
Fingerprinting-Based Indoor Positioning Using Data Fusion of Different Radiocommunication-Based Technologies


Abstract
:1. Introduction
- Wide range: the range of IoT devices is extremely wide, there are a lot of communication standards that can be used for creating the network;
- Intelligence: by integrating software algorithms and appropriate hardware devices, IoT devices become “smart”, communicate with each other and with the user;
- Sensing: sensors are needed to monitor the environment, changes in the environment, and to be able to intervene;
- Complex systems: it is possible to create systems with a complex structure both in terms of hardware and software;
- A lot of data: since many devices are used in IoT systems, a lot of data is generated by them;
- Low power consumption: most devices are designed so that they do not consume much energy.
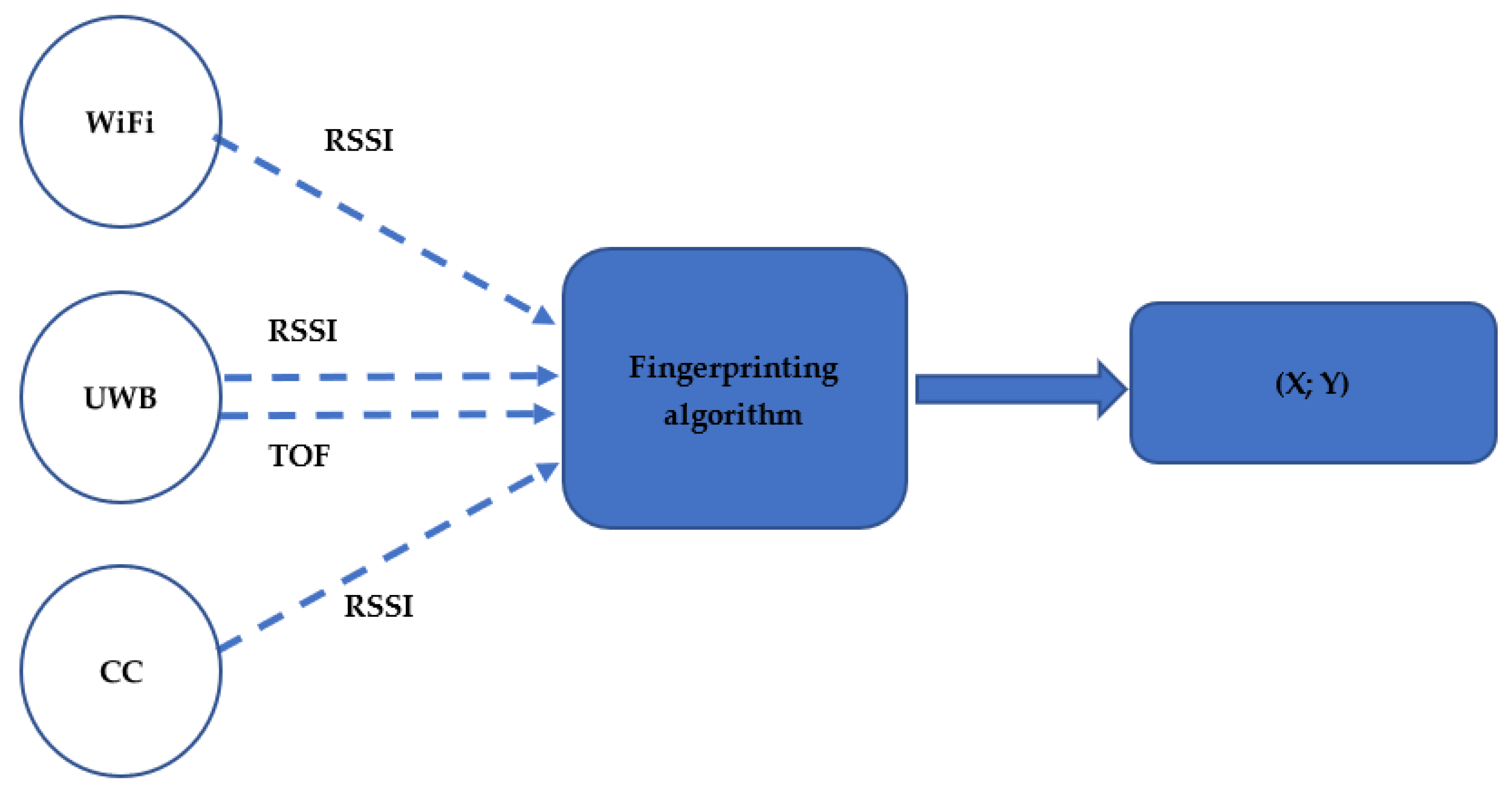
- A novel fingerprinting-based approach is proposed, which utilizes the fusion of measurements collected using different technologies, namely WiFi RSSI, ultra-wideband RSSI, ultra-wideband time of flight and RSSI in the 433 MHz frequency band;
- The proposed method is validated using measurements collected with four different technologies in a setup containing five access points (APs). The measurements are divided into learning and test points;
- The fusion-based performance using the four technologies is evaluated for all 17 different combinations;
- Three different widely used learning methods, namely the weighted K-nearest neighbor (WKNN), the random forest (RF) and the artificial neural network (ANN) are tested in the approach to examine which provides the best performance.
2. Related Works
2.1. WiFi
2.2. Radio Frequency Identification Technology
2.3. Ultra-Wideband Technology
2.4. Bluetooth and Bluetooth Low-Energy Technologies
2.5. ZigBee and IEEE 802.15.4
2.6. Comparison of Different Technologies
3. Experimental Setup
3.1. Received Signal Strength Indication
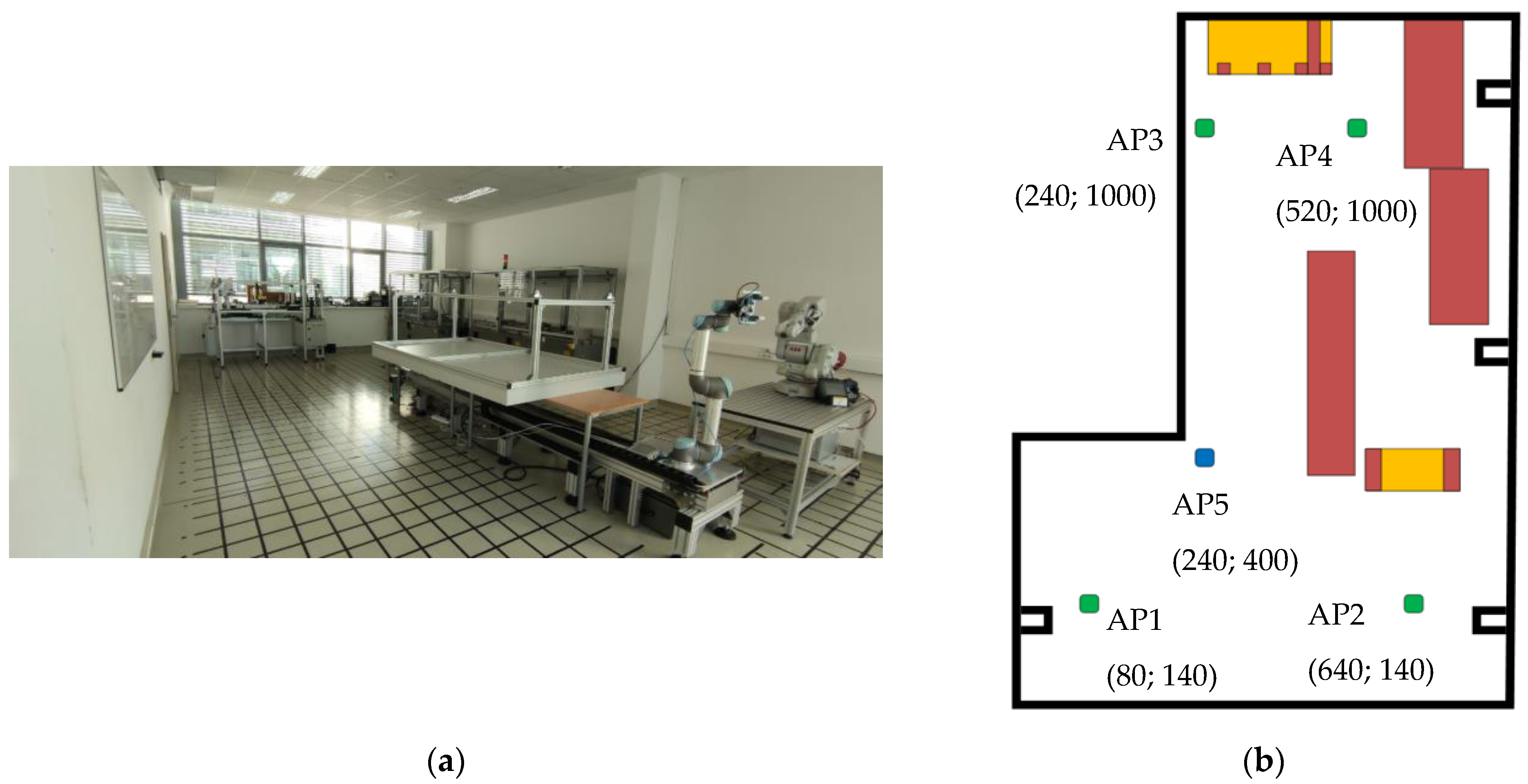
3.2. Measurement System
- AP1 (80, 140);
- AP2 (640, 140);
- AP3 (240, 1000);
- AP4 (520, 1000);
- AP5 (240, 400).
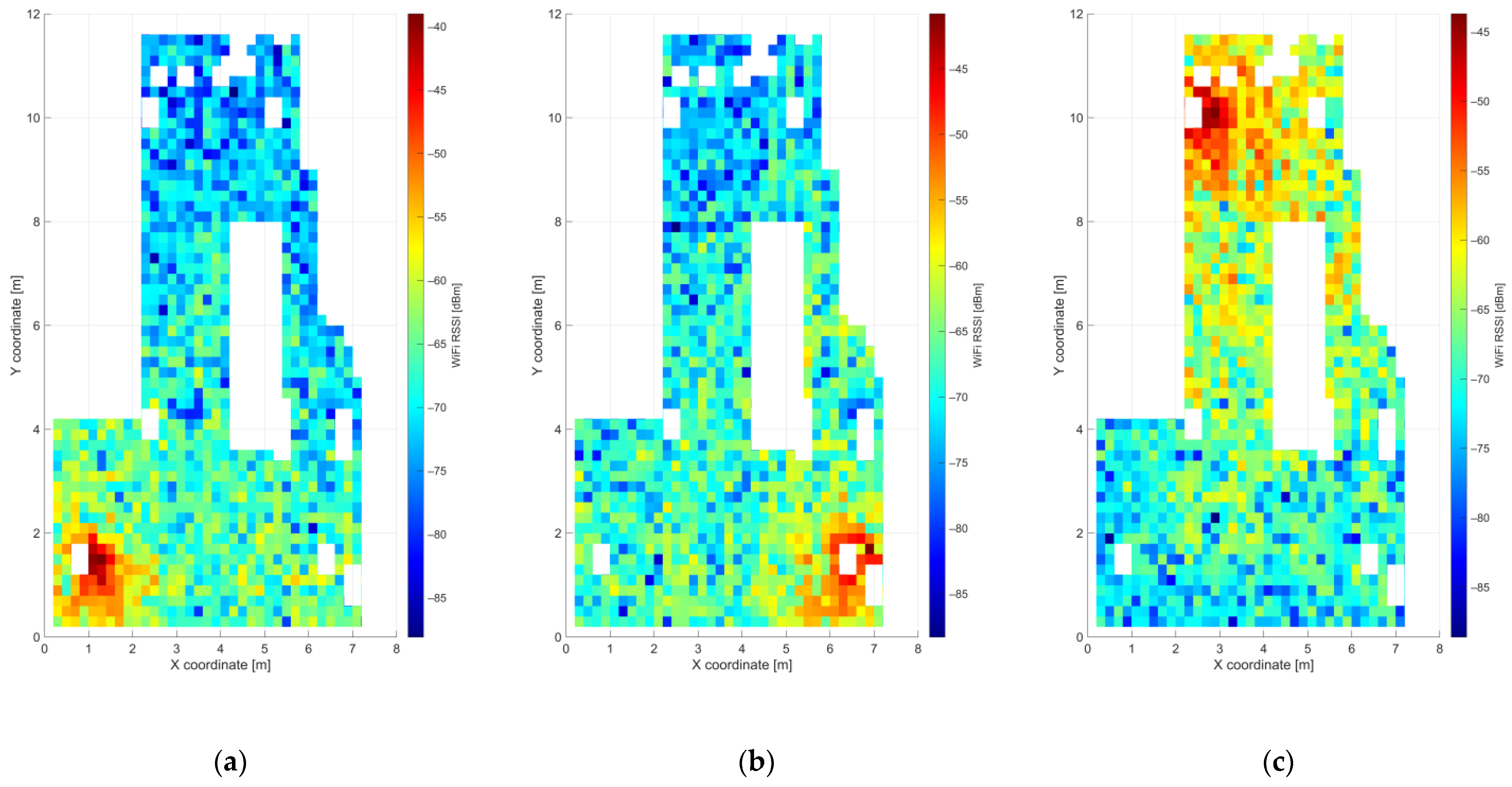
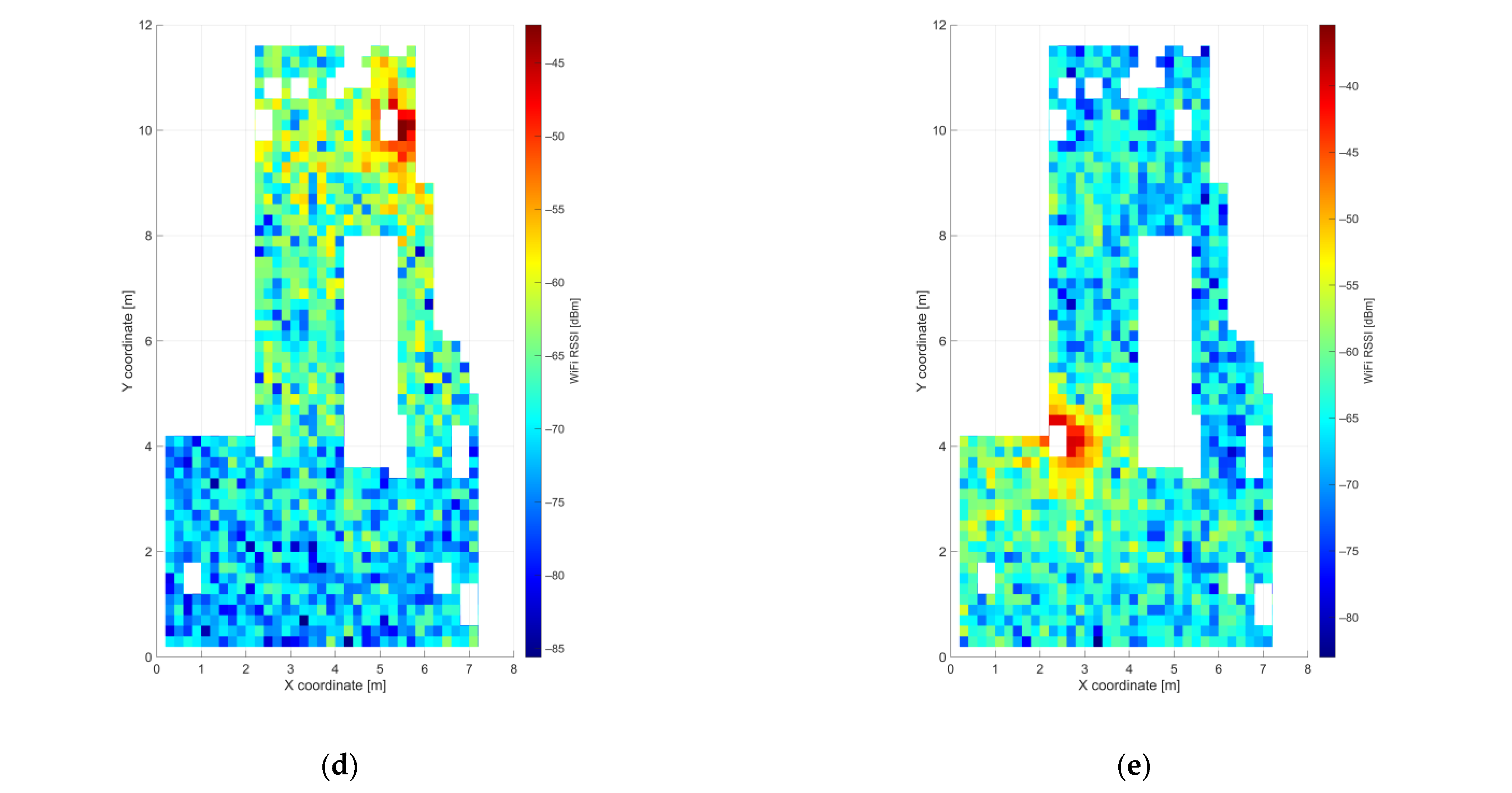
3.3. WiFi Received Signal Strength Indication
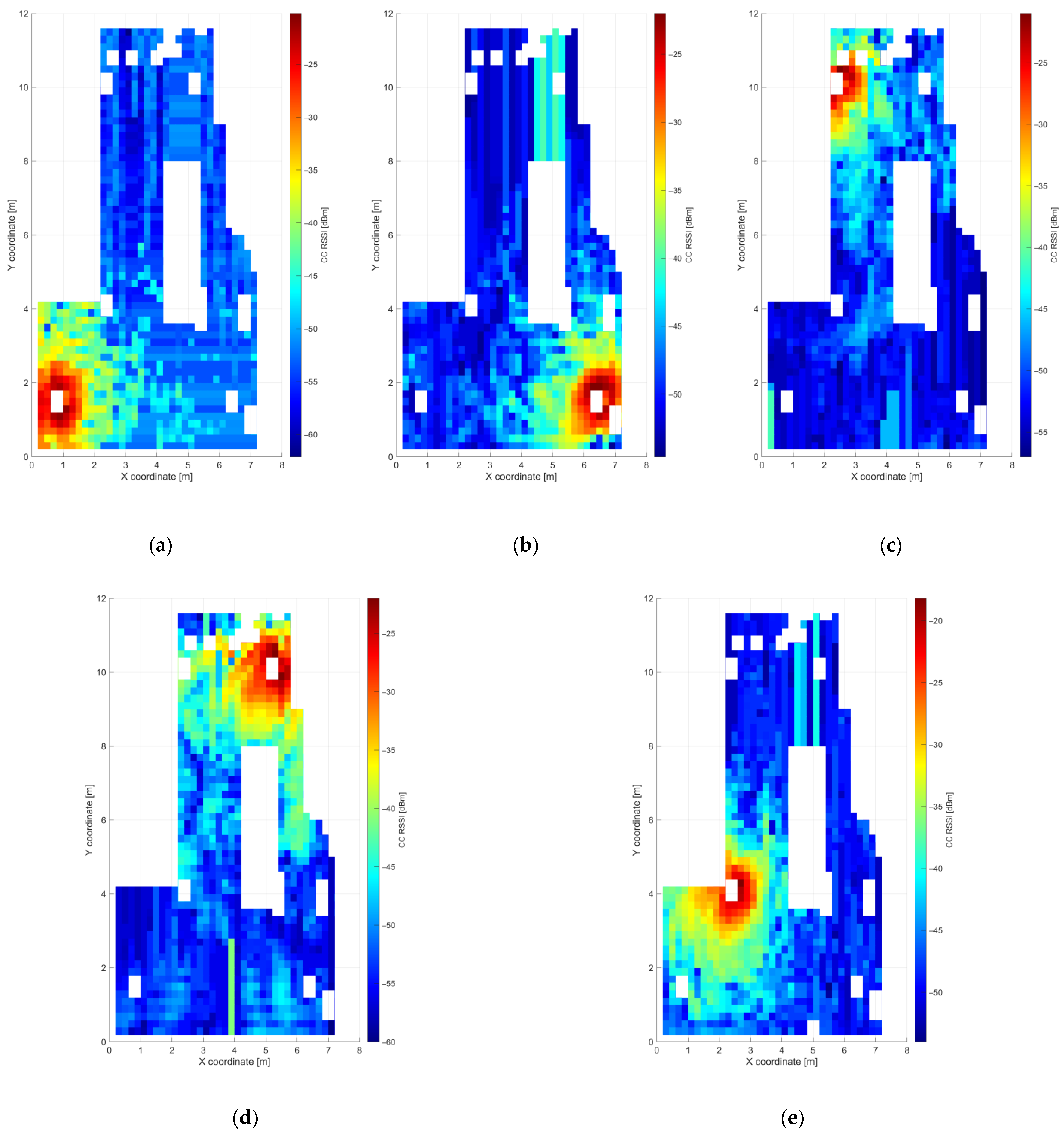
3.4. CC Received Signal Strength Indication
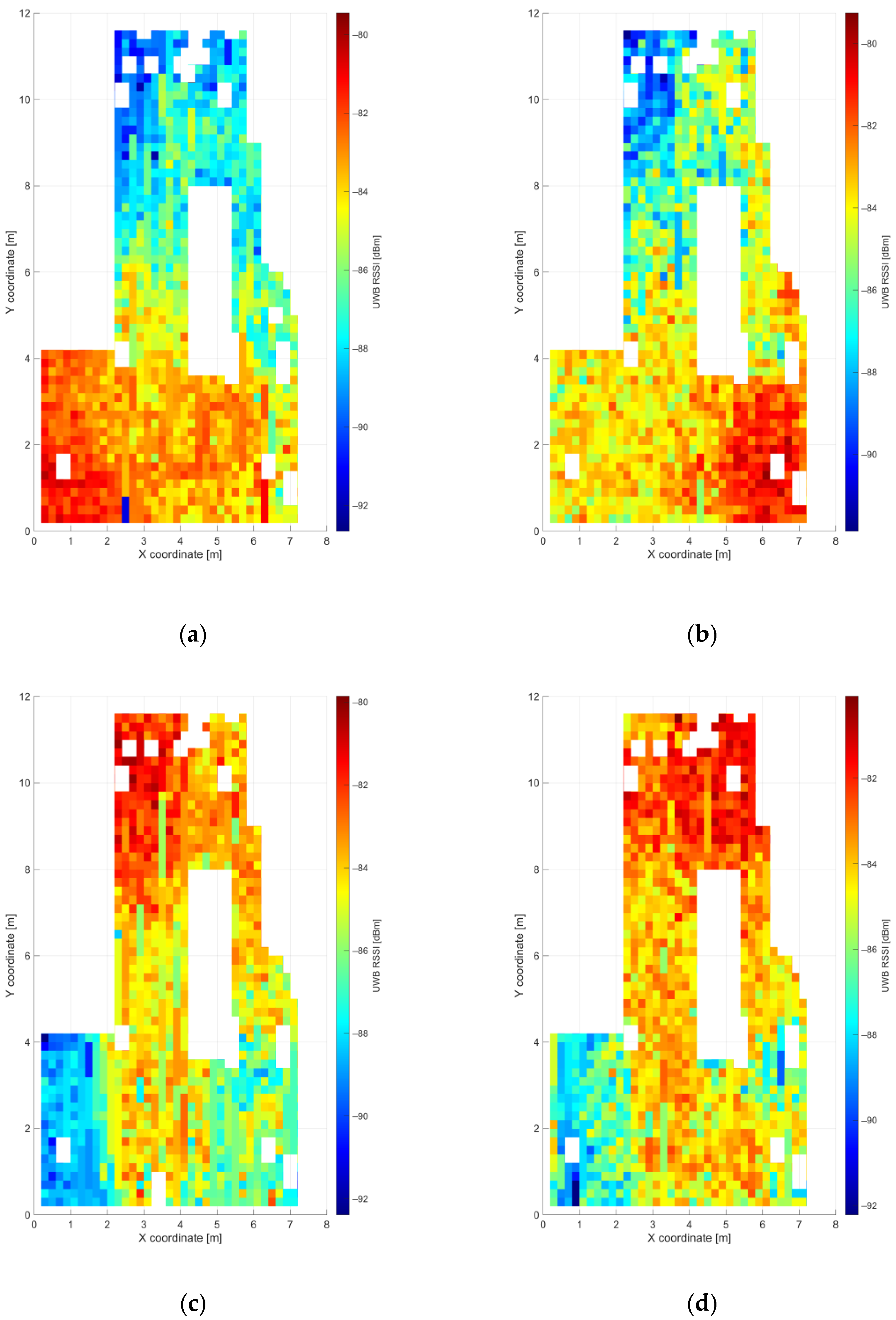
3.5. Ultra-Wideband Received Signal Strength Indication
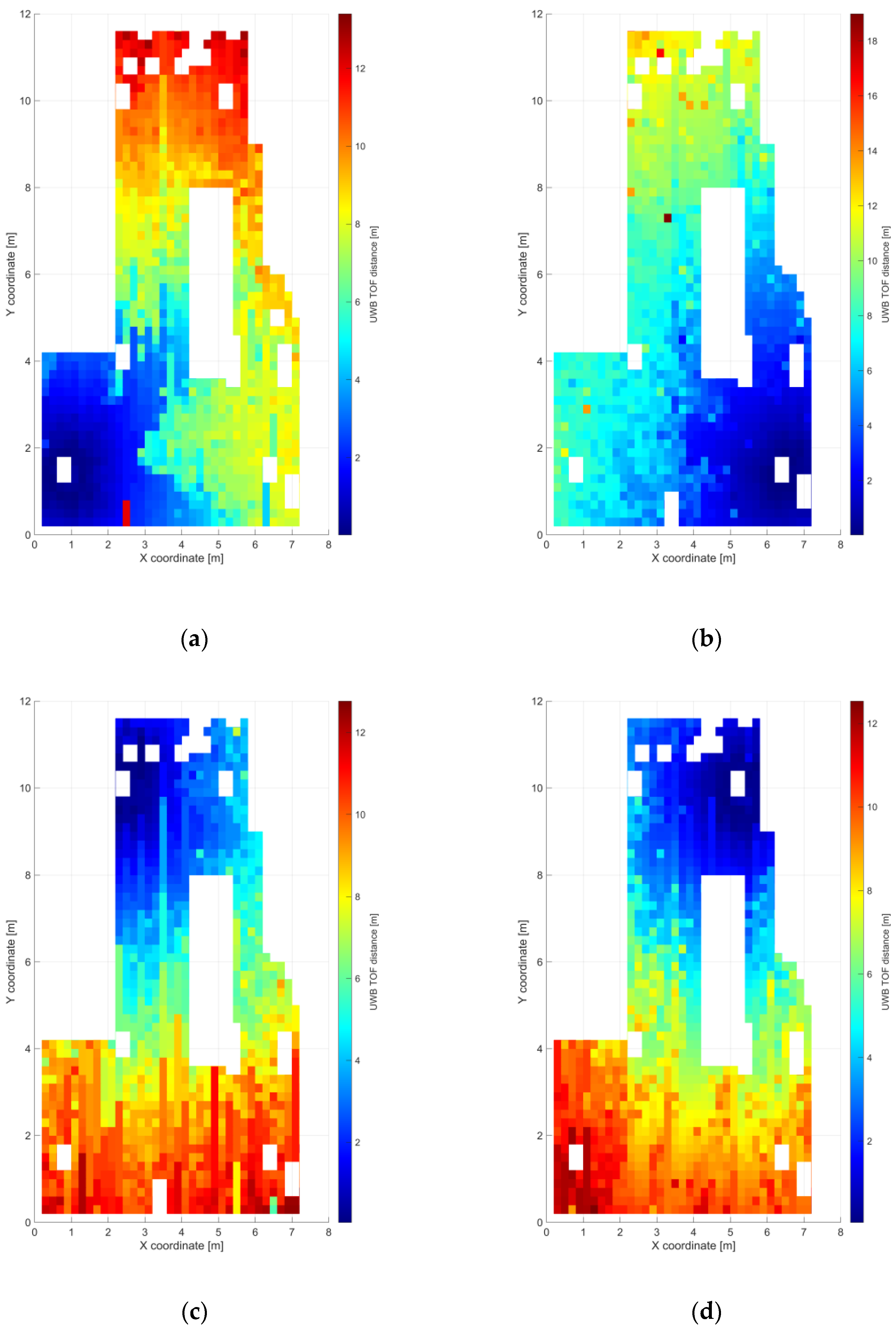
3.6. Ultra-Wideband Time of Flight
4. Proposed Fingerprinting-Based Method
4.1. Tested Fingerprinting Algorithms
4.1.1. Weighted K-Nearest Neighbor
4.1.2. Random Forest
4.1.3. Artificial Neural Networks
5. Results
- 1.
- CC RSSI;
- 2.
- WIFI RSSI;
- 3.
- UWB RSSI;
- 4.
- UWB TOF;
- 5.
- CC RSSI + UWB TOF;
- 6.
- CC RSSI + UWB RSSI;
- 7.
- CC RSSI + WIFI RSSI;
- 8.
- UWB RSSI + WIFI RSSI;
- 9.
- UWB RSSI + UWB TOF;
- 10.
- UWB TOF + WIFI RSSI;
- 11.
- CC RSSI + UWB TOF + WIFI RSSI;
- 12.
- CC RSSI + UWB TOF + UWB RSSI;
- 13.
- CC RSSI + UWB RSSI + WIFI RSSI;
- 14.
- WIFI RSSI + UWB TOF + UWB RSSI;
- 15.
- UWB RSSI + CC RSSI + UWB TOF + WIFI RSSI.
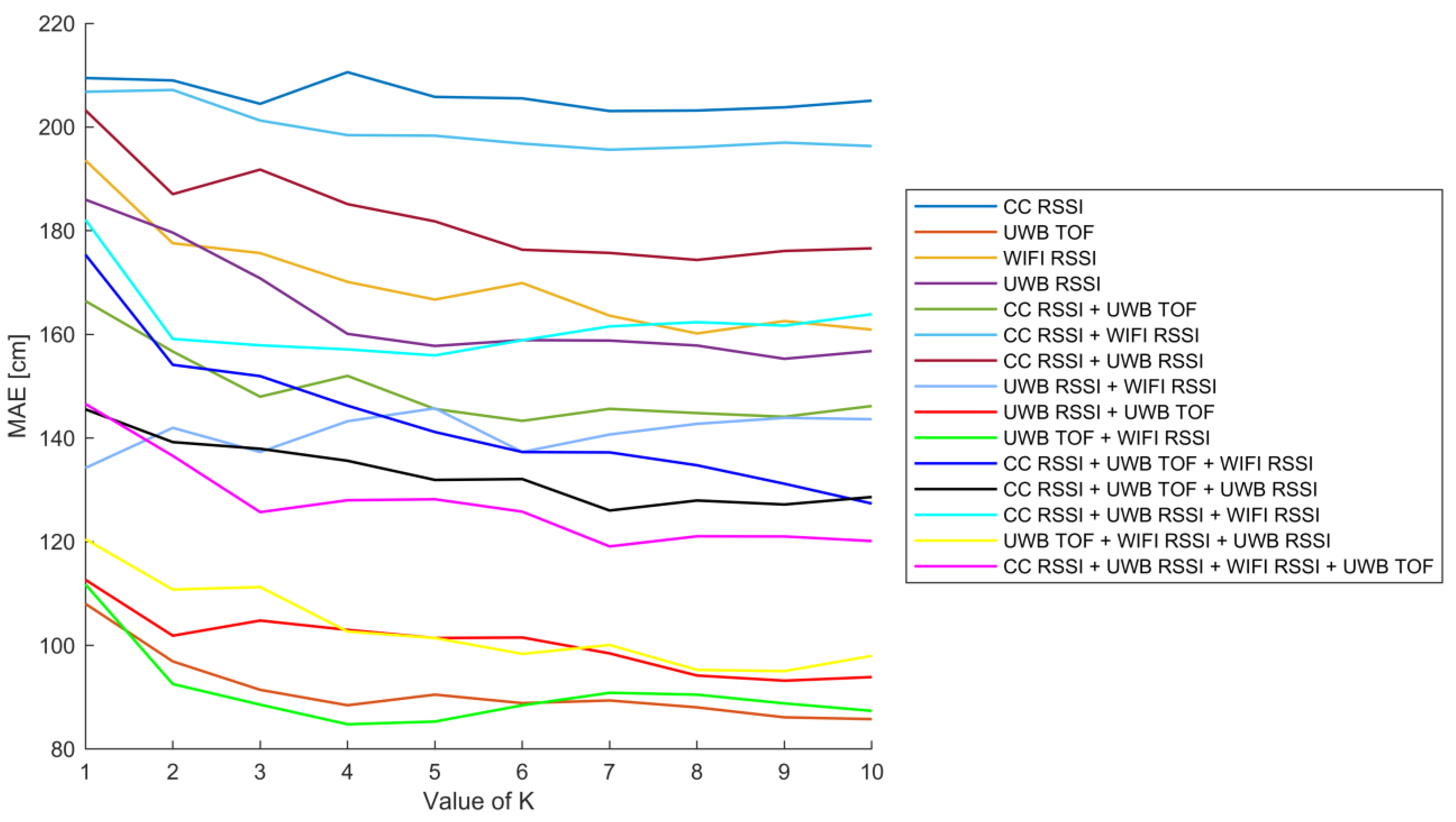
5.1. Results Using Weighted K-Nearest Neighbor
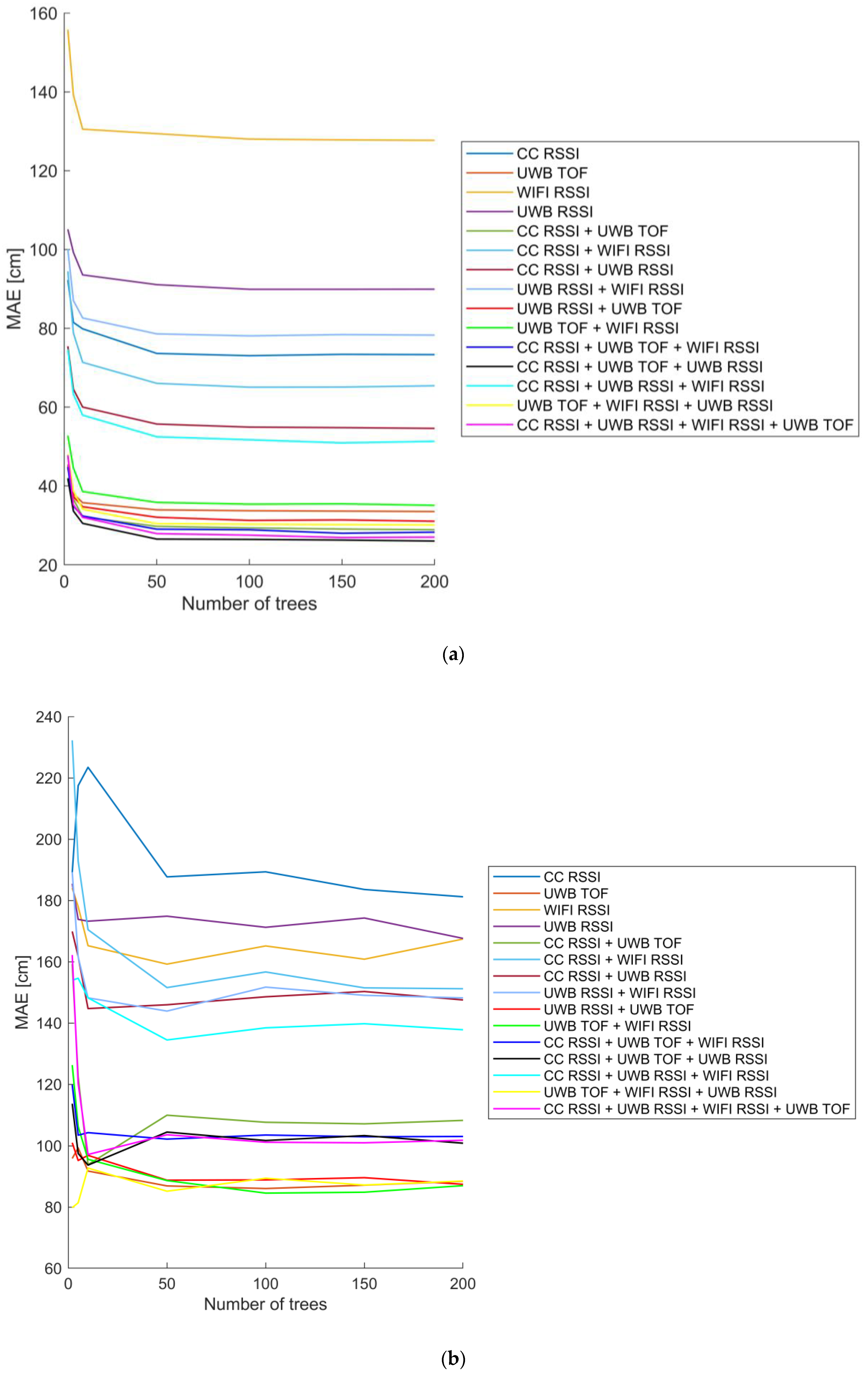
5.2. Results Using Random Forest
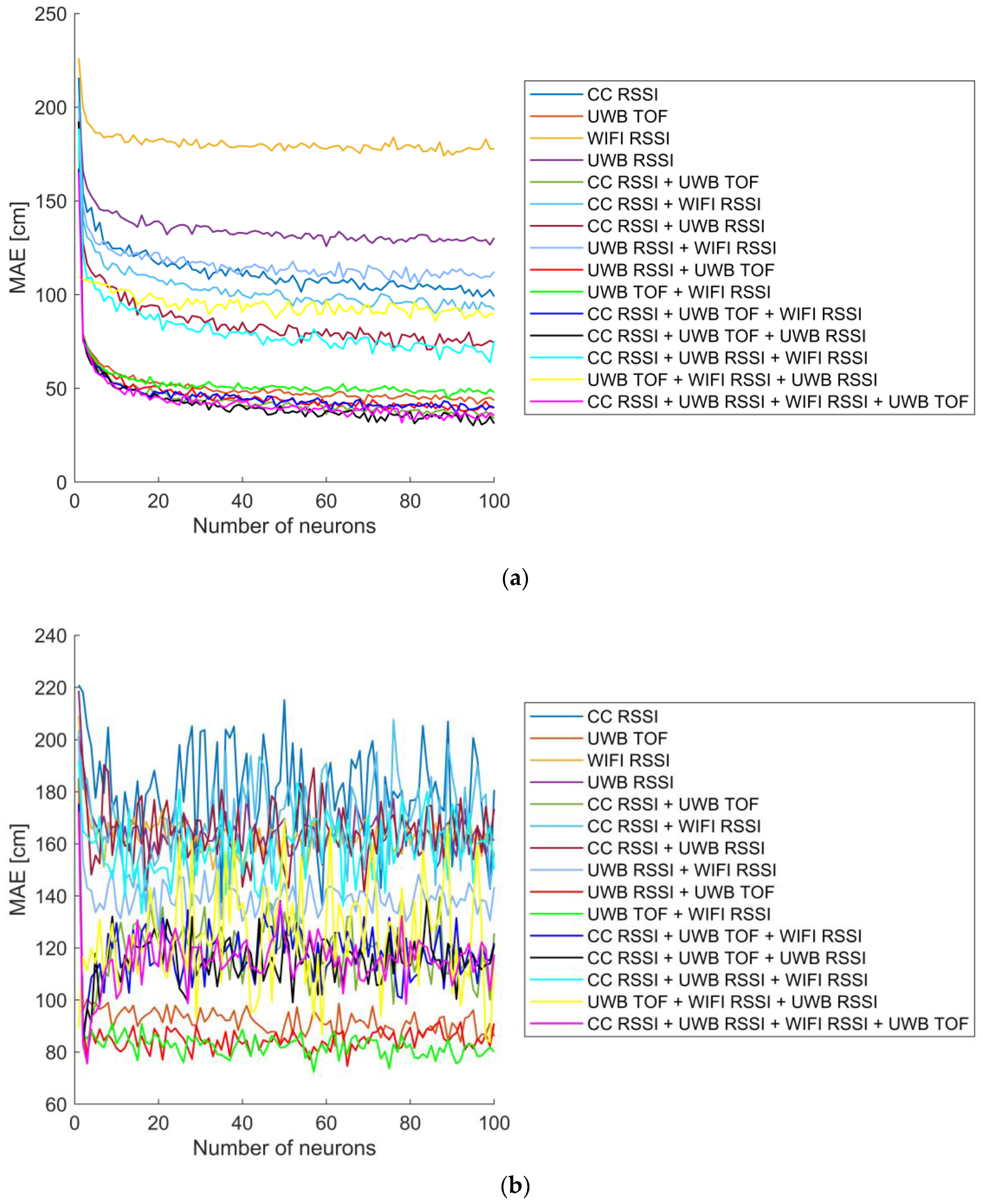
5.3. Results Using Artificial Neural Network
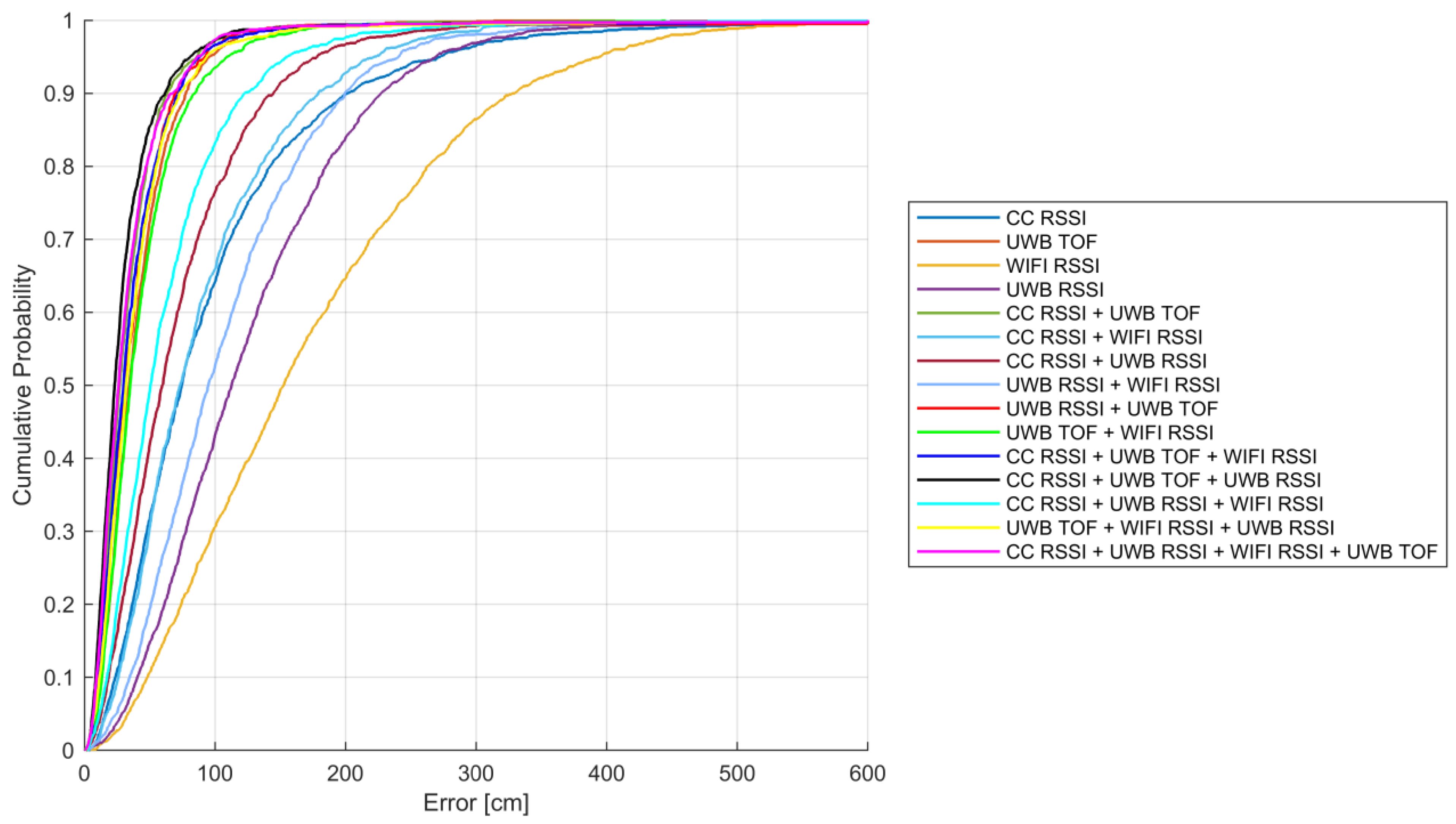
5.4. Comparison of Different Cases
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Asghari, P.; Rahmani, A.M.; Javadi, H.H.S. Internet of Things Applications: A Systematic Review. Comput. Netw. 2019, 148, 241–261. [Google Scholar] [CrossRef]
- Majid, M.; Habib, S.; Javed, A.R.; Rizwan, M.; Srivastava, G.; Gadekallu, T.R.; Lin, J.C.-W. Applications of Wireless Sensor Networks and Internet of Things Frameworks in the Industry Revolution 4.0: A Systematic Literature Review. Sensors 2022, 22, 2087. [Google Scholar] [CrossRef] [PubMed]
- Mao, G.; Fidan, B.; Anderson, B.D.O. Wireless Sensor Network Localization Techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef] [Green Version]
- Mesmoudi, A.; Feham, M.; Labraoui, N. Wireless Sensor Networks Localization Algorithms: A Comprehensive Survey. IJCNC 2013, 5, 45–64. [Google Scholar] [CrossRef]
- Senouci, M.R.; Mellouk, A. Wireless Sensor Networks. In Deploying Wireless Sensor Networks; Elsevier: Amsterdam, The Netherlands, 2016; pp. 1–19. [Google Scholar]
- Chen, Y.; Li, X.; Ding, Y.; Xu, J.; Liu, Z. An Improved DV-Hop Localization Algorithm for Wireless Sensor Networks. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018. [Google Scholar]
- Paul, A.; Sato, T. Localization in Wireless Sensor Networks: A Survey on Algorithms, Measurement Techniques, Applications and Challenges. J. Sens. Actuator Netw. 2017, 6, 24. [Google Scholar] [CrossRef] [Green Version]
- Cheng, L.; Wu, C.; Zhang, Y.; Wu, H.; Li, M.; Maple, C. A Survey of Localization in Wireless Sensor Network. Int. J. Distrib. Sens. Netw. 2012, 8, 962523. [Google Scholar] [CrossRef]
- Han, G.; Jiang, J.; Zhang, C.; Duong, T.Q.; Guizani, M.; Karagiannidis, G.K. A Survey on Mobile Anchor Node Assisted Localization in Wireless Sensor Networks. IEEE Commun. Surv. Tutorials 2016, 18, 2220–2243. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A. A Review of Advanced Localization Techniques for Crowdsensing Wireless Sensor Networks. Sensors 2019, 19, 988. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Chen, W.; Xu, Y.; Ji, S. A New Indoor Positioning System Architecture Using GPS Signals. Sensors 2015, 15, 10074–10087. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Waadt, A.; Burnic, A.; Xu, D.; Kocks, C.; Bruck, G.H.; Jung, P. System Implementation Study on RSSI Based Positioning in UWB Networks. In Proceedings of the 2010 7th International Symposium on Wireless Communication Systems, York, UK, 19–22 September 2010; pp. 36–40. [Google Scholar]
- Silva, B.; Pang, Z.; Akerberg, J.; Neander, J.; Hancke, G. Experimental Study of UWB-Based High Precision Localization for Industrial Applications. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 280–285. [Google Scholar]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.; Al-Khalifa, H. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [Green Version]
- Mazhar, F.; Khan, M.G.; Sällberg, B. Precise Indoor Positioning Using UWB: A Review of Methods, Algorithms and Implementations. Wirel. Pers. Commun. 2017, 97, 4467–4491. [Google Scholar] [CrossRef]
- Li, G.; Geng, E.; Ye, Z.; Xu, Y.; Lin, J.; Pang, Y. Indoor Positioning Algorithm Based on the Improved RSSI Distance Model. Sensors 2018, 18, 2820. [Google Scholar] [CrossRef] [Green Version]
- Giovanelli, D.; Farella, E.; Fontanelli, D.; Macii, D. Bluetooth-Based Indoor Positioning Through ToF and RSSI Data Fusion. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Campana, F.; Pinargote, A.; Dominguez, F.; Pelaez, E. Towards an Indoor Navigation System Using Bluetooth Low Energy Beacons. In Proceedings of the 2017 IEEE Second Ecuador Technical Chapters Meeting (ETCM), Salinas, Ecuador, 16–20 October 2017; pp. 1–6. [Google Scholar]
- Mackensen, E.; Lai, M.; Wendt, T.M. Bluetooth Low Energy (BLE) Based Wireless Sensors. In Proceedings of the 2012 IEEE Sensors, Taipei, Taiwan, 28–31 October 2012; pp. 1–4. [Google Scholar]
- Zhou, J.; Shi, J. RFID Localization Algorithms and Applications—A Review. J. Intell. Manuf. 2009, 20, 695–707. [Google Scholar] [CrossRef]
- Tesoriero, R.; Tebar, R.; Gallud, J.A.; Lozano, M.D.; Penichet, V.M.R. Improving Location Awareness in Indoor Spaces Using RFID Technology. Expert Syst. Appl. 2010, 37, 894–898. [Google Scholar] [CrossRef]
- Dai, H.; Ying, W.; Xu, J. Multi-layer neural network for received signal strength-based indoor localization. IET Commun. 2016, 10, 717–723. [Google Scholar] [CrossRef]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy, K. Recurrent Neural Networks for Accurate RSSI Indoor Localization. IEEE Internet Things J. 2019, 6, 10639–10651. [Google Scholar] [CrossRef] [Green Version]
- Csik, D.; Odry, A.; Sarcevic, P. Comparison of RSSI-Based Fingerprinting Methods for Indoor Localization. In Proceedings of the IEEE International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 15–17 September 2022. [Google Scholar]
- Cui, W.; Liu, Q.; Zhang, L.; Wang, H.; Lu, X.; Li, J. A Robust Mobile Robot Indoor Positioning System Based on Wi-Fi. Int. J. Adv. Robot. Syst. 2020, 17, 172988141989666. [Google Scholar] [CrossRef] [Green Version]
- Poulose, A.; Han, D.S. Performance Analysis of Fingerprint Matching Algorithms for Indoor Localization. In Proceedings of the 2020 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Fukuoka, Japan, 19–21 February 2020; pp. 661–665. [Google Scholar]
- Dong, Z.; Wu, Y.; Sun, D. Data Fusion of the Real Time Positioning System Based on RSSI and TOF. In Proceedings of the 2013 5th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2013; pp. 503–506. [Google Scholar]
- Gogolak, L.; Pletl, S.; Kukolj, D. Indoor Fingerprint Localization in WSN Environment Based on Neural Network. In Proceedings of the 2011 IEEE 9th International Symposium on Intelligent Systems and Informatics, Subotica, Serbia, 8–10 September 2011; pp. 293–296. [Google Scholar]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lv, J. MaLoc: A Practical Magnetic Fingerprinting Approach to Indoor Localization Using Smartphones. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13 September 2014; pp. 243–253. [Google Scholar]
- Ouyang, G.; Abed-Meraim, K. A Survey of Magnetic-Field-Based Indoor Localization. Electronics 2022, 11, 864. [Google Scholar] [CrossRef]
- Hoeflinger, F.; Saphala, A.; Schott, D.J.; Reindl, L.M.; Schindelhauer, C. Passive Indoor-Localization Using Echoes of Ultrasound Signals. In Proceedings of the 2019 International Conference on Advanced Information Technologies (ICAIT), Yangon, Myanmar, 6–7 November 2019; pp. 60–65. [Google Scholar]
- Moutinho, J.N.; Araújo, R.E.; Freitas, D. Indoor Localization with Audible Sound—Towards Practical Implementation. Pervasive Mob. Comput. 2016, 29, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Rahman, A.B.M.M.; Li, T.; Wang, Y. Recent Advances in Indoor Localization via Visible Lights: A Survey. Sensors 2020, 20, 1382. [Google Scholar] [CrossRef] [Green Version]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Gradinaru, A.; Butean, A. A Comprehensive Survey of Indoor Localization Methods Based on Computer Vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef]
- Wang, Y.-T.; Peng, C.-C.; Ravankar, A.; Ravankar, A. A Single LiDAR-Based Feature Fusion Indoor Localization Algorithm. Sensors 2018, 18, 1294. [Google Scholar] [CrossRef] [Green Version]
- de Sá, A.O.; Nedjah, N.; de Macedo Mourelle, L. Distributed Efficient Localization in Swarm Robotic Systems Using Swarm Intelligence Algorithms. Neurocomputing 2016, 172, 322–336. [Google Scholar] [CrossRef]
- Al-Sadoon, M.A.G.; Asif, R.; Al-Yasir, Y.I.A.; Abd-Alhameed, R.A.; Excell, P.S. AOA Localization for Vehicle-Tracking Systems Using a Dual-Band Sensor Array. IEEE Trans. Antennas Propagat. 2020, 68, 6330–6345. [Google Scholar] [CrossRef]
- Cao, S.; Chen, X.; Zhang, X.; Chen, X. Combined Weighted Method for TDOA-Based Localization. IEEE Trans. Instrum. Meas. 2020, 69, 1962–1971. [Google Scholar] [CrossRef]
- Gao, M.; Yu, M.; Guo, H.; Xu, Y. Mobile Robot Indoor Positioning Based on a Combination of Visual and Inertial Sensors. Sensors 2019, 19, 1773. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Chen, W.; Zhu, L.; Su, Z.; Zhou, X.; Guan, Y.; Liu, G. A Study of Sensor-Fusion Mechanism for Mobile Robot Global Localization. Robotica 2019, 37, 1835–1849. [Google Scholar] [CrossRef]
- Jiang, P.; Chen, L.; Guo, H.; Yu, M.; Xiong, J. Novel Indoor Positioning Algorithm Based on Lidar/Inertial Measurement Unit Integrated System. Int. J. Adv. Robot. Syst. 2021, 18, 172988142199992. [Google Scholar] [CrossRef]
- Hashim, H.A. Exponentially stable observer-based controller for VTOL-UAVs without velocity measurements. Int. J. Control 2022. [Google Scholar] [CrossRef]
- Li, C.; Wang, S.; Zhuang, Y.; Yan, F. Deep Sensor Fusion Between 2D Laser Scanner and IMU for Mobile Robot Localization. IEEE Sens. J. 2021, 21, 8501–8509. [Google Scholar] [CrossRef]
- Hashim, H.A.; Eltoukhy, A.E.E. Landmark and IMU Data Fusion: Systematic Convergence Geometric Nonlinear Observer for SLAM and Velocity Bias. IEEE Trans. Intell. Transport. Syst. 2022, 23, 3292–3301. [Google Scholar] [CrossRef]
- Hashim, H.A.; Abouheaf, M.; Abido, M.A. Geometric Stochastic Filter with Guaranteed Performance for Autonomous Navigation Based on IMU and Feature Sensor Fusion. Control Eng. Pract. 2021, 116, 104926. [Google Scholar] [CrossRef]
- Abu-Mahfouz, A.M.; Hancke, G.P. Localised Information Fusion Techniques for Location Discovery in Wireless Sensor Networks. Int. J. Sens. Netw. 2018, 26, 12–25. [Google Scholar] [CrossRef] [Green Version]
- Meng, T.; Jing, X.; Yan, Z.; Pedrycz, W. A Survey on Machine Learning for Data Fusion. Inf. Fusion 2020, 57, 115–129. [Google Scholar] [CrossRef]
- Aguerri, I.E.; Zaidi, A. Distributed Variational Representation Learning. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 120–138. [Google Scholar] [CrossRef] [Green Version]
- Moldoveanu, M.; Zaidi, A. In-Network Learning for Distributed Training and Inference in Networks. In Proceedings of the 2021 IEEE Globecom Workshops (GC Wkshps), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Moldoveanu, M.; Zaidi, A. On In-Network Learning. A Comparative Study with Federated and Split Learning. In Proceedings of the 2021 IEEE 22nd International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Lucca, Italy, 27–30 September 27 2021; pp. 221–225. [Google Scholar]
- Retscher, G. Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies. Sensors 2020, 20, 5121. [Google Scholar] [CrossRef]
- Elmezughi, M.K.; Affullo, T.J.; Oyie, N.O. Performance Study of Path Loss Models at 14, 18, and 22 GHz in an Indoor Corridor Environment for Wireless Communications. SAIEE Afr. Res. J. 2021, 112, 32–45. [Google Scholar] [CrossRef]
- Bhupuak, W.; Tooprakai, S. Path Loss Comparison in 850 MHz and 1800 MHz Frequency Bands. In Proceedings of the 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 28 June–1 July 2016; pp. 1–4. [Google Scholar]
- Chriki, A.; Touati, H.; Snoussi, H. SVM-Based Indoor Localization in Wireless Sensor Networks. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 1144–1149. [Google Scholar]
- Ramesh, R.; Arunachalam, M.; Atluri, H.K.; Kumar, S.C.; Anand, S.V.R.; Arumugam, P.; Amrutur, B. LoRaWAN for Smart Cities: Experimental Study in a Campus Deployment. In LPWAN Technologies for IoT and M2M Applications; Elsevier: Amsterdam, The Netherlands, 2020; pp. 327–345. ISBN 978-0-12-818880-4. [Google Scholar]
- Kunhoth, J.; Karkar, A.; Al-Maadeed, S.; Al-Ali, A. Indoor Positioning and Wayfinding Systems: A Survey. Hum. Cent. Comput. Inf. Sci. 2020, 10, 18. [Google Scholar] [CrossRef]
- Mautz, R. Indoor Positioning Technologies. Habilitation Thesis, Swiss Federal Institute of Technology in Zürich, Zürich, Switzerland, 2012. [Google Scholar] [CrossRef]
- Liu, S.; De Lacerda, R.; Fiorina, J. WKNN Indoor Wi-Fi Localization Method Using k-Means Clustering Based Radio Mapping. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–5. [Google Scholar]
- Tagne Fute, E.; Nyabeye Pangop, D.-K.; Tonye, E. A New Hybrid Localization Approach in Wireless Sensor Networks Based on Particle Swarm Optimization and Tabu Search. Appl. Intell. 2022. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Typical Accuracy | Advantages | Disadvantages |
|---|---|---|---|
| WiFi | m | Low cost Big range | Interference with other technologies |
| RFID | dm–m | Low cost | Localization can be inaccurate |
| BLE | m | Low power consumption | Covers smaller area as WiFi Interference with other technologies |
| UWB | cm–m | Not affected by interference | Higher cost |
| Localization Algorithm | Parameters | Value |
|---|---|---|
| WKNN | Value of K | 1–10 |
| RF | Number of trees | 2/5/10/50/100/150/200 |
| Type of decision tree | regression | |
| Predictor selection | curvature | |
| ANN | Number of neurons | 1–100 |
| Training set ratio | 0.7 | |
| Validation set ratio | 0.3 | |
| Training function | Levenberg–Marquardt | |
| Maximum number of iterations | 5000 | |
| Performance function | MSE | |
| Performance goal | 0 |
| Technology | MAE ± STD | Value of “K” |
|---|---|---|
| CC RSSI | 203.09 ± 178.14 cm | 7 |
| UWB TOF | 85.77 ± 81.38 cm | 10 |
| WIFI RSSI | 160.18 ± 141.40 cm | 8 |
| UWB RSSI | 155.34 ± 88.26 cm | 9 |
| CC RSSI + UWB TOF | 143.32 ± 123.57 cm | 6 |
| CC RSSI + WIFI RSSI | 195.63 ± 185.26 cm | 7 |
| CC RSSI + UWB RSSI | 174.36 ± 140.70 cm | 8 |
| UWB RSSI + WIFI RSSI | 134.23 ± 94.40 cm | 1 |
| UWB RSSI + UWB TOF | 93.19 ± 74.49 cm | 9 |
| UWB TOF + WIFI RSSI | 84.78 ± 72.19 cm | 4 |
| CC RSSI + UWB TOF + WIFI RSSI | 127.37 ± 113.12 cm | 10 |
| CC RSSI + UWB TOF + UWB RSSI | 126.02 ± 107.55 cm | 7 |
| CC RSSI + UWB RSSI + WIFI RSSI | 155.95 ± 132.63 cm | 5 |
| WIFI RSSI + UWB TOF + UWB RSSI | 95.03 ± 69.85 cm | 9 |
| UWB RSSI + CC RSSI + UWB TOF + WIFI RSSI | 119.09 ± 100.22 cm | 7 |
| Technology | MAE ± STD (Training Data) | Number of Trees | MAE ± STD (Test Data) |
|---|---|---|---|
| CC RSSI | 73.33 ± 65.99 cm | 200 | 181.21 ± 101.16 cm |
| UWB TOF | 33.70 ± 28.88 cm | 100 | 86.07 ± 79.54 cm |
| WIFI RSSI | 129.40 ± 81.77 cm | 50 | 159.24 ± 116.33 cm |
| UWB RSSI | 89.93 ± 58.61 cm | 200 | 167.63 ± 107.12 cm |
| CC RSSI + UWB TOF | 32.16 ± 26.14 cm | 10 | 93.87 ± 69.87 cm |
| CC RSSI + WIFI RSSI | 65.42 ± 53.43 cm | 200 | 151.20 ± 117.65 cm |
| CC RSSI + UWB RSSI | 60.01 ± 46.85 cm | 10 | 144.73 ± 92.62 cm |
| UWB RSSI + WIFI RSSI | 78.60 ± 51.12 cm | 50 | 143.91 ± 98.75 cm |
| UWB RSSI + UWB TOF | 31.04 ± 25.87 cm | 200 | 87.44 ± 79.60 cm |
| UWB TOF + WIFI RSSI | 35.37 ± 28.36 cm | 100 | 84.57 ± 69.21 cm |
| CC RSSI + UWB TOF + WIFI RSSI | 29.03 ± 23.33 cm | 50 | 102.2 ± 79.30 cm |
| CC RSSI + UWB TOF + UWB RSSI | 30.50 ± 26.05 cm | 10 | 93.71 ± 67.02 cm |
| CC RSSI + UWB RSSI + WIFI RSSI | 54.48 ± 38.47 cm | 50 | 134.48 ± 93.38 cm |
| WIFI RSSI + UWB TOF + UWB RSSI | 48.03 ± 40.94 cm | 2 | 79.84 ± 60.65 cm |
| UWB RSSI + CC RSSI + UWB TOF + WIFI RSSI | 32.04 ± 24.95 cm | 10 | 97.18 ± 69.96 cm |
| Technology | MAE ± STD (Test Data) | Number of Neurons | MAE ± STD (Training Data) |
|---|---|---|---|
| CC RSSI | 175.12 ± 127.68 cm | 97 | 98.83 ± 85.83 cm |
| UWB TOF | 84.41 ± 60.95 cm | 96 | 41.69 ± 31.12 cm |
| WIFI RSSI | 159.87 ± 115.15 cm | 88 | 174.04 ± 106.96 cm |
| UWB RSSI | 161.63 ± 102.12 cm | 60 | 125.8 ± 75.15 cm |
| CC RSSI + UWB TOF | 125.66 ± 95.35 cm | 100 | 34.09 ± 27.26 cm |
| CC RSSI + WIFI RSSI | 144.16 ± 99.54 cm | 86 | 90.03 ± 66.20 cm |
| CC RSSI + UWB RSSI | 174.38 ± 119.63 cm | 84 | 70.78 ± 52.08 cm |
| UWB RSSI + WIFI RSSI | 148.30 ± 85.59 cm | 82 | 106.20 ± 67.09 cm |
| UWB RSSI + UWB TOF | 80.93 ± 62.77 cm | 93 | 37.89 ± 27.51 cm |
| UWB TOF + WIFI RSSI | 85.08 ± 62.54 cm | 89 | 44.53 ± 31.87 cm |
| CC RSSI + UWB TOF + WIFI RSSI | 131.50 ± 98.55 cm | 91 | 36.87 ± 28.24 cm |
| CC RSSI + UWB TOF + UWB RSSI | 117.24 ± 86.45 cm | 95 | 30.23 ± 23.32 cm |
| CC RSSI + UWB RSSI + WIFI RSSI | 133.24 ± 82.65 cm | 99 | 63.77 ± 48.43 cm |
| WIFI RSSI + UWB TOF + UWB RSSI | 167.00 ± 118.35 cm | 66 | 38.86 ± 28.55 cm |
| UWB RSSI + CC RSSI + UWB TOF + WIFI RSSI | 132.21 ± 87.94 cm | 78 | 31.68 ± 25.30 cm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Csik, D.; Odry, Á.; Sarcevic, P. Fingerprinting-Based Indoor Positioning Using Data Fusion of Different Radiocommunication-Based Technologies. Machines 2023, 11, 302. https://doi.org/10.3390/machines11020302
Csik D, Odry Á, Sarcevic P. Fingerprinting-Based Indoor Positioning Using Data Fusion of Different Radiocommunication-Based Technologies. Machines. 2023; 11(2):302. https://doi.org/10.3390/machines11020302
Chicago/Turabian StyleCsik, Dominik, Ákos Odry, and Peter Sarcevic. 2023. "Fingerprinting-Based Indoor Positioning Using Data Fusion of Different Radiocommunication-Based Technologies" Machines 11, no. 2: 302. https://doi.org/10.3390/machines11020302