
Distributed Adaptive Consensus Tracking Control for Second-Order Nonlinear Heterogeneous Multi-Agent Systems with Input Quantization

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Compared with the existing results for distributed consensus tracking control of MASs with input quantization, the MASs considered in this paper use a more general dynamic model.
- In this paper, the consensus tracking errors of MASs can converge to an arbitrarily small set by adjusting only one controller parameter. Compared with the results in [24], the proposed method has a wider range of parameter selections.
2. Preliminaries and Problem Statement
2.1. Notations and Algebraic Graph Basics
2.2. Problem Formulation
3. Distributed Adaptive Controller Design and Stability Analysis
3.1. State Estimation
3.2. Backstepping Design Procedure
3.3. Stability Analysis
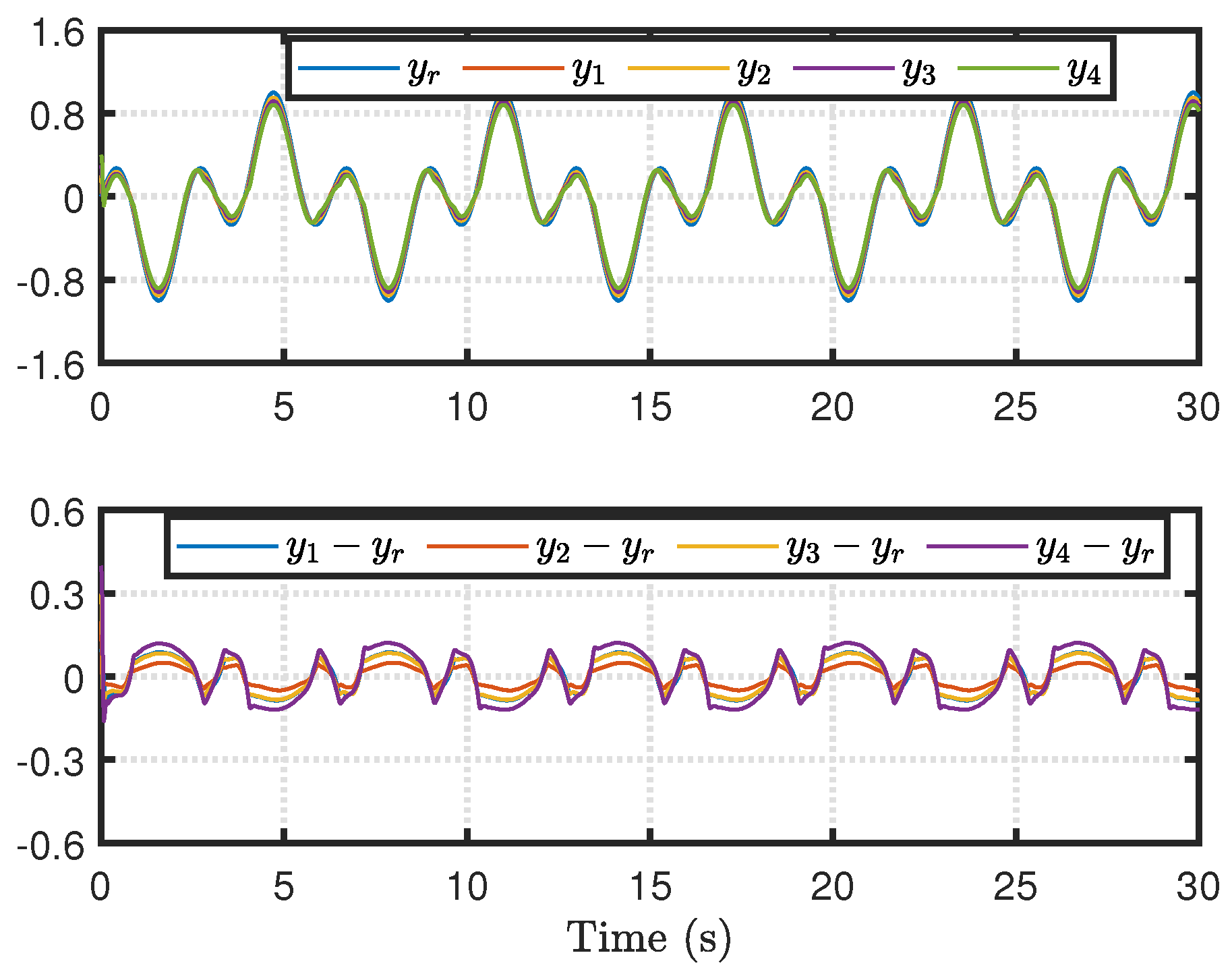
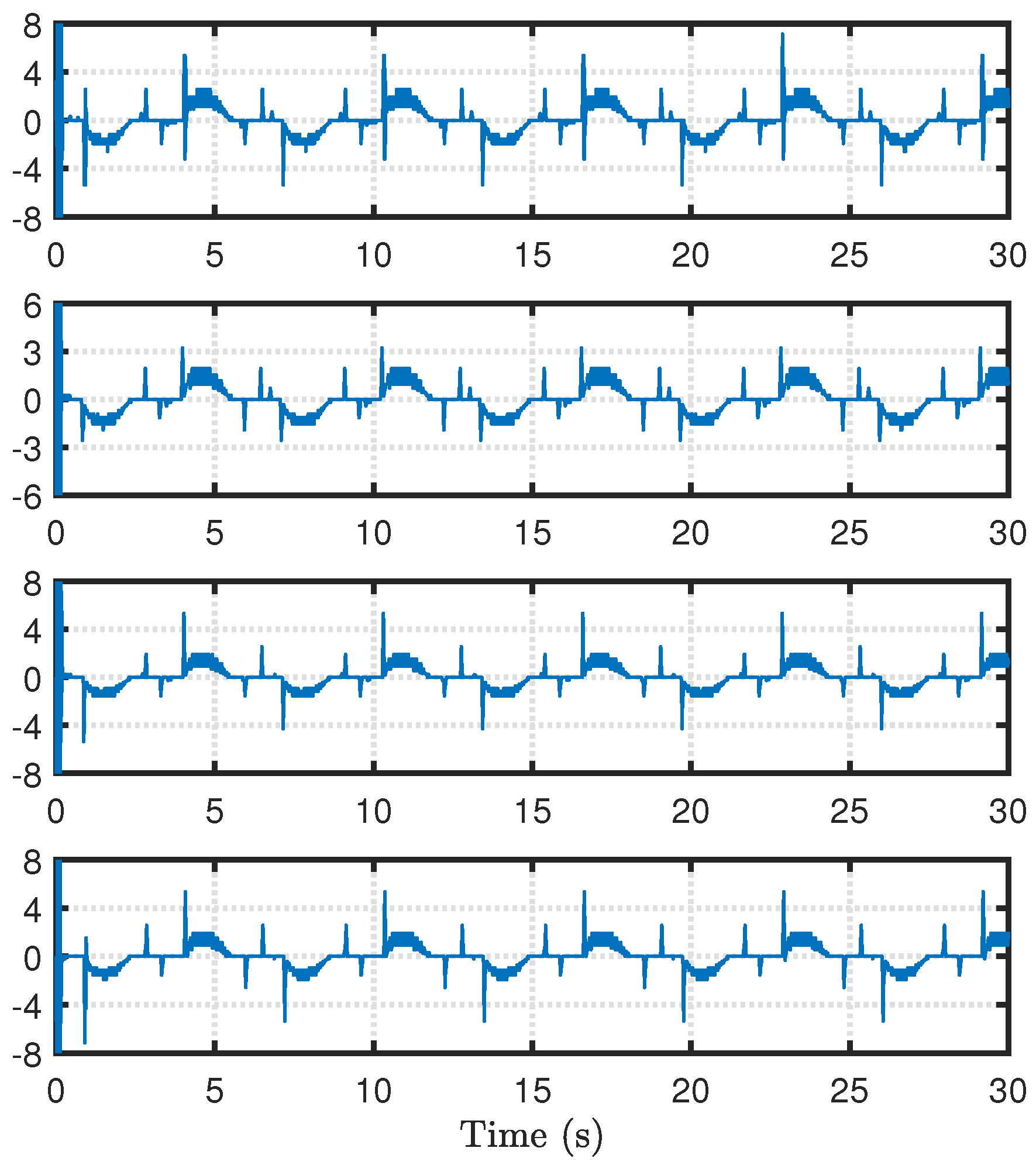
4. An Illustrative Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dong, X.; Zhou, Y.; Ren, Z.; Zhong, Y. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans. Ind. Electron. 2016, 64, 5014–5024. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, J.; Yu, X.; Hill, D.J. Multi-agent systems with dynamical topologies: Consensus and applications. IEEE Circ. Syst. Mag. 2013, 13, 21–34. [Google Scholar] [CrossRef]
- Yao, D.; Li, H.; Lu, R.; Shi, Y. Event-based distributed sliding mode formation control of multi-agent systems and its applications to robot manipulators. Inform. Sci. 2022, 614, 87–103. [Google Scholar] [CrossRef]
- Li, T.; Zhang, J.F. Mean square average-consensus under measurement noises and fixed topologies: Necessary and sufficient conditions. Automatica 2009, 45, 1929–1936. [Google Scholar] [CrossRef]
- Lin, P.; Ren, W.; Yang, C.; Gui, W. Distributed optimization with nonconvex velocity constraints, nonuniform position constraints. IEEE Trans. Autom. Control 2018, 64, 2575–2582. [Google Scholar] [CrossRef]
- Zhang, B.; Jia, Y.; Matsuno, F.; Endo, T. Task-space synchronization of networked mechanical systems with uncertain parameters and communication delays. IEEE Trans. Cybern. 2016, 47, 2288–2298. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Lin, C.; Yu, H. Distributed adaptive fixed-time consensus tracking for second-order multi-agent systems using modified terminal sliding mode. Appl. Math. Comput. 2017, 312, 23–35. [Google Scholar] [CrossRef]
- Wang, X.; Yang, G.H. Fault-tolerant consensus tracking control for linear multiagent systems under switching directed network. IEEE Trans. Cybern. 2019, 50, 1921–1930. [Google Scholar] [CrossRef]
- Wang, W.; Wen, C.; Huang, J. Distributed adaptive asymptotically consensus tracking control of nonlinear multi-agent systems with unknown parameters and uncertain disturbances. Automatica 2017, 77, 133–142. [Google Scholar] [CrossRef]
- Zou, W.; Shi, P.; Xiang, Z.; Shi, Y. Consensus tracking control of switched stochastic nonlinear multiagent systems via event-triggered strategy. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1036–1045. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhu, Y.; Wang, L. Consensus of heterogeneous multi-agent systems. IET Control Theory Appl. 2011, 5, 1881–1888. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, L. Distributed consensus of heterogeneous multi-agent systems with fixed and switching topologies. Int. J. Control 2012, 85, 1967–1976. [Google Scholar] [CrossRef]
- Feng, Y.; Xu, S.; Lewis, F.L.; Zhang, B. Consensus of heterogeneous first-and second-order multi-agent systems with directed communication topologies. Int. J. Robust Nonlinear Control 2015, 25, 362–375. [Google Scholar] [CrossRef]
- Liu, T.; Jiang, Z.P. Distributed output-feedback control of nonlinear multi-agent systems. IEEE Trans. Autom. Control 2013, 58, 2912–2917. [Google Scholar] [CrossRef]
- Su, Y.; Huang, J. Cooperative output regulation of linear multi-agent systems. IEEE Trans. Autom. Control 2011, 57, 1062–1066. [Google Scholar]
- Zhang, H.; Chen, J. Bipartite consensus of multi-agent systems over signed graphs: State feedback and output feedback control approaches. Int. J. Robust Nonlinear Control 2017, 27, 3–14. [Google Scholar] [CrossRef]
- Wang, R. Adaptive output-feedback time-varying formation tracking control for multi-agent systems with switching directed networks. J. Frankl. Inst. 2020, 357, 551–568. [Google Scholar] [CrossRef]
- Lin, Z.; Liu, Z.; Zhang, Y.; Chen, C.P. Command filtered neural control of multi-agent systems with input quantization and unknown control direction. Neurocomputing 2021, 430, 47–57. [Google Scholar] [CrossRef]
- Wang, W.; Ma, H.; Basin, M.V.; Liang, H. Adaptive event-triggered consensus control of multi-agent systems with prescribed performance and input quantization. Int. J. Adapt. Control 2021, 35, 1454–1477. [Google Scholar] [CrossRef]
- Lin, Z.; Liu, Z.; Zhang, Y.; Chen, C.P. Distributed adaptive cooperative control for uncertain nonlinear multi-agent systems with hysteretic quantized input. J. Frankl. Inst. 2020, 357, 4645–4663. [Google Scholar] [CrossRef]
- Tang, X.; Tao, G. An adaptive nonlinear output feedback controller using dynamic bounding with an aircraft control application. Int. J. Adapt. Control 2009, 23, 609–639. [Google Scholar]
- Zhang, Z.; Chen, W. Adaptive output feedback control of nonlinear systems with actuator failures. Inf. Sci. 2009, 179, 4249–4260. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, S.; Guo, Y.; Chu, Y. Robust adaptive output-feedback control for a class of nonlinear systems with time-varying actuator faults. Int. J. Adapt. Control 2010, 24, 743–759. [Google Scholar] [CrossRef]
- Wang, C.; Wen, C.; Guo, L. Adaptive consensus control for nonlinear multiagent systems with unknown control directions and time-varying actuator faults. IEEE Trans. Autom. Control 2020, 66, 4222–4229. [Google Scholar] [CrossRef]
- Yang, T.; Dong, J. Predefined-time adaptive fault-tolerant control for switched odd-rational-power multi-agent systems. IEEE Trans. Autom. Sci. Eng. 2022. [Google Scholar] [CrossRef]
- Xu, L.X.; Ma, H.J. Distributed output-feedback cooperative tracking control of non-linear multi-agent systems with unknown actuator failures. IET Control Theory Appl. 2019, 13, 2465–2475. [Google Scholar] [CrossRef]
- Du, H.; He, Y.; Cheng, Y. Finite-time synchronization of a class of second-order nonlinear multi-agent systems using output feedback control. IEEE Trans. Circuits Syst. I Reg. Pap. 2014, 61, 1778–1788. [Google Scholar]
- Su, Y. Cooperative global output regulation of second-order nonlinear multi-agent systems with unknown control direction. IEEE Trans. Autom. Control 2015, 60, 3275–3280. [Google Scholar] [CrossRef]
- Song, Q.; Cao, J.; Yu, W. Second-order leader-following consensus of nonlinear multi-agent systems via pinning control. Syst. Control Lett. 2010, 59, 553–562. [Google Scholar] [CrossRef]
- Deng, C.; Wen, C.; Wang, W.; Li, X.; Yue, D. Distributed adaptive tracking control for high-order nonlinear multi-agent systems over event-triggered communication. IEEE Trans. Autom. Control 2023, 66, 4222–4229. [Google Scholar]
- Hu, J.; Zheng, W.X. Adaptive tracking control of leader–follower systems with unknown dynamics and partial measurements. Automatica 2014, 50, 1416–1423. [Google Scholar] [CrossRef]
- Wang, W.; Huang, J.; Wen, C.; Fan, H. Distributed adaptive control for consensus tracking with application to formation control of nonholonomic mobile robots. Automatica 2014, 50, 1254–1263. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Li, Y. Distributed Adaptive Consensus Tracking Control for Second-Order Nonlinear Heterogeneous Multi-Agent Systems with Input Quantization. Machines 2023, 11, 524. https://doi.org/10.3390/machines11050524
Xu L, Li Y. Distributed Adaptive Consensus Tracking Control for Second-Order Nonlinear Heterogeneous Multi-Agent Systems with Input Quantization. Machines. 2023; 11(5):524. https://doi.org/10.3390/machines11050524
Chicago/Turabian StyleXu, Linxing, and Yang Li. 2023. "Distributed Adaptive Consensus Tracking Control for Second-Order Nonlinear Heterogeneous Multi-Agent Systems with Input Quantization" Machines 11, no. 5: 524. https://doi.org/10.3390/machines11050524