
Co-Simulation Modeling and Multi-Objective Optimization of Dynamic Characteristics of Flow Balancing Valve
Abstract
:1. Introduction
2. Establishment of Dynamic Model of Dynamic Flow Balance Valve
2.1. Structural Characteristics and Working Principle of the Valve
2.2. Establishment of Dynamic Model of Dynamic Flow Balance Valve
3. Co-Simulation Analysis of Dynamic Characteristics and Control Accuracy
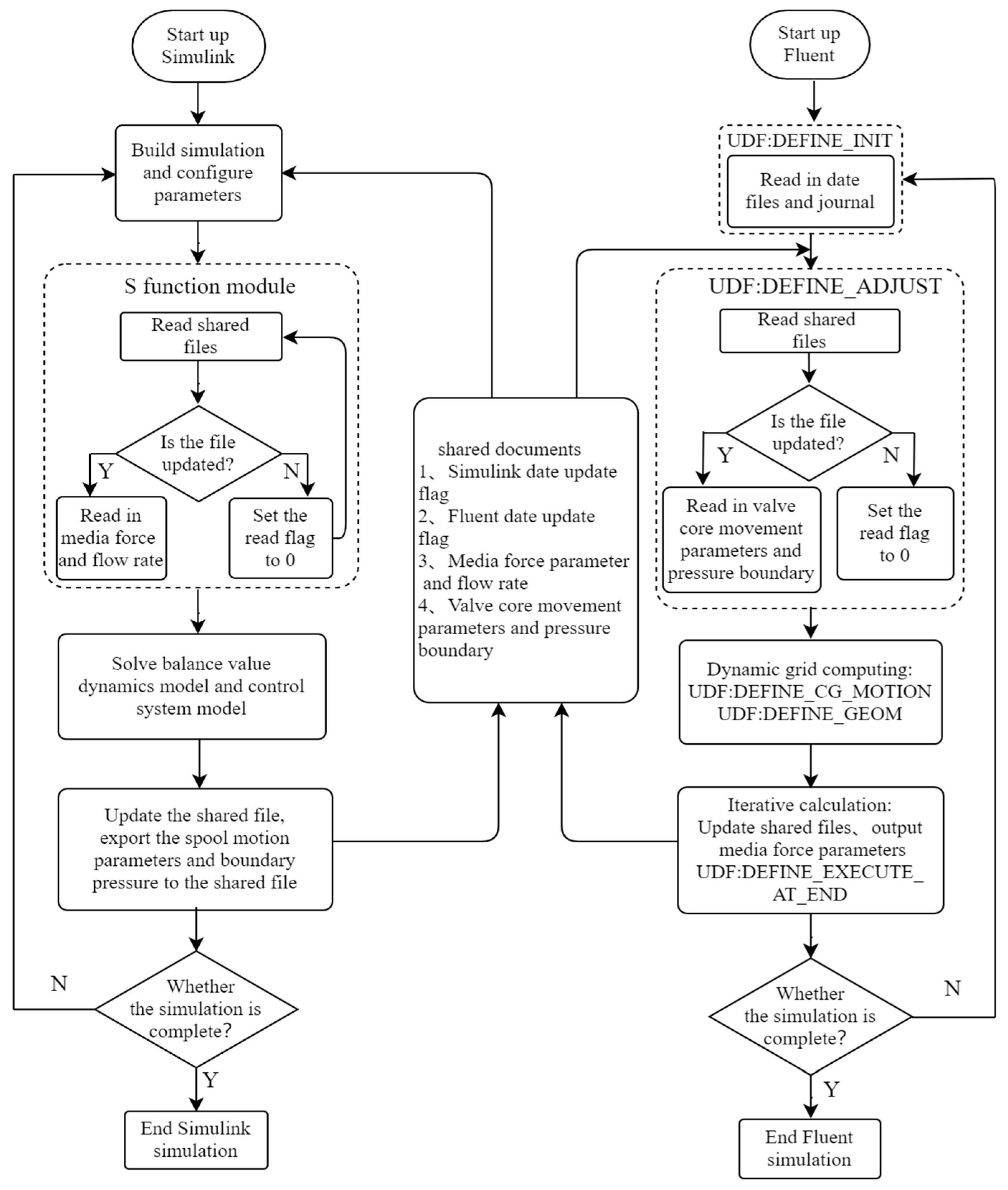
3.1. Establishment of Co-Simulation Model
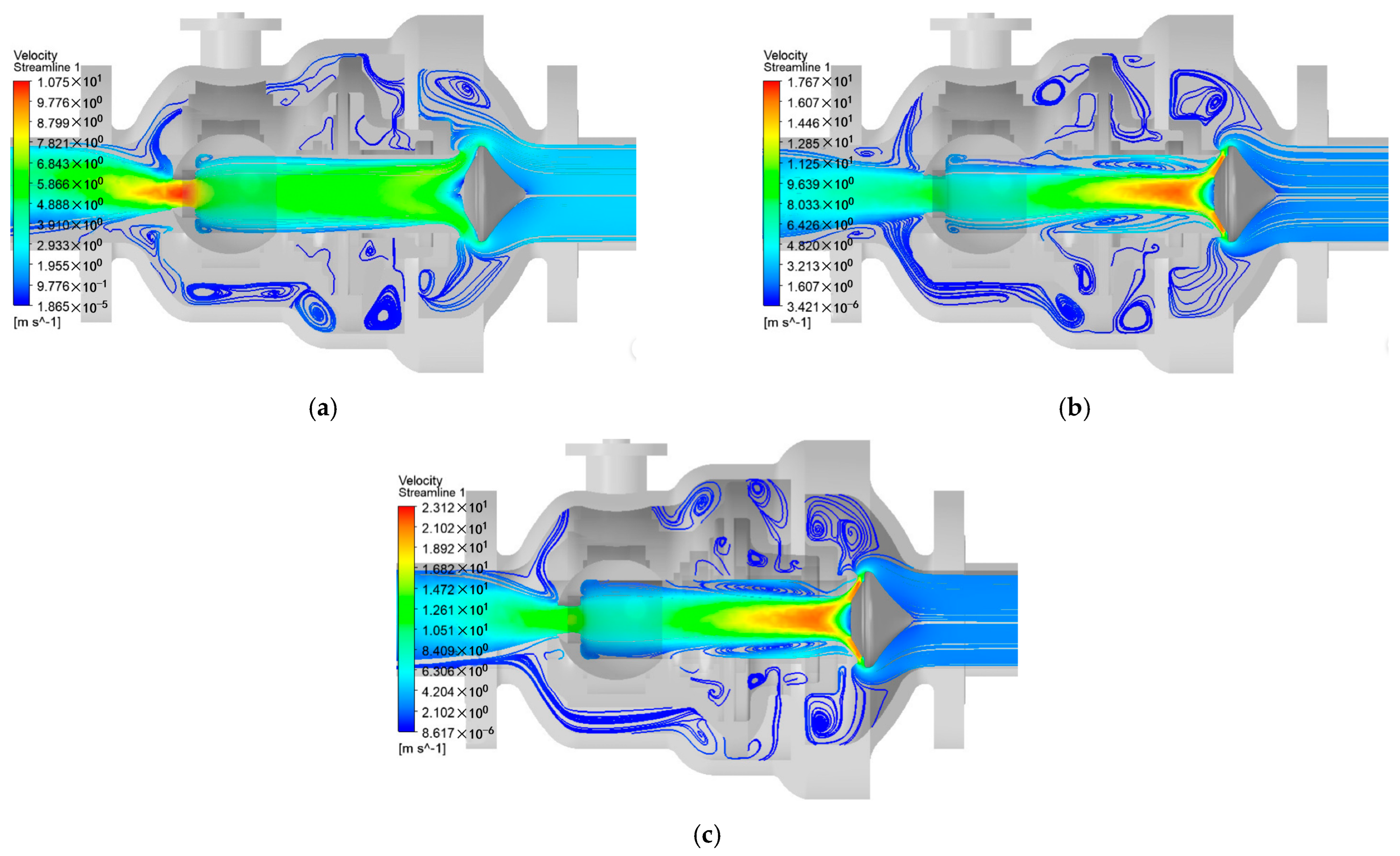
3.2. Selection of CFD Turbulence Model and Meshing of Flow Channels
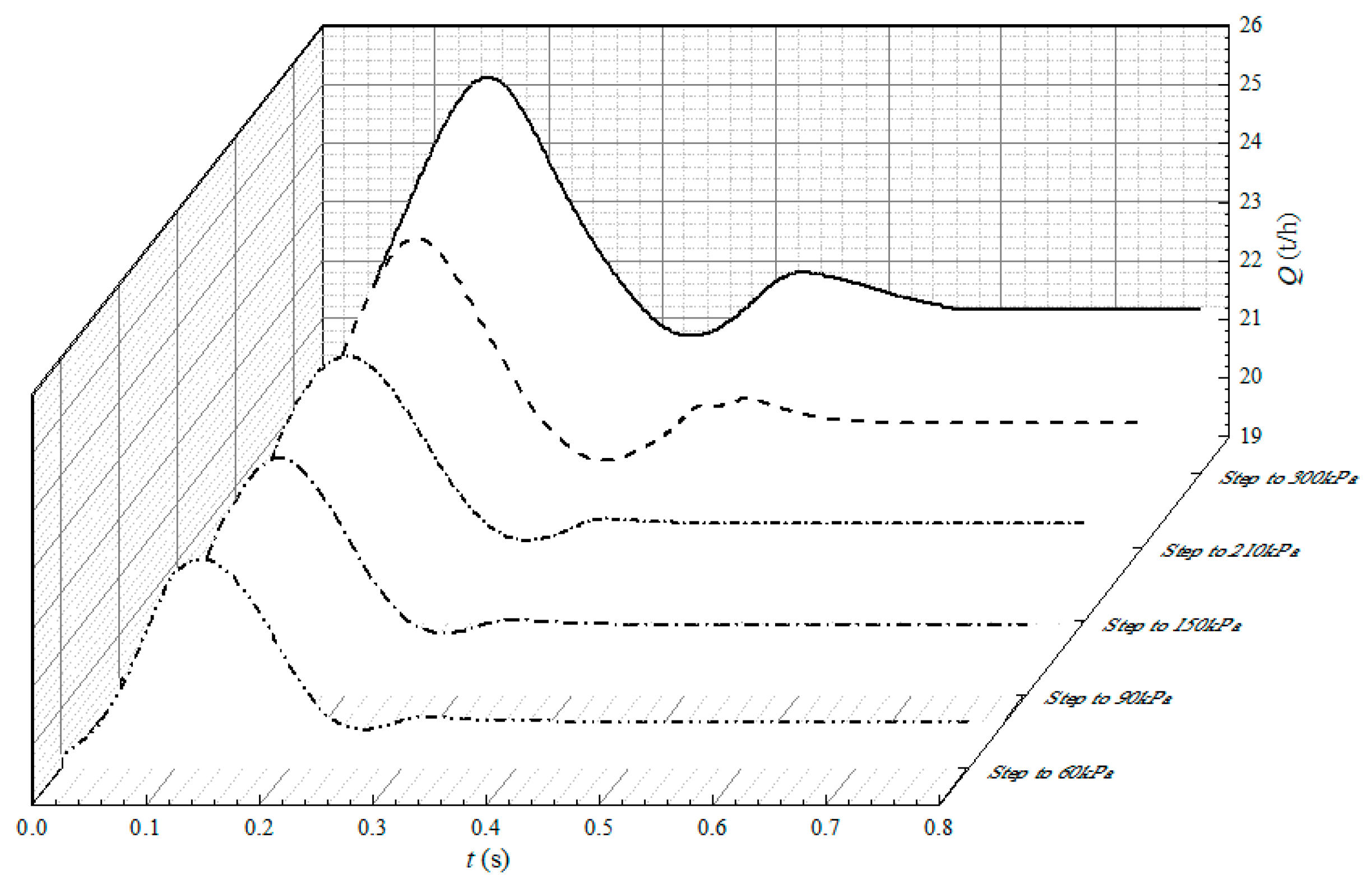
3.3. Co-Simulation Results of Dynamic Characteristics and Control Accuracy
4. Test Results and Precision Analysis
4.1. Comparison between Experiment and Simulation
4.2. Analysis of Valve Performance Based on Test Data
5. Optimization of Performance of Dynamic Flow Balance Valve
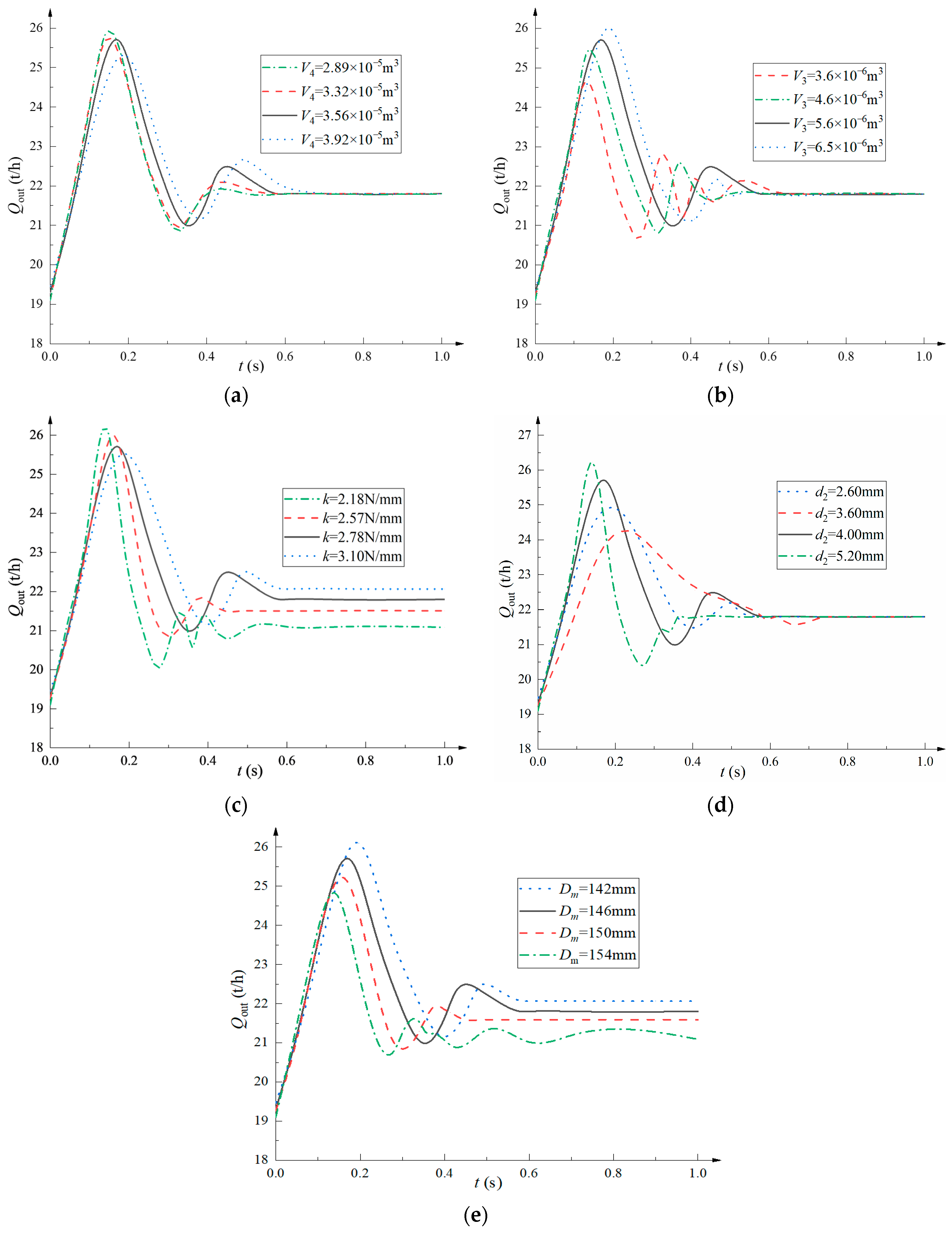
5.1. Influence of Each Structural Parameter on Dynamic Characteristics and Control Stability
5.2. Optimization of Dynamic Flow Balancing Valves with Improved NSGA-II Algorithm
5.2.1. Mathematical Model
5.2.2. Design of Experiments
5.2.3. Combined Surrogate Model Construction
5.2.4. Optimization of Valve Based on Improved NSGA-II
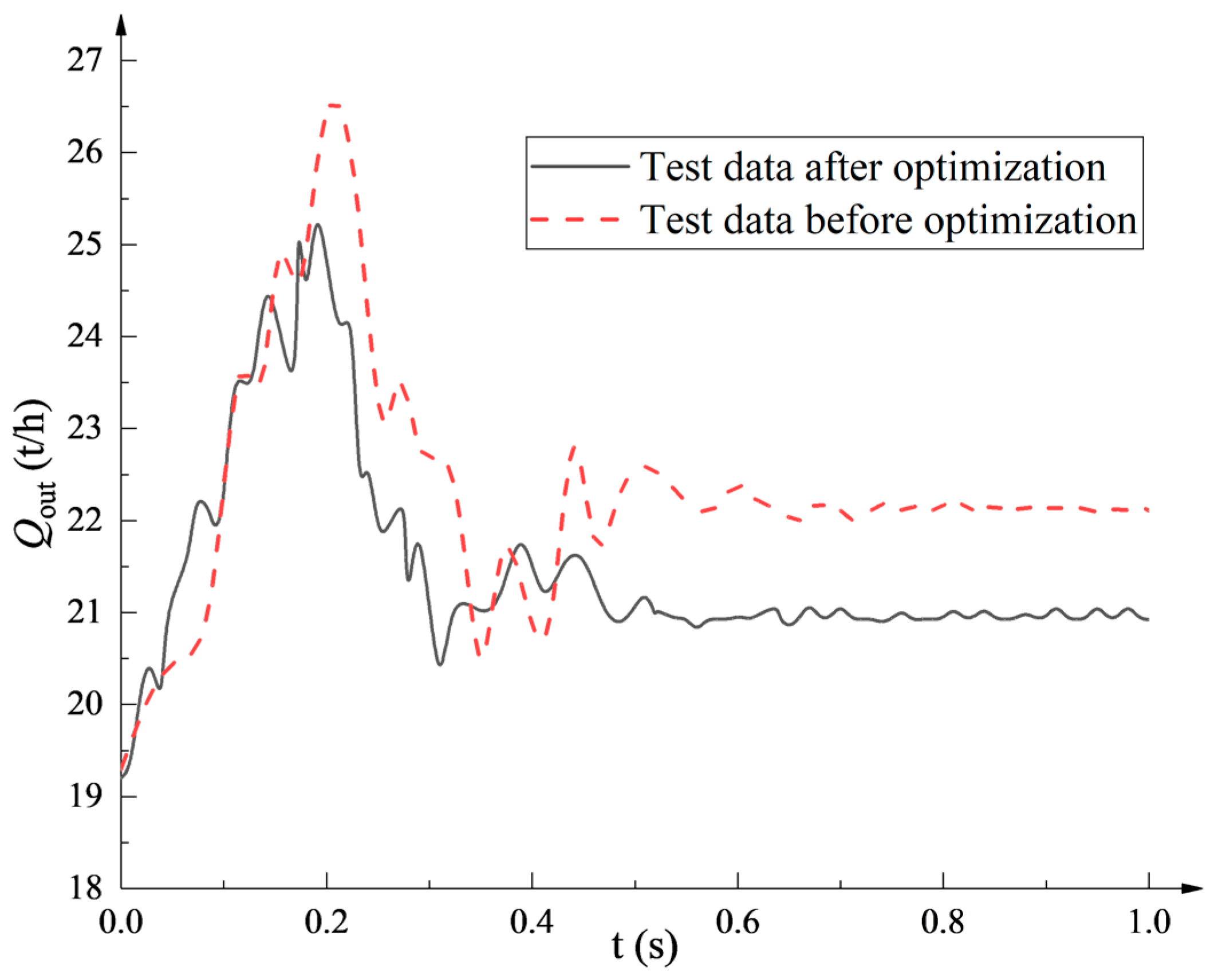
5.3. Experiment to Verify the Optimization Effect
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yuan, Y.; Neng, Z.; Haizhu, Z.; Hai, W. A New Model Predictive Control Method for Eliminating Hydraulic Oscillation and Dynamic Hydraulic Imbalance in a Complex Chilled Water System. Energies 2021, 14, 3608. [Google Scholar] [CrossRef]
- Ran, F.; Gao, D.C.; Zhang, X.; Chen, S. A virtual sensor based self-adjusting control for HVAC fast demand response in commercial buildings towards smart grid applications. Appl. Energy 2020, 269, 115103. [Google Scholar] [CrossRef]
- Wen, S.; Gao, R.; Guan, H.; Li, H.; Wang, M.; Zhang, S.; Li, A. Air damper with Controlling Capacity Unrelated to duct system resistance. Build. Eng. 2021, 43, 102388. [Google Scholar] [CrossRef]
- Stobbe, M.; Gerber, A.; Herkel, S.; Réhault, N.; Nytsch-Geusen, C. Information model development for the quality assurance of technical equipment in small buildings. J. Phys. Conf. Ser. 2021, 2042, 012082. [Google Scholar] [CrossRef]
- Liang, J.; Yang, Q.; Liu, L.; Li, X. Modeling and performance evaluation of shallow ground water heat pumps in Beijing plain. China Build. Energy 2011, 43, 3131–3138. [Google Scholar] [CrossRef]
- Li, S.; Wu, P.; Cao, L.; She, Y. CFD simulation of dynamic characteristics of a solenoid valve for exhaust gas turbocharger system. Appl. Therm. Eng. 2017, 110, 213–222. [Google Scholar] [CrossRef]
- Liu, P.; Liu, Y.; Wei, X.; Xin, C.; Sun, Q.; Wu, X. Performance analysis and optimal design based on dynamic characteristics for pressure compensated subsea all-electric valve actuator. Ocean Eng. 2019, 191, 106568–106579. [Google Scholar] [CrossRef]
- Lei, J.; Tao, J.; Liu, C.; Wu, Y. Flow model and dynamic characteristics of a direct spring loaded poppet relief valve. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 1657–1664. [Google Scholar] [CrossRef]
- Saha, B.K.; Chattopadhyay, H.; Mandal, P.B.; Gangopadhyay, T. Dynamic simulation of a pressure regulating and shut-off valve. Comput. Fluids 2014, 101, 233–240. [Google Scholar] [CrossRef]
- Liu, J.; Xie, H.; Hu, L.; Yang, H.; Fu, X. Realization of direct flow control with load pressure compensation on a load control valve applied in overrunning load hydraulic systems. Flow Meas. Instrum. 2017, 53, 261–268. [Google Scholar] [CrossRef]
- Ye, J.; Zhao, Z.; Cui, J.; Hua, Z.; Peng, W.; Jiang, P. Transient flow behaviors of the check valve with different spool-head angle in high-pressure hydrogen storage systems. Energy Storage 2021, 46, 103761. [Google Scholar] [CrossRef]
- Zang, J.L.; Yao, H.Y.; Zhang, F.H.; Liu, Z.Y.; Meng, J.; Zhu, J.M.; Wang, Z.M.; Qian, J.Y. Dynamic characteristics analysis of pilot valves with different inlet diameters installed on the main steam valve set. Case Stud. Therm. Eng. 2022, 34, 102004. [Google Scholar] [CrossRef]
- Zong, C.; Li, Q.; Li, K.; Song, X.; Chen, D.; Li, F.; Wang, X. Computational fluid dynamics analysis and extended adaptive hybrid functions model-based design optimization of an explosion-proof safety valve. Eng. Appl. Comput. Fluid Mech. 2022, 16, 296–315. [Google Scholar] [CrossRef]
- Tang, W.; Xu, G.; Zhang, S.; Jin, S.; Wang, R. Digital twin-driven mating performance analysis for precision spool valve. Machines 2021, 9, 157. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, S.; Liu, X.; Xie, H.; Dou, J. Flow resistance optimization of link lever butterfly valve based on combined surrogate model. Struct. Multidiscip. Optim. 2021, 64, 4255–4270. [Google Scholar] [CrossRef]
- Mao, J.; Yang, L.; Hu, Y.; Liu, K.; Du, J. Research on Vehicle Adaptive Cruise Control Method Based on Fuzzy Model Predictive Control. Machines 2021, 9, 160. [Google Scholar] [CrossRef]
- Fan, Z.; Li, W.; Cai, X.; Huang, H.; Fang, Y.; You, Y.; Mo, J.; Wei, C.; Goodman, E. An improved epsilon constraint-handling method in MOEA/D for CMOPs with large infeasible regions. Appl. Soft Comput. 2019, 23, 12491–12510. [Google Scholar] [CrossRef] [Green Version]
- Jiang, R.; Ci, S.; Liu, D.; Cheng, X.; Pan, Z. A hybrid multi-objective optimization method based on NSGA-II algorithm and entropy weighted TOPSIS for lightweight design of dump truck carriage. Machines 2021, 9, 156. [Google Scholar] [CrossRef]
- Peng, C.; Ouyang, X.; Guo, S.; Zhou, Q.; Yang, H. Numerical analysis of the traction effect on reciprocating seals in the hydraulic actuator. Tribol. Int. 2020, 143, 105966. [Google Scholar] [CrossRef]
- Wang, N.; Pang, S.; Ye, C.; Fan, T.; Choi, S.B. The friction and wear mechanism of O-rings in magnetorheological damper: Numerical and experimental study. Tribol. Int. 2021, 157, 106898. [Google Scholar] [CrossRef]
- Qian, J.Y.; Wu, J.Y.; Gao, Z.X.; Wu, A.; Jin, Z.J. Hydrogen decompression analysis by multi-stage Tesla valves for hydrogen fuel cell. Int. J. Hydrogen Energy 2019, 44, 13666–13674. [Google Scholar] [CrossRef]
- Qian, J.-Y.; Zhang, M.; Lei, L.-N.; Chen, F.-Q.; Chen, L.-L.; Wei, L.; Jin, Z.-J. Mach number analysis on multi-stage perforated plates in high pressure reducing valve. Energy Convers. Manag. 2016, 119, 81–90. [Google Scholar] [CrossRef]
- Ullah, A.; Amanat, A.; Imran, M.; Gillani, S.S.J.; Kilic, M.; Khan, A. Effect of turbulence modeling on hydrodynamics of a turbulent contact absorber. Chem. Eng. Process.-Process Intensif. 2020, 156, 108101. [Google Scholar] [CrossRef]
- Küçüktopcu, E.; Cemek, B. Evaluating the influence of turbulence models used in computational fluid dynamics for the prediction of airflows inside poultry houses. Biosyst. Eng. 2019, 183, 1–12. [Google Scholar] [CrossRef]
- Zhan, D.; Cheng, Y.; Liu, J. Expected Improvement Matrix-Based Infill Criteria for Expensive Multiobjective Optimization. IEEE Trans. Evol. Comput. 2017, 21, 956–975. [Google Scholar] [CrossRef]
- Segovia, E.; de Vera, G.; Miró, M.; Ramis, J.; Climent, M. Cement mortar cracking under accelerated steel corrosion test: A mechanical and electrochemical model. Electroanal. Chem. 2021, 896, 115222. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, X.; Cheng, R.; He, C.; Jin, Y. Guiding Evolutionary Multiobjective Optimization With Generic Front Modeling. IEEE Trans. Cybern. 2018, 50, 1106–1119. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Type | Nodes | Grid Cells | Q (t/h) |
|---|---|---|---|
| grid 1 | 375,843 | 1,724,088 | 18.213 |
| grid 2 | 533,730 | 2,535,383 | 18.931 |
| grid 3 | 973,361 | 2,993,506 | 19.301 |
| grid 4 | 1,353,821 | 3,386,235 | 19.321 |
| Output Response | Weight Factor | |
|---|---|---|
| RSM | RBF | |
| Δ | 0.5040 | 0.4960 |
| ts | 0.4391 | 0.5609 |
| E | 0.4516 | 0.5484 |
| Case | Structural Parameters | Response Value | ||||||
|---|---|---|---|---|---|---|---|---|
| k (N/mm) | V3 (m3) | V4 (m3) | Dm (mm) | d (mm) | δ (t/h) | ts (s) | e (t/h) | |
| A | 2.35 | 5.31 × 10−6 | 3.39 × 10−5 | 151.7 | 3.4 | 3.52 | 575 | 1.61 |
| B | 2.21 | 4.96 × 10−6 | 3.28 × 10−5 | 153.8 | 3.2 | 4.12 | 563 | 1.38 |
| C | 2.69 | 3.93 × 10−6 | 2.96 × 10−5 | 147.2 | 4.5 | 5.49 | 363 | 2.13 |
| initialization | 2.78 | 5.60 × 10−6 | 3.56 × 10−5 | 146.0 | 4.0 | 4.16 | 570 | 2.39 |
| optimization | 2.32 | 4.60 × 10−6 | 3.19 × 10−5 | 151.3 | 3.7 | 4.03 | 451 | 1.81 |
| Case | Structural Parameters | Response Value | ||||||
|---|---|---|---|---|---|---|---|---|
| k (N/mm) | V3 (m3) | V4 (m3) | Dm (mm) | D (mm) | Δ (t/h) | ts (s) | e (t/h) | |
| A | 2.32 | 5.28 × 10−6 | 3.41 × 10−5 | 151.5 | 3.3 | 3.13 | 558 | 1.57 |
| B | 2.18 | 4.89 × 10−6 | 3.23 × 10−5 | 154.1 | 3.1 | 3.69 | 559 | 1.32 |
| C | 2.61 | 3.92 × 10−6 | 2.93 × 10−5 | 147.0 | 4.5 | 5.16 | 352 | 2.09 |
| initialization | 2.78 | 5.60 × 10−6 | 3.56 × 10−5 | 146.0 | 4.0 | 4.16 | 570 | 2.39 |
| optimization | 2.30 | 4.52 × 10−6 | 3.11 × 10−5 | 151.6 | 3.6 | 3.86 | 427 | 1.65 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, J.; Li, S.; Pan, W.; Yang, L. Co-Simulation Modeling and Multi-Objective Optimization of Dynamic Characteristics of Flow Balancing Valve. Machines 2023, 11, 337. https://doi.org/10.3390/machines11030337
Hou J, Li S, Pan W, Yang L. Co-Simulation Modeling and Multi-Objective Optimization of Dynamic Characteristics of Flow Balancing Valve. Machines. 2023; 11(3):337. https://doi.org/10.3390/machines11030337
Chicago/Turabian StyleHou, Jianjun, Shuxun Li, Weiliang Pan, and Lingxia Yang. 2023. "Co-Simulation Modeling and Multi-Objective Optimization of Dynamic Characteristics of Flow Balancing Valve" Machines 11, no. 3: 337. https://doi.org/10.3390/machines11030337