
Prony Method Estimation as a New Approach for Surge Comparison Testing in Turn Insulation Diagnostics for Three Phase Stator Windings
 , ,
, ,
Abstract
:
1. Introduction
2. Surge Comparison Test Overview
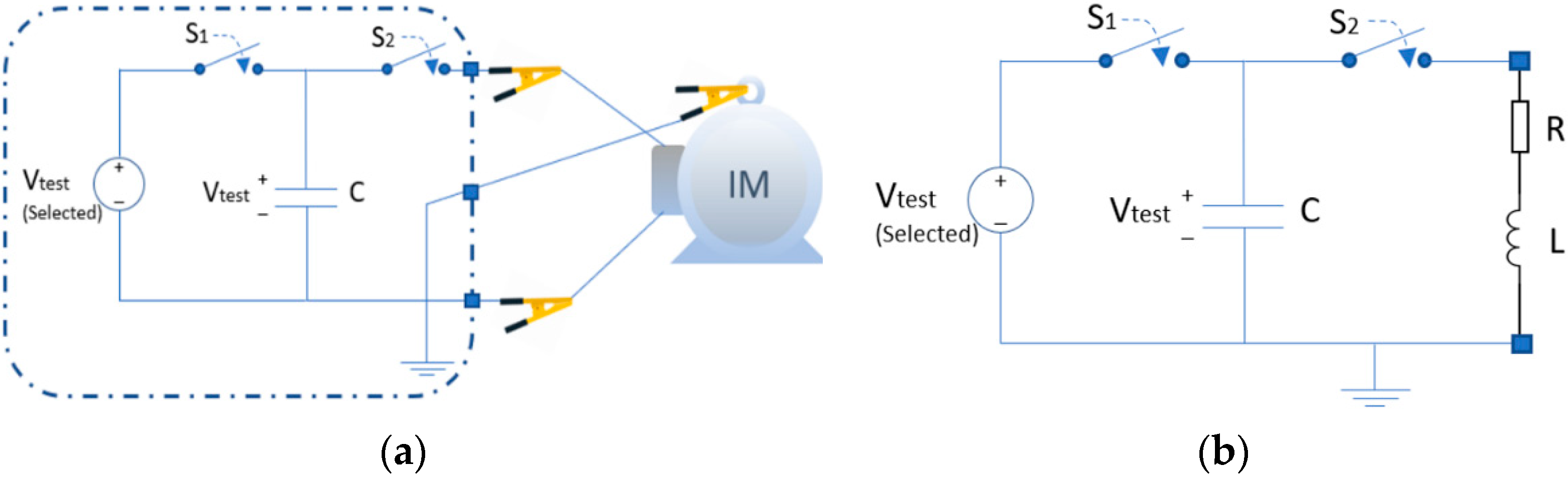
2.1. Surge Testing Fundamentals
2.2. Analytical Method (Error Area Ratio)
3. Prony Method for Surge Comparison Testing Application
- (1)
- The sampling frequency (fs), sampling time (Ts), and length of the signal under analysis (L) must be known, as well as the order (p) of the linear prediction model (LPM), where an initial value of p for the surge signal measurement for analysis must be selected, starting with p = 1, then p = 2… L.
- (2)
- A Toeplitz matrix “” with the data of the surge signal “y(t)” must be defined as (5).
- (3)
- A vector “” (coefficients of characteristic polynomial) using (5) is calculated in (6).
- (4)
- Calculate the roots from vector ““, and the resulting roots vector ““ will be used in (7) and (8) to calculate damping:and frequency:
- (5)
- Obtain vandermonde matrix “Z” of vector “” using (9).
- (6)
- Obtain vector “h” in (10) using vandermonde matrix “Z” and signal vector “”.
- (7)
- The resulting vector “h” obtained in (10) will be used in (11) and (12) to calculate amplitude and phase angle.
4. Study Case for Surge Signal Analysis Using Prony Method Estimation
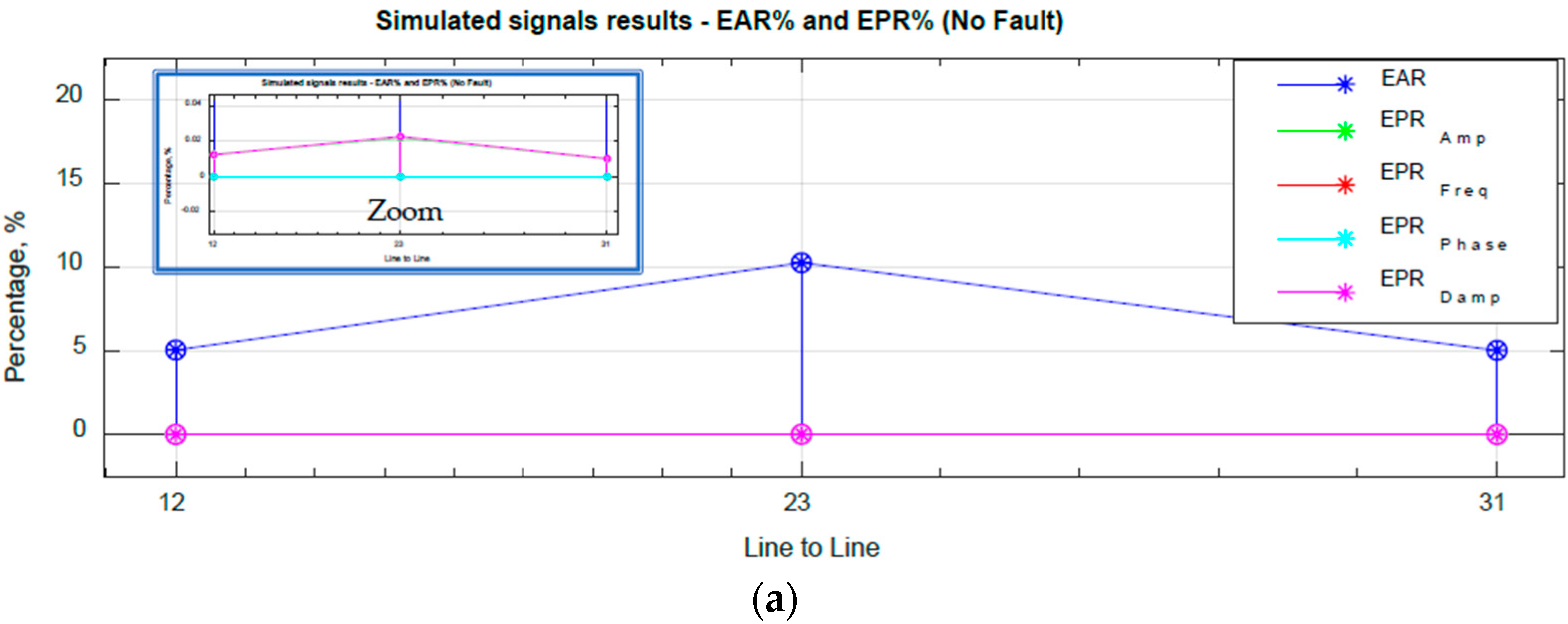
4.1. Assessment of Numerical Simulation of Surge Signals
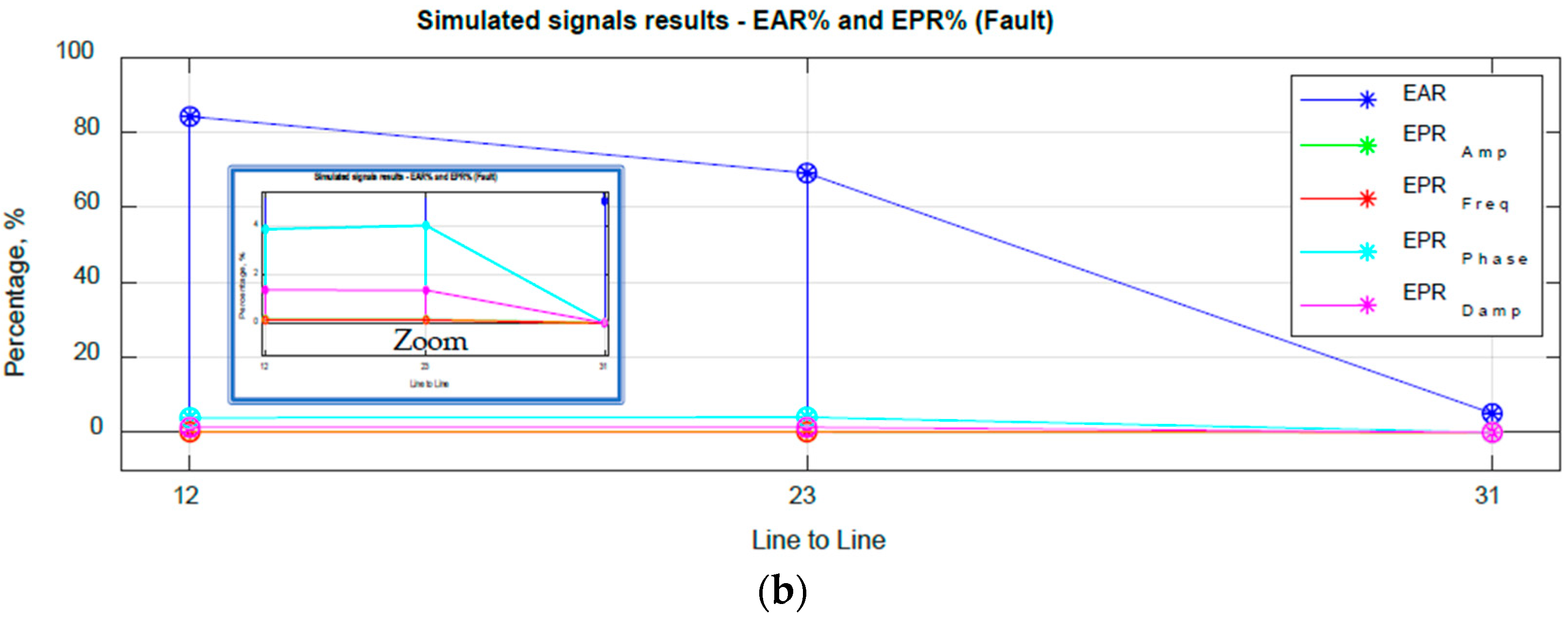
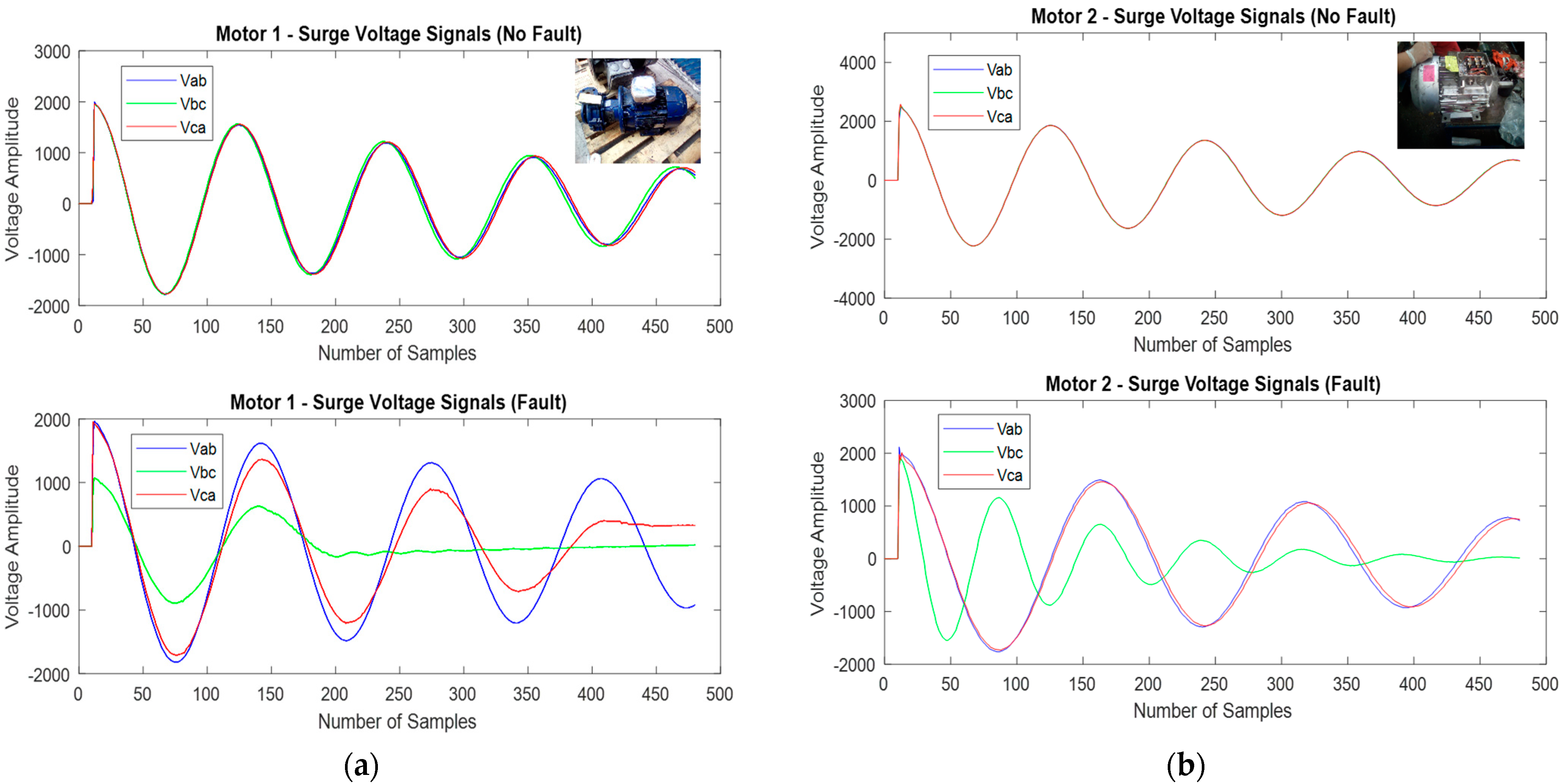
4.2. Assessment of Real Surge Signals from Tested Motor Windings
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Definition |
| EAR | Error Area Ratio |
| SCT | Surge Comparison Test |
| ZCT | Zero Crossing Time |
| WT | Wavelet Transform |
| ANN | Artificial Neural Network |
| GLRT | Generalized Likelihood Ratio Test |
| MLE | Maximum Likelihood Estimation |
| LPM | Linear Prediction Model |
| MSE | Mean Square Error |
| EDH | Estimated Dominant Harmonic |
| EPR | Error Parameter Ratio |
References
- SKF Static Motor Analyzer Baker DX User Manual, SKF Baker Instrument Company, Fort Collins, CO, USA. Available online: https://www.perel.fi/files/item/103962038/pub-cm-71-030vi-en-baker-dx-user-manual.pdf (accessed on 30 November 2022).
- Dc step-voltage and surge testing of motors. SKF Baker Instrument Company, Fort Collins, CO, USA. Available online: https://fdocuments.in/document/dc-step-voltage-and-surge-testings-of-motors.html (accessed on 30 November 2022).
- Stone, G.C.; Boulter, E.A.; Culbert, I.; Dhirani, H. Off-line rotor and stator winding tests. In Electrical Insulation for Rotating Machines–Design, Evaluation, Aging, Testing, and Repair, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA; Wiley-IEEE Press: Hoboken, NJ, USA, 2014; pp. 363–367. [Google Scholar]
- Wiedenbrug, E.; Frey, G.; Wilson, J. Impulse testing as a predictive maintenance tool. In Proceedings of the 2003 4th IEEE Int. Symp. on Diagnostics for Electric Machines, Power Electronics and Drives, Atlanta, GA, USA, 24–26 August 2003. [Google Scholar] [CrossRef]
- Narang, A.; Gupta, B.K.; Dick, E.P.; Sharma, D. Measurement and analysis of surge distribution in motor stator windings. IEEE Trans. Energy Convers. 1989, 4, 126–134. [Google Scholar] [CrossRef]
- Grubic, S.; Restrepo, J.; Habetler, T.G. Sensitivity Analysis of the Surge Test Applied to AC Machines. In Proceedings of the 2011 IEEE Int. Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada; May 2011. [Google Scholar] [CrossRef]
- Nakamura, H. Diagnosis of Short-Circuit Faults in Stator Winding Inside Low-Voltage Induction Motor Using Impulse Voltage Test. Electr. Eng. Jpn. 2015, 191, 915–921. [Google Scholar] [CrossRef]
- Ukila, A.; Chenb, S.; Andennaa, A. Detection of stator short circuit faults in three-phase induction motors using motor current zero crossing instants. Electr. Power Syst. Res. 2011, 81, 1036–1044. [Google Scholar] [CrossRef]
- Gketsis, Z.E.; Zervakis, M.E.; Stavrakakis, G. Detection and classification of winding faults in windmill generators using Wavelet Transform and ANN. Electr. Power Syst. Res. 2009, 79, 1483–1494. [Google Scholar] [CrossRef]
- Guedes, A.S.; Silva, S.M.; Filho, B.; de, J.C.; Conceição, C.A. Evaluation of electrical insulation in three-phase induction motors and classification of failures using neural networks. Electr. Power Syst. Res. 2016, 140, 263–273. [Google Scholar] [CrossRef]
- Tallam, R.M.; Habetler, T.G.; Harley, R.G. Transient model for induction machines with stator winding turn faults. IEEE Trans. Ind. Appl. 2002, 38, 632–637. [Google Scholar] [CrossRef]
- Grubic, S.; Restrepo, J.; Habetler, T.G. A new concept for online surge testing for the detection of winding insulation deterioration in low voltage induction machines. IEEE Trans. Ind. Appl. 2011, 45, 2051–2058. [Google Scholar] [CrossRef]
- Li, X.; Xu, Y.; Li, N.; Yang, B.; Lei, Y. Remaining Useful Life Prediction With Partial Sensor Malfunctions Using Deep Adversarial Networks. IEEE/CAA J. Autom. Sin. 2023, 10, 121–134. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, Z.; Li, X. Blockchain-based decentralized federated transfer learning methodology for collaborative machinery fault diagnosis. Reliab. Eng. Syst. Saf. J. 2023, 229, 108885. [Google Scholar] [CrossRef]
- Gaerke, T.; Lang, N. A Problematic Field Experience Using Surge Testing. In Proceedings of the 2020 IEEE Electrical Insulation Conf. (EIC), Knoxville, TN, USA, 22 June–3 July 2020. [Google Scholar] [CrossRef]
- Galea, M.; Giangrande, P.; Madonna, V.; Buticchi, G. Reliability-Oriented Design of Electrical Machines: The Design Process for Machines’ Insulation Systems MUST Evolve. IEEE Ind. Electron. Mag. 2020, 14, 20–28. [Google Scholar] [CrossRef]
- Wiedenbrug, E.; Frey, G.; Wilson, J. Impulse Testing And Turn Insulation Deterioration In Electric Motors. In Proceedings of the 2003 IEEE Conf. Rec. of Annual Pulp and Paper Industry Tech. Conf., Charleston, SC, USA, 16–20 June 2003. [Google Scholar] [CrossRef]
- Baranski, M.; Decner, A.; Polak, A. Selected Diagnostic Methods of Electrical Machines Operating in Industrial Conditions. IEEE Trans. Dielectr. Electr. Insul. 2014, 21, 2047–2054. [Google Scholar] [CrossRef]
- Ojaghi, M.; Sabouri, M.; Faiz, J. Diagnosis methods for stator winding faults in three-phase squirrel-cage induction motors. Int. Trans. Electr. Energy Syst. 2013, 24, 891–912. [Google Scholar] [CrossRef]
- Surge Comparison Tests Pass/Fail Recommendations. Available online: https://electrominst.com/wp-content/uploads/2016/08/Surge-Test-Pass-Fail-Recommendations-06072016R4.pdf (accessed on 30 November 2022).
- IEEE Std 522-2004; IEEE Guide for Testing Turn Insulation of Form-Wound Stator Coils for Alternating-Current Electric Machines. IEEE: Piscataway, NJ, USA, 2004; pp. 1–28. [CrossRef]
- Lobos, T.; Reziner, J.; Schegner, P. Parameter estimation of distorted signals using Prony method. In Proceedings of the 2003 IEEE Bologna Power Tech Conference Proceedings, Italy, Bologna, Italy, 23–26 June 2003. [Google Scholar] [CrossRef]
- Leonowicz, Z.; Lobos, T.; Rezmer, J. Advanced Spectrum Estimation Methods for Signal Analysis in Power Electronics. IEEE Trans. Ind. Electr. 2003, 50, 514–519. [Google Scholar] [CrossRef]
- Wrocław University of Science and Technology Digital Library. Parametric Methods for Time–Frequency Analysis of Electric Signals. Available online: https://www.dbc.wroc.pl/dlibra/publication/1877/edition/2021?language=pl (accessed on 30 November 2022).
- Qi, L.; Qian, L.; Woodruff, S.; Cartes, D. Prony Analysis for Power System Transients. EURASIP J. Adv. Signal Process. 2007, 2007, 048406-170. [Google Scholar] [CrossRef] [Green Version]
- Meunier, M.; Brouaye, F. Fourier transform, Wavelets, Prony Analysis: Tools for Harmonics and Quality of Power. In Proceedings of the 8th Int. Conf. on Harmonics and Quality of Power ICHQP’98, Greece, Athens, Greece, 14–16 October 1998. [Google Scholar] [CrossRef]
- Johnson, M.A.; Zarafonitis, I.P.; Calligaris, M. Prony analysis and power system stability-some recent theoretical and applications research. In Proceedings of the 2000 Power Engineering Society Summer Meeting, USA, Seattle, WA, USA, 16–20 July 2000. [Google Scholar] [CrossRef]
- Castillo, R.; Ramírez, J.R.; Alonso, G.; Ortiz-Villafuerte, J. Prony’s method application for BWR instabilities characterization. Nucl. Eng. Des. J. Elsevier 2014, 284, 67–73. [Google Scholar] [CrossRef]
- Trujillo Guajardo, L.A. Prony filter vs conventional filters for distance protection relays: An evaluation. Electr. Power Syst. Res. 2016, 137, 163–174. [Google Scholar] [CrossRef]
- Guajardo, L.A.T.; Enríquez, A.C.; Ospina, G.M.I. Prony method implementation in distance relays to mitigate the effect of series-compensated transmission lines. Springer Electr. Eng. 2016, 99, 227–239. [Google Scholar] [CrossRef]
- Trujillo Guajardo, L.A. Relevador De Protección De Distancia Con Estimador Fasorial De Prony (MX Patent No. 351620 B). México Patent Office, Instituto Mexicano de la Propiedad Industrial, IMPI. 2017. Available online: https://vidoc.impi.gob.mx/visor?usr=SIGA&texp=SI&tdoc=E&id=MX/a/2014/012486 (accessed on 27 January 2023).
- Ahn, S.; Koh, J. RCS Prediction Using Prony Method in High-Frequency Band for Military Aircraft Models. Aerospace 2022, 9, 734. [Google Scholar] [CrossRef]
- Trujillo Guajardo, L.A.; Platas Garza, M.A.; Rodríguez Maldonado, J.; González Vázquez, M.A.; Rodríguez Alfaro, L.H.; Salinas Salinas, F. Prony Method Estimation for Motor Current Signal Analysis Diagnostics in Rotor Cage Induction Motors. Energies 2022, 15, 3513. [Google Scholar] [CrossRef]
- Ribeiro, P.F.; Duque, C.A.; Ribeiro, P.M.; Cerqueira, A.S. Spectral Estimation. In Power Systems Signal Processing for Smart Grids, 1st ed.; Wiley: London, UK, 2014; pp. 254–270. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | No Fault Scenario | Fault Scenario |
|---|---|---|
| Overall Resistance, R (Ω) | 280 | 280 |
| Winding Inductance, Lab, Lbc, Lca (mH) | 10.5, 10.4, 10.6 | 10.5, 12.4, 10.6 |
| Surge Capacitance, C1 (µF) | 0.0045 | 0.0045 |
| Test Voltage, Vtest (V) | 2500 | 2500 |
| Switching frequency S1, S2 (Hz) | 1000 | 1000 |
| Simulation time step, (Sec) | 0.0000001 | 0.0000001 |
| %Ratiorea Ratio | No Fault Scenario | Fault Scenario |
|---|---|---|
| EAR 12 | 5.09 | 84.20 |
| EAR 23 | 10.29 | 69.14 |
| EAR 31 | 5.07 | 5.07 |
| Estimated Signal Parameters | No Fault | Fault | Signals |
|---|---|---|---|
| Frequency (Hz) | 23,008.02 | 23,008.02 | Vab |
| 23,010.90 | 22,971.12 | Vbc | |
| 23,005.68 | 23,005.68 | Vca | |
| Amplitude | 2500.31 | 2500.31 | Vab |
| 2500.31 | 2503.60 | Vbc | |
| 2500.31 | 2500.31 | Vca | |
| Phase (rad) | −0.133099 | −0.133099 | Vab |
| −0.133099 | −0.127911 | Vbc | |
| −0.133099 | −0.133099 | Vca | |
| Damping | −13,205.63 | −13,205.63 | Vab |
| −13,207.28 | −13,387.39 | Vbc | |
| −13,204.29 | −13,204.29 | Vca |
| Estimated Signal Parameters | EPR (%) | ||
|---|---|---|---|
| No Fault | Fault | Lines | |
| Frequency (Hz) | 0.0125 | 0.1603 | L1-L2 |
| 0.022 | 0.1504 | L2-L3 | |
| 0.0101 | 0.0101 | L3-L1 | |
| Amplitude | 0 | 0.1315 | L1-L2 |
| 0 | 0.1314 | L2-L3 | |
| 0 | 0 | L3-L1 | |
| Phase (rad) | 0 | 3.8978 | L1-L2 |
| 0 | 4.0559 | L2-L3 | |
| 0 | 0 | L3-L1 | |
| Damping | 0.0124 | 1.3763 | L1-L2 |
| 0.0226 | 1.3677 | L2-L3 | |
| 0.0101 | 0.0101 | L3-L1 | |
| %Error Area Ratio (Line-Line) | Motor 1 | |
| Fault | No Fault | |
| EAR 12 | 43.68 | 7.32 |
| EAR 23 | 27.91 | 18.62 |
| EAR 31 | 74.41 | 11.65 |
| %Error Area Ratio (Line-Line) | Motor 2 | |
| Fault | No Fault | |
| EAR 12 | 8.46 | 0.32 |
| EAR 23 | 100 | 1.33 |
| EAR 31 | 100 | 1.37 |
| Motor 1 | ||||||
| Estimated Signal Parameters | Vab | Vbc | Vca | |||
| No Fault | Fault | No Fault | Fault | No Fault | Fault | |
| Frequency (Hz) | 87,184.44 | 75,122.01 | 87,865.04 | 58,589.55 | 86,675.02 | 65,113.59 |
| Amplitude | 2048.09 | 1904.94 | 2074.11 | 547.82 | 2035.44 | 1723.16 |
| Phase (rad) | 0.05412 | 0.38390 | 0.05108 | 1.15806 | 0.07228 | 1.18490 |
| Damping | −23,663.52 | −19,266.73 | −22,949.13 | −68,487.07 | −22,676.50 | −35,561.65 |
| MSE Curve fitting | 5.40 × 10−20 | 3.34 × 10−20 | 7.55 × 10−20 | 1.46 × 10−21 | 1.86 × 10−20 | 6.10 × 10−20 |
| Motor 2 | ||||||
| Estimated Signal Parameters | Vab | Vbc | Vca | |||
| No Fault | Fault | No Fault | Fault | No Fault | Fault | |
| Frequency (Hz) | 85,827.35 | 64,832.14 | 85,918.12 | 131,426.95 | 86,016.30 | 64,095.47 |
| Amplitude | 2649.04 | 2083.44 | 2627.71 | 2530.11 | 2626.54 | 2022.63 |
| Phase (rad) | 0.09899 | 0.07828 | 0.10249 | 0.00033 | 0.07274 | 0.093057 |
| Damping | −28,408.73 | −21,322.28 | −28,326.12 | −90,076.64 | −28,390.32 | −20,809.97 |
| MSE Curve fitting | 5.47 × 10−20 | 6.96 × 10−20 | 3.64 × 10−20 | 6.56 × 10−21 | 4.57 × 10−20 | 1.23 × 10−20 |
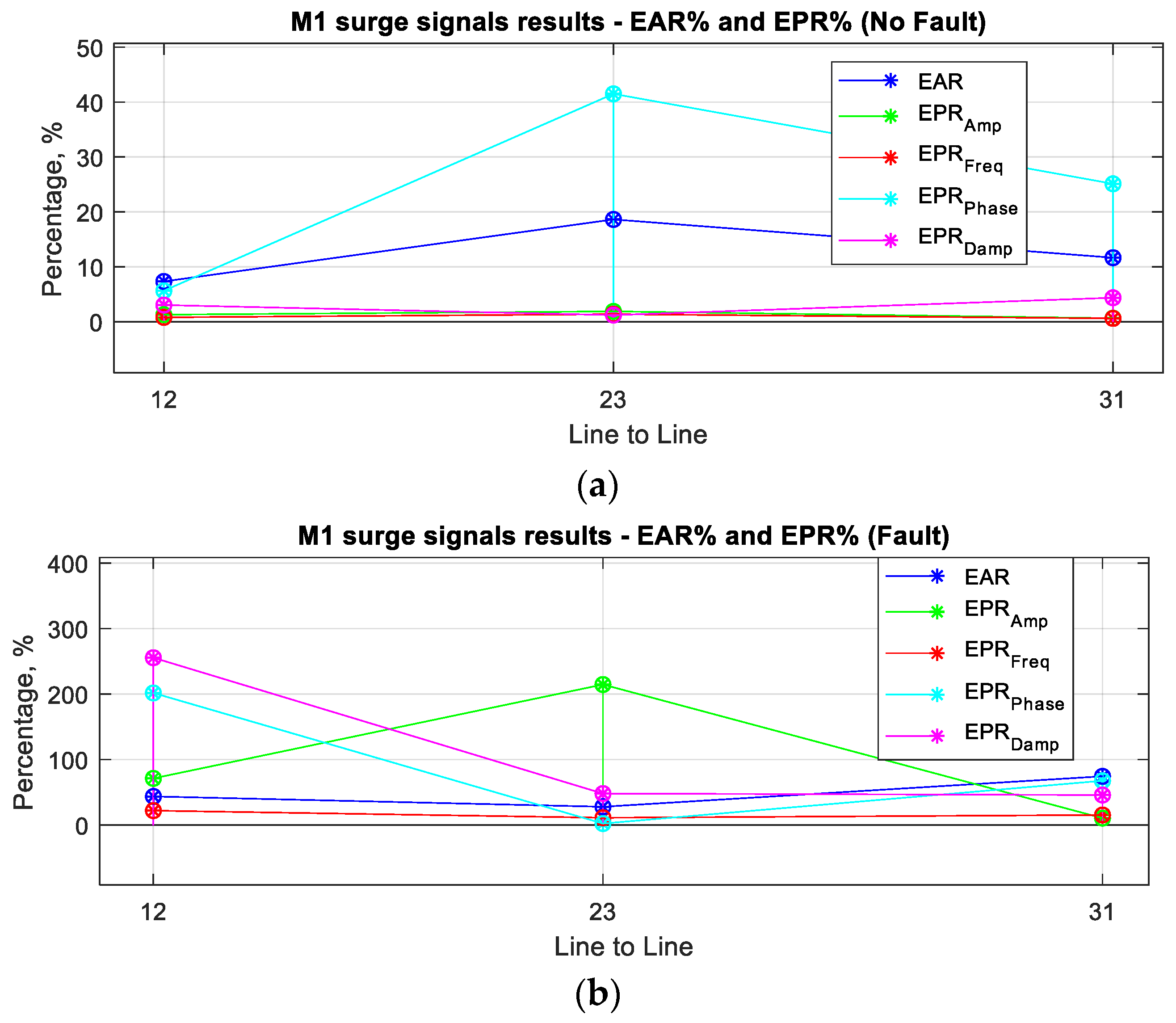
| Motor 1 | ||||||
| Estimated Signal Parameters | EPR L-L, (%) 1-2 | EPR L-L, (%) 2-3 | EPR L-L, (%) 3-1 | |||
| No Fault | Fault | No Fault | Fault | No Fault | Fault | |
| Frequency (Hz) | 0.7806 | 22.007 | 1.3543 | 11.135 | 0.5877 | 15.370 |
| Amplitude | 1.2707 | 71.241 | 1.8644 | 214.54 | 0.6212 | 10.549 |
| Phase (rad) | 5.6289 | 201.65 | 41.502 | 2.3172 | 25.114 | 67.600 |
| Damping | 3.0189 | 255.46 | 1.1879 | 48.075 | 4.3525 | 45.821 |
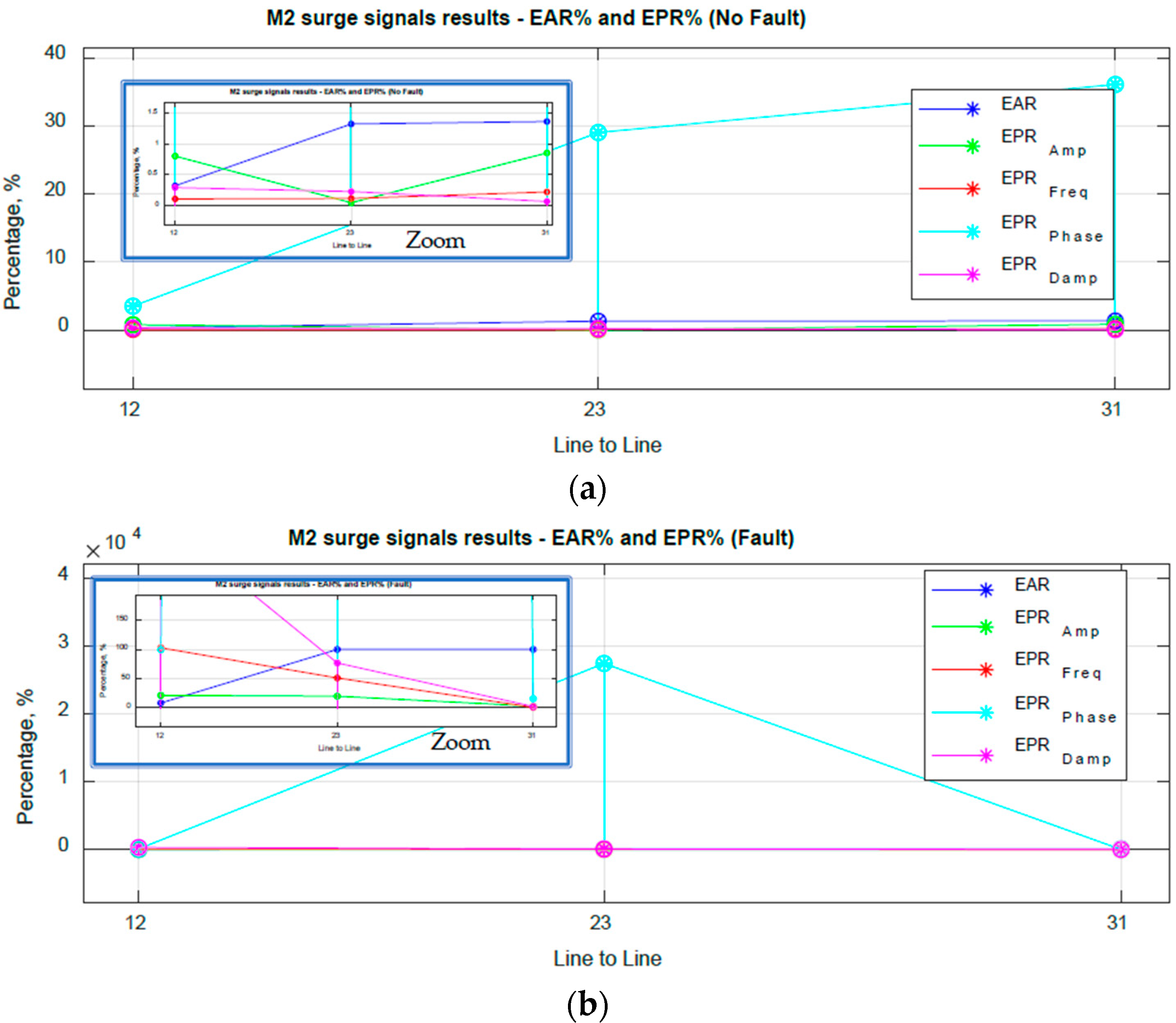
| Motor 2 | ||||||
| Estimated Signal Parameters | EPR L-L, (%) 1-2 | EPR L-L, (%) 2-3 | EPR L-L, (%) 3-1 | |||
| No Fault | Fault | No Fault | Fault | No Fault | Fault | |
| Frequency (Hz) | 0.1057 | 102.71 | 0.1142 | 51.231 | 0.2196 | 1.1493 |
| Amplitude | 0.8052 | 21.439 | 0.0445 | 20.057 | 0.8567 | 3.0062 |
| Phase (rad) | 3.5354 | 99.569 | 29.020 | 27,482.09 | 36.073 | 15.878 |
| Damping | 0.2907 | 322.45 | 0.2266 | 76.897 | 0.0648 | 2.4618 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trujillo Guajardo, L.A.; Rodríguez Alfaro, L.H.; Rodríguez Maldonado, J.; González Vázquez, M.A.; Salinas Salinas, F.; Shih, M.Y. Prony Method Estimation as a New Approach for Surge Comparison Testing in Turn Insulation Diagnostics for Three Phase Stator Windings. Machines 2023, 11, 241. https://doi.org/10.3390/machines11020241
Trujillo Guajardo LA, Rodríguez Alfaro LH, Rodríguez Maldonado J, González Vázquez MA, Salinas Salinas F, Shih MY. Prony Method Estimation as a New Approach for Surge Comparison Testing in Turn Insulation Diagnostics for Three Phase Stator Windings. Machines. 2023; 11(2):241. https://doi.org/10.3390/machines11020241
Chicago/Turabian StyleTrujillo Guajardo, Luis Alonso, Luis Humberto Rodríguez Alfaro, Johnny Rodríguez Maldonado, Mario Alberto González Vázquez, Fernando Salinas Salinas, and Meng Yen Shih. 2023. "Prony Method Estimation as a New Approach for Surge Comparison Testing in Turn Insulation Diagnostics for Three Phase Stator Windings" Machines 11, no. 2: 241. https://doi.org/10.3390/machines11020241