
Hardware-in-the-Loop Scheme of Linear Controllers Tuned through Genetic Algorithms for BLDC Motor Used in Electric Scooter under Variable Operation Conditions
 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
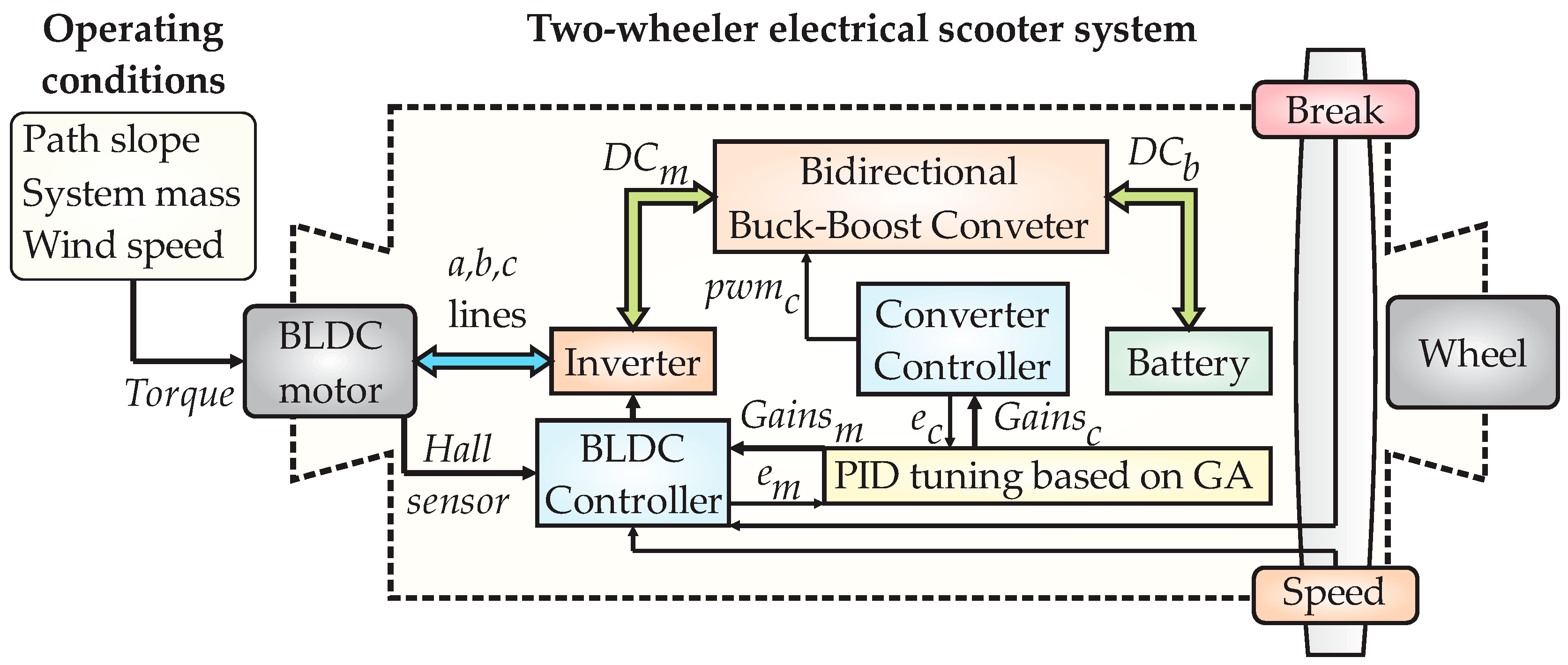
2.1. Two-Wheeler Electrical Scooter Model
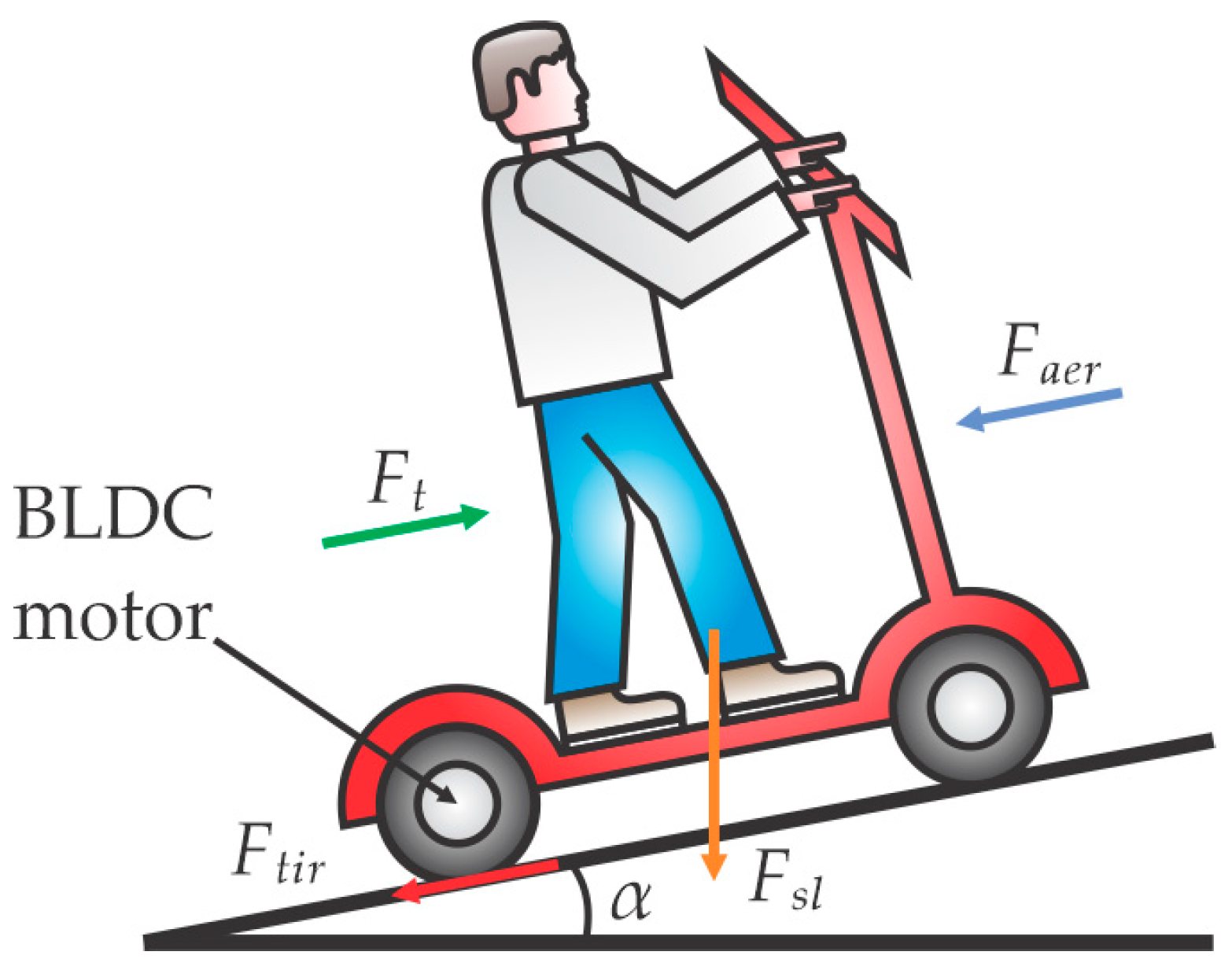
2.2. System Dynamics Modeling
2.3. Operating Conditions Modeling
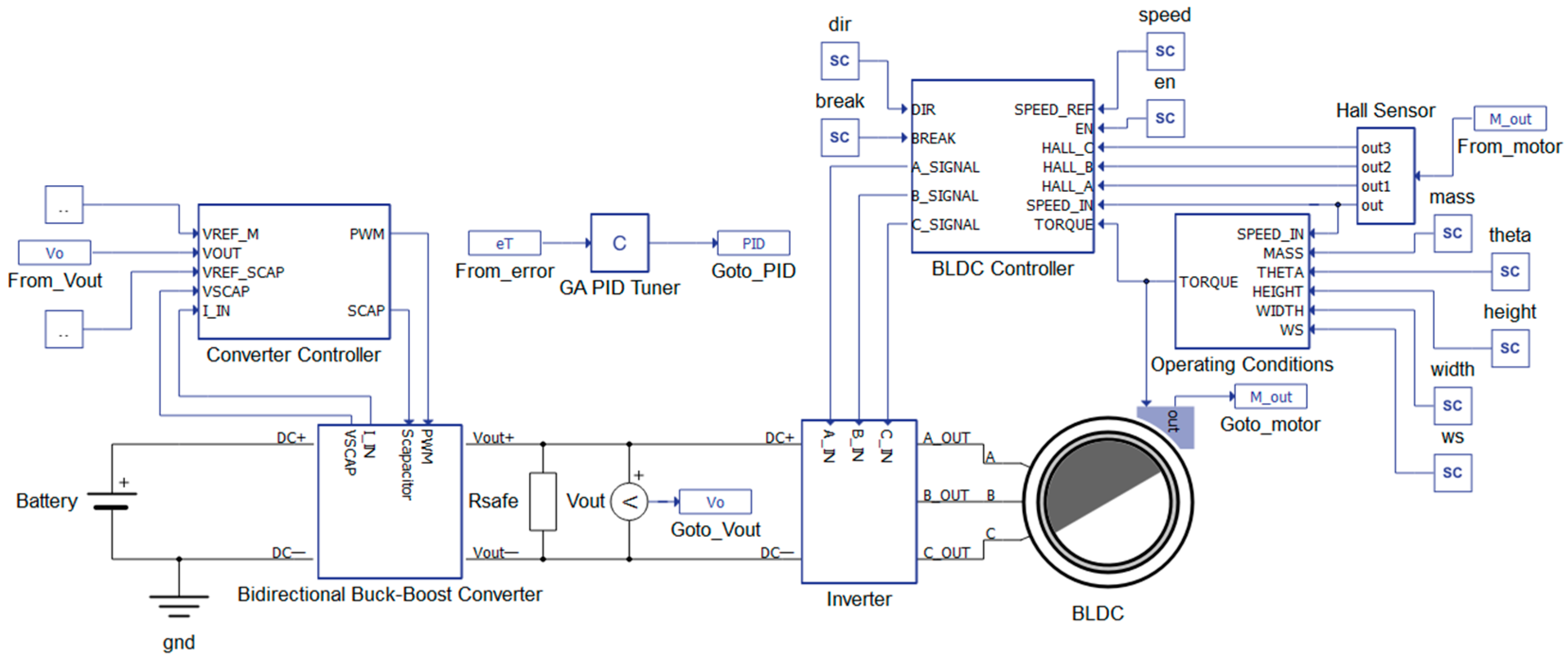
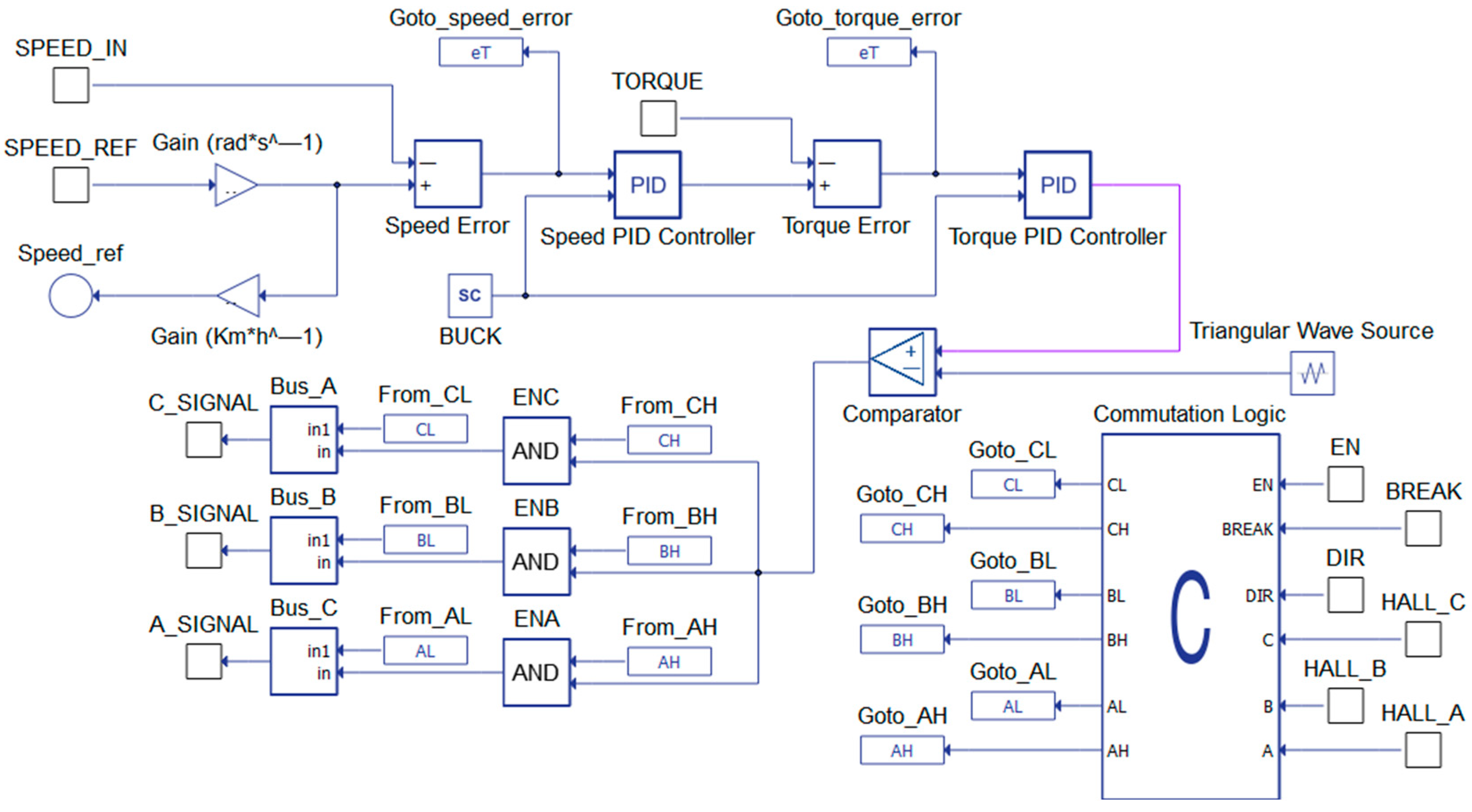
2.4. Hardware-in-the-Loop Proposed Structure
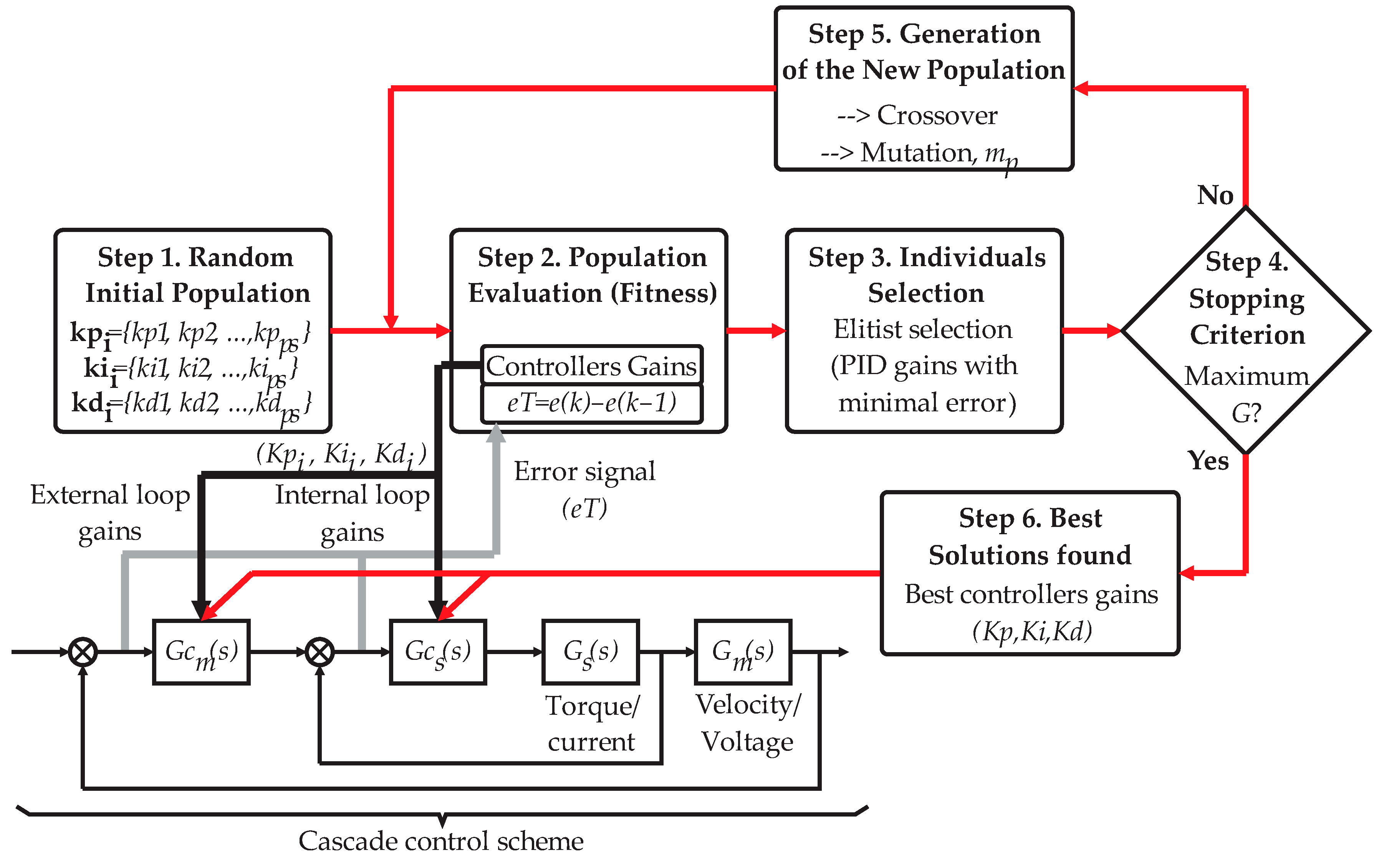
- Step 1: Randomly generate an initial population. Every individual represents the three gains of a PID regulator (Proportional , Integral , and Derivative ). Where = 1, 2, 3, …, and is the i-th gain of an individual from a total of individuals in the population. The length of the string representation per individual is , each gain’s string length is specified in a fixed-point format, the searching ranges of the gains are given according to the fixed-point format, and initial values (seed values) are given through the tuning rules of Ziegler–Nichols (ZN), see Table 2. Thus, the random population is generated around the seed values.
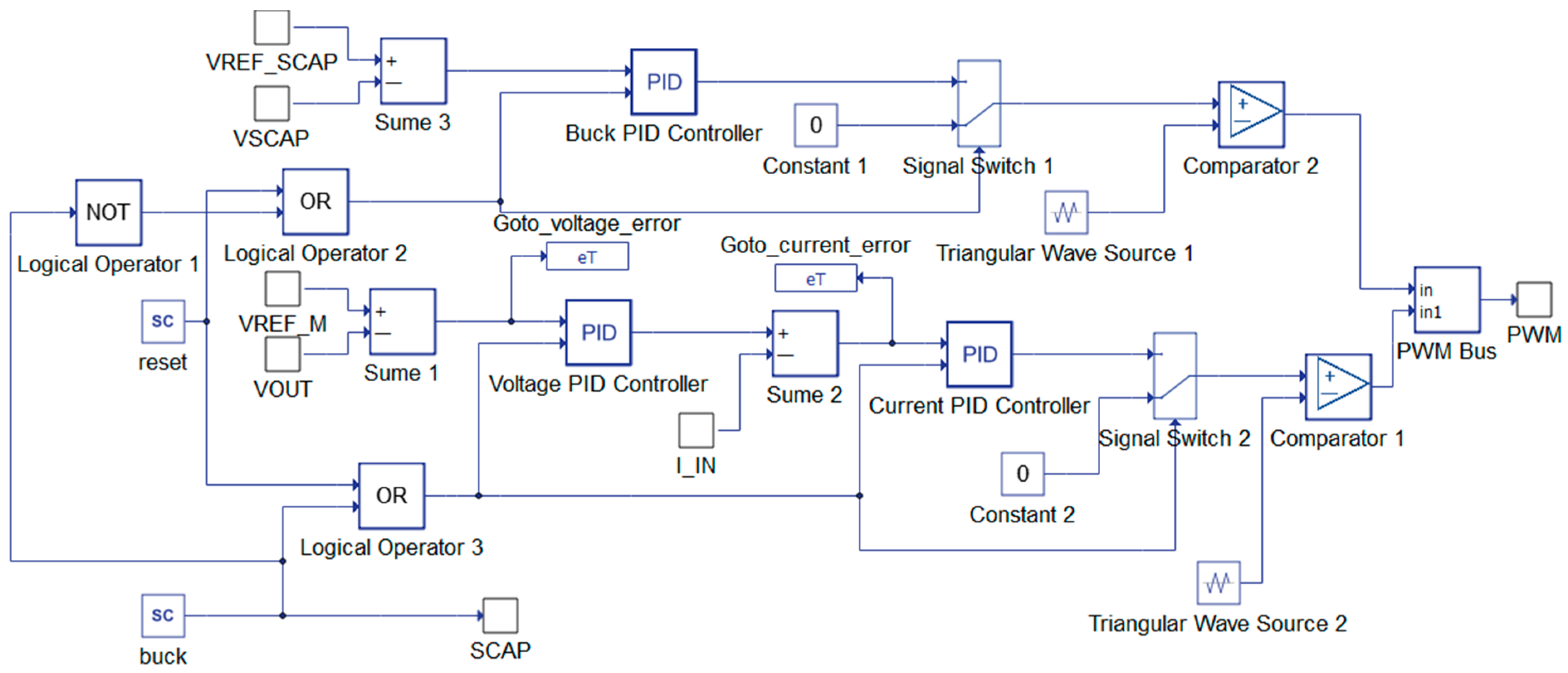
- Step 2: Evaluate the population’s fitness. The gains of every individual in the population are set on the PIDs of the corresponding cascade control scheme (Torque–Velocity or Voltage–Current), and their response performances are analyzed. For example, the error signals generated in the cascade scheme are stored in the global variable , which are the feedback to this sub block, and they are used in the objective function trying to minimize the error with respect to its previous value . From the cascade control scheme of Figure 7, represents the secondary process with the fast variable (Torque/Current); represents the main process with the slow variable (Velocity/Voltage); and and are the corresponding PID controller algorithms.
- Step 3: Perform the selection of individuals according to their fitness values, which means that the individuals (controller gains) with the best performances will be sorted in descending order. The controller gains in upper positions are selected (elitist selection).
- Step 4: Evaluate the stopping criterion. It is based on the maximum number of generations . If satisfied, then go to Step 6; if not, then go to Step 5.
- Step 5: Generate a new population. The initial population will be substituted by a new population created through the genetic operator’s crossover and mutation. The crossover operation is performed considering one crossover point. By its part, the mutation is applied considering one mutation bit having the mutation probability , with the purpose of avoiding losing essential genetic information. Then, go to Step 2.
- Step 6: The best solutions found are set as the gains of the controllers and in the cascade scheme.
3. Results and Discussion
3.1. Experimental Setup
3.2. Results Obtained for the CE1
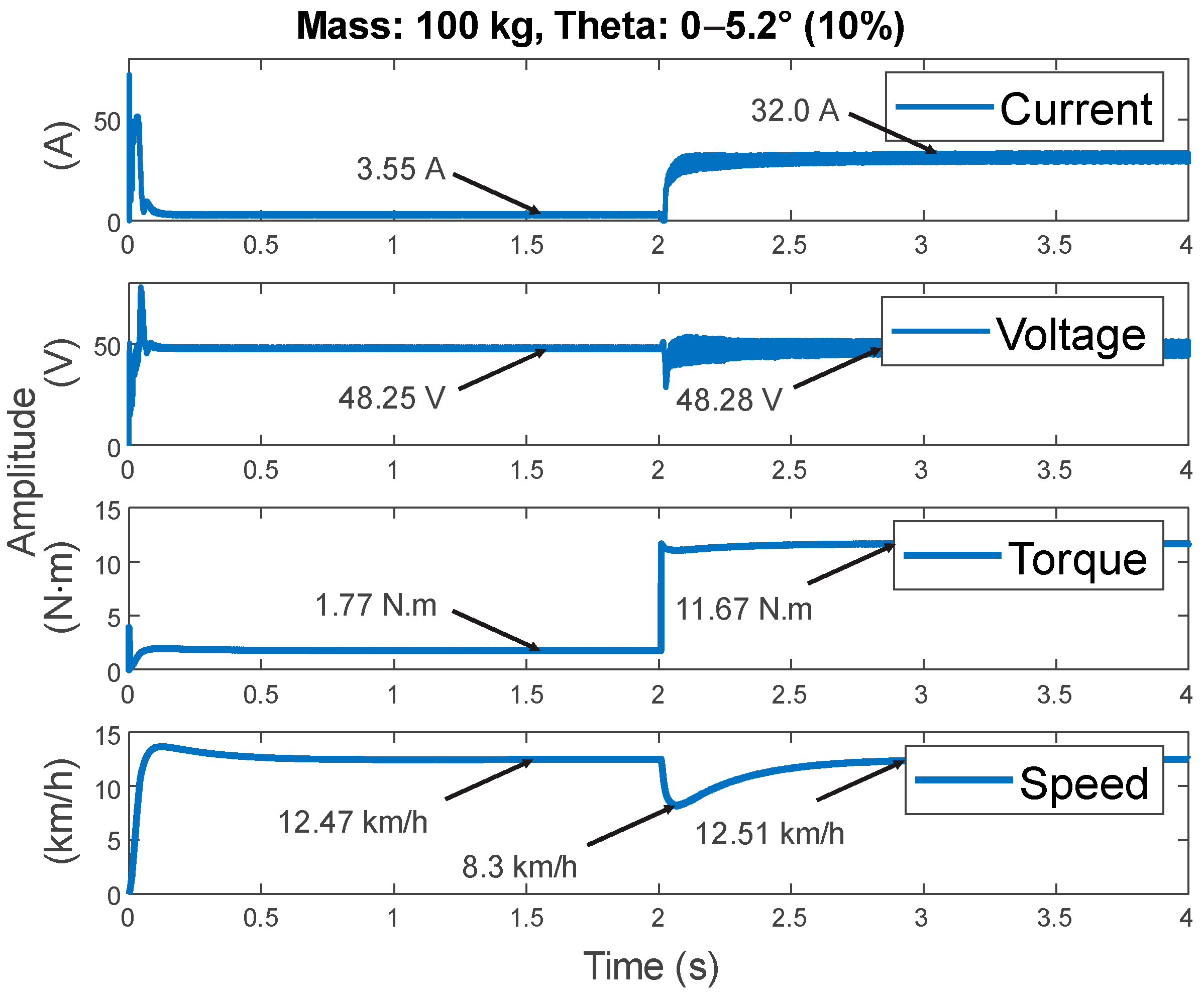
3.3. Results Obtained for the CE2
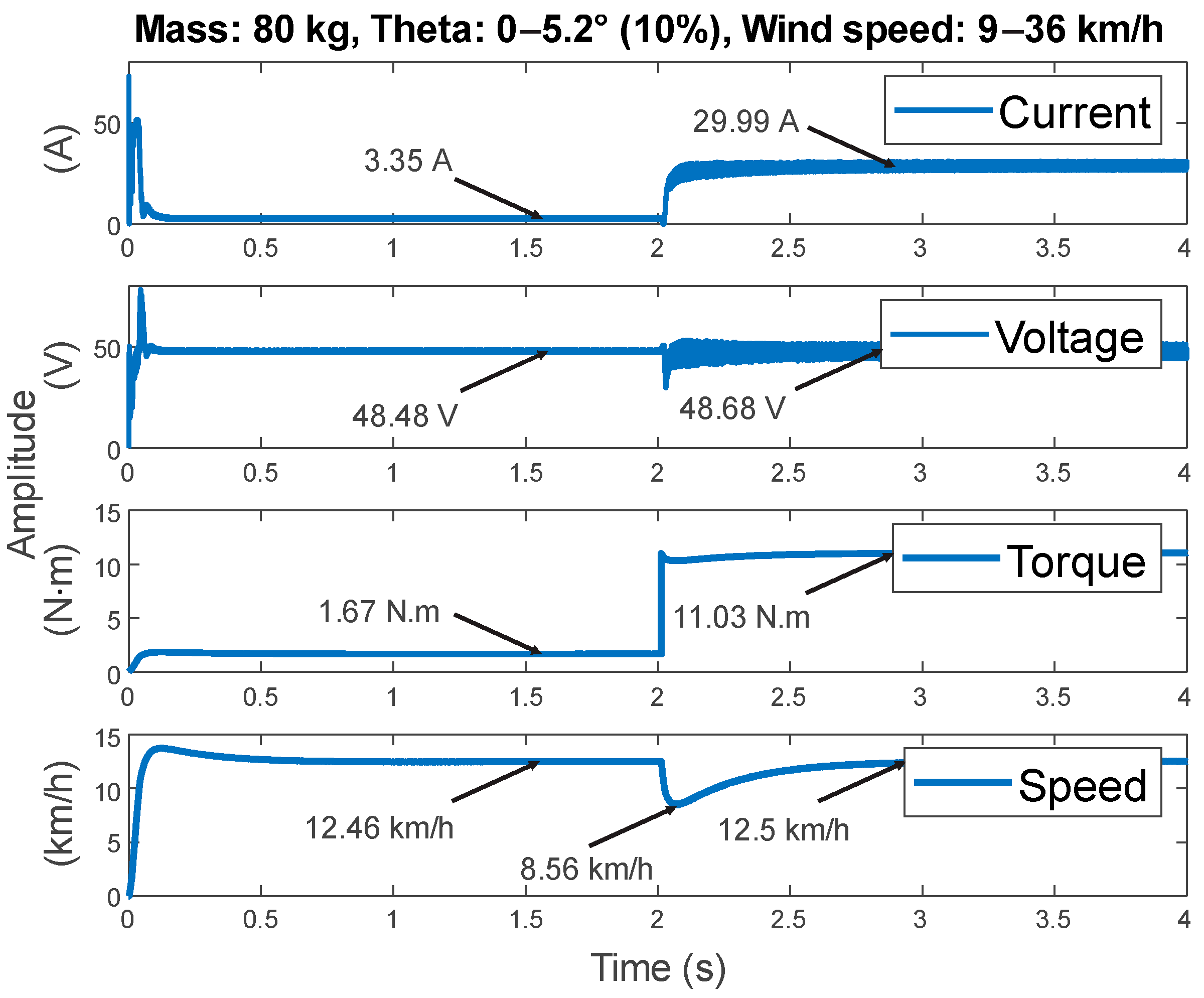
3.4. Results Obtained for the CE3
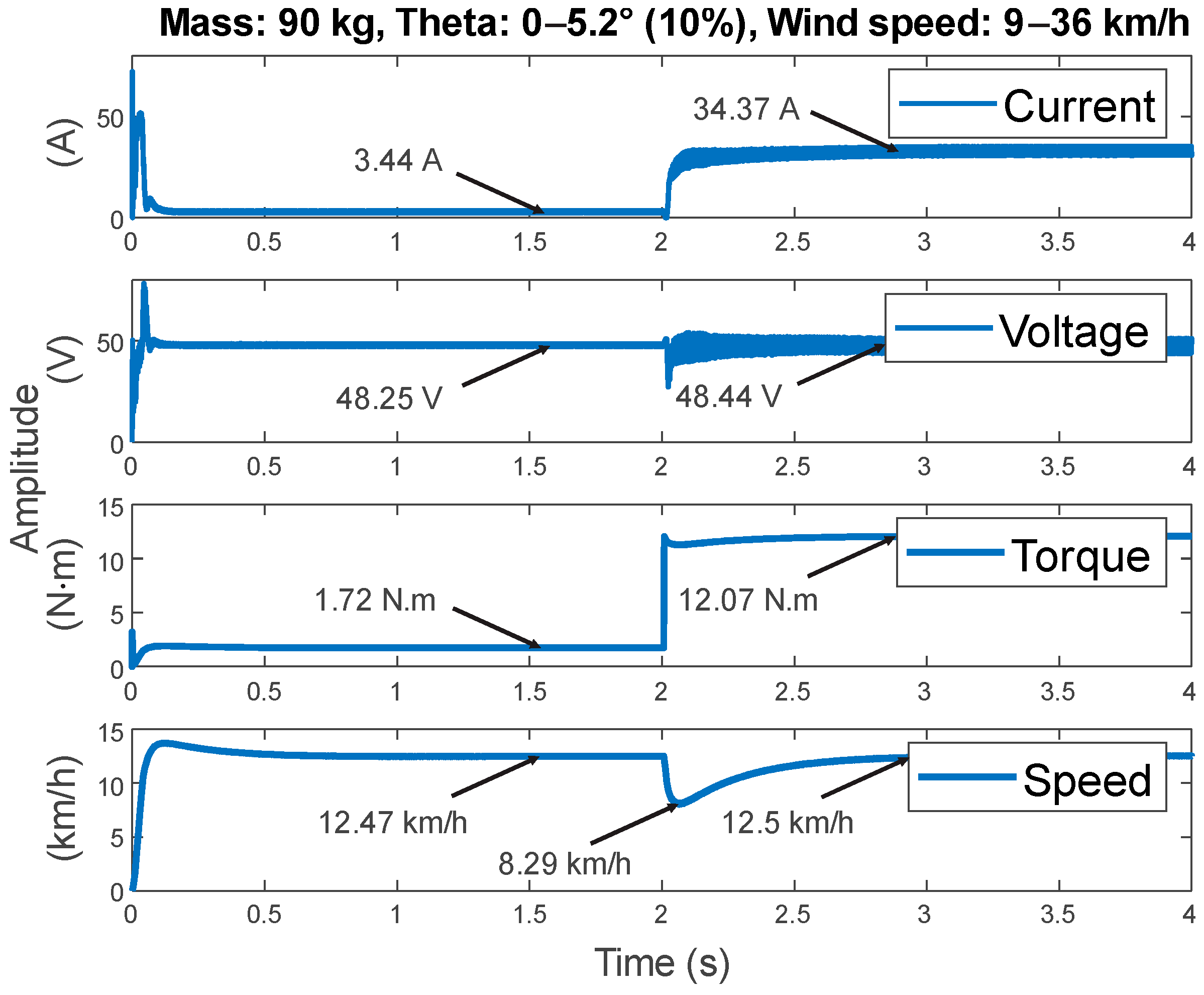
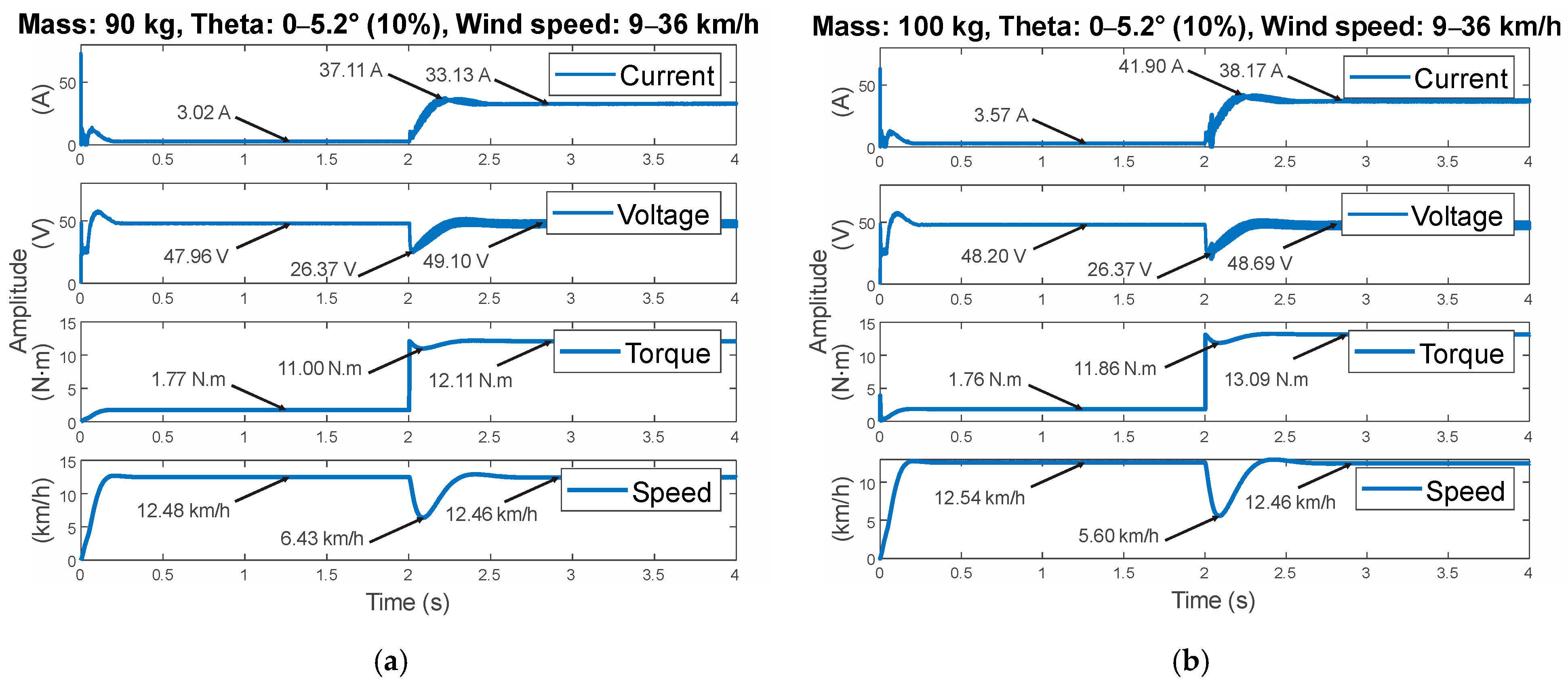
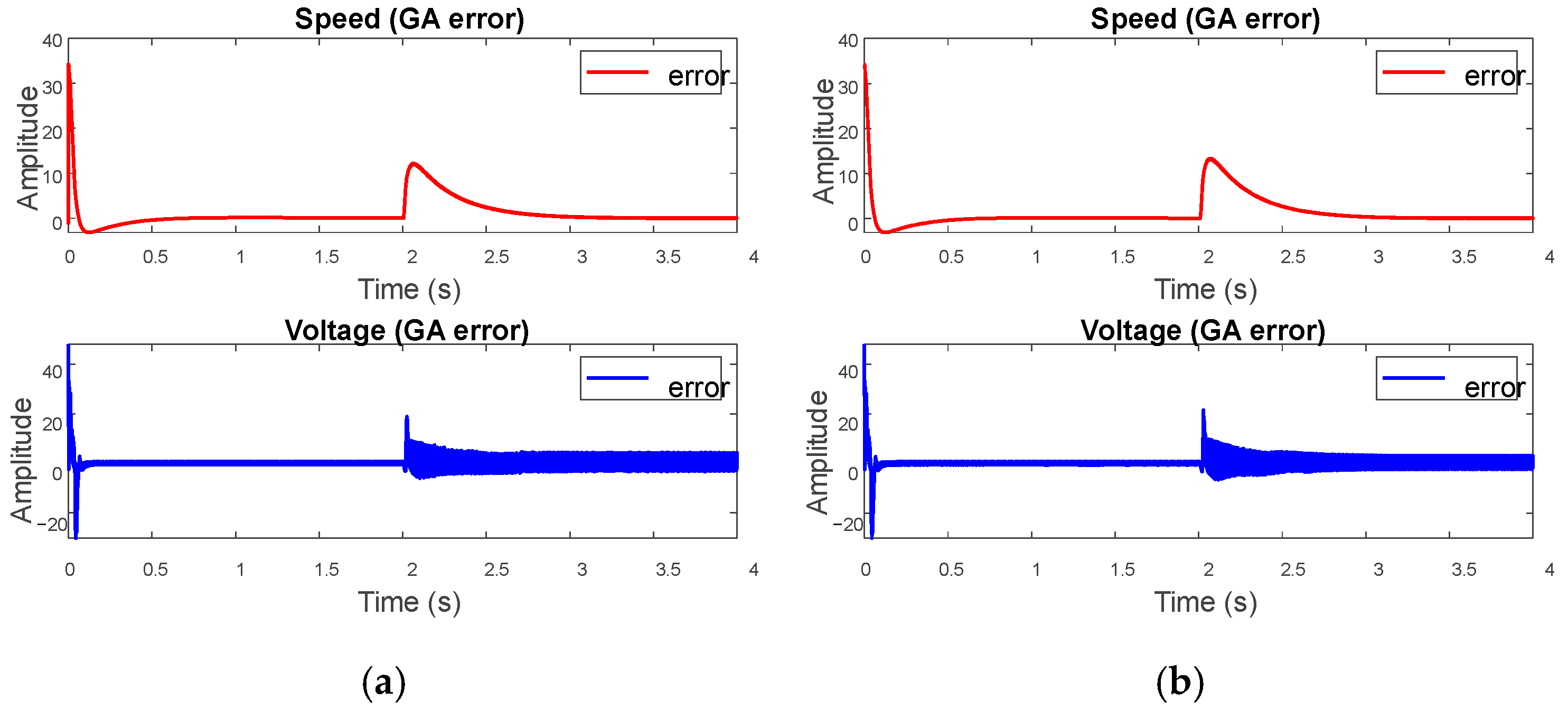
3.5. Results Obtained for the CE4
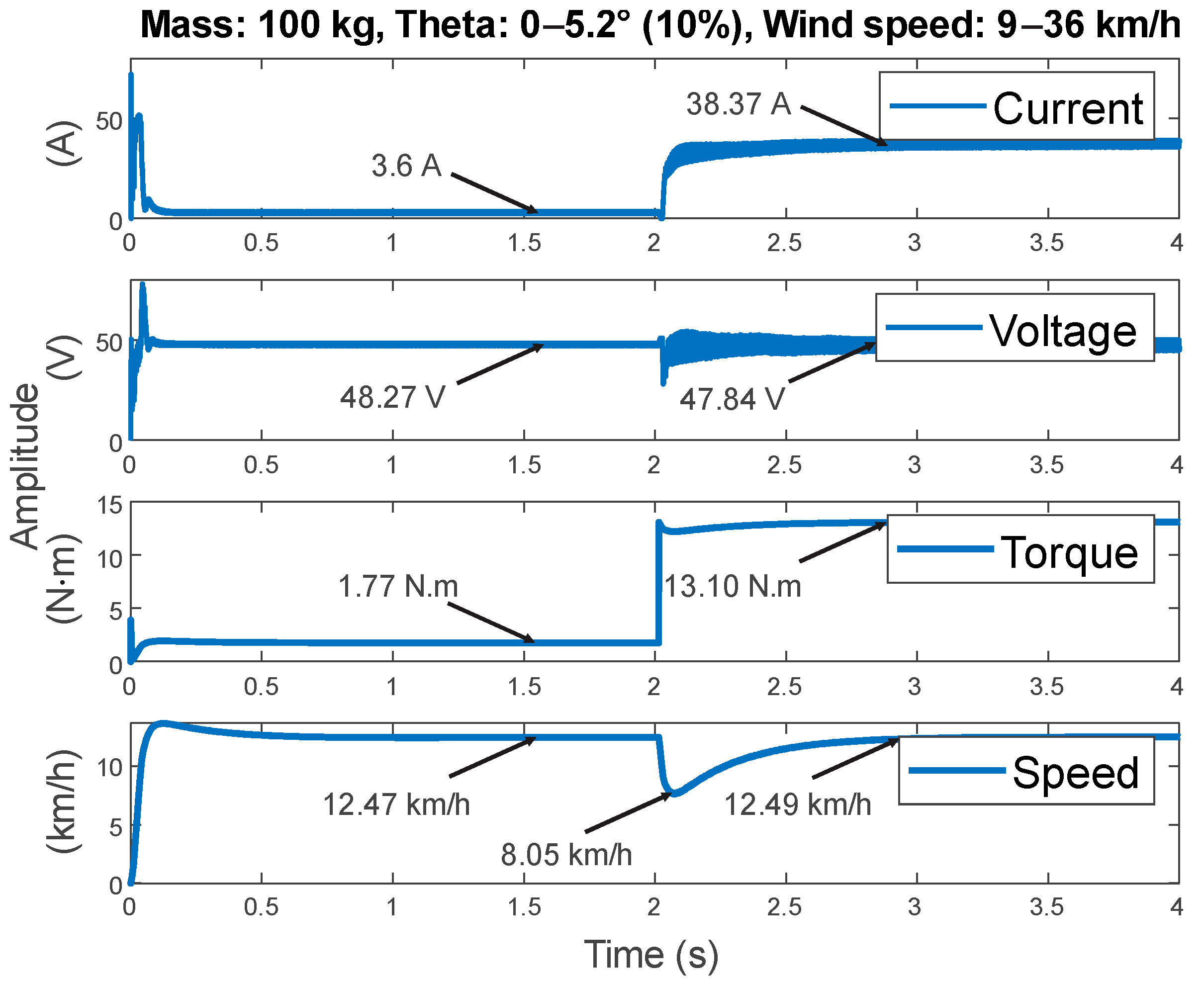
3.6. Results Obtained for the CE5
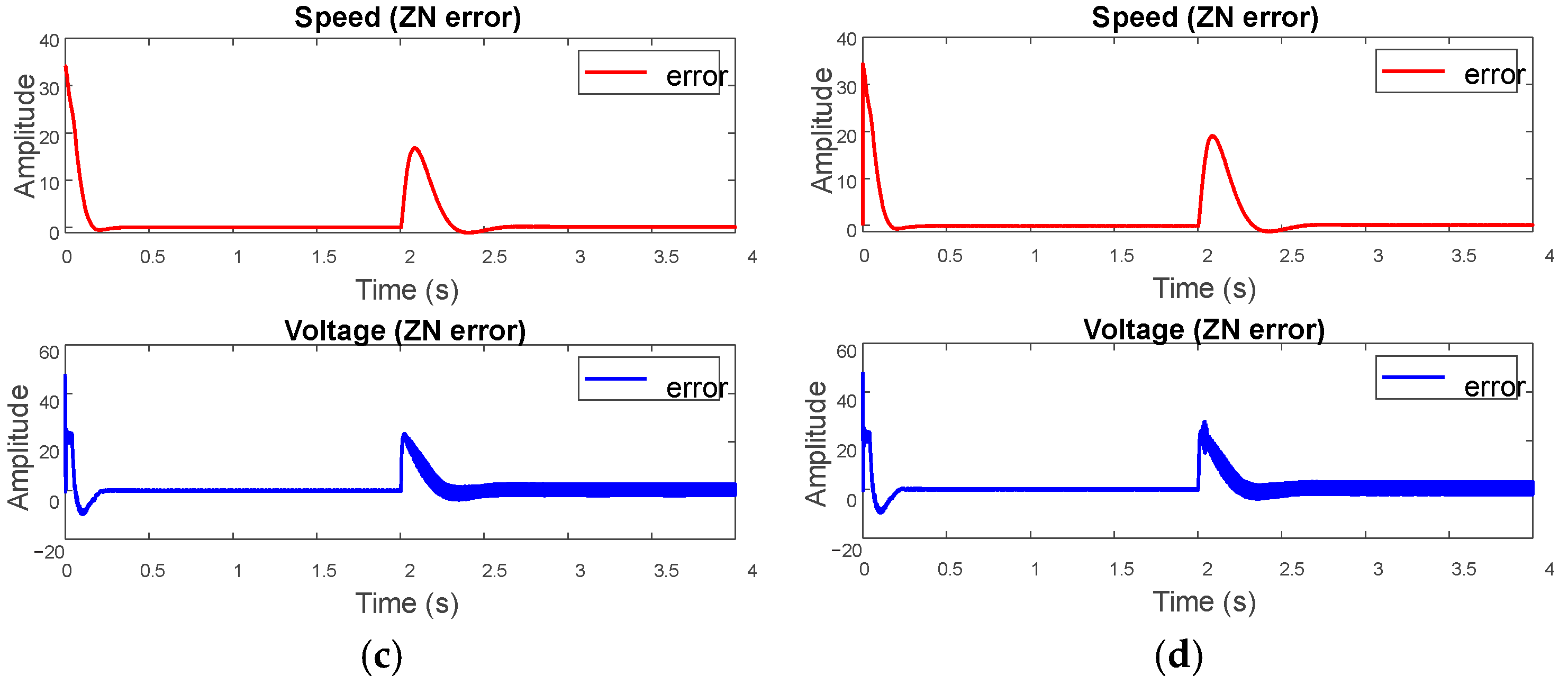
3.7. Comparison with a Classical PID Control Tuned through ZN, CE4, and CE5
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Coretti Sanchez, N.; Martinez, I.; Alonso Pastor, L.; Larson, K. On the Simulation of Shared Autonomous Micro-Mobility. Commun. Transp. Res. 2022, 2, 100065. [Google Scholar] [CrossRef]
- Bharathidasan, M.; Indragandhi, V.; Suresh, V.; Jasiński, M.; Leonowicz, Z. A Review on Electric Vehicle: Technologies, Energy Trading, and Cyber Security. Energy Rep. 2022, 8, 9662–9685. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, D.; Zhang, H.; Liu, Y. Research on the Influence Factors of Brake Regenerative Energy of Pure Electric Vehicles Based on the CLTC. Energy Rep. 2022, 8, 85–93. [Google Scholar] [CrossRef]
- Olabi, A.G.; Wilberforce, T.; Obaideen, K.; Sayed, E.T.; Shehata, N.; Alami, A.H.; Abdelkareem, M.A. Micromobility: Progress, Benefits, Challenges, Policy and Regulations, Energy Sources and Storage, and Its Role in Achieving Sustainable Development Goals. Int. J. 2023, 17, 100292. [Google Scholar] [CrossRef]
- Sandt, L. The Basics of Micromobility and Related Motorized Devices for Personal Transport. Pedestrian and Bicycle Information Center. 2019. Available online: http://pedbikeinfo.org/cms/downloads/PBIC_Brief_MicromobilityTypology.pdf (accessed on 1 May 2023).
- Comi, A.; Polimeni, A.; Nuzzolo, A. An Innovative Methodology for Micro-Mobility Network Planning. Transp. Res. Procedia 2022, 60, 20–27. [Google Scholar] [CrossRef]
- Samadzad, M.; Nosratzadeh, H.; Karami, H.; Karami, A. What Are the Factors Affecting the Adoption and Use of Electric Scooter Sharing Systems from the End User’s Perspective? Transp. Policy 2023, 136, 70–82. [Google Scholar] [CrossRef]
- Indragandhi, V.; Subramaniyaswamy, V.; Selvamathi, R. Chapter 8—Electric Drives Used in Electric Vehicle Applications. In Electric Motor Drives and Their Applications with Simulation Practices; Indragandhi, V., Subramaniyaswamy, V., Selvamathi, R., Eds.; Academic Press: Cambridge, MA, USA, 2022; pp. 435–479. ISBN 978-0-323-91162-7. [Google Scholar]
- Lee, K.-J.; Yun, C.H.; Yun, M.H. Contextual Risk Factors in the Use of Electric Kick Scooters: An Episode Sampling Inquiry. Saf. Sci. 2021, 139, 105233. [Google Scholar] [CrossRef]
- van Boven, J.F.M.; An, P.L.; Kirenga, B.J.; Chavannes, N.H. Electric Scooters: Batteries in the Battle against Ambient Air Pollution? Lancet Planet. Health 2017, 1, e168–e169. [Google Scholar] [CrossRef]
- Chou, J.-R.; Hsiao, S.-W. Product Design and Prototype Making for an Electric Scooter. Mater. Des. 2005, 26, 439–449. [Google Scholar] [CrossRef]
- Falai, A.; Giuliacci, T.A.; Misul, D.; Paolieri, G.; Anselma, P.G. Modeling and On-Road Testing of an Electric Two-Wheeler towards Range Prediction and BMS Integration. Energies 2022, 15, 2431. [Google Scholar] [CrossRef]
- Magibalan, S.; Ragu, C.; Nithish, D.; Raveeshankar, C.; Sabarish, V. Design and Fabrication of Electric Three-Wheeled Scooter for Disabled Persons. Mater. Today Proc. 2023, 74, 820–823. [Google Scholar] [CrossRef]
- Yu, M.; Xiao, C.; Wang, H.; Jiang, W.; Zhu, R. Adaptive Cuckoo Search-Extreme Learning Machine Based Prognosis for Electric Scooter System under Intermittent Fault. Actuators 2021, 10, 283. [Google Scholar] [CrossRef]
- Kalyankar-Narwade, S.; Chidambaram, R.K.; Patil, S. Neural Network- and Fuzzy Control-Based Energy Optimization for the Switching in Parallel Hybrid Two-Wheeler. World Electr. Veh. J. 2021, 12, 35. [Google Scholar] [CrossRef]
- Sandesh, B.B.; Jogi, A.; Pitchaimani, J.; Gangadharan, K.V. Design and Optimization of an External-Rotor Switched Reluctance Motor for an Electric Scooter. Mater. Today Proc. 2023, 1–6. [Google Scholar] [CrossRef]
- Burbank, J.L.; Kasch, W.; Ward, J. Hardware-in-the-Loop Simulations. In An Introduction to Network Modeling and Simulation for the Practicing Engineer; Wiley-IEEE Press: Cambridge, MA, USA, 2011; pp. 114–142. ISBN 978-1-118-06365-1. [Google Scholar]
- Lee, J.S.; Choi, G. Modeling and Hardware-in-the-Loop System Realization of Electric Machine Drives—A Review. CES Trans. Electr. Mach. Syst. 2021, 5, 194–201. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Malinowski, M.; Al-Haddad, K. Hardware-in-the-Loop Systems with Power Electronics: A Powerful Simulation Tool. In Power Electronics for Renewable Energy Systems, Transportation and Industrial Applications; Wiley-IEEE Press: Manhattan, NY, USA, 2014; pp. 573–590. ISBN 978-1-118-75552-5. [Google Scholar]
- Sparn, B.; Krishnamurthy, D.; Pratt, A.; Ruth, M.; Wu, H. Hardware-in-the-Loop (HIL) Simulations for Smart Grid Impact Studies. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Tsampardoukas, G.; Mouzakitis, A. Hardware-in-the-Loop Visual Display Validation Utilising Vision System. In Proceedings of the UKACC International Conference on Control 2010, Coventry, UK, 7–10 September 2010; pp. 1–5. [Google Scholar]
- Joshi, A. Automotive Applications of Hardware-in-the-Loop (HIL) Simulation. In Automotive Applications of Hardware-in-the-Loop (HIL) Simulation; SAE: Warrendale, PA, USA, 2020; pp. i–xxvii. ISBN 978-1-4686-0007-0. [Google Scholar]
- Essa, M.E.-S.M.; Lotfy, J.V.W.; Abd-Elwahed, M.E.K.; Rabie, K.; ElHalawany, B.M.; Elsisi, M. Low-Cost Hardware in the Loop for Intelligent Neural Predictive Control of Hybrid Electric Vehicle. Electronics 2023, 12, 971. [Google Scholar] [CrossRef]
- Gros, I.-C.; Fodorean, D.; Marginean, I.-C. FPGA Real-Time Implementation of a Vector Control Scheme for a PMSM Used to Propel an Electric Scooter. In Proceedings of the 2017 5th International Symposium on Electrical and Electronics Engineering (ISEEE), Galati, Romania, 20–22 October 2017; pp. 1–5. [Google Scholar]
- Wu, C.-H.; Hung, Y.-H.; Chen, S.-Y. Rapid-Prototyping Designs for the Three-Power-Source Hybrid Electric Scooter with a Fuzzy-Control Energy Management. In Proceedings of the 2016 International Conference on Applied System Innovation (ICASI), Okinawa, Japan, 26–30 May 2016; pp. 1–4. [Google Scholar]
- Mohanraj, D.; Aruldavid, R.; Verma, R.; Sathiyasekar, K.; Barnawi, A.B.; Chokkalingam, B.; Mihet-Popa, L. A Review of BLDC Motor: State of Art, Advanced Control Techniques, and Applications. IEEE Access 2022, 10, 54833–54869. [Google Scholar] [CrossRef]
- Riyadi, S.; Dwi Setianto, Y.B. Analysis and Design of BLDC Motor Control in Regenerative Braking. In Proceedings of the 2019 International Symposium on Electrical and Electronics Engineering (ISEE), Ho Chi Minh City, Vietnam, 10–12 October 2019; pp. 211–215. [Google Scholar]
- Mamadapur, A.; Unde Mahadev, G. Speed Control of BLDC Motor Using Neural Network Controller and PID Controller. In Proceedings of the 2019 2nd International Conference on Power and Embedded Drive Control (ICPEDC), Chennai, India, 21–23 August 2019; pp. 146–151. [Google Scholar]
- Ibrahim, M.A.; Mahmood, A.K.; Sultan, N.S. Optimal PID Controller of a Brushless Dc Motor Using Genetic Algorithm. Int. J. Power Electron. Drive Syst. IJPEDS 2019, 10, 822–830. [Google Scholar] [CrossRef] [Green Version]
- Hicham, C.; Nasri, A.; Kayisli, K. A Novel Method of Electric Scooter Torque Estimation Using the Space Vector Modulation Control. Int. J. Renew. Energy Dev. 2021, 10, 355–364. [Google Scholar] [CrossRef]
- Jorge, I.; Mesbahi, T.; Paul, T.; Samet, A. Study and Simulation of an Electric Scooter Based on a Dynamic Modelling Approach. In Proceedings of the 2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 September 2020; pp. 1–6. [Google Scholar]
- Kumar, K.V.; Voora, S.; Raghavender, A.T. Genetic Algorithm and Its Applications to Mechanical Engineering: A Review. Mater. Today Proc. 2015, 2, 2624–2630. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Voltage, | 48 | |
| Power | 350 | |
| Back-electromotive force constant, | 17.1 | |
| Resistance, | 387.1205 | |
| Inductance, | 0.8646 | |
| Poles number | 15 | - |
| Slots number | 27 | - |
| Moment of Inertia, | 18.8776 | |
| Friction constant, | 0.028 |
| Parameter | Value | |||||||
|---|---|---|---|---|---|---|---|---|
| Generations number, | 100 | |||||||
| Population size, | 20 | |||||||
| Mutation probability, | 0.1 (10%) | |||||||
| Total string length, | 64 bits | |||||||
| Crossover operation | 1 point | |||||||
| Mutation operation | 1 bit | |||||||
| Controller Gains Searching Range | ||||||||
| Gain | Torque | Velocity | Voltage | Current | ||||
| Format/Range | Initial Value | Format/Range | Initial Value | Format/Range | Initial Value | Format/Range | Initial Value | |
| Kp | 6.14 bits/ [0, 64) | 25.5864 | 6.16 bits/ [0, 64) | 17.4758 | 3.17 bits/ [0, 8) | 0.018 | 6.18 bits/ [0, 64) | 0.018 |
| Ki | 8.16 bits/ [0, 256) | 106.6098 | 6.18 bits/ [0, 64) | 2.6732 | 9.15 bits/ [0, 512) | 12.2158 | 18.6 bits/ [0, 262,144) | 11.9482 |
| Kd | 1.19 bits/ [0, 2) | 0.0023 | 1.17 bits/ [0, 2) | 0.0100496 | 1.19 bits/ [0, 2) | 6.6307 × 10−6 | 1.15 bits/ [0, 2) | 6.7792 × 10−6 |
| Experimental Trial | Operating Conditions | Time | ||
|---|---|---|---|---|
| System Mass (MASS) | Wind Speed (WS) | |||
| CE1 | 100 kg | 9 km/h | 0° | t < 2 s |
| 36 km/h | ||||
| CE2 | 100 kg | 9 km/h | 0° | t < 2 s |
| 5.2° (10%) | ||||
| CE3 | 80 kg | 9 km/h | 0° | t < 2 s |
| 36 km/h | 5.2° | |||
| CE4 | 90 kg | 9 km/h | 0° | t < 2 s |
| 36 km/h | 5.2° | |||
| CE5 | 100 kg | 9 km/h | 0° | t < 2 s |
| 36 km/h | 5.2° | |||
| Case Study | Mean Square Error (MSE) | |||
|---|---|---|---|---|
| Speed GA | Speed ZN | Voltage GA | Voltage ZN | |
| CE4 | 3.891 | 4.6898 | 2.8113 | 4.2736 |
| CE5 | 3.7741 | 4.9713 | 2.7945 | 4.5747 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moreno-Suarez, L.E.; Morales-Velazquez, L.; Jaen-Cuellar, A.Y.; Osornio-Rios, R.A. Hardware-in-the-Loop Scheme of Linear Controllers Tuned through Genetic Algorithms for BLDC Motor Used in Electric Scooter under Variable Operation Conditions. Machines 2023, 11, 663. https://doi.org/10.3390/machines11060663
Moreno-Suarez LE, Morales-Velazquez L, Jaen-Cuellar AY, Osornio-Rios RA. Hardware-in-the-Loop Scheme of Linear Controllers Tuned through Genetic Algorithms for BLDC Motor Used in Electric Scooter under Variable Operation Conditions. Machines. 2023; 11(6):663. https://doi.org/10.3390/machines11060663
Chicago/Turabian StyleMoreno-Suarez, Leonardo Esteban, Luis Morales-Velazquez, Arturo Yosimar Jaen-Cuellar, and Roque Alfredo Osornio-Rios. 2023. "Hardware-in-the-Loop Scheme of Linear Controllers Tuned through Genetic Algorithms for BLDC Motor Used in Electric Scooter under Variable Operation Conditions" Machines 11, no. 6: 663. https://doi.org/10.3390/machines11060663