
Deformable Object Manipulation in Caregiving Scenarios: A Review


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
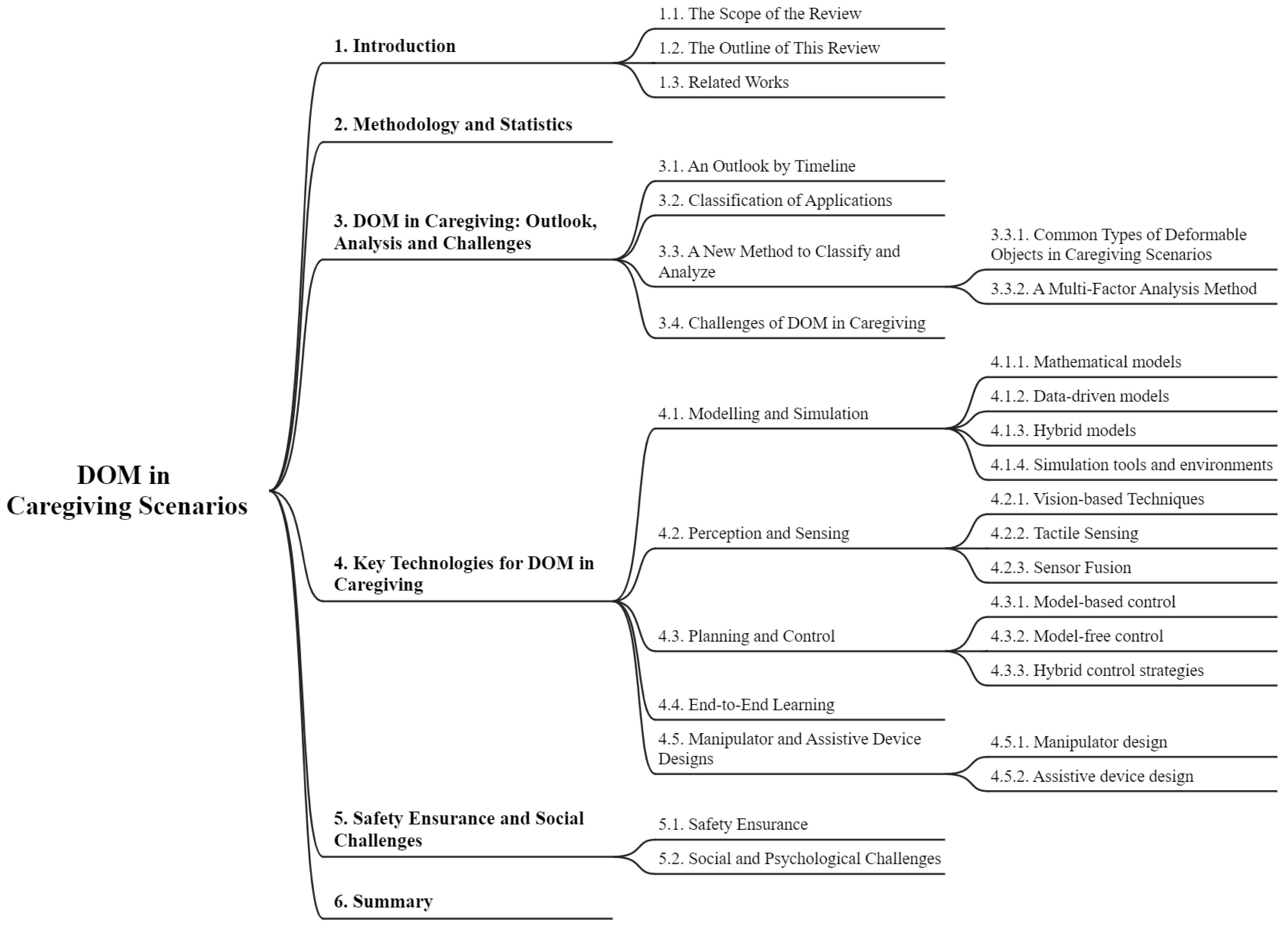
:1. Introduction
1.1. The Scope of the Review
1.2. The Outline of This Review
1.3. Related Works
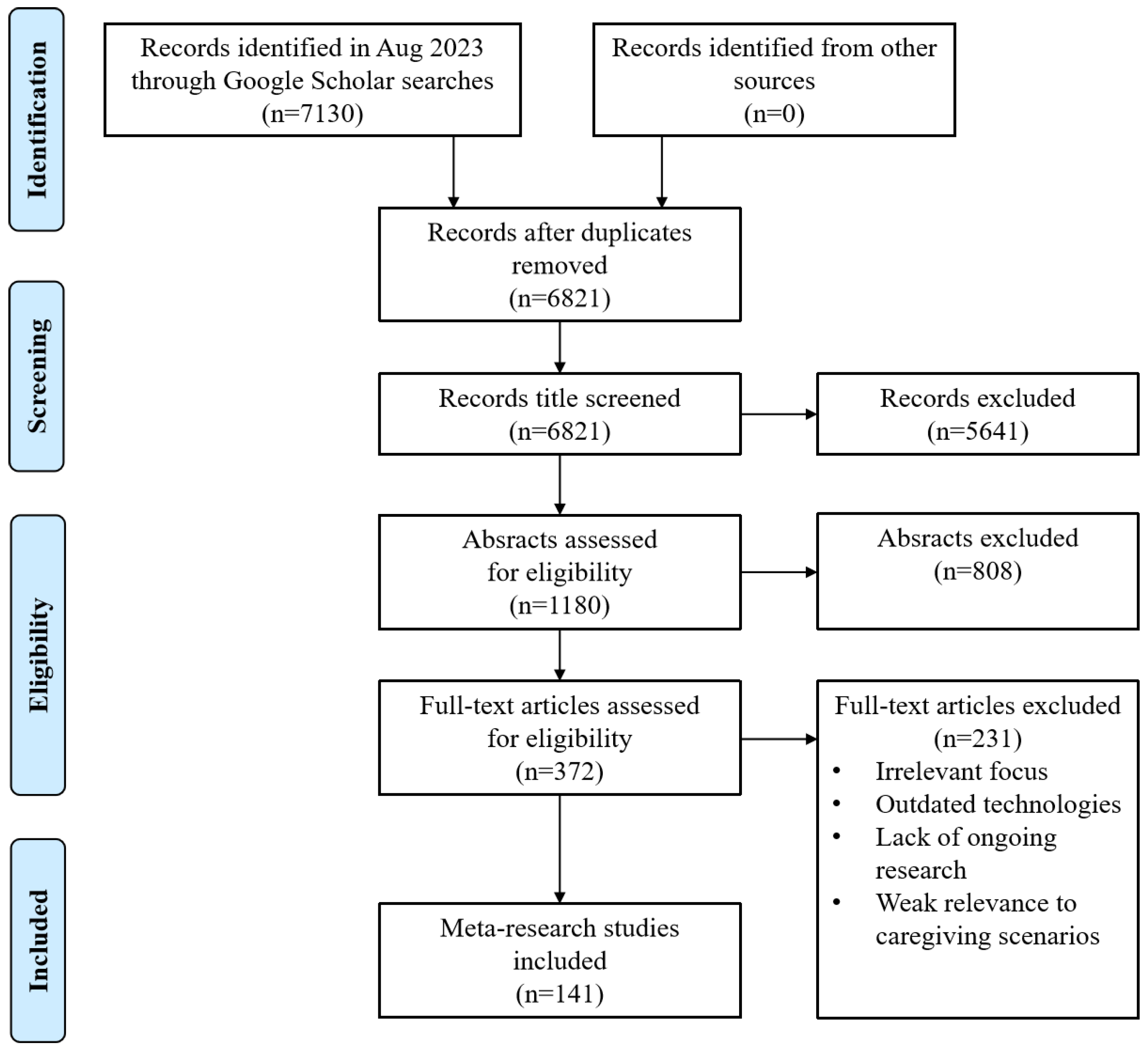
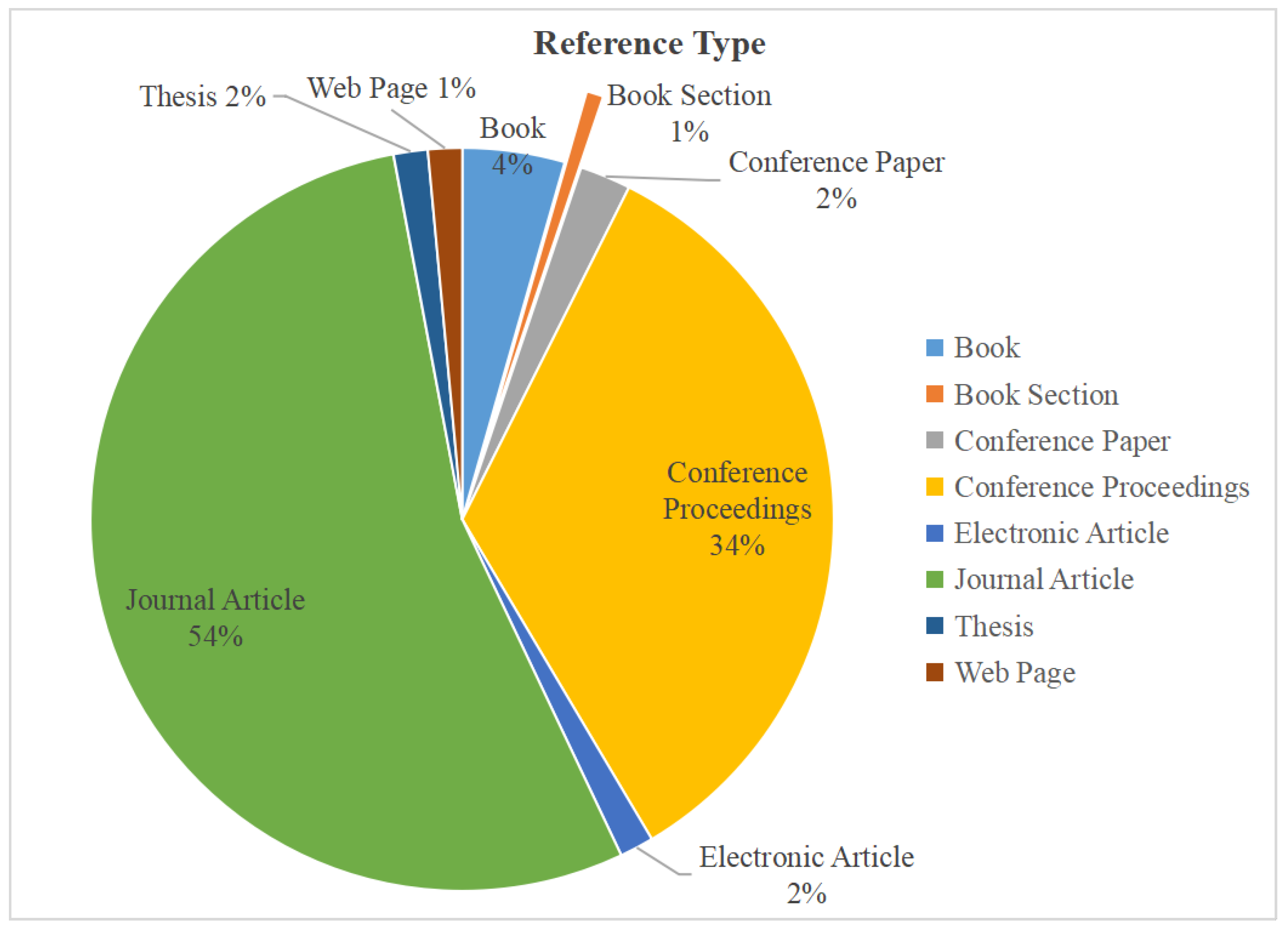
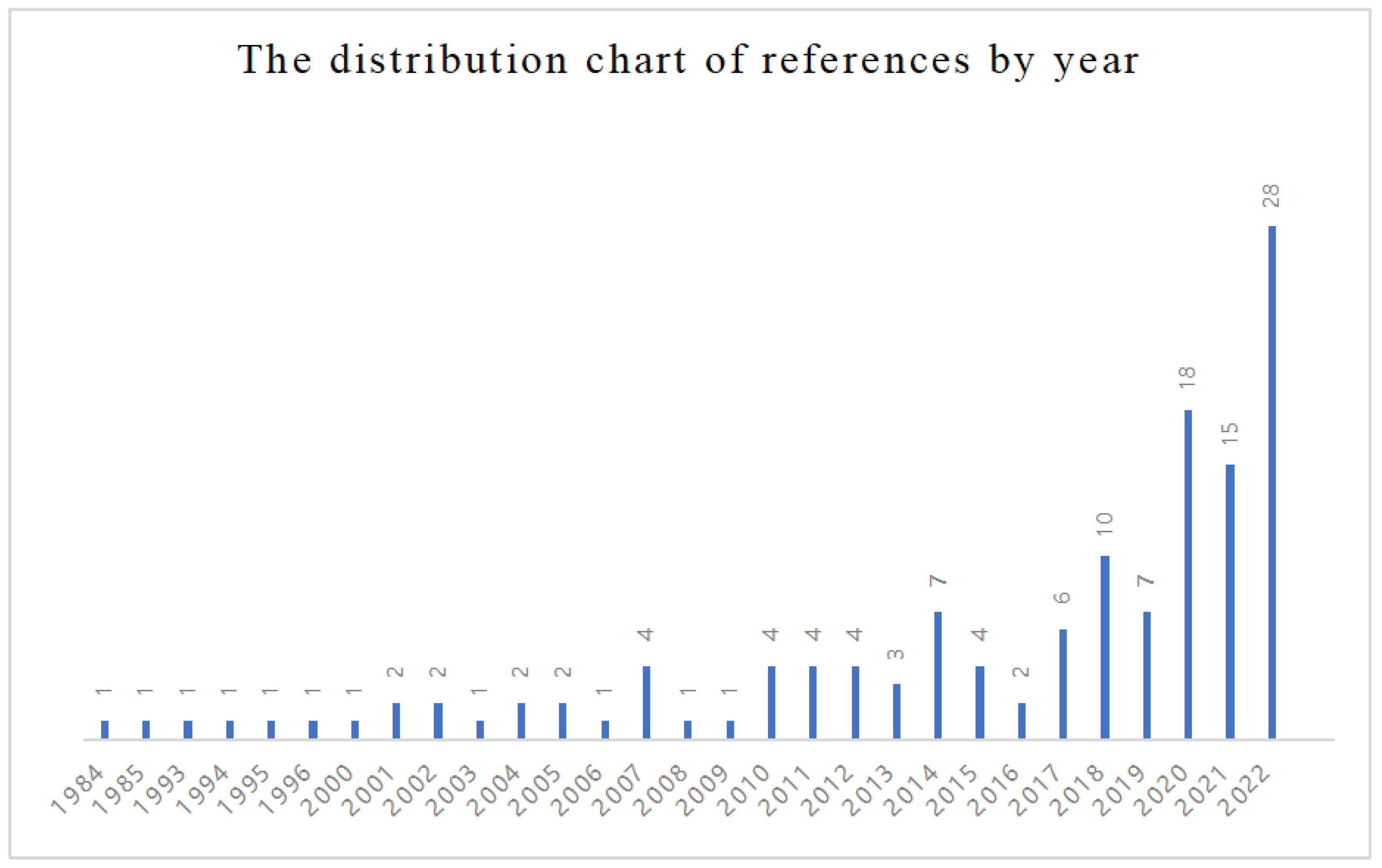
2. Methodology and Statistics
3. DOM in Caregiving: Outlook, Analysis, and Challenges
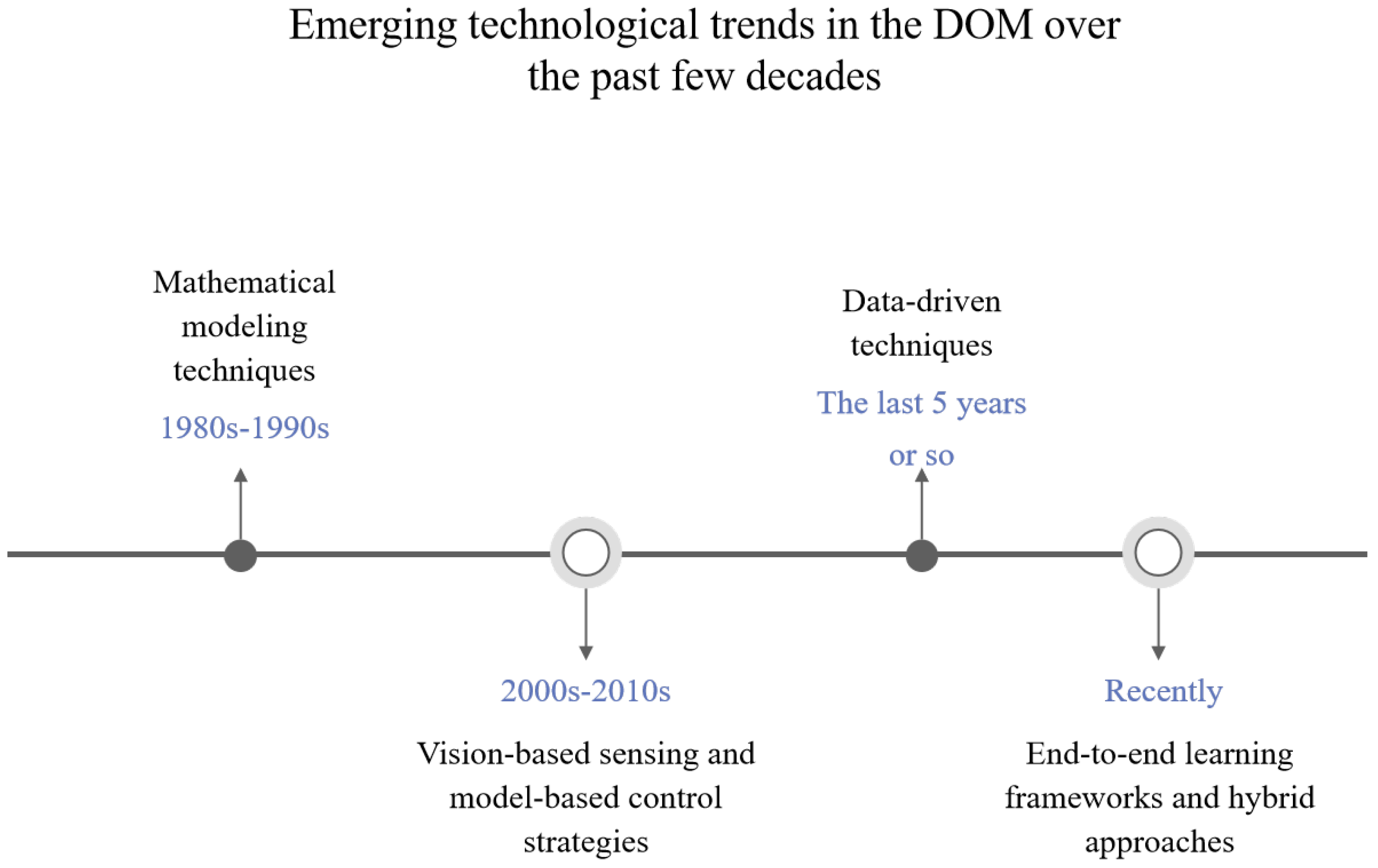
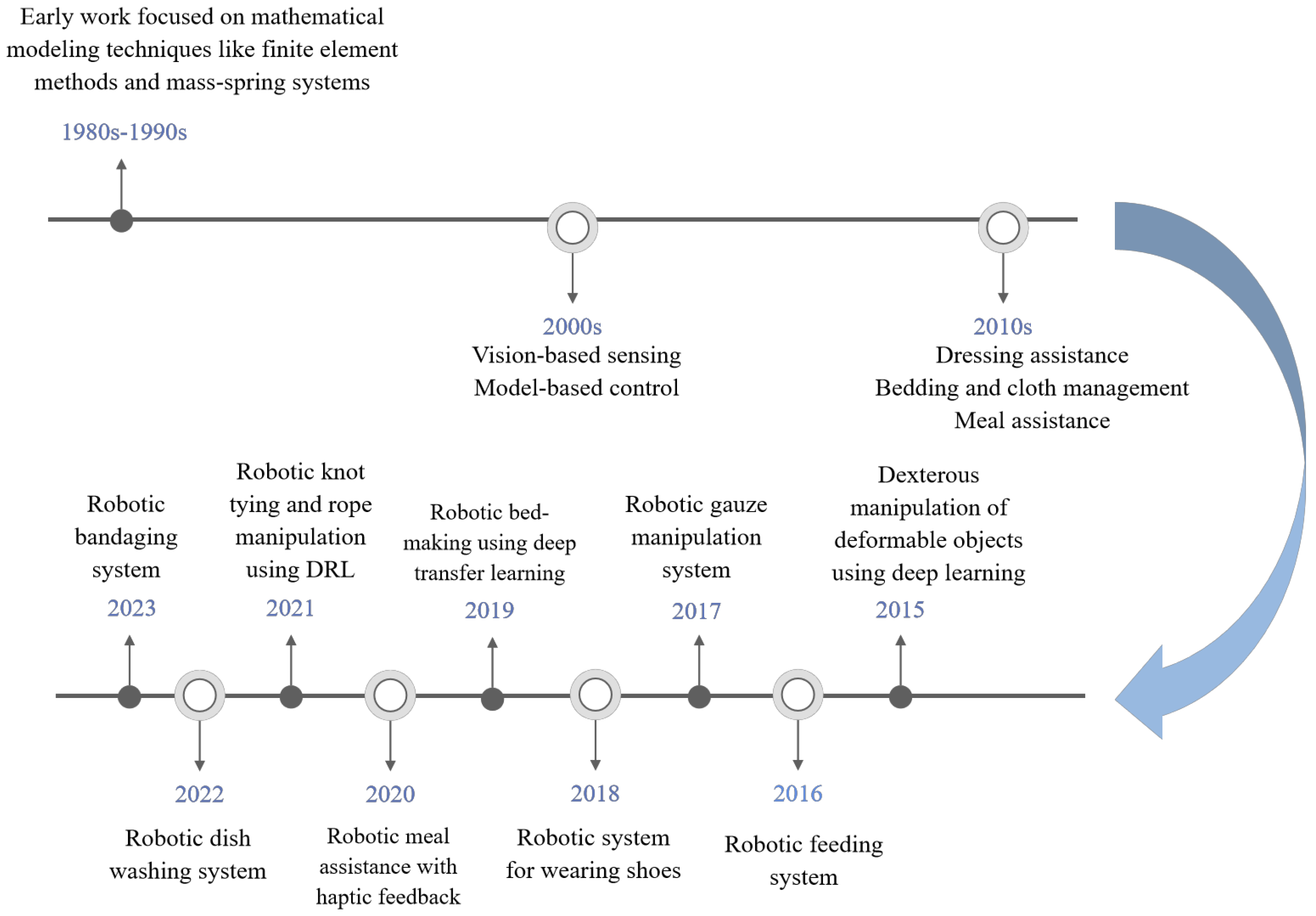
3.1. An Outlook by Timeline
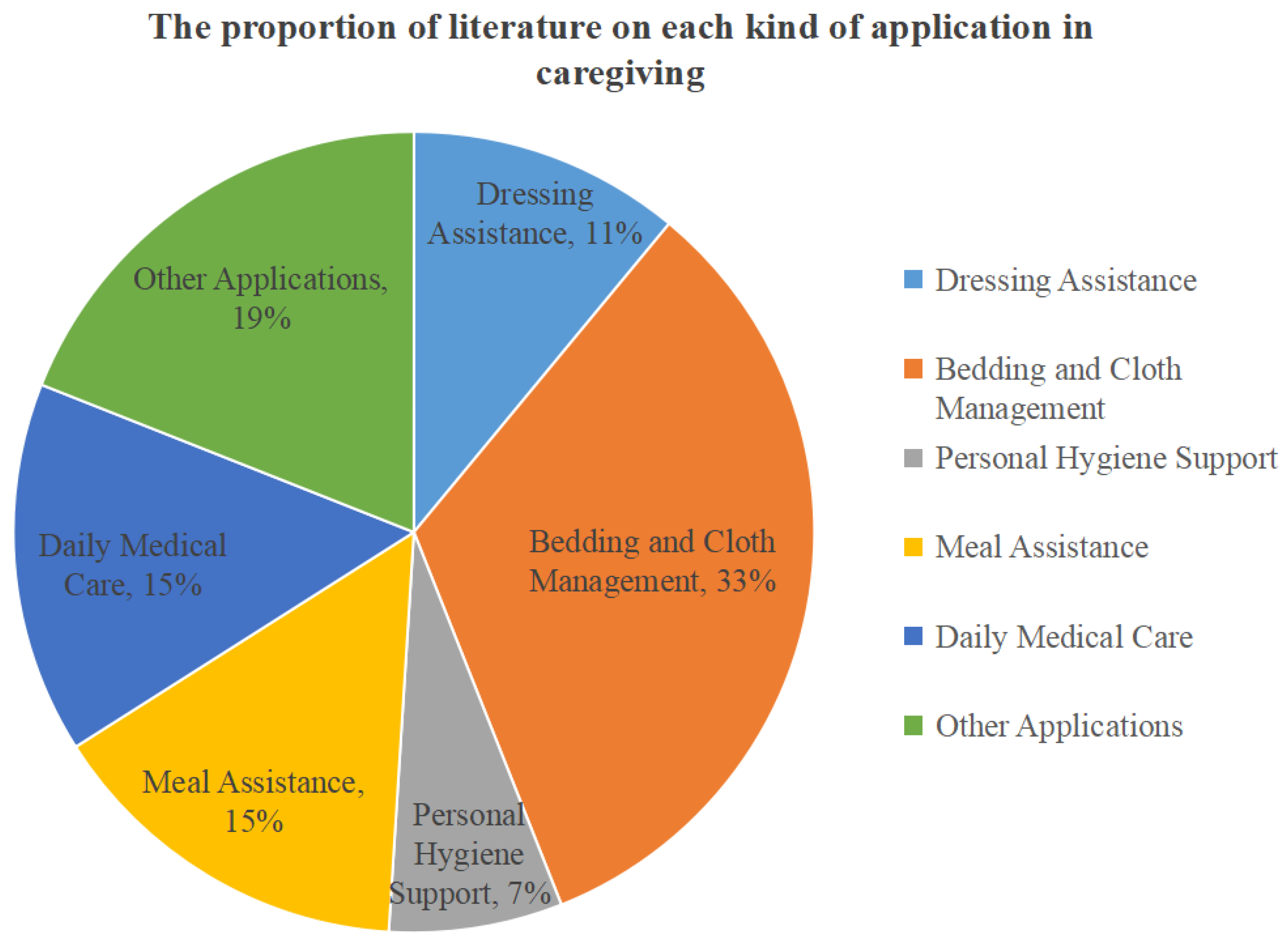
3.2. Classification of Applications
- Dressing assistance is an essential application of DOM in caregiving scenarios, particularly for users with limited mobility or dexterity. Researchers have developed robots capable of assisting users in putting on various clothing items, including T-shirts [19], pants [37], and footwear [38]. These studies have demonstrated the potential of DOM in addressing the challenges faced by individuals with disabilities and the elderly in performing daily dressing tasks.
- Bedding and Cloth Management is another crucial application of DOM in caregiving scenarios, as it involves handling large, deformable objects and ensuring user comfort and hygiene. Researchers have developed robotic bed-making systems to grasp tension and smooth fitted sheets [20]. Robots capable of managing blankets [21] and pillows [22] have also been developed. The success of these works highlights the potential of DOM in addressing the challenges associated with bedsheet management and the need for continued research and development in this area. Cloth folding is also essential in caregiving settings, particularly for maintaining order and cleanliness. Researchers have developed robots capable of folding clothes, such as towels, shirts, and ropes [19,34,39,40,41,42,43].
- Personal Hygiene Support is another critical application of DOM in caregiving scenarios. Researchers have developed robots that handle soft materials such as gauze [27] and diapers [44]. These studies have highlighted the importance of integrating various sensory modalities and control techniques for effective soft material handling in caregiving scenarios.
- Meal Assistance is another important application of DOM in caregiving scenarios, particularly for users with limited mobility or dexterity. Researchers have developed robots capable of manipulating deformable objects such as food items and utensils [23,24,25,26]. These studies have demonstrated the potential of DOM in addressing the challenges faced by individuals with disabilities and the elderly in performing daily meal assistance tasks.
- Daily Medical Care. In the context of bandaging, deformable object manipulation systems offer improved precision and control, enabling more effective and efficient wound-dressing procedures. These systems can adapt to the varying shapes and contours of the human body, as well as the patient’s involuntary swaying, ensuring proper bandage placement and tension for optimal healing [28]. Deformable object manipulation technologies assist patients during therapeutic exercises and activities in rehabilitation. They provide real-time feedback, support, and guidance, enhancing repair and promoting faster recovery [45,46,47].
3.3. A New Method to Classify and Analyse
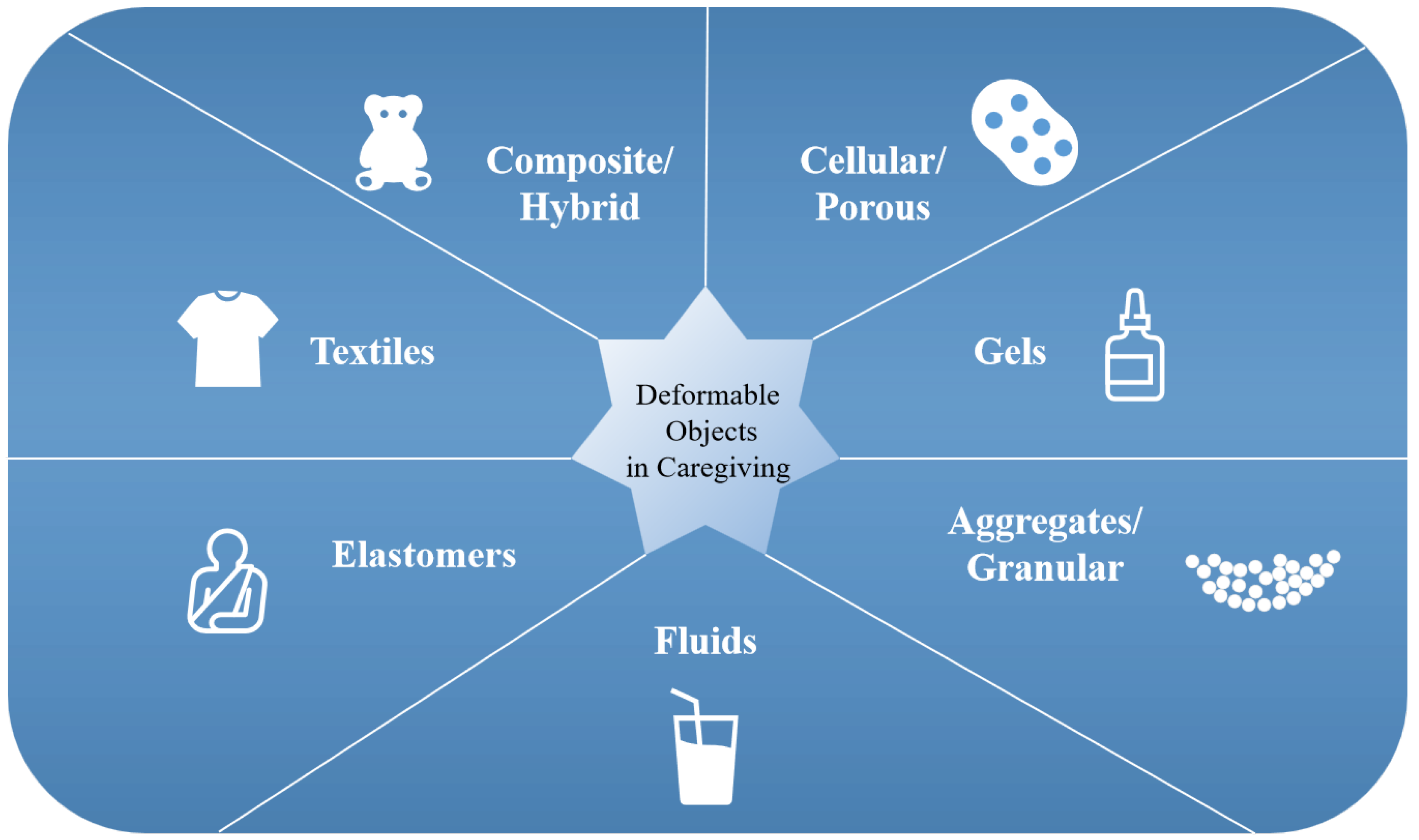
3.3.1. Common Types of Deformable Objects in Caregiving Scenarios
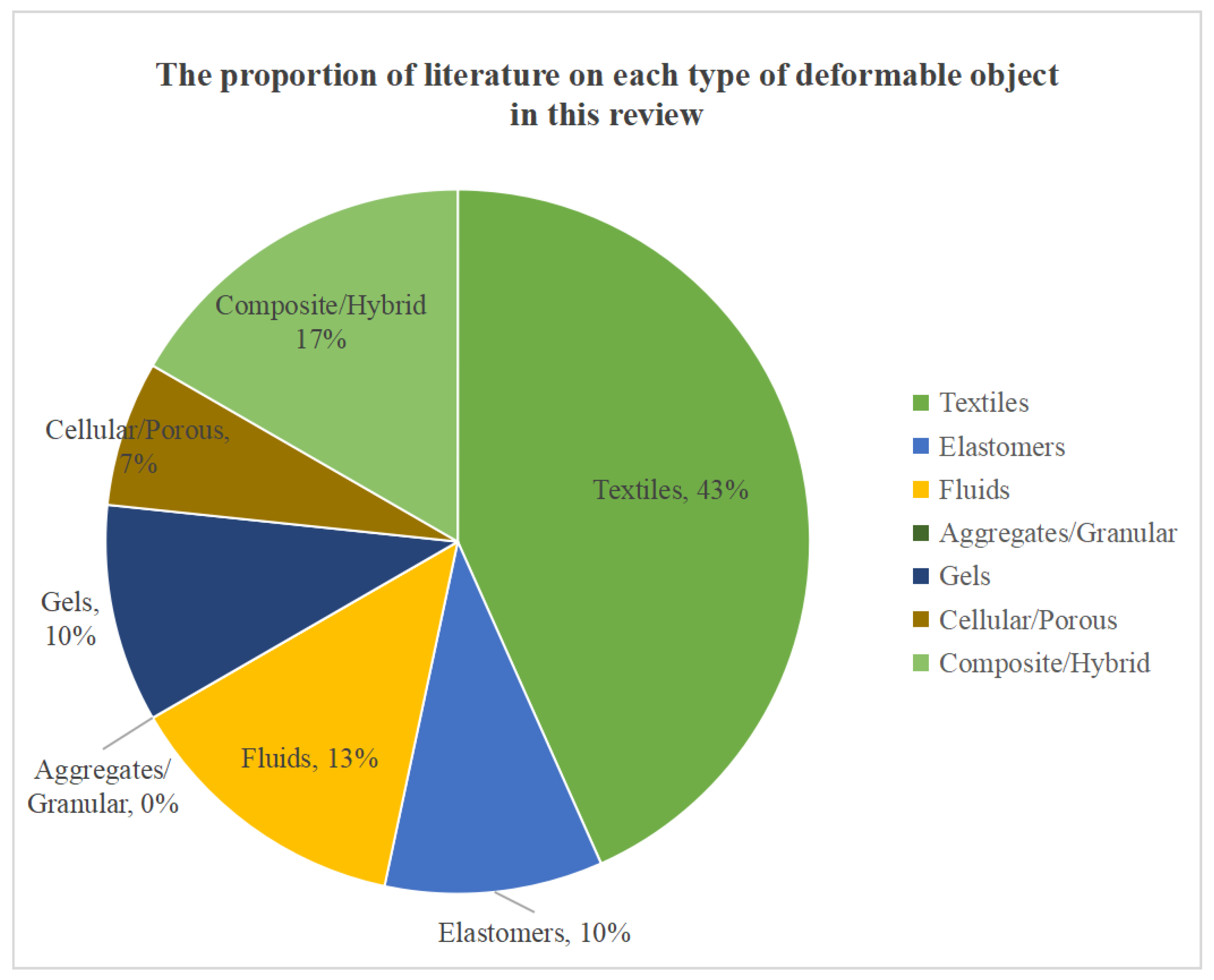
- Textiles: This category would cover all cloth and fabric objects like clothing, sheets, towels, etc. Key properties are flexibility, drape, and shear.
- Elastomers: Includes stretchable/elastic materials like bandages, tubing, and exercise bands. Key properties are elongation and elasticity.
- Fluids: Encompasses materials like water, shampoo, and creams that flow and conform to containers. Key behaviors are pourability and viscosity.
- Aggregates/Granular: Covers aggregated materials like rice, beans, and tablets. Flows but maintains loose particulate structure.
- Gels: Highly viscous/elastic fluids like food gels, slime, and putty. Resist flow due to cross-linked molecular structure.
- Cellular/Porous: Materials with internal voids like sponges and soft foams. Compressible and exhibit springback.
- Composite/Hybrid: Combinations of the above categories, like stuffed animals and packaged goods. Display complex interactions of properties.
3.3.2. A Multi-Factor Analysis Method
- Application Utility (U)—Potential to reduce caregiver burden by automating tasks
- Object Frequency (F)—How often the object occurs in caregiving activities
- Task Complexity (C)—Technical challenges posed by physical properties and handling difficulties
- Safety Criticality (S)—Risks of injury or harm during object manipulation
- Research Maturity (M)—Existing state of manipulation methods for the object
- Surveys, interviews, and activity logging (for Application Utility)
- Workflow observations and activity logging (for Object Frequency)
- Material testing, caregiver surveys, and interviews (for Task Complexity)
- Incident data and healthcare professional feedback (for Safety Criticality)
- Literature review (for Research Maturity)
- Each metric is normalised on a 0–1 scale based on the maximum value observed. This transforms metrics to a common scale.
- Criteria weights are assigned to each factor based on the caregiving context. For example, Safety Criticality may be weighted higher for hospital settings compared to home care.
- Weighted sums are calculated by multiplying each normalised metric by the criteria weight.
- The weighted sums are aggregated to derive an overall priority score P for each deformable object, where U, F, C, S, and M are the normalised metrics and w1 to w5 are the criteria weights.:
- Objects are ranked by priority score P, identifying high-impact areas needing research innovations.
3.4. Challenges of DOM in Caregiving
4. Key Technologies for DOM in Caregiving
4.1. Modelling and Simulation
4.1.1. Mathematical Models
4.1.2. Data-Driven Models
4.1.3. Hybrid Models
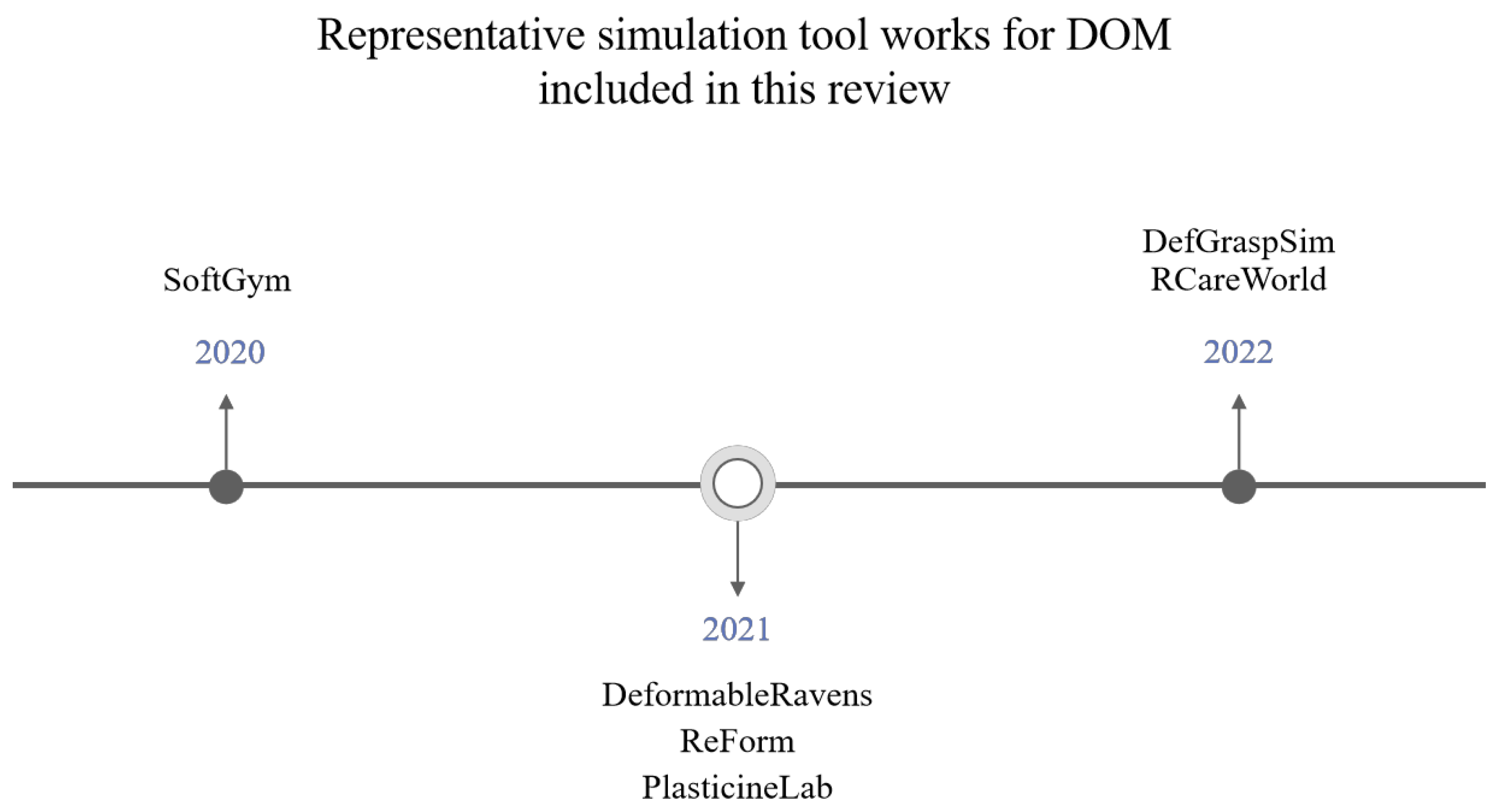
4.1.4. Simulation Tools and Environments
- SoftGym [52] is a simulation environment focusing on soft-body manipulation tasks, providing researchers with a platform to develop and test algorithms for various applications such as robotic grasping and manipulation. While SoftGym may offer unique benefits and opportunities, it is essential to examine its limitations and potential areas for improvement critically. One possible drawback is that the simulation may need to fully represent the complex real-world conditions, which could lead to discrepancies when applying developed algorithms to actual tasks. Additionally, the simulation might only cover some possible soft-body objects and scenarios, potentially limiting its applicability to a narrower range of cases. Further research and development in SoftGym may be required to address these limitations and ensure the platform’s continued relevance and effectiveness.
- DeformableRavens [87] is an open-source simulated benchmark, with 12 tasks manipulating 1D, 2D, and 3D deformable objects to help accelerate research progress in the robotic manipulation of deformable materials. It creates an end-to-end target conditional transportation network that learns visual-based multi-step operations for deformable 1D, 2D, and 3D structures. However, the current scope of DeformableRavens is limited to a set of predefined tasks and objects, which may hinder its adaptability to more diverse scenarios.
- ReForm [88] is another simulation environment focusing on deformable objects like metal wires with elastic and plastic properties. While it addresses the limitations of SoftGym, more information about its usability, versatility, and performance in a broader range of applications would be needed to assess its overall effectiveness.
- PlasticineLab [77] is a simulation environment focusing on soft-body manipulation, utilising differentiable physics to optimise control policies for robotic manipulation tasks. While PlasticineLab offers a novel approach to solving soft-body manipulation problems, it is crucial to consider potential limitations and areas for improvement. One concern could be the accuracy of the differentiable physics models, which might need to capture the complex interactions between objects and their environment fully. Furthermore, the scalability of the simulation to more complex and diverse scenarios may be limited, which could affect its applicability to real-world situations.
- DefGraspSim [78] is a simulation environment focusing on grasping 3D deformable objects like fruits, vegetables, and internal organs. While the simulation provides valuable insights into robotic grasping strategies, it is essential to consider potential limitations and areas for improvement. For instance, the simulation may not account for all possible variations in object shape, material properties, and environmental factors, which could affect the performance of developed algorithms in real-world applications. Additionally, the simulation’s efficiency may be limited by the processing power of the GPU used, potentially restricting the ability to test a wide range of objects and scenarios in a reasonable time frame.
- RCareWorld [79] is a human-centric simulation environment designed to develop physical and social robotic caregiving. The simulation incorporates inputs from stakeholders such as care recipients, caregivers, occupational therapists, and roboticists. While RCareWorld offers a promising platform for developing robotic caregiving solutions, examining potential limitations and areas for improvement is essential. For example, the simulation may not fully capture the complexities of human–robot interaction in real-world caregiving settings, which could lead to discrepancies when applying developed algorithms to actual tasks. Additionally, the simulation might only cover some possible care scenarios and patient needs, potentially limiting its applicability to a narrower range of cases. Ongoing research and development in RCareWorld will be crucial to address these limitations and ensure the platform’s continued relevance and effectiveness.
4.2. Perception and Sensing
4.2.1. Vision-Based Techniques
4.2.2. Tactile Sensing
4.2.3. Sensor Fusion
4.3. Planning and Control
4.3.1. Model-Based Control
4.3.2. Model-Free Control
4.3.3. Hybrid Control Strategies
4.4. End-to-End Learning
4.5. Manipulator and Assistive Device Designs
4.5.1. Manipulator Design
4.5.2. Assistive Device Design
5. Safety Ensurance and Social Challenges
5.1. Safety Ensurance
- Mechanical design plays a key role in mitigating safety risks. Soft robotic systems built with compliant materials can conform to objects and distribute forces more evenly during manipulation. This reduces risks of damage or injury compared to traditional rigid robots [132]. Compliant joints and actuators also help absorb impacts from collisions.
- Control strategies must adapt in real time to deformable objects’ changing shapes and material properties. Model-based methods like impedance control allow us to adjust robotic stiffness and damping [133]. Incorporating adaptive, safety-aware algorithms enables them to respond appropriately to variations in the environment and task [73]. This helps maintain stability and prevent unsafe interactions.
5.2. Social and Psychological Challenges
6. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- WHO. Ageing and Health; World Health Organization: Geneva, Switzerland, 2022. [Google Scholar]
- Persson, M.; Redmalm, D.; Iversen, C. Caregivers’ use of robots and their effect on work environment—A scoping review. J. Technol. Hum. Serv. 2021, 40, 251–277. [Google Scholar] [CrossRef]
- Madan, R.; Jenamani, R.K.; Nguyen, V.T.; Moustafa, A.; Hu, X.; Dimitropoulou, K.; Bhattacharjee, T. SPARCS: Structuring Physically Assistive Robotics for Caregiving with Stakeholders-in-the-loop. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022. [Google Scholar]
- Pfadenhauer, M.; Dukat, C. Robot Caregiver or Robot-Supported Caregiving? Int. J. Soc. Robot. 2015, 7, 393–406. [Google Scholar] [CrossRef]
- Suomalainen, M.; Karayiannidis, Y.; Kyrki, V. A survey of robot manipulation in contact. Robot. Auton. Syst. 2022, 156, 104224. [Google Scholar] [CrossRef]
- Schulman, J.; Lee, A.; Ho, J.; Abbeel, P. Tracking deformable objects with point clouds. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 7–9 May 2013. [Google Scholar]
- Kesner, S.B.; Howe, R.D. Force control of flexible catheter robots for beating heart surgery. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Nadon, F.; Valencia, A.; Payeur, P. Multi-Modal Sensing and Robotic Manipulation of Non-Rigid Objects: A Survey. Robotics 2018, 7, 74. [Google Scholar] [CrossRef]
- Jiménez, P. Survey on model-based manipulation planning of deformable objects. Robot. Comput.-Integr. Manuf. 2012, 28, 154–163. [Google Scholar] [CrossRef]
- Zou, L.; Ge, C.; Wang, Z.; Cretu, E.; Li, X. Novel Tactile Sensor Technology and Smart Tactile Sensing Systems: A Review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef]
- Mason, M.T. Dynamic Manipulation. In Mechanics of Robotic Manipulation; The MIT Press: Cambridge, MA, USA, 2001. [Google Scholar] [CrossRef]
- Han, D.; Mulyana, B.; Stankovic, V.; Cheng, S. A Survey on Deep Reinforcement Learning Algorithms for Robotic Manipulation. Sensors 2023, 23, 3762. [Google Scholar] [CrossRef] [PubMed]
- Kolachalama, S.; Lakshmanan, S. Continuum Robots for Manipulation Applications: A Survey. J. Robot. 2020, 2020, 4187048. [Google Scholar] [CrossRef]
- Han, J.; Davids, J.; Ashrafian, H.; Darzi, A.; Elson, D.S.; Sodergren, M. A systematic review of robotic surgery: From supervised paradigms to fully autonomous robotic approaches. Int. J. Med. Robot. Comput. Assist. Surg. 2021, 18, e2358. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef]
- Jalon, J.G.; Cuadrado, J.; Avello, A.; Jimenez, J.M. Kinematic and Dynamic Simulation of Rigid and Flexible Systems with Fully Cartesian Coordinates. In Computer-Aided Analysis of Rigid and Flexible Mechanical Systems; Springer: Dordrecht, The Netherlands, 1994; pp. 285–323. [Google Scholar]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; John Wiley and Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Bohg, J.; Morales, A.; Asfour, T.; Kragic, D. Data-Driven Grasp Synthesis—A Survey. IEEE Trans. Robot. 2014, 30, 289–309. [Google Scholar] [CrossRef]
- Koganti, N.; Tamei, T.; Matsubara, T.; Shibata, T. Real-time estimation of Human-Cloth topological relationship using depth sensor for robotic clothing assistance. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014. [Google Scholar]
- Goldberg, K. Deep Transfer Learning of Pick Points on Fabric for Robot Bed-Making. In Proceedings of the Robotics Research: The 19th International Symposium ISRR; Springer Nature: Cham, Switzerland, 2022; Volume 20, p. 275. [Google Scholar]
- Avigal, Y.; Berscheid, L.; Asfour, T.; Kroger, T.; Goldberg, K. SpeedFolding: Learning Efficient Bimanual Folding of Garments. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022. [Google Scholar]
- Yang, P.C.; Sasaki, K.; Suzuki, K.; Kase, K.; Sugano, S.; Ogata, T. Repeatable Folding Task by Humanoid Robot Worker Using Deep Learning. IEEE Robot. Autom. Lett. 2017, 2, 397–403. [Google Scholar] [CrossRef]
- Park, D.; Hoshi, Y.; Mahajan, H.P.; Kim, H.K.; Erickson, Z.; Rogers, W.A.; Kemp, C.C. Active robot-assisted feeding with a general-purpose mobile manipulator: Design, evaluation, and lessons learned. Robot. Auton. Syst. 2020, 124, 103344. [Google Scholar] [CrossRef]
- Bhattacharjee, T.; Lee, G.; Song, H.; Srinivasa, S.S. Towards Robotic Feeding: Role of Haptics in Fork-Based Food Manipulation. IEEE Robot. Autom. Lett. 2019, 4, 1485–1492. [Google Scholar] [CrossRef]
- Feng, R.; Kim, Y.; Lee, G.; Gordon, E.K.; Schmittle, M.; Kumar, S.; Bhattacharjee, T.; Srinivasa, S.S. Robot-Assisted Feeding: Generalizing Skewering Strategies Across Food Items on a Plate. In Springer Proceedings in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2022; pp. 427–442. [Google Scholar]
- Hai, N.D.X.; Thinh, N.T. Self-Feeding Robot for Elder People and Parkinson’s Patients in Meal Supporting. Int. J. Mech. Eng. Robot. Res. 2022, 11, 241–247. [Google Scholar] [CrossRef]
- Sanchez, J.; Corrales, J.A.; Bouzgarrou, B.C.; Mezouar, Y. Robotic manipulation and sensing of deformable objects in domestic and industrial applications: A survey. Int. J. Robot. Res. 2018, 37, 688–716. [Google Scholar] [CrossRef]
- Li, J.; Sun, W.; Gu, X.; Guo, J.; Ota, J.; Huang, Z.; Zhang, Y. A Method for a Compliant Robot Arm to Perform a Bandaging Task on a Swaying Arm: A Proposed Approach. IEEE Robot. Autom. Mag. 2023, 30, 50–61. [Google Scholar] [CrossRef]
- Park, F.; Bobrow, J.; Ploen, S. A Lie Group Formulation of Robot Dynamics. Int. J. Robot. Res. 1995, 14, 609–618. [Google Scholar] [CrossRef]
- Mergler, H. Introduction to robotics. IEEE J. Robot. Autom. 1985, 1, 215. [Google Scholar] [CrossRef]
- Lévesque, V.; Pasquero, J.; Hayward, V.; Legault, M. Display of virtual braille dots by lateral skin deformation: Feasibility study. ACM Trans. Appl. Percept. 2005, 2, 132–149. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Fermuller, C.; Aloimonos, Y. Robot Learning Manipulation Action Plans by “Watching” Unconstrained Videos from the World Wide Web. Proc. AAAI Conf. Artif. Intell. 2015, 29, 3692–3696. [Google Scholar] [CrossRef]
- Li, S.; Ma, X.; Liang, H.; Gorner, M.; Ruppel, P.; Fang, B.; Sun, F.; Zhang, J. Vision-based Teleoperation of Shadow Dexterous Hand using End-to-End Deep Neural Network. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), IEEE, Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Wu, Y.; Yan, W.; Kurutach, T.; Pinto, L.; Abbeel, P. Learning to Manipulate Deformable Objects without Demonstrations. In Proceedings of the Robotics: Science and Systems XVI. Robotics: Science and Systems Foundation, Corvalis, OR, USA, 12–16 July 2020. [Google Scholar]
- Teng, Y.; Lu, H.; Li, Y.; Kamiya, T.; Nakatoh, Y.; Serikawa, S.; Gao, P. Multidimensional Deformable Object Manipulation Based on DN-Transporter Networks. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4532–4540. [Google Scholar] [CrossRef]
- Bedaf, S.; Draper, H.; Gelderblom, G.J.; Sorell, T.; de Witte, L. Can a Service Robot Which Supports Independent Living of Older People Disobey a Command? The Views of Older People, Informal Carers and Professional Caregivers on the Acceptability of Robots. Int. J. Soc. Robot. 2016, 8, 409–420. [Google Scholar] [CrossRef]
- Yamazaki, K.; Oya, R.; Nagahama, K.; Okada, K.; Inaba, M. Bottom dressing by a life-sized humanoid robot provided failure detection and recovery functions. In Proceedings of the 2014 IEEE/SICE International Symposium on System Integration, Tokyo, Japan, 13–15 December 2014. [Google Scholar]
- Li, Y.; Xiao, A.; Feng, Q.; Zou, T.; Tian, C. Design of Service Robot for Wearing and Taking off Footwear. E3S Web Conf. 2020, 189, 03024. [Google Scholar] [CrossRef]
- Jia, B.; Pan, Z.; Hu, Z.; Pan, J.; Manocha, D. Cloth Manipulation Using Random-Forest-Based Imitation Learning. IEEE Robot. Autom. Lett. 2019, 4, 2086–2093. [Google Scholar] [CrossRef]
- Tsurumine, Y.; Matsubara, T. Goal-aware generative adversarial imitation learning from imperfect demonstration for robotic cloth manipulation. Robot. Auton. Syst. 2022, 158, 104264. [Google Scholar] [CrossRef]
- Verleysen, A.; Holvoet, T.; Proesmans, R.; Den Haese, C.; Wyffels, F. Simpler Learning of Robotic Manipulation of Clothing by Utilizing DIY Smart Textile Technology. Appl. Sci. 2020, 10, 4088. [Google Scholar] [CrossRef]
- Jia, B.; Hu, Z.; Pan, Z.; Manocha, D.; Pan, J. Learning-based feedback controller for deformable object manipulation. arXiv 2018, arXiv:1806.09618. [Google Scholar]
- Deng, Y.; Xia, C.; Wang, X.; Chen, L. Graph-Transporter: A Graph-based Learning Method for Goal-Conditioned Deformable Object Rearranging Task. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022. [Google Scholar]
- Baek, J. Smart predictive analytics care monitoring model based on multi sensor IoT system: Management of diaper and attitude for the bedridden elderly. Sensors Int. 2023, 4, 100213. [Google Scholar] [CrossRef]
- Torrisi, M.; Maggio, M.G.; De Cola, M.C.; Zichittella, C.; Carmela, C.; Porcari, B.; la Rosa, G.; De Luca, R.; Naro, A.; Calabrò, R.S. Beyond motor recovery after stroke: The role of hand robotic rehabilitation plus virtual reality in improving cognitive function. J. Clin. Neurosci. 2021, 92, 11–16. [Google Scholar] [CrossRef]
- Vaida, C.; Birlescu, I.; Pisla, A.; Ulinici, I.M.; Tarnita, D.; Carbone, G.; Pisla, D. Systematic Design of a Parallel Robotic System for Lower Limb Rehabilitation. IEEE Access 2020, 8, 34522–34537. [Google Scholar] [CrossRef]
- Chockalingam, M.; Vasanthan, L.T.; Balasubramanian, S.; Sriram, V. Experiences of patients who had a stroke and rehabilitation professionals with upper limb rehabilitation robots: A qualitative systematic review protocol. BMJ Open 2022, 12, e065177. [Google Scholar] [CrossRef] [PubMed]
- Frei, J.; Ziltener, A.; Wüst, M.; Havelka, A.; Lohan, K. Iterative Development of s Service Robot for Laundry Transport in Nursing Homes. In Social Robotics; Springer Nature: Cham, Switzerland, 2022; pp. 359–370. [Google Scholar]
- Hussin, E.; Jie Jian, W.; Sahar, N.; Zakariya, A.; Ridzuan, A.; Suhana, C.; Mohamed Juhari, R.; Wei Hong, L. A Healthcare Laundry Management System using RFID System. Proc. Int. Conf. Artif. Life Robot. 2022, 27, 875–880. [Google Scholar] [CrossRef]
- Zhang, A.; Yao, Y.; Hu, Y. Analyzing the Design of Windows Cleaning Robots. In Proceedings of the 2022 3rd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), IEEE, Xi’an, China, 15–17 July 2022. [Google Scholar]
- Lo, W.S.; Yamamoto, C.; Pattar, S.P.; Tsukamoto, K.; Takahashi, S.; Sawanobori, T.; Mizuuchi, I. Developing a Collaborative Robotic Dishwasher Cell System for Restaurants. In Lecture Notes in Networks and Systems; Springer International Publishing: Cham, Switzerland, 2022; pp. 261–275. [Google Scholar]
- Lin, X.; Wang, Y.; Olkin, J.; Held, D. SoftGym: Benchmarking Deep Reinforcement Learning for Deformable Object Manipulation. Proc. Mach. Learn. Res. 2021, 155, 432–448. [Google Scholar]
- Scheikl, P.M.; Tagliabue, E.; Gyenes, B.; Wagner, M.; Dall’Alba, D.; Fiorini, P.; Mathis-Ullrich, F. Sim-to-Real Transfer for Visual Reinforcement Learning of Deformable Object Manipulation for Robot-Assisted Surgery. IEEE Robot. Autom. Lett. 2023, 8, 560–567. [Google Scholar] [CrossRef]
- Thach, B.; Kuntz, A.; Hermans, T. DeformerNet: A Deep Learning Approach to 3D Deformable Object Manipulation. arXiv 2021, arXiv:2107.08067v1. [Google Scholar]
- Yin, H.; Varava, A.; Kragic, D. Modeling, learning, perception, and control methods for deformable object manipulation. Sci. Robot. 2021, 6, eabd8803. [Google Scholar] [CrossRef] [PubMed]
- Delgado, A.; Corrales, J.; Mezouar, Y.; Lequievre, L.; Jara, C.; Torres, F. Tactile control based on Gaussian images and its application in bi-manual manipulation of deformable objects. Robot. Auton. Syst. 2017, 94, 148–161. [Google Scholar] [CrossRef]
- Frank, B.; Stachniss, C.; Abdo, N.; Burgard, W. Using Gaussian Process Regression for Efficient Motion Planning in Environments with Deformable Objects. In Proceedings of the AAAIWS’11-09: Proceedings of the 9th AAAI Conference on Automated Action Planning for Autonomous Mobile Robots, San Francisco, CA, USA, 7 August 2011. [Google Scholar]
- Hu, Z.; Sun, P.; Pan, J. Three-Dimensional Deformable Object Manipulation Using Fast Online Gaussian Process Regression. IEEE Robot. Autom. Lett. 2018, 3, 979–986. [Google Scholar] [CrossRef]
- Antonova, R.; Yang, J.; Sundaresan, P.; Fox, D.; Ramos, F.; Bohg, J. A Bayesian Treatment of Real-to-Sim for Deformable Object Manipulation. IEEE Robot. Autom. Lett. 2022, 7, 5819–5826. [Google Scholar] [CrossRef]
- Zheng, C.X.; Colomé, A.; Sentis, L.; Torras, C. Mixtures of Controlled Gaussian Processes for Dynamical Modeling of Deformable Objects. In Proceedings of the 4th Annual Learning for Dynamics and Control Conference, PMLR, Stanford, CA, USA, 23–24 June 2022; Volume 168, pp. 415–426. [Google Scholar]
- Li, R.; Platt, R.; Yuan, W.; ten Pas, A.; Roscup, N.; Srinivasan, M.A.; Adelson, E. Localization and manipulation of small parts using GelSight tactile sensing. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Cui, S.; Wang, R.; Wei, J.; Li, F.; Wang, S. Grasp State Assessment of Deformable Objects Using Visual-Tactile Fusion Perception. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Khalil, F.F.; Payeur, P. Robotic Interaction with Deformable Objects under Vision and Tactile Guidance—A Review. In Proceedings of the 2007 International Workshop on Robotic and Sensors Environments, IEEE, Kyoto, Japan, 23–27 October 2007. [Google Scholar]
- Yamaguchi, A.; Atkeson, C.G. Tactile Behaviors with the Vision-Based Tactile Sensor FingerVision. Int. J. Humanoid Robot. 2019, 16, 1940002. [Google Scholar] [CrossRef]
- Liang, L.; Liu, M.; Martin, C.; Sun, W. A deep learning approach to estimate stress distribution: A fast and accurate surrogate of finite-element analysis. J. R. Soc. Interface 2018, 15, 20170844. [Google Scholar] [CrossRef]
- Kapitanyuk, Y.A.; Proskurnikov, A.V.; Cao, M. A Guiding Vector-Field Algorithm for Path-Following Control of Nonholonomic Mobile Robots. IEEE Trans. Control Syst. Technol. 2018, 26, 1372–1385. [Google Scholar] [CrossRef]
- Kalashnikov, D.; Irpan, A.; Pastor, P.; Ibarz, J.; Herzog, A.; Jang, E.; Quillen, D.; Holly, E.; Kalakrishnan, M.; Vanhoucke, V.; et al. QT-Opt: Scalable Deep Reinforcement Learning for Vision-Based Robotic Manipulation. arXiv 2018, arXiv:1806.10293. [Google Scholar]
- Hogan, N. Impedance Control: An Approach to Manipulation. In Proceedings of the 1984 American Control Conference, IEEE, San Diego, CA, USA, 6–8 June 1984. [Google Scholar]
- Edsinger, A.; Kemp, C.C. Human-Robot Interaction for Cooperative Manipulation: Handing Objects to One Another. In Proceedings of the RO-MAN 2007—The 16th IEEE International Symposium on Robot and Human Interactive Communication, Jeju, Republic of Korea, 26–29 August 2007. [Google Scholar]
- Kruse, D.; Radke, R.J.; Wen, J.T. Collaborative human-robot manipulation of highly deformable materials. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Sirintuna, D.; Giammarino, A.; Ajoudani, A. Human-Robot Collaborative Carrying of Objects with Unknown Deformation Characteristics. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022. [Google Scholar]
- Lotti, N.; Xiloyannis, M.; Durandau, G.; Galofaro, E.; Sanguineti, V.; Masia, L.; Sartori, M. Adaptive Model-Based Myoelectric Control for a Soft Wearable Arm Exosuit: A New Generation of Wearable Robot Control. IEEE Robot. Autom. Mag. 2020, 27, 43–53. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.; Gienger, M.; Franzese, G.; Kober, J. Do You Need a Hand?—A Bimanual Robotic Dressing Assistance Scheme, 2023. arXiv 2023, arXiv:2301.02749. [Google Scholar] [CrossRef]
- Yarin, A. Mathematical Modeling in Continuum Mechanics, R. Temam and A. Miranville. Cambridge University Press, Cambridge, 2000. Int. J. Multiph. Flow 2002, 28, 881–883. [Google Scholar] [CrossRef]
- ISO 13482:2014; Robots and Robotic Devices—Safety Requirements for Personal Care Robots. International Organization for Standardization: Geneva, Switzerland, 2014.
- Huang, Z.; Hu, Y.; Du, T.; Zhou, S.; Su, H.; Tenenbaum, J.B.; Gan, C. Plasticinelab: A soft-body manipulation benchmark with differentiable physics. arXiv 2021, arXiv:2104.03311. [Google Scholar]
- Huang, I.; Narang, Y.; Eppner, C.; Sundaralingam, B.; Macklin, M.; Bajcsy, R.; Hermans, T.; Fox, D. DefGraspSim: Physics-Based Simulation of Grasp Outcomes for 3D Deformable Objects. IEEE Robot. Autom. Lett. 2022, 7, 6274–6281. [Google Scholar] [CrossRef]
- Ye, R.; Xu, W.; Fu, H.; Jenamani, R.K.; Nguyen, V.; Lu, C.; Dimitropoulou, K.; Bhattacharjee, T. RCare World: A Human-centric Simulation World for Caregiving Robots. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022. [Google Scholar]
- Roy, A.; Bera, R.K. Linear and Non-Linear Deformations of Elastic Solids; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L. The Finite Element Method for Solid and Structural Mechanics; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Georgii, J.; Westermann, R. Mass-spring systems on the GPU. Simul. Model. Pract. Theory 2005, 13, 693–702. [Google Scholar] [CrossRef]
- Tan, Q.; Pan, Z.; Gao, L.; Manocha, D. Realtime Simulation of Thin-Shell Deformable Materials Using CNN-Based Mesh Embedding. IEEE Robot. Autom. Lett. 2020, 5, 2325–2332. [Google Scholar] [CrossRef]
- Mitusch, S.K.; Funke, S.W.; Kuchta, M. Hybrid FEM-NN models: Combining artificial neural networks with the finite element method. J. Comput. Phys. 2021, 446, 110651. [Google Scholar] [CrossRef]
- Bullet Physics Library. Available online: https://pybullet.org/ (accessed on 15 October 2023).
- Faure, F.; Duriez, C.; Delingette, H.; Allard, J.; Gilles, B.; Marchesseau, S.; Talbot, H.; Courtecuisse, H.; Bousquet, G.; Peterlik, I.; et al. SOFA: A Multi-Model Framework for Interactive Physical Simulation. In Studies in Mechanobiology, Tissue Engineering and Biomaterials; Springer: Berlin/Heidelberg, Germany, 2012; pp. 283–321. [Google Scholar]
- Seita, D.; Florence, P.; Tompson, J.; Coumans, E.; Sindhwani, V.; Goldberg, K.; Zeng, A. Learning to Rearrange Deformable Cables, Fabrics, and Bags with Goal-Conditioned Transporter Networks. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Laezza, R.; Gieselmann, R.; Pokorny, F.T.; Karayiannidis, Y. ReForm: A Robot Learning Sandbox for Deformable Linear Object Manipulation. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Ramisa, A.; Alenyà, G.; Moreno-Noguer, F.; Torras, C. Learning RGB-D descriptors of garment parts for informed robot grasping. Eng. Appl. Artif. Intell. 2014, 35, 246–258. [Google Scholar] [CrossRef]
- Song, Y.; Wen, J.; Liu, D.; Yu, C. Deep Robotic Grasping Prediction with Hierarchical RGB-D Fusion. Int. J. Control Autom. Syst. 2022, 20, 243–254. [Google Scholar] [CrossRef]
- Ma, X.; Hsu, D.; Lee, W.S. Learning Latent Graph Dynamics for Visual Manipulation of Deformable Objects. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), IEEE, Philadelphia, PA, USA, 23–27 May 2022. [Google Scholar]
- Rusinkiewicz, S.; Hall-Holt, O.; Levoy, M. Real-time 3D model acquisition. In Proceedings of the 29th Annual Conference on Computer Graphics and Interactive Techniques, San Antonio, TX, USA, 23–26 July 2002. [Google Scholar]
- Del Bue, A.; Llad, X.; Agapito, L. Non-Rigid Metric Shape and Motion Recovery from Uncalibrated Images Using Priors. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition—Volume 1 (CVPR’06), New York, NY, USA, 17–22 June 2006. [Google Scholar]
- Dahiya, R.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing—From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Bicchi, A. Force distribution in multiple whole-limb manipulation. In Proceedings of the 1993 IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993. [Google Scholar]
- Kaboli, M.; Yao, K.; Feng, D.; Cheng, G. Tactile-based active object discrimination and target object search in an unknown workspace. Auton. Robot. 2018, 43, 123–152. [Google Scholar] [CrossRef]
- Kemp, C.; Edsinger, A.; Torres-Jara, E. Challenges for robot manipulation in human environments [Grand Challenges of Robotics]. IEEE Robot. Autom. Mag. 2007, 14, 20–29. [Google Scholar] [CrossRef]
- Bekiroglu, Y.; Laaksonen, J.; Jorgensen, J.A.; Kyrki, V.; Kragic, D. Assessing Grasp Stability Based on Learning and Haptic Data. IEEE Trans. Robot. 2011, 27, 616–629. [Google Scholar] [CrossRef]
- Calandra, R.; Owens, A.; Upadhyaya, M.; Yuan, W.; Lin, J.; Adelson, E.; Levine, S. The Feeling of Success: Does Touch Sensing Help Predict Grasp Outcomes? arXiv 2017, arXiv:1710.05512. [Google Scholar]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Cham, Switzerland, 2016. [Google Scholar]
- International Conference on Multisensor Fusion and Integration for Intelligent Systems [front matter]. In Proceedings of the 1996 IEEE/SICE/RSJ International Conference on Multisensor Fusion and Integration for Intelligent Systems (Cat. No.96TH8242), Washington, DC, USA, 8–11 December 1996; pp. i–xv. [CrossRef]
- O’Doherty, J.E.; Lebedev, M.A.; Ifft, P.J.; Zhuang, K.Z.; Shokur, S.; Bleuler, H.; Nicolelis, M.A.L. Active tactile exploration using a brain–machine–brain interface. Nature 2011, 479, 228–231. [Google Scholar] [CrossRef] [PubMed]
- Li, R.; Peng, B. Implementing Monocular Visual-Tactile Sensors for Robust Manipulation. Cyborg Bionic Syst. 2022, 2022, 9797562. [Google Scholar] [CrossRef]
- Uneri, A.; Balicki, M.A.; Handa, J.; Gehlbach, P.; Taylor, R.H.; Iordachita, I. New steady-hand Eye Robot with micro-force sensing for vitreoretinal surgery. In Proceedings of the 2010 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan, 26–29 September 2010. [Google Scholar]
- Luo, Y.; Nelson, B.J. Fusing force and vision feedback for manipulating deformable objects. J. Robot. Syst. 2001, 18, 103–117. [Google Scholar] [CrossRef]
- Choi, S.H.; Tahara, K. Dexterous object manipulation by a multi-fingered robotic hand with visual-tactile fingertip sensors. ROBOMECH J. 2020, 7, 14. [Google Scholar] [CrossRef]
- Inceoglu, A.; Aksoy, E.E.; Cihan Ak, A.; Sariel, S. FINO-Net: A Deep Multimodal Sensor Fusion Framework for Manipulation Failure Detection. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021. [Google Scholar]
- Wang, C.; Zhang, Y.; Zhang, X.; Wu, Z.; Zhu, X.; Jin, S.; Tang, T.; Tomizuka, M. Offline-Online Learning of Deformation Model for Cable Manipulation With Graph Neural Networks. IEEE Robot. Autom. Lett. 2022, 7, 5544–5551. [Google Scholar] [CrossRef]
- Zlatintsi, A.; Dometios, A.; Kardaris, N.; Rodomagoulakis, I.; Koutras, P.; Papageorgiou, X.; Maragos, P.; Tzafestas, C.; Vartholomeos, P.; Hauer, K.; et al. I-Support: A robotic platform of an assistive bathing robot for the elderly population. Robot. Auton. Syst. 2020, 126, 103451. [Google Scholar] [CrossRef]
- Bhattacharjee, T.; Gordon, E.K.; Scalise, R.; Cabrera, M.E.; Caspi, A.; Cakmak, M.; Srinivasa, S.S. Is More Autonomy Always Better? In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambrdige, UK, 23–26 March 2020. [Google Scholar]
- Kober, J.; Peters, J. Reinforcement Learning in Robotics: A Survey. In Adaptation, Learning, and Optimization; Springer: Berlin/Heidelberg, Germany, 2012; pp. 579–610. [Google Scholar]
- Nguyen, H.; La, H. Review of Deep Reinforcement Learning for Robot Manipulation. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019. [Google Scholar]
- Vieira, A.; Ribeiro, B. Reinforcement Learning and Robotics. In Introduction to Deep Learning Business Applications for Developers; Apress: Berkeley, CA, USA, 2018; pp. 137–168. [Google Scholar]
- Florence, P.; Manuelli, L.; Tedrake, R. Self-Supervised Correspondence in Visuomotor Policy Learning. IEEE Robot. Autom. Lett. 2020, 5, 492–499. [Google Scholar] [CrossRef]
- Qin, Y.; Wu, Y.H.; Liu, S.; Jiang, H.; Yang, R.; Fu, Y.; Wang, X. DexMV: Imitation Learning for Dexterous Manipulation from Human Videos. In Lecture Notes in Computer Science; Springer Nature: Cham, Switzerland, 2022; pp. 570–587. [Google Scholar]
- Zhang, X.; Sun, L.; Kuang, Z.; Tomizuka, M. Learning Variable Impedance Control via Inverse Reinforcement Learning for Force-Related Tasks. IEEE Robot. Autom. Lett. 2021, 6, 2225–2232. [Google Scholar] [CrossRef]
- Zakka, K.; Zeng, A.; Florence, P.; Tompson, J.; Bohg, J.; Dwibedi, D. XIRL: Cross-embodiment Inverse Reinforcement Learning. Proc. Mach. Learn. Res. 2021, 164, 537–546. [Google Scholar]
- Das, N.; Bechtle, S.; Davchev, T.; Jayaraman, D.; Rai, A.; Meier, F. Model-Based Inverse Reinforcement Learning from Visual Demonstrations. Proc. Mach. Learn. Res. 2021, 155, 1930–1942. [Google Scholar]
- Hu, Z.; Han, T.; Sun, P.; Pan, J.; Manocha, D. 3-D Deformable Object Manipulation Using Deep Neural Networks. IEEE Robot. Autom. Lett. 2019, 4, 4255–4261. [Google Scholar] [CrossRef]
- Whitman, J.; Bhirangi, R.; Travers, M.; Choset, H. Modular Robot Design Synthesis with Deep Reinforcement Learning. Proc. AAAI Conf. Artif. Intell. 2020, 34, 10418–10425. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Tobin, J.; Fong, R.; Ray, A.; Schneider, J.; Zaremba, W.; Abbeel, P. Domain randomization for transferring deep neural networks from simulation to the real world. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Hansen, E.B.; Andersen, R.E.; Madsen, S.; Bogh, S. Transferring Human Manipulation Knowledge to Robots with Inverse Reinforcement Learning. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020. [Google Scholar]
- Cheney, N.; Bongard, J.; Lipson, H. Evolving Soft Robots in Tight Spaces. In Proceedings of the 2015 Annual Conference on Genetic and Evolutionary Computation, Madrid, Spain, 11–15 July 2015; pp. 935–942. [Google Scholar] [CrossRef]
- Brinkmann, A.; Böhlen, C.F.v.; Kowalski, C.; Lau, S.; Meyer, O.; Diekmann, R.; Hein, A. Providing physical relief for nurses by collaborative robotics. Sci. Rep. 2022, 12, 8644. [Google Scholar] [CrossRef]
- Cretu, A.M.; Payeur, P.; Petriu, E.M. Soft Object Deformation Monitoring and Learning for Model-Based Robotic Hand Manipulation. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2012, 42, 740–753. [Google Scholar] [CrossRef]
- Zaidi, S.; Maselli, M.; Laschi, C.; Cianchetti, M. Actuation Technologies for Soft Robot Grippers and Manipulators: A Review. Curr. Robot. Rep. 2021, 2, 355–369. [Google Scholar] [CrossRef]
- Ju, F.; Wang, Y.; Xie, B.; Mi, Y.; Zhao, M.; Cao, J. The Use of Sports Rehabilitation Robotics to Assist in the Recovery of Physical Abilities in Elderly Patients with Degenerative Diseases: A Literature Review. Healthcare 2023, 11, 326. [Google Scholar] [CrossRef]
- Ehrampoosh, A.; Shirinzadeh, B.; Pinskier, J.; Smith, J.; Moshinsky, R.; Zhong, Y. A Force-Feedback Methodology for Teleoperated Suturing Task in Robotic-Assisted Minimally Invasive Surgery. Sensors 2022, 22, 7829. [Google Scholar] [CrossRef] [PubMed]
- Lederman, S.J.; Klatzky, R.L. Haptic perception: A tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef]
- Si, W.; Wang, N.; Yang, C. A review on manipulation skill acquisition through teleoperation-based learning from demonstration. Cogn. Comput. Syst. 2021, 3, 1–16. [Google Scholar] [CrossRef]
- Gao, Y.; Huang, X.; Mann, I.S.; Su, H.J. A novel variable stiffness compliant robotic gripper based on layer jamming. J. Mech. Robot. 2020, 12, 051013. [Google Scholar] [CrossRef]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and prospects of the human–robot collaboration. Auton. Robot. 2018, 42, 957–975. [Google Scholar] [CrossRef]
- Dollar, A.M.; Howe, R.D. The Highly Adaptive SDM Hand: Design and Performance Evaluation. Int. J. Robot. Res. 2010, 29, 585–597. [Google Scholar] [CrossRef]
- Zinn, M.; Roth, B.; Khatib, O.; Salisbury, J.K. A New Actuation Approach for Human Friendly Robot Design. Int. J. Robot. Res. 2004, 23, 379–398. [Google Scholar] [CrossRef]
- Mutlu, B.; Forlizzi, J. Robots in organizations: The role of workflow, social, and environmental factors in human-robot interaction. In Proceedings of the 2008 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI), Amsterdam, The Netherlands, 12–15 March 2008; pp. 287–294. [Google Scholar] [CrossRef]
- Heerink, M.; Kröse, B.; Evers, V.; Wielinga, B. Assessing Acceptance of Assistive Social Agent Technology by Older Adults: The Almere Model. Int. J. Soc. Robot. 2010, 2, 361–375. [Google Scholar] [CrossRef]
- Bennett, C.C.; Sabanovic, S.; Piatt, J.A.; Nagata, S.; Eldridge, L.; Randall, N. A Robot a Day Keeps the Blues Away. In Proceedings of the 2017 IEEE International Conference on Healthcare Informatics (ICHI), Park City, UT, USA, 23–26 August 2017. [Google Scholar]
- Rosenthal-von der Pütten, A.M.; Krämer, N.C. How design characteristics of robots determine evaluation and uncanny valley related responses. Comput. Hum. Behav. 2014, 36, 422–439. [Google Scholar] [CrossRef]
- Dautenhahn, K. Socially intelligent robots: Dimensions of human–robot interaction. Philos. Trans. R. Soc. B Biol. Sci. 2007, 362, 679–704. [Google Scholar] [CrossRef] [PubMed]
- Sabanovic, S.; Bennett, C.C.; Chang, W.L.; Huber, L. PARO robot affects diverse interaction modalities in group sensory therapy for older adults with dementia. In Proceedings of the 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013. [Google Scholar]
- Beresford, A.; Stajano, F. Location privacy in pervasive computing. IEEE Pervasive Comput. 2003, 2, 46–55. [Google Scholar] [CrossRef]
- Vaidya, J.; Clifton, C. Privacy-preserving data mining: Why, how, and when. IEEE Secur. Priv. Mag. 2004, 2, 19–27. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Zhu, J. Deformable Object Manipulation in Caregiving Scenarios: A Review. Machines 2023, 11, 1013. https://doi.org/10.3390/machines11111013
Wang L, Zhu J. Deformable Object Manipulation in Caregiving Scenarios: A Review. Machines. 2023; 11(11):1013. https://doi.org/10.3390/machines11111013
Chicago/Turabian StyleWang, Liman, and Jihong Zhu. 2023. "Deformable Object Manipulation in Caregiving Scenarios: A Review" Machines 11, no. 11: 1013. https://doi.org/10.3390/machines11111013