ripples in the torque, high-frequency noise, and power losses, which can only be applied to saliency motors and constrained control performance brought on by the additional filter [
8]. Model-based solutions, comprising flux linkage estimation methods [
13,
14,
15,
16,
17] and back-EMF estimation strategies [
9,
10,
11,
12], are passive techniques that do not rely on signal injection. In the preceding, numerous EMF observers have been established and utilized in industrial and commercial environments. These techniques have demonstrated satisfactory performance in regions of moderate and high speed. However, as the motor RPM goes down, the rotor orientation may be imprecisely acquired since the EMF gradually decreases, and disappearance is insufficient to provide accurate knowledge about the rotor orientation at minimal or zero velocities. To accomplish sensorless position control of the PMSM throughout the entire speed domain, hybrid position estimation solutions [
9,
10,
11] that combine the aforementioned two approaches are commonly employed. The SFL estimation technique is anticipated to facilitate broader speed domain sensorless operations compared to the EMF estimation strategy because of the proven fact that the rotor flux linkage remains unchanged and is practically constant regardless of speed; however, since sensors always have a Doff, a pure integrator has drift issues.
A precise flux linkage acquisition mechanism with an online compensation strategy for drift and residual drive system errors is described by Kyung-Rae Cho and Jul-Ki [
13]. Advocating a simple integration approach using a simple resonant-type observer design produced exceptional flux linkage estimation fulfilment down to 1.3 Hz stator frequency. In reference to stator flux linkage estimation, an integration scheme based on a fifth-order filter is discussed by [
14], along with a high-pass filter (HPF) and a logical calculation element; this scheme achieves identical phase and amplitude-frequency characteristics as a simple integrator at any synchronous rotational frequency. A novel approach for estimating flux linkage, utilizing the dual (SOGI-FLL), is introduced by [
15]. This method can mitigate the effects of Doff and high-order harmful harmonics while enhancing the system’s dynamic response. A linear regression-based nonlinear observer has been designed for motion-sensorless control of IPMSMs, and a pseudo-high-pass filter is employed to remove the impacts of Doff [
16]. The problems of DC saturation and Doff are solved by the Gopinath model SFL observer, which integrates the currents and voltage models [
17]. In the majority of such flux linkage-based estimator approaches, the LPF is typically used in combination with angle adaptation techniques or a feedback-loop flux linkage observing system. This is performed to eliminate issues related to DC saturation and Doff while simultaneously increasing the speed of iterative operation. However, system stability must be carefully considered alongside these measures.
In the scientific literature, two well-established techniques have been proposed for flux estimation in PMSMs. The preliminary approach is based on the PMSM voltage-flux principle. Back EMF is calculated using known voltage and current information in a stationary reference frame (SRF). Subsequently, fluxes are determined by integrating the electromagnetic field [
18]. However, this approach has a number of disadvantages; the main issue is associated with using the open-loop integrator, which includes the saturation difficulties induced by the Doff in currents or, commonly in EMF, the Doff caused by an unknown initial state in EMF. Other problems are the same phenomenon of saturation and Doff problems for high-order harmonics and slow-speed analysis challenges [
19]. Since actual voltages and currents in the SRF are determined using a method commonly referred to as Clark transformation, the key benefit of the method is that fluxes can be estimated without knowing the rotor position. One common approach to improving the efficacy of flux estimation using a voltage model is to use a low-pass filter (LPF) instead of a pure integrator.
The LPF can address the saturation difficulties, and the Doff is drastically reduced because it is inversely proportional to the LPF frequency [
20,
21]. However, the LPF induces a phase transition and a reduction in flux magnitude, and this approach malfunctions whenever the motor rpm is equal to or slightly lower than the filter’s cut-off frequency. To resolve this issue, a compensation term is added to account for the phase delay and amplitude decreases. The LPF can adequately enhance the accuracy of a flux estimation technique that employs a voltage equation with a compensator [
22,
23,
24]. Nonetheless, the presence of an EMF signal introduces disturbances into the system and degrades its significance. Furthermore, harmonics also cause challenges, such as saturation state and Doff for other harmonics, which cannot be resolved using the LPF and compensator developed for the fundamental harmonic. Considering the potential benefits of no model limitations along with a low noise level, a flux estimator emerges as an appealing approach for motion-sensorless control.
In contrast, the drift induced by a simple integrator has limited use in precise motor control. Similar to the EMF, the stator flux linkage (SFL) contains information about the rotor’s position. However, unlike back EMF, the magnitude of the SFL amplitude waveform remains constant regardless of the speed. Another technique for improving the flux estimator’s performance is employing the closed-loop method by adjusting the based on approximate frequency [
25]. An important example of this is the second-order generalized integrator-frequency-locked loop (SOGI-FLL) proposed in [
26], demonstrating an exhibiting excellent efficiency under constant-speed conditions. Meanwhile, these techniques are inapplicable in situations involving variable speeds, including trajectory tracking, because filters generally compromise static and dynamic performance.
Recently, the fundamental frequency of an EMF has been extracted using a Second-Order Generalized Integrator (SOGI) before integration [
27,
28,
29]. However, the SOGI technique has limitations in suppressing the DC component. To address this issue, a third-order generalized integrator has been proposed [
30]. Despite these improvements, the voltage model is unable to correctly handle transient machine performances, such as accelerating, decelerating, crossing zero speed, and low speeds, due to a negative correlation between flux amplitude and rotation rate. The second approach depends on the stator current flux model of a PMSM, which approximates fluxes directly by utilizing inductances, rotor permanent magnet flux, and monitored currents [
31,
32]. This method overcomes most of the flux estimation shortcomings associated with the voltage model technique by eliminating the need for an open-loop integrator. The current model is particularly efficient at low speeds and during speed reversal procedures, such as stand-still speed crossings.
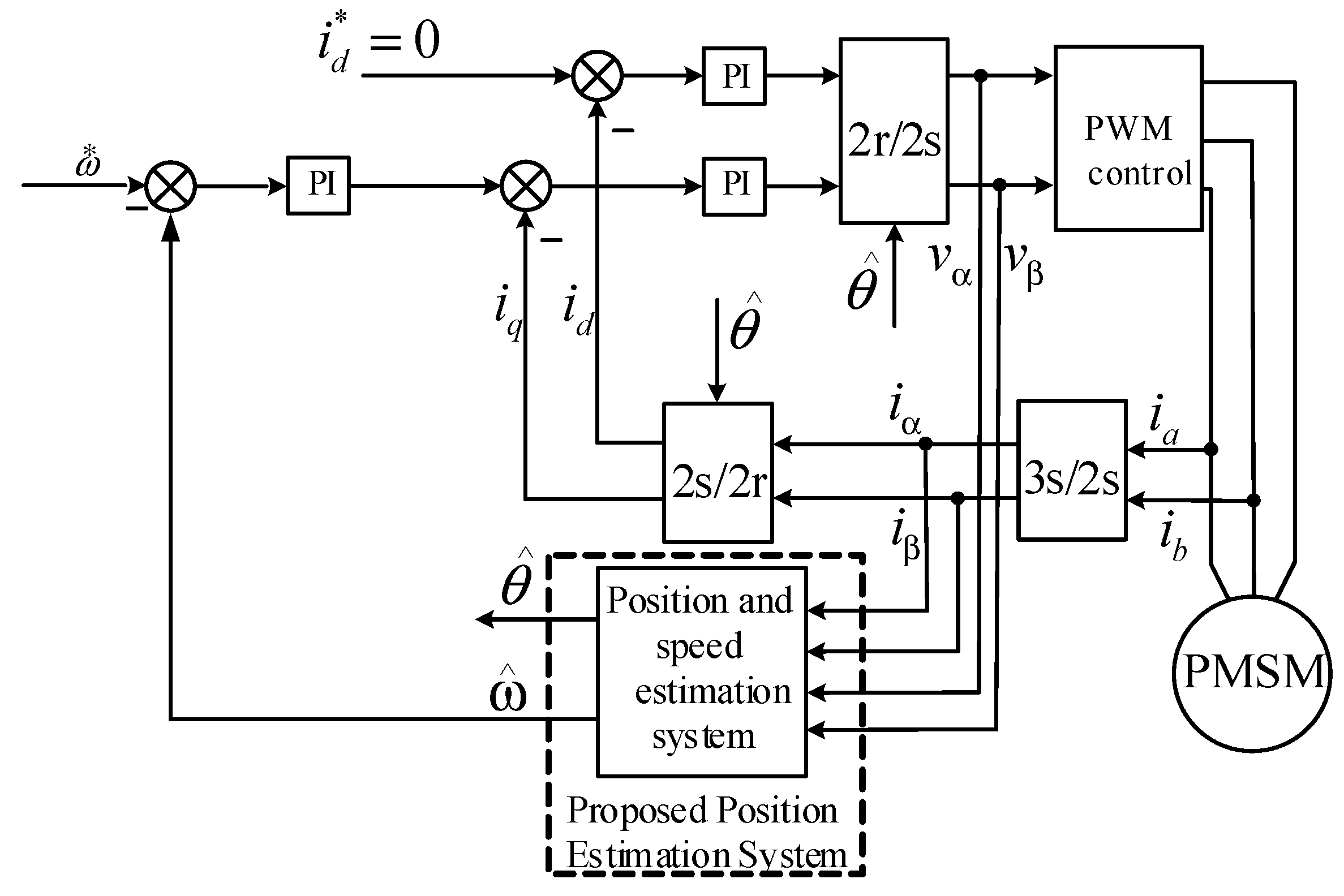
In this article, the authors propose two compensation techniques to determine and eliminate the drift error generated by the voltage transducer during rotor position estimation. The aim is to achieve precise rotor position estimation without any phase error. The compensator employs a PI controller to remove the undesired signal and ensure that the flux magnitude matches the actual value. Typically, adaptive observers estimate the flux using the time-variable, full-order PMSM model. At least one of the model’s equations must contain a speed-dependent element, while the observer should be constantly speed-adaptive. Obtaining rotor speed is typically the final phase of the assessment procedure. Consequently, cumulative errors, time delays, and system noises always have an impact on the speed estimation. This erroneous speed assessment is feedback to the adaptive flux estimator, causing the precision of both the flux and speed estimator to deteriorate gradually. Undesirable outcomes, such as limit cycles, increased delays, or noise sensitivity, can degrade the system’s overall performance, especially at very low stator frequencies with low fundamental excitation. Fortunately, the proposed method includes two Doff compensators and non-adaptive observers that utilize a PI controller to eliminate the error signal. It ensures that the flux magnitude matches the actual value. Furthermore, since they do not rely on rotor speed adaptation, both Doff compensation algorithms are essentially sensorless and thus not affected by speed estimation errors. Moreover, an integral part of a particular PI correction system at the voltage model level makes both observers robust against measurement drift and Doff. From a structural perspective, each estimator is summarized. The rotational speed and position of an IPMSM can be estimated in a phase-locked loop (PLL) utilizing the SFL’s cross-product derived from the integral model of stator voltage and currents, as well as the estimated SFL. To validate the proposed method, the two compensation algorithms were employed to eliminate the drift error component. These algorithms underwent theoretical investigation, and the validity of the method was verified through simulations and laboratory experiments using Matlab Simulink as well as 7.5 kW IPMSM.
3. The Proposed Techniques of the Flux Estimator for IPMSM Sensorless Control
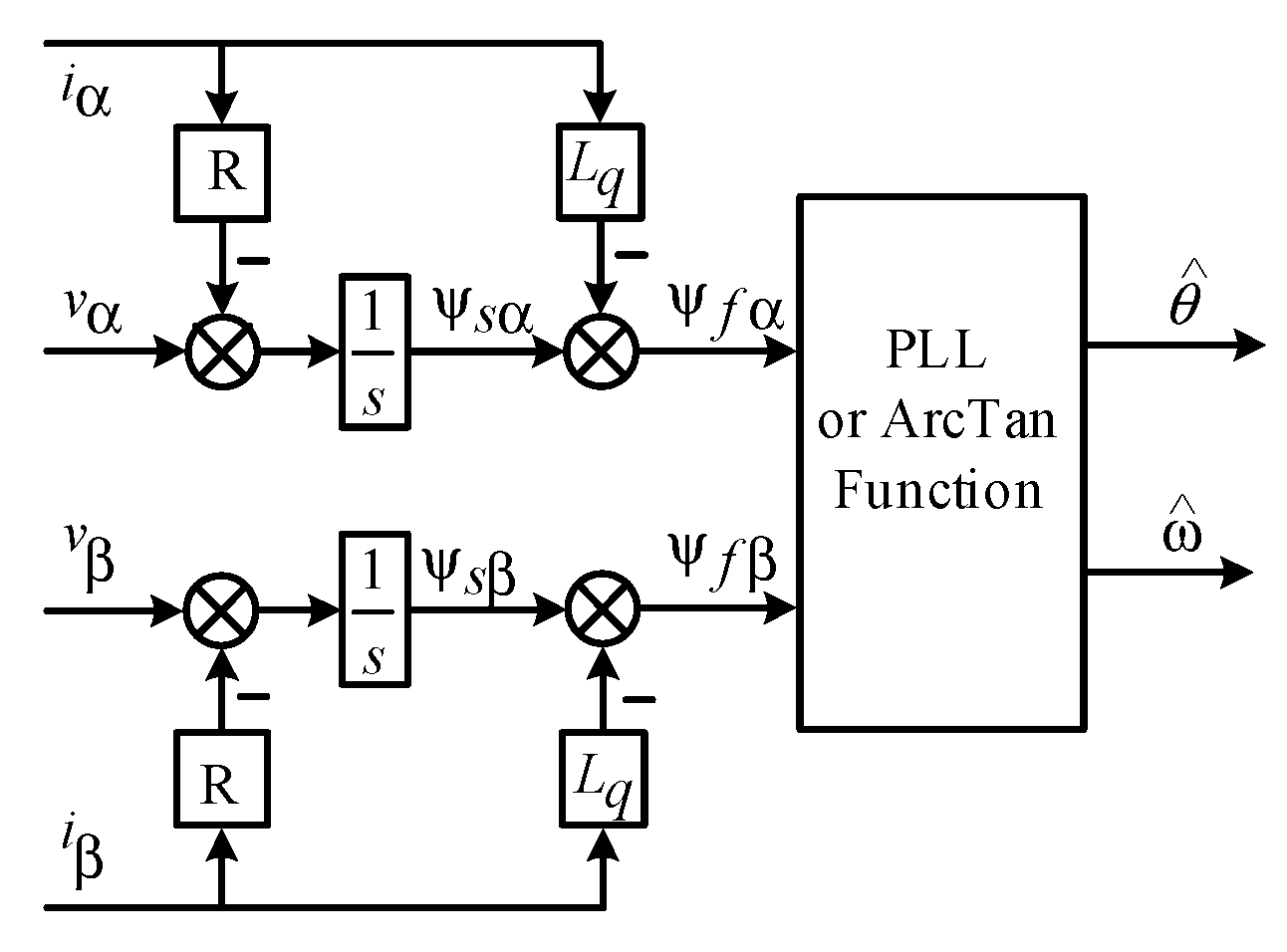
The presence of a Doff component in the stator voltage significantly impacts the evaluation of flux linkage. In order to compensate for integration errors, it is essential to incorporate feedback along with the integrator structure. The stator flux linkage, like the back EMF, contains knowledge about the rotor position (RP). However, unlike back EMF, the magnitude of the flux linkage’s amplitude waveform remains constant regardless of speed. This property makes the flux linkage a more reliable state to estimate, particularly at low speeds. This characteristic becomes very crucial at slow speeds and during rapid transients when the speed estimation is often imprecise. In addition, the proposed flux observer technique improves overall robustness. The proposed flux estimator consists of a pure integrator, a drift eliminator, and a flux linkage observer with a PLL/arctangent function. The voltage-based model in stator reference (10) is a highly desirable approach for sensorless stator–flux estimation in all sinusoidal flux distribution AC machines. However, a pure integrator is sensitive to drift because sensors always include a Doff. It integrates the calculated EMF as follows:
Transforming the stator currents
and
into a
-coordinate system, then,
and
can be written as:
The stator current in the
frame can be expressed as follows:
The accumulative flux-linkage vectors can be defined as a function of the two-phase rotating frame (the d-q frame), which is written as Equation (13), also known as the current model:
where
is the estimated flux;
and
are the estimated inductances on the d- and q-axis, respectively; and
is a permanent magnet flux linkage.
The transformation from the
to the
frame is stated below:
The following results can be established by substituting Equation (13) with Equation (14) and transferring the currents from the
frame to the
frame:
Since the stator coil currents are used directly to estimate the flux, and no integral operation and stator resistance are required, Equation (15) is more precise than the voltage model (4) in the slow-speed domain. Specifically, the current sensor provides information about the stator current, thus enabling excellent estimation performance, particularly at low speeds. Due to this advantage, the suggested approach is efficient and capable of accurately estimating position in the slow-speed domain. For the PLL design in
Figure 3, when the angle of intersection concerning
and
is minimal, it results in
, and the feedback-loop transfer function of PLL near the equilibrium point is given as follows:
This is a typical second-order system with a pole and zero. The proportion and integration coefficients designed in this paper are given as follows:
In Equation (17), represents the system-damping coefficient, whose assigned value , whereas the variable denotes the undamped oscillations frequency of the system, which is based on the motor’s RPM operating range. For this calculation, we assume to be 1000 rad/s. Since PLL’s open-loop transfer function has a couple of integration links, for the step input of speed, is a ramp input, which can achieve no static error; i.e., in a steadystate, is a parabolic input with static error for the speed ramp input, and the magnitude of the static error is in reciprocal proportion to .
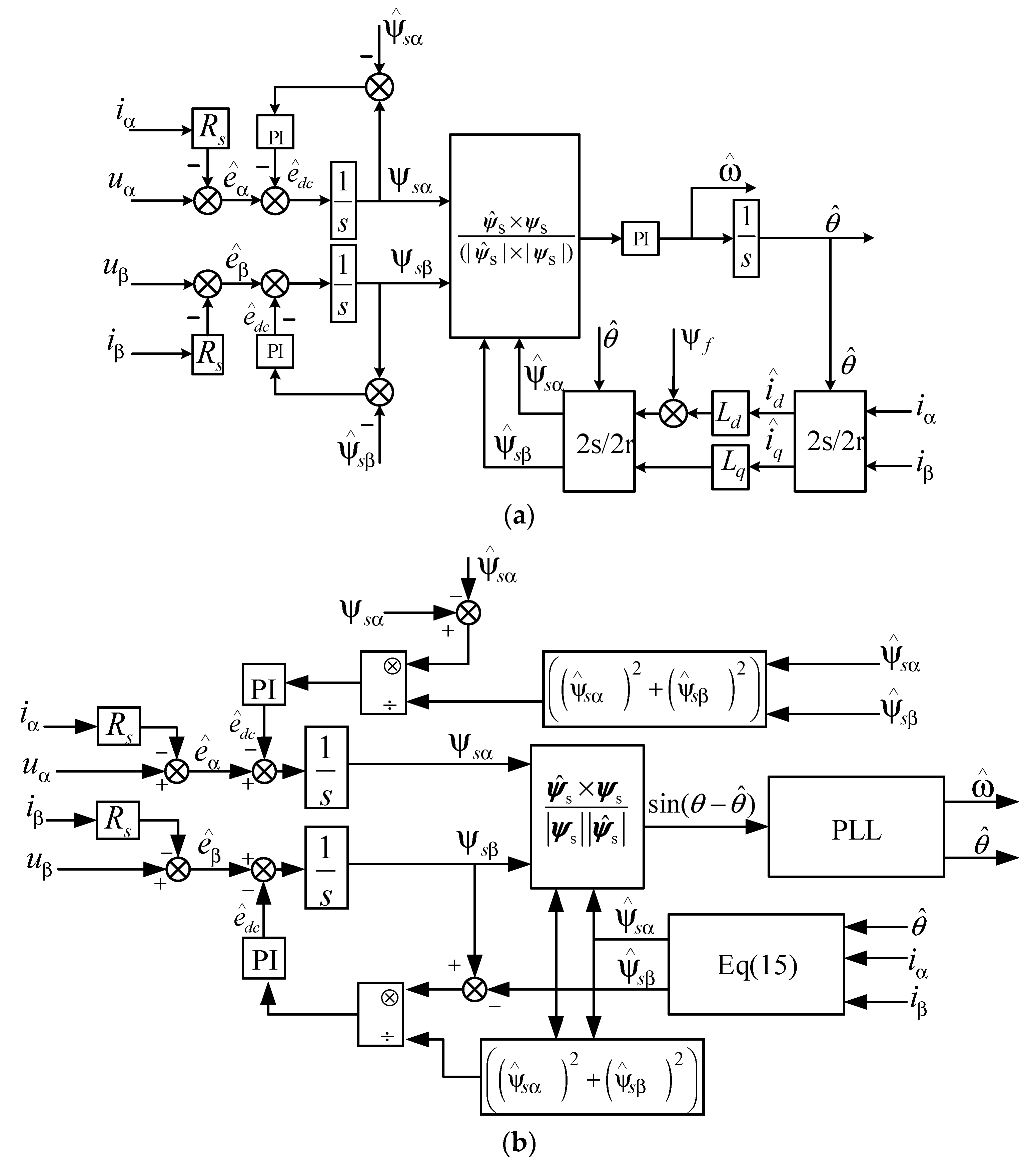
3.1. Drift Elimination Strategy 1
Figure 3a depicts a drift elimination technique established on the orthogonality of the
and
-axes that is assured by the physical structure of the motor and a three-phase balance.
A physically perceptive method is devised below. In the most common scenario of accurate amplitude flux control, the optimal stator–flux trajectory
, with respect to the stator reference, is a symmetrical circle centered on the origin. If a flux Doff of
appears, the rotation of a resultant stator flux
is also a circular shape; however, its origin is shifted by
. Consequently, the estimated flux offset
can be determined using Equation (18), which provides knowledge about circular eccentricity.
The back EMF and stator flux are defined as:
where
and
represent the Doff signal, which is fundamentally a time-proportional signal. Based on
Figure 4, the Doff error signal can be calculated by:
The flux DC drift
is caused by an input voltage Doff
or by an inaccuracy in the initial state of the stator flux
. A PI feedback correction employing
(18) is used to eliminate
. The design determines
, which compensates for the disturbances
, especially forcing
onto a circular path centered on the origin. The disturbance compensation employs a PI compensator with the parameters
and
to estimate the DC-drift input vector
, which is depicted in
Figure 4. In the drift elimination strategy 1, during a feedback loop, the PI controllers
and
coefficients are modified to 103 and 205, respectively. In addition, the PI controller eliminates steady-state inaccuracy. The feedback loop PI parameters compensator affects the sensorless control performance. Increasing the
and
values increase the overshoot and settling time while decreasing the steady-state error. Therefore, the control system needs more time to eliminate the Doff in real time; selecting
and
lower leads to degraded controller performance.
Moreover, the inaccurate selection of feedback PI controller parameters ( and ) results in overall system performance instability. Therefore, these parameters need to be accurately selected. Thus, drift elimination strategy 2 is proposed, which is more accurate, simple, and robust.
3.2. Drift Elimination Strategy 2
This algorithm utilizes
with the Doff component eliminated by the Doff compensation. The drift elimination strategy 2 response to removing the Doff error component from the system is faster than that of drift elimination strategy 1, as shown in
Figure 5. Therefore, this approach is more efficient compared to drift elimination drift elimination strategy 1.
The transfer function equivalent of a feedback-loop simple integrator with PI compensation is obtained by:
The weighted variable , which is defined by the magnitude of the stator–flux error, accentuates a frequency-adaptive performance of the estimator; a minimal results in wide bandwidths. If , the analogous structure is a high-bandwidth simple integrator with no phase delay.
Therefore, the estimation error due to drift is given by:
where
and
represent the PI controller’s estimated drift signal. Taking the derivation of (23), one can derive:
where
assuming that:
By substituting (25) into (24) and computing the derivation, the second-order differential function can be determined as:
which is the standard dynamic equation of the PI controller;
will exponentially converge to zero. Similarly, it has been deduced that if
, it is assumed that
will converge exponentially to zero because drift is proportionate to the time
and
, to which both are equivalent to
. To obtain a rapid asymptotic estimate, free of oscillations for
, the following PI controller parameters can be determined:
,
, and
,
, where
represents the minimal stator frequency.
The integral component of PI retains the input Doff computation . If the EMF (10) is assessed precisely by , then and ; subsequently, and a simple integrator has been obtained. In drift elimination Drift Elimination Strategy 2, the derivative estimation provides rapid estimation and improved computation in the presence of the same Doff.
The flux estimator functions as an integrator with no delay and high dynamics. The designed flux estimation method is capable of being utilized for the sensorless control of AC motors with sinusoidal flux distribution, such as PMSM, IM, etc., over a broad speed range. Consequently, drift elimination scheme 2 ensures faster Doff rejection.
5. IPMSM Motor Experimental System Based on dSPACE
The structural diagram of the real-time simulation experimental system for IPMSM based on dSPACE is shown in
Figure 10. The system consists of a computer, dSPACE single-board DS1103, transfer circuit, inverter, current and voltage detection link, and IPMSM. The voltage and current signals of the IPMSM are detected by Hall sensors and sent to the transfer circuit for conditioning. The IPMSM experimental platform, depicted in
Figure 11, is constructed in the laboratory. It mainly consists of IPMSM, DC Cabinet, an inverter, and control methods using the dSPACE equipment in the loop system. Matlab software is used for simulation modeling with a real-time interface that compiles and uploads seamlessly to dSPACE 1103. The position of the rotor is detected by a transducer. However, this position is only used for comparison with the estimated position and is not utilized for IPMSM speed control. An LPF is used to filter speed assessment obtained from the differential of the observed rotor position.
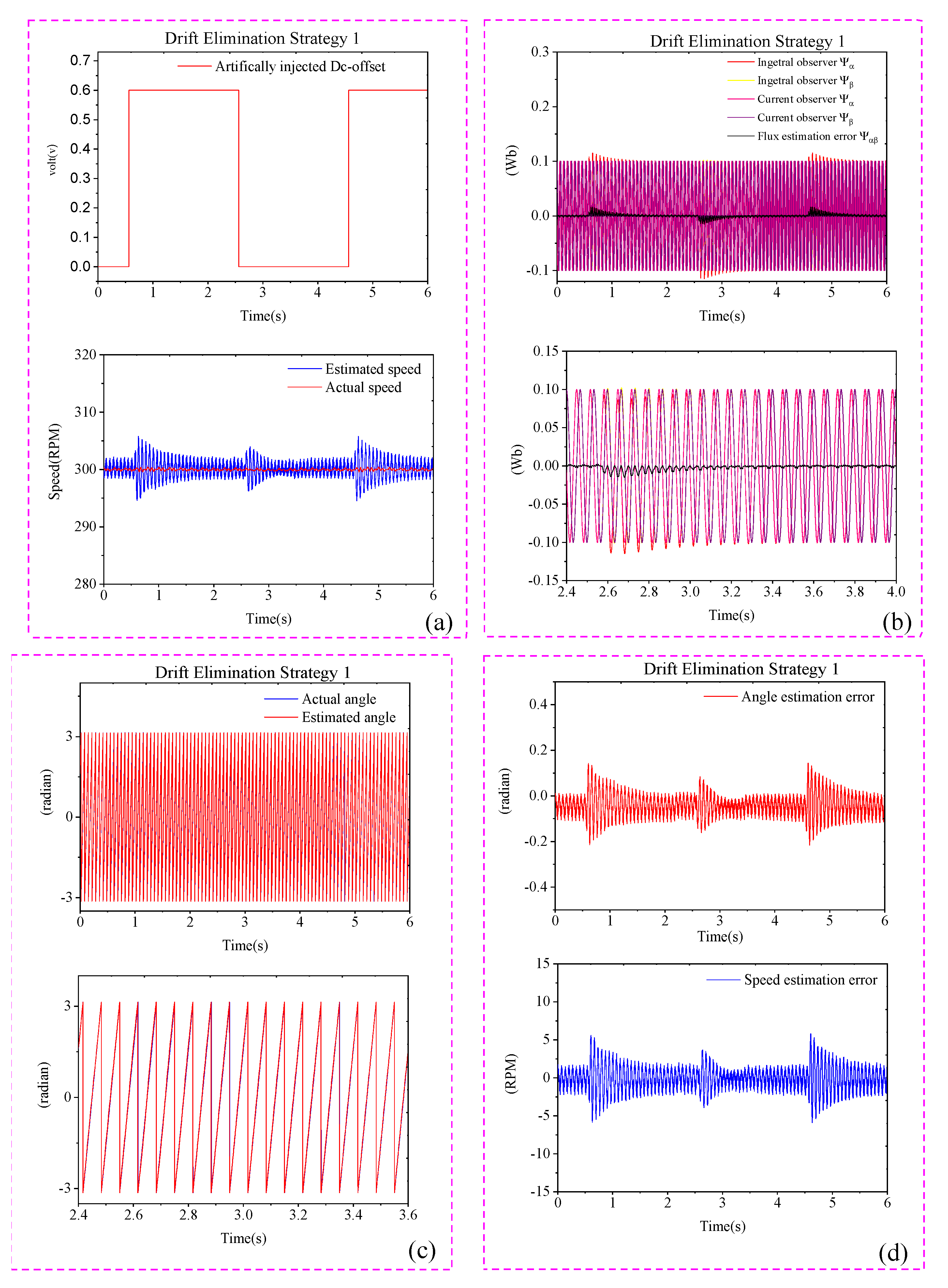
It is well known that the Doff is a severe issue in estimation schemes, as even a small Doff can result in significant oscillations in the estimated quantities. In order to evaluate the efficacy of the DM1 and DM2 drift elimination strategies with Doff, the experimental investigation is conducted with a Doff error component ranging between 0 V and 0.6 V, which is artificially injected into the stator voltage
-axis during the no-load condition.
Figure 12 shows the artificially injected Doff error component, rotor speed, flux estimation, rotor position estimation, and position and speed estimation error results using the DM1 method. On the other hand,
Figure 13 shows the results with the DM2 method. The experimental outcomes depicted in
Figure 12 and
Figure 13 indicate that both DM1 and DM2 exhibit good robustness against Doff. In other words, the proposed DM1 and DM2 methods demonstrate that the real-time correction characteristic remains effective even when the Doff error value changes. However, it should be noted that the drift elimination response under DM1 control is slower compared to DM2. On the other hand, DM2 provides a smoother, faster drift elimination response and more stable speed and position estimation.
Figure 14 and
Figure 15 illustrate the experimental results of sensorless control using the DM1 and DM2 techniques at 300 rpm. In these experiments, a Doff error component ranging from 1.0 V to 1.5 V is artificially injected into the stator voltage
-axis. The experimental results shown in
Figure 14 and
Figure 15 indicate that both DM1 and DM2 exhibit strong robustness against the Doff. Due to the ability of DM1 and DM2 to effectively eliminate the DC disturbance, the estimated stator flux experiences almost no Doff.
In the experiment, artificially injected DC disturbance signals with amplitudes of 1.5 V and 1 V were injected into the stator voltage
-axis to evaluate the DC disturbance rejection capabilities of the DM1 and DM2 drift elimination strategies.
Figure 16 illustrates the results obtained with the DM1 method, including artificially injected Doff error component, rotor speed, flux estimation, rotor position estimation, and position and speed estimation errors.
Figure 17 illustrates the results obtained with the DM2 method. The experimental outcomes depicted in
Figure 16 and
Figure 17 indicate that both DM1 and DM2 exhibit good robustness against the Doff. Both algorithms were able to eliminate the DC disturbance, resulting in nearly zero Doff in the estimated stator flux. Based on the experimental tests, it can be concluded that both proposed drift elimination algorithms provide accurate correction performance in the presence of a Doff error component.
Based on the simulation and experimental results presented, the proposed model effectively achieved a good dynamic performance of the IPMSM. The DM2 estimator was more robust than the DM1 estimator. The results show that the system has excellent estimation accuracy under a broad range of situations. An evaluation
Table 5 is presented to compare simulation results and experimental results considering
Figure 8,
Figure 14 and
Figure 15, respectively, in order to clarify the enhancements obtained with the proposed strategy.
By comparing the simulation results in
Figure 7,
Figure 8 and
Figure 9 with the experimental results in
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17, it can be noticed that when the computer-based Matlab simulation conditions match the laboratory test conditions, the conclusions drawn from the Matlab simulation and laboratory experiment are identical. However, the waveforms show slight differences, which is attributed to the ideal voltage and current sampling employed in the simulation, which eliminates disturbances from external variables. On the other hand, in the laboratory experiment, the voltage and current are obtained using electrical sensors, which can lead to slightly less accurate measurements due to various sources of interference. As a result, the observed control effects of each variable in the experimental findings may differ partially from those observed in the Matlab simulation. Nevertheless, the validated conclusions remain consistent between the two methods.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}