
Attitude-Oriented Stability Control with Adaptive Impedance Control for a Wheeled Robotic System on Rough Terrain
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
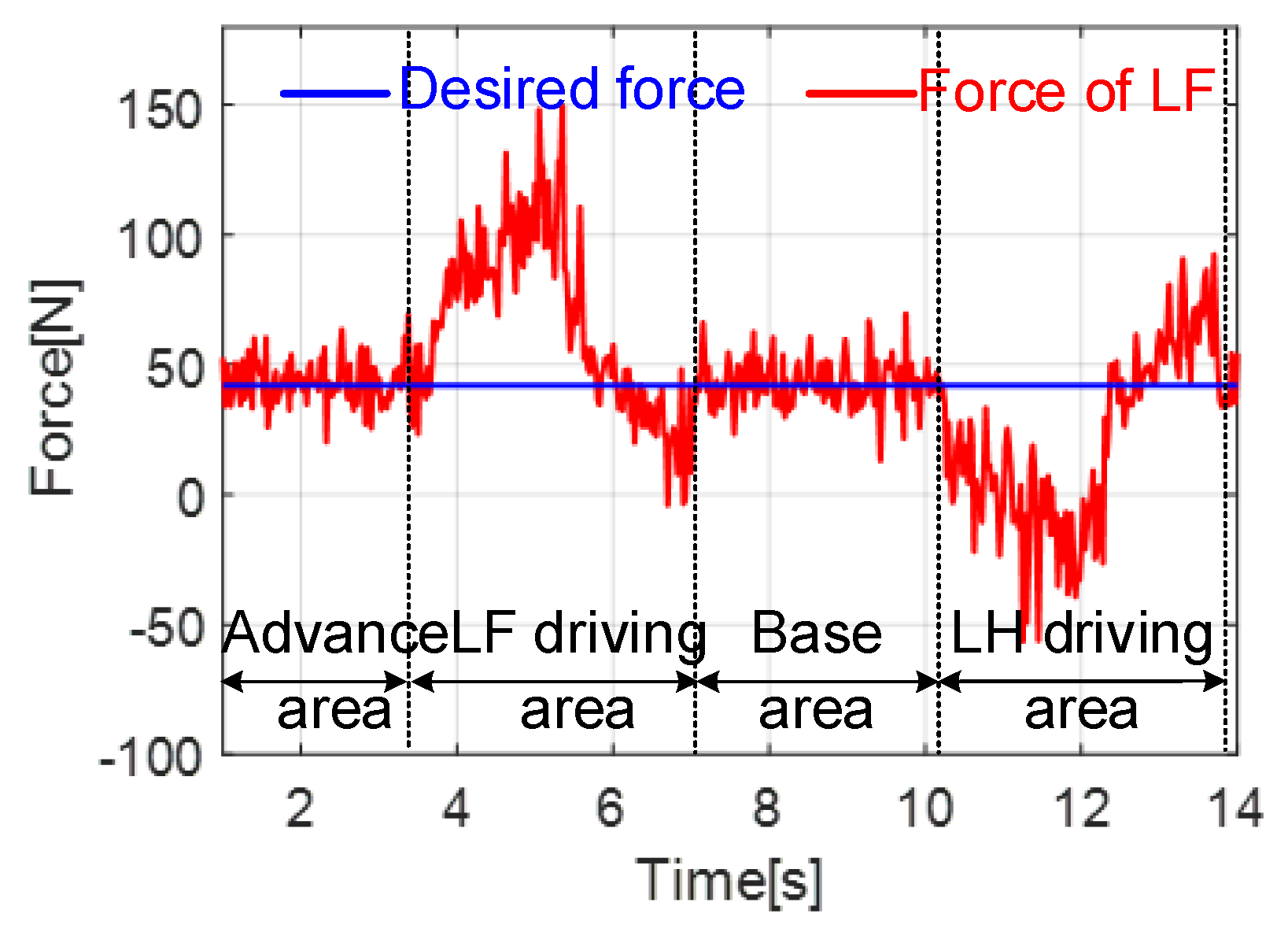
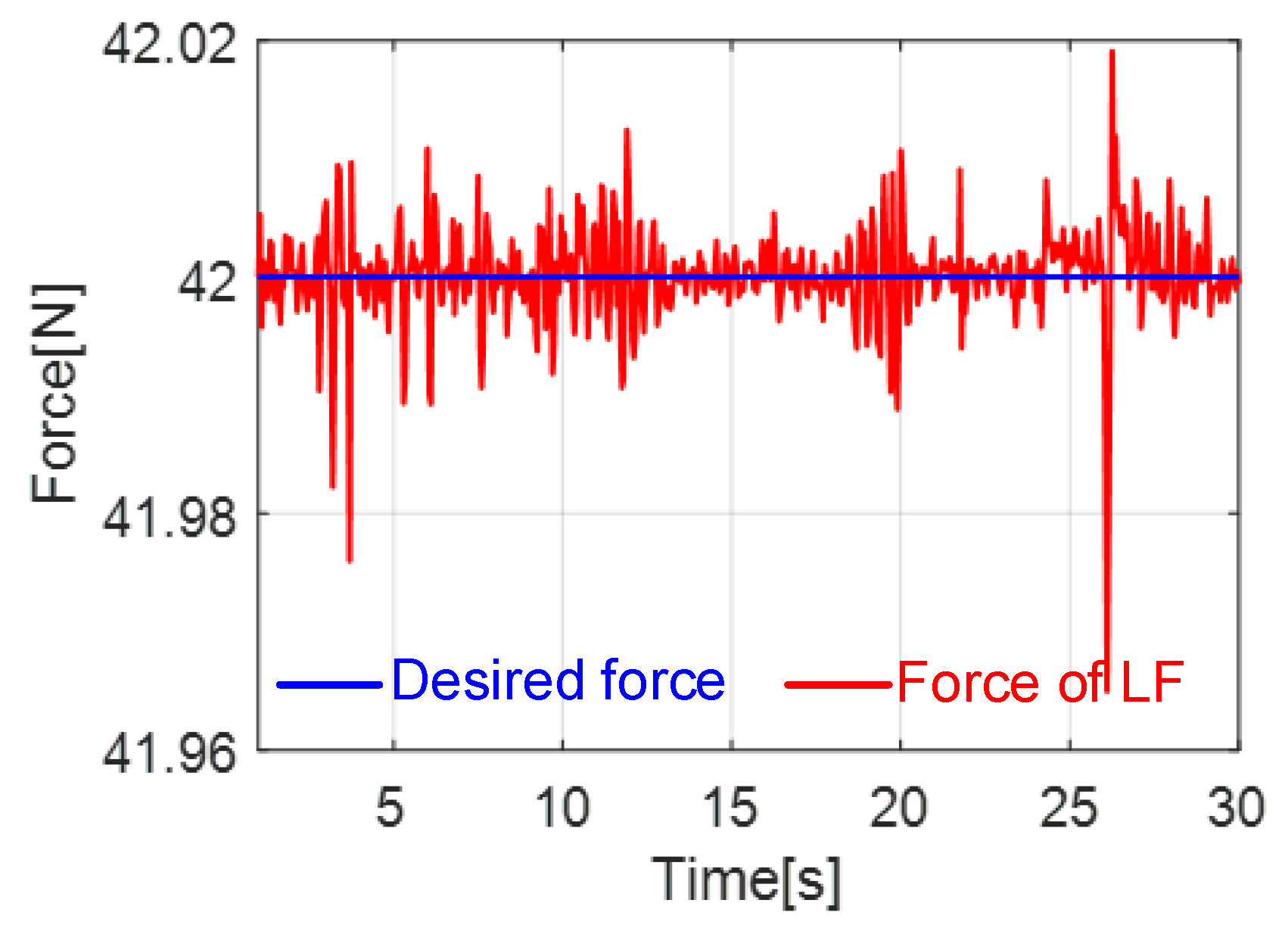
- To minimize the forcetracking error, the AVIC controller is employed to track the desired force of the robot’s base by the proposed adaptive control law to compensate for the uncertainty.
- (2)
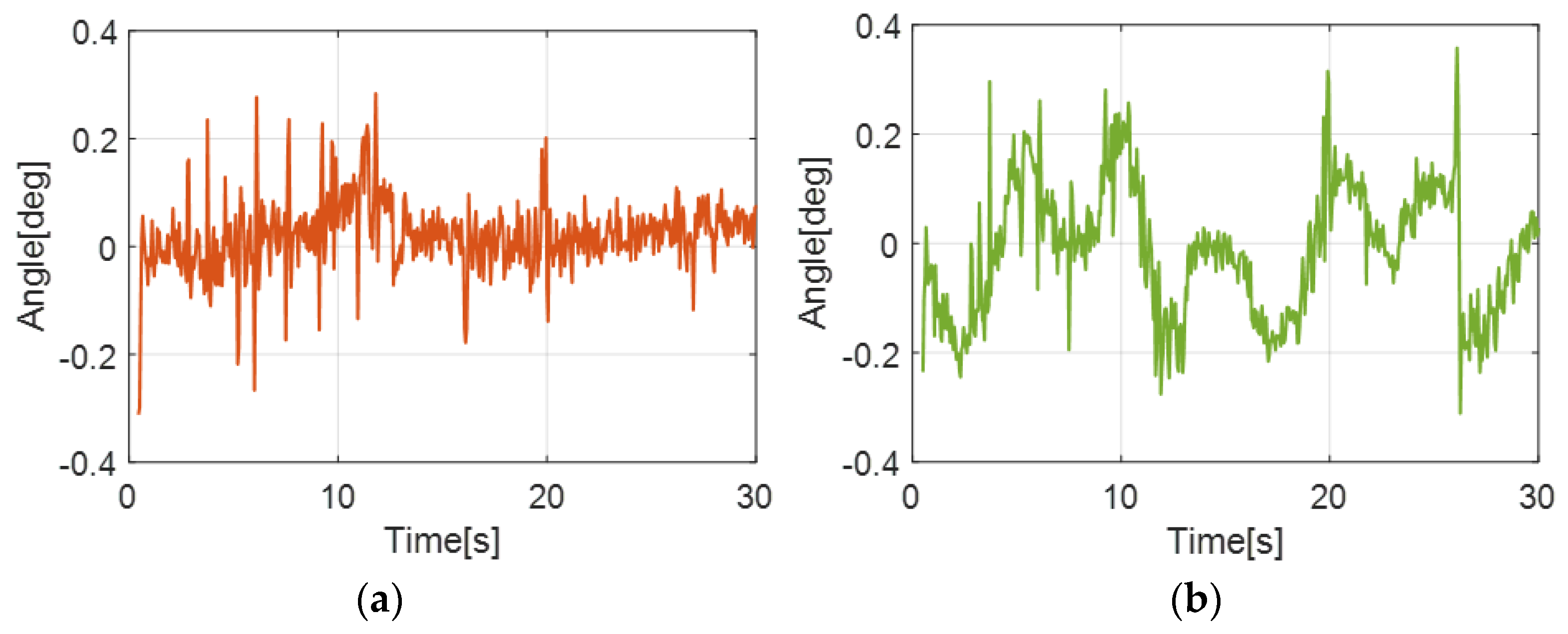
- In addition, the THV controller is devised as a feedforward control to minimize the force-tracking error, as well as maintain the robot’s base horizontal posture, which makes up for the limitation in taking care of the stability and the horizontality.
- (3)
- A series of numerical trails with the proposed control framework are conducted in a novel wheeled robotic system. The effectiveness of the framework is validated and evaluated with the comparative results using the current control methods.
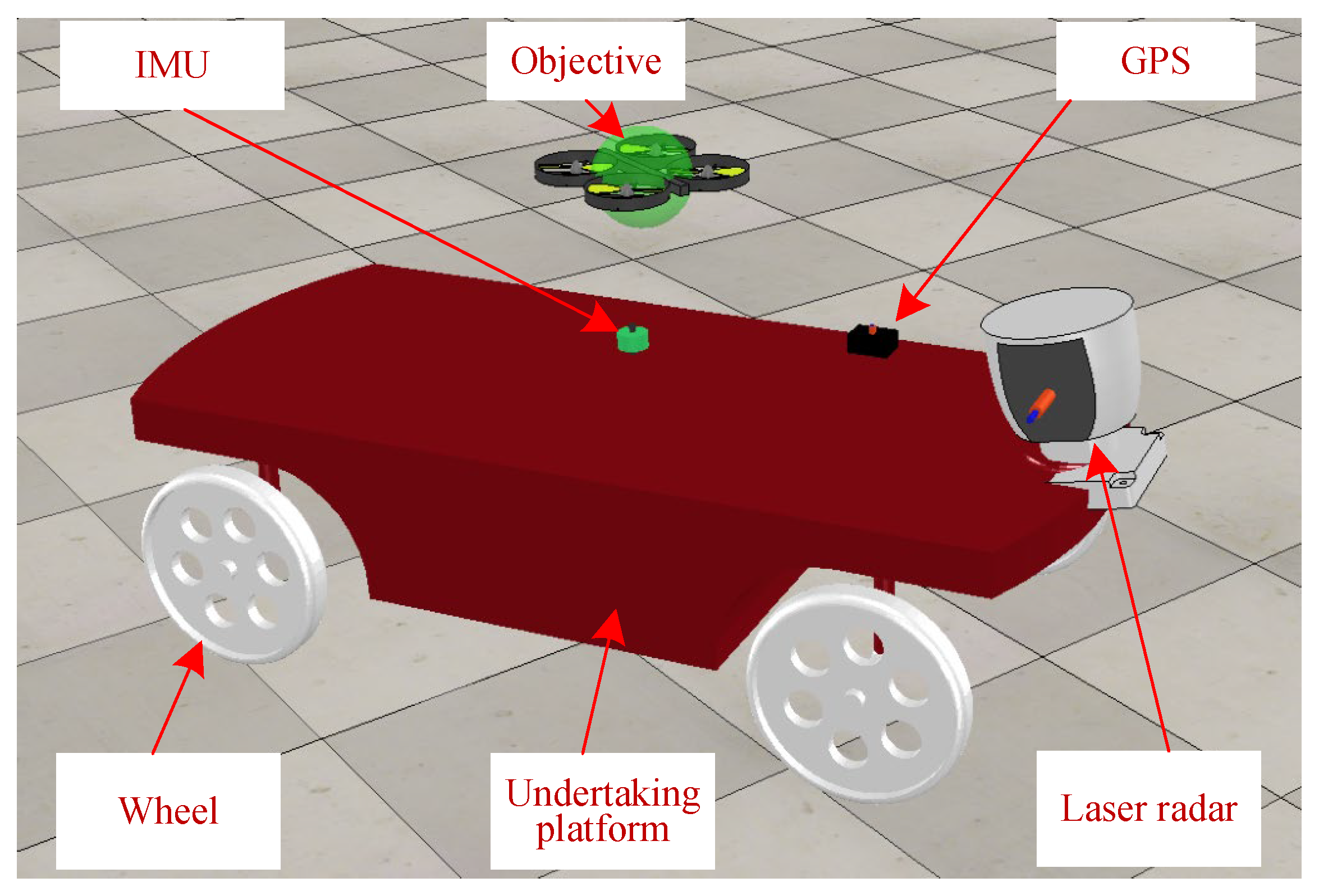
2. System Composition
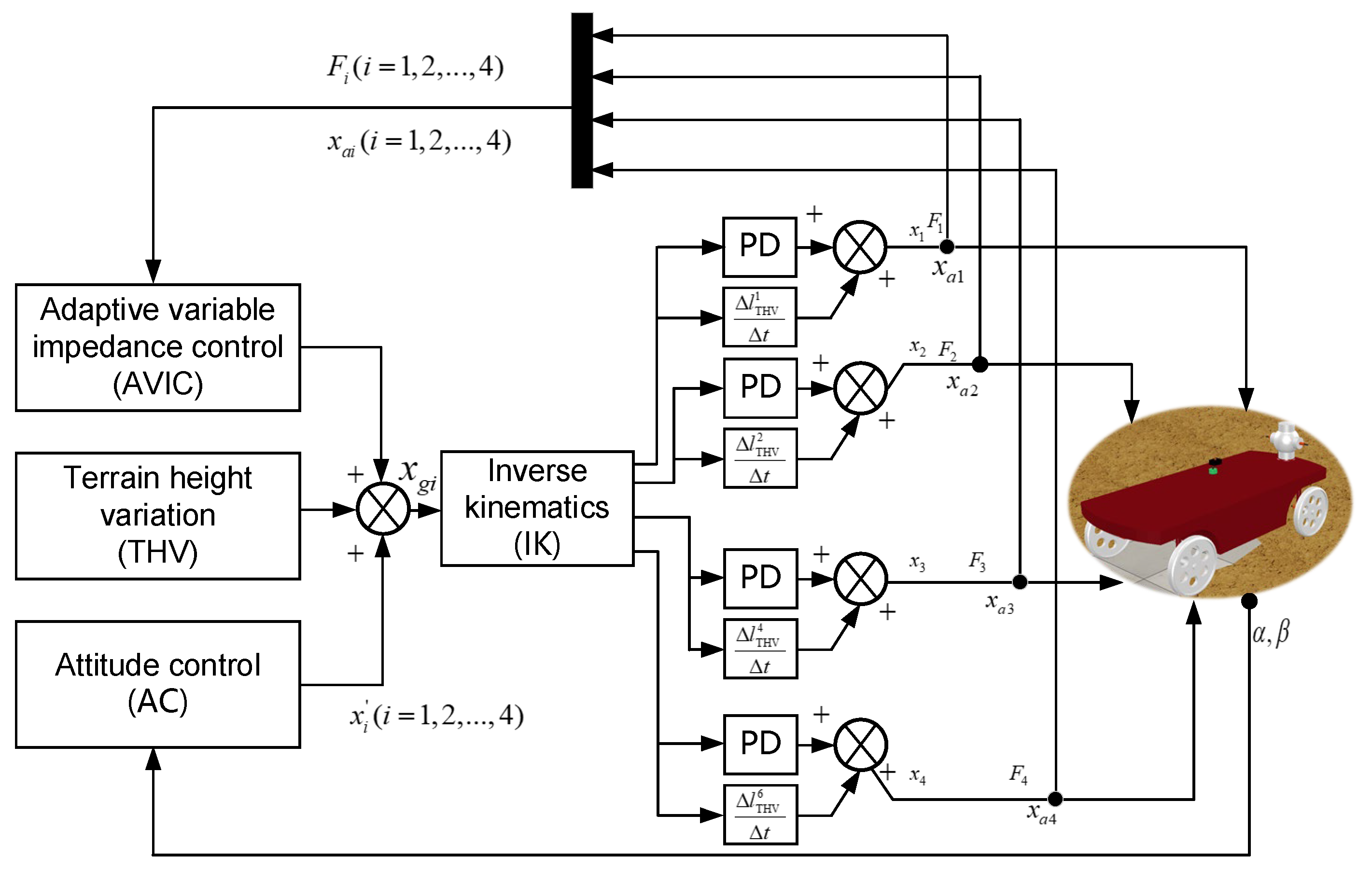
3. Base Stability Control Framework
3.1. Adaptive Force Tracking Control
3.2. Posture-Oriented Control
4. Numerical Trials
4.1. Numerical Setup
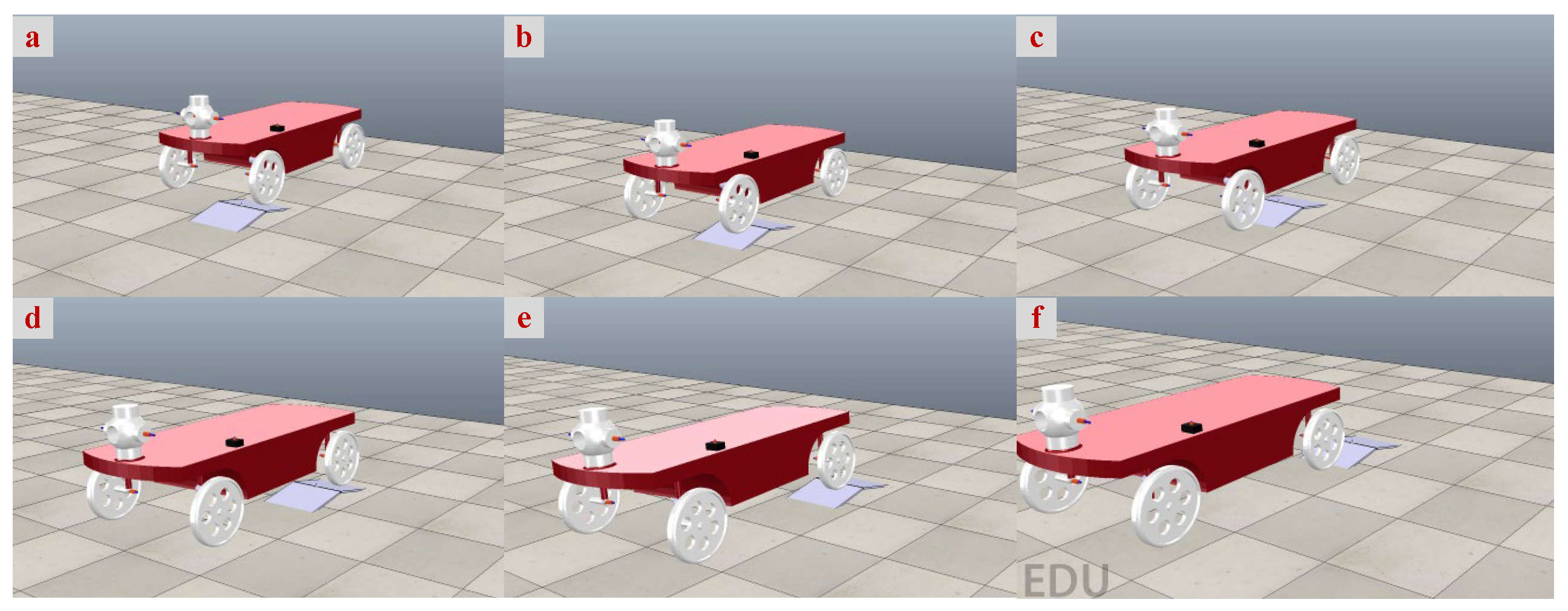
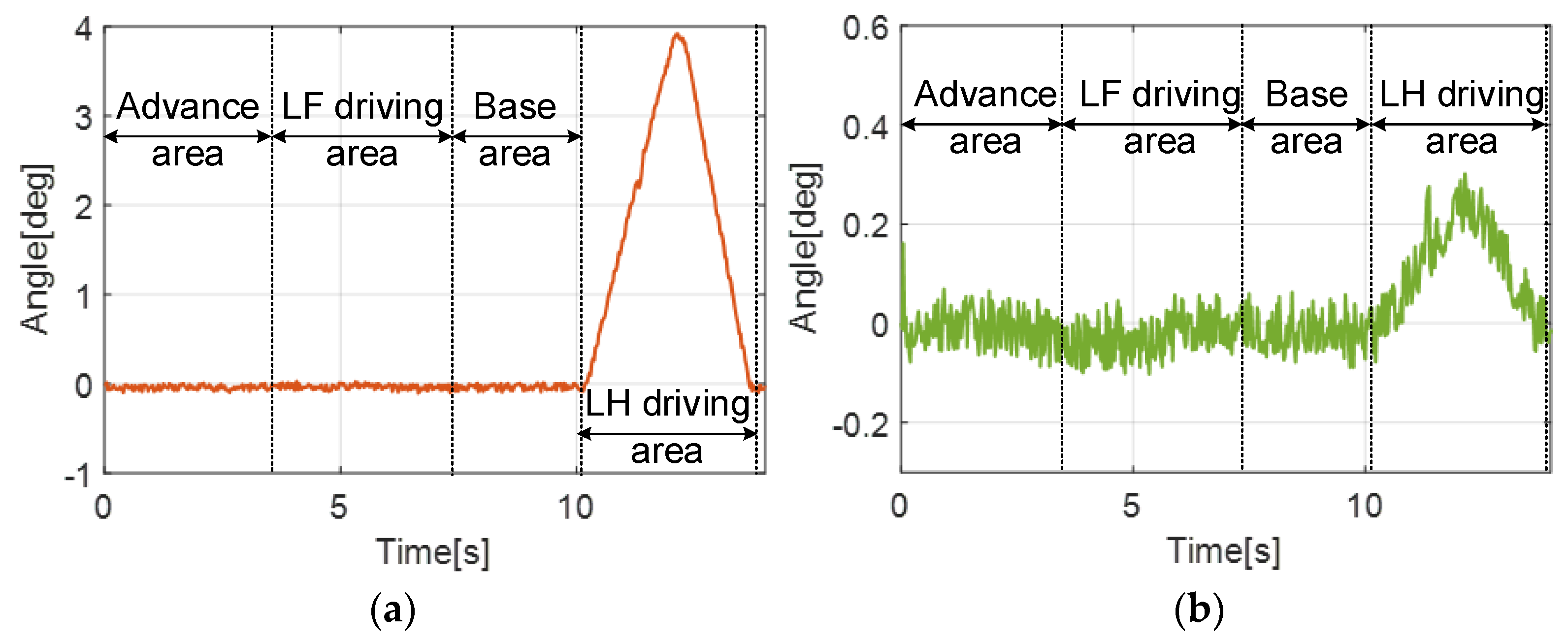
4.2. Variable Terrain of Slopes
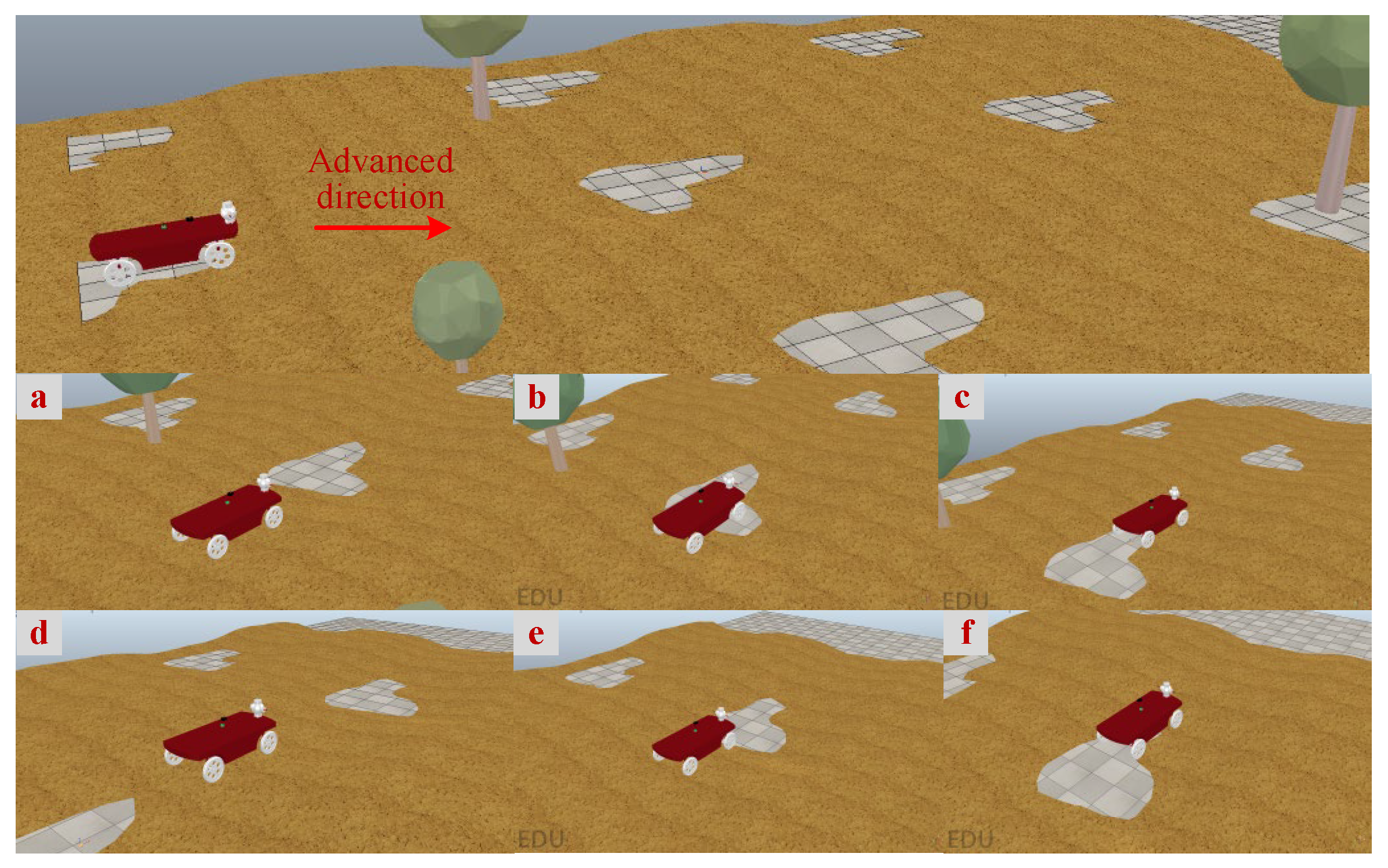
4.3. Reality-Like Terrain
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Behera, P.K.; Gupta, A. Novel design of stair climbing wheelchair. J. Mech. Sci. Technol. 2018, 32, 4903–4908. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.; Lee, D. Mobile robot with passively articulated driving tracks for high terrainability and maneuverability on unstructured rough terrain: Design, analysis, and performance evaluation. J. Mech. Sci. Technol. 2018, 32, 5389–5400. [Google Scholar] [CrossRef]
- Hong, D.K.; Hwang, W.; Lee, J.Y.; Woo, B.C. Design, analysis, and experimental validation of a permanent magnet synchronous motor for articulated robot applications. IEEE Trans. Magn. 2017, 54, 1–4. [Google Scholar] [CrossRef]
- Cui, Y.; Matsubara, T.; Sugimoto, K. Pneumatic artificial muscle-driven robot control using local update reinforcement learning. Adv. Robot. 2017, 31, 397–412. [Google Scholar] [CrossRef]
- Li, H.; Qi, C.; Gao, F.; Chen, X.; Zhao, Y.; Chen, Z. Mechanism design and workspace analysis of a hexapod robot. Mech. Mach. Theory 2022, 174, 104917. [Google Scholar] [CrossRef]
- Bjelonic, M.; Sankar, P.K.; Bellicoso, C.D.; Vallery, H.; Hutter, M. Rolling in the deep-hybrid locomotion for wheeled-legged robots using online trajectory optimization. IEEE Robot. Autom. Lett. 2020, 5, 3626–3633. [Google Scholar] [CrossRef] [Green Version]
- Xu, K.; Lu, Y.; Shi, L.; Li, J.; Wang, S.; Lei, T. Whole-body stability control with high contact redundancy for wheel-legged hexapod robot driving over rough terrain. Mech. Mach. Theory 2023, 181, 105199. [Google Scholar] [CrossRef]
- Mejri, S.; Gagnol, V.; Le, T.P.; Sabourin, L.; Ray, P.; Paultre, P. Dynamic characterization of machining robot and stability analysis. Int. J. Adv. Manuf. Technol. 2016, 82, 351–359. [Google Scholar] [CrossRef]
- Kamedula, M.; Kashiri, N.; Tsagarakis, N.G. On the kinematics of wheeled motion control of a hybrid wheeled-legged Centauro robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Zhang, P.; Lai, X.; Wang, Y.; Su, C.; Ye, W.; Wu, M. A novel position-posture control method using intelligent optimization for planar underactuated mechanical systems. Mech. Mach. Theory 2019, 140, 258–273. [Google Scholar] [CrossRef]
- Grand, C.; Benamar, F.; Plumet, F.; Bidaud, P. Stability and traction optimization of a reconfigurable wheellegged robot. Int. J. Robot. Res. 2004, 23, 1041–1058. [Google Scholar] [CrossRef]
- Armada, M.A.; de González Santos, P.; Besseron, G.; Grand, C.; Amar, F.B.; Plumet, F.; Bidaud, P. Locomotion modes of an hybrid wheellegged robot. In Climbing and Walking Robots; Springer: Berlin/Heidelberg, Germany, 2005; pp. 825–833. [Google Scholar]
- Nakajima, S. Rtmover: A rough terrain mobile robot with a simple leg–wheel hybrid mechanism. Int. J. Robot. Res. 2011, 30, 1609–1626. [Google Scholar] [CrossRef]
- Chocoteco, J.; Morales, R.; Feliu, V. Improving the climbing/descent performance of stairclimbing mobility systems confronting architectural barriers with geometric disturbances. Mechatronics 2015, 30, 11–26. [Google Scholar] [CrossRef]
- Xu, K.; Wang, S.; Yue, B.; Wang, J.; Peng, H.; Liu, D.; Chen, Z.; Shi, M. Adaptive impedance control with variable target stiffness for wheel-legged robot on complex unknown terrain. Mechatronics 2020, 69, 102388. [Google Scholar] [CrossRef]
- Lim, J.; Lee, I.; Shim, I.; Jung, H.; Joe, H.M.; Bae, H.; Sim, O.; Oh, J.; Jung, T.; Shin, S.; et al. Robot system of DRC-HUBO+ and control strategy of team KAIST in DARPA robotics challenge finals. J. Field Robot. 2017, 34, 802–829. [Google Scholar] [CrossRef]
- Gronowicz, A.; Szrek, J. Design of legvan wheel-legged robot’s mechanical and control system. In SYROM 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 145–158. [Google Scholar]
- Grand, C.; Benamar, F.; Plumet, F. Motion kinematics analysis of wheeled-legged rover over 3D surface with posture adaptation. Mech. Mach. Theory 2010, 45, 477–495. [Google Scholar] [CrossRef] [Green Version]
- Ni, L.; Wu, L.; Zhang, H. Parameters uncertainty analysis of posture control of a four-wheel-legged robot with series slow active suspension system. Mech. Mach. Theory 2022, 175, 104966. [Google Scholar] [CrossRef]
- Jiang, H.; Xu, G.; Zeng, W.; Gao, F. Design and kinematic modeling of a passively-actively transformable mobile robot. Mech. Mach. Theory 2019, 114, 103591. [Google Scholar] [CrossRef]
- Orozco-Magdaleno, E.C.; Cafolla, D.; Castillo-Castaneda, E.; Carbone, G. Static balancing of wheeled-legged hexapod robots. Robotics 2020, 9, 23. [Google Scholar] [CrossRef] [Green Version]
- Cordes, F.; Kirchner, F.; Babu, A. Design and field testing of a rover with an actively articulated suspension system in a Mars analog terrain. J. Field Robot. 2018, 35, 1149–1181. [Google Scholar] [CrossRef]
- Hutter, M.; Leemann, P.; Stevsic, S.; Michel, A.; Jud, D.; Hoepflinger, M.; Siegwart, R.; Figi, R.; Caduff, C.; Loher, M.; et al. Towards optimal force distribution for walking excavators. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015. [Google Scholar]
- Hutter, M.; Leemann, P.; Hottiger, G.; Figi, R.; Tagmann, S.; Rey, G.; Small, G. Force control for active chassis balancing. IEEE/ASME Trans. Mechatron. 2016, 22, 613–622. [Google Scholar] [CrossRef] [Green Version]
- Jarrault, P.; Grand, C.; Bidaud, P. Obstacle crossing with the wheellegged robot hylos based on a robustness criterion on the frictional contacts. In Field Robotics; World Scientific: Singapore, 2012; pp. 676–683. [Google Scholar]
- Du, W.; Fnadi, M.; Benamar, F. Rolling based locomotion on rough terrain for a wheeled quadruped using centroidal dynamics. Mech. Mach. Theory 2020, 15, 103984. [Google Scholar] [CrossRef]
- Hyon, S.H.; Ida, Y.; Ishikawa, J.; Hiraoka, M. Wholebody locomotion and posture control on a torquecontrolled hydraulic rover. IEEE Robot. Autom. Lett. 2019, 4, 4587–4594. [Google Scholar] [CrossRef]
- Yan, L.; Stouraitis, T.; Vijayakumar, S. Decentralized ability-aware adaptive control for multi-robot collaborative manipulation. IEEE Robot. Autom. Lett. 2021, 6, 2311–2318. [Google Scholar] [CrossRef]
- Reid, W.; Pérez-Grau, F.J.; Göktoğan, A.H.; Sukkarieh, S. Actively articulated suspension for a wheel-on-leg rover operating on a martian analog surface. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5596–5602. [Google Scholar]
- Bjelonic, M.; Bellicoso, C.D.; de Viragh, Y.; Sako, D.; Tresoldi, F.D.; Jenelten, F.; Hutter, M. Keep rollin’-whole-body motion control and planning for wheeled quadrupedal robots. IEEE Robot. Autom. Lett. 2019, 4, 2116–2123. [Google Scholar] [CrossRef] [Green Version]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, K.; Li, J.; Si, J.; Liu, Y.; Nie, M. Attitude-Oriented Stability Control with Adaptive Impedance Control for a Wheeled Robotic System on Rough Terrain. Machines 2023, 11, 650. https://doi.org/10.3390/machines11060650
Xu K, Li J, Si J, Liu Y, Nie M. Attitude-Oriented Stability Control with Adaptive Impedance Control for a Wheeled Robotic System on Rough Terrain. Machines. 2023; 11(6):650. https://doi.org/10.3390/machines11060650
Chicago/Turabian StyleXu, Kang, Jianyong Li, Jinge Si, Yueming Liu, and Meng Nie. 2023. "Attitude-Oriented Stability Control with Adaptive Impedance Control for a Wheeled Robotic System on Rough Terrain" Machines 11, no. 6: 650. https://doi.org/10.3390/machines11060650