
Texture Identification and Object Recognition Using a Soft Robotic Hand Innervated Bio-Inspired Proprioception


Abstract
:1. Introduction
2. Materials and Methods
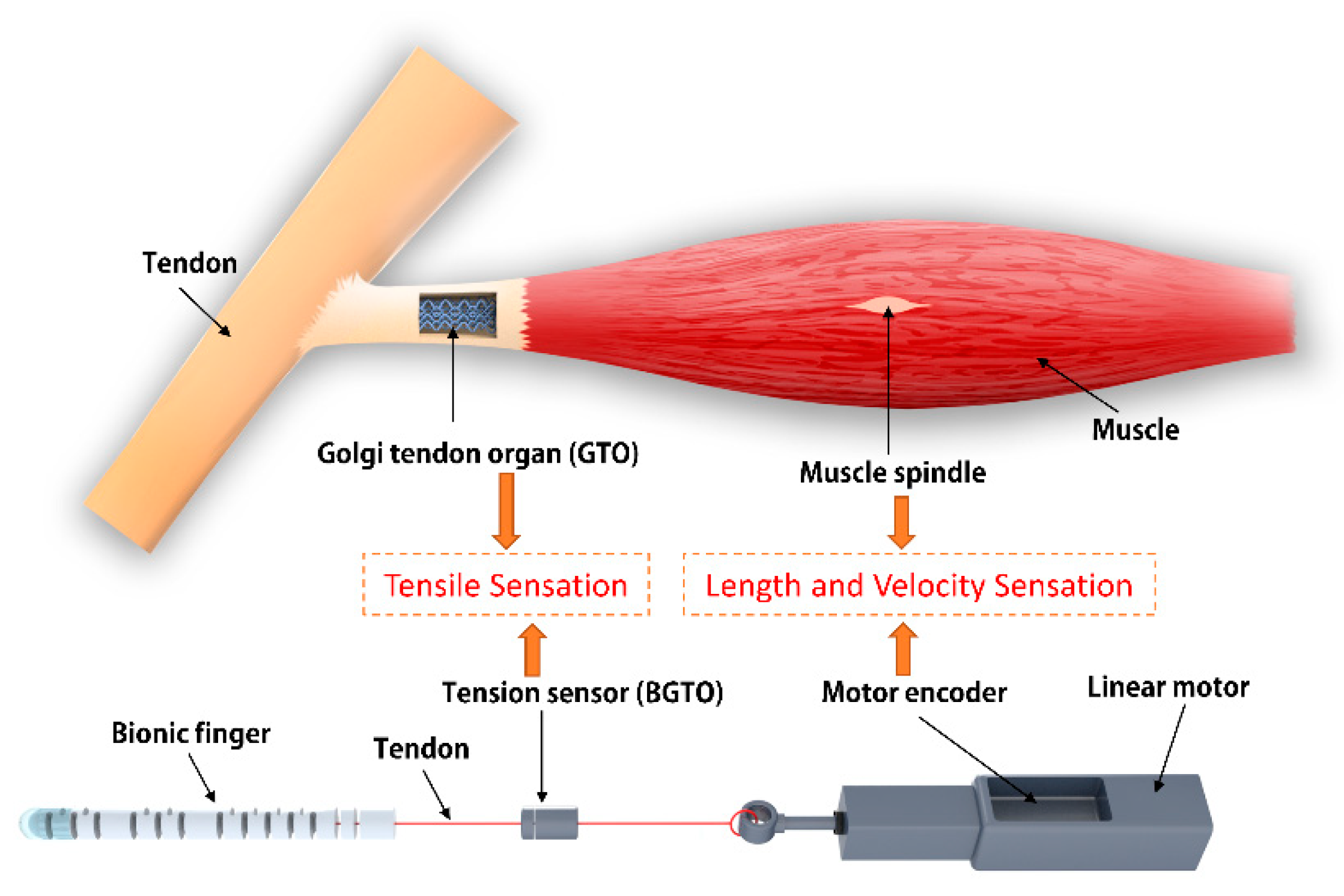
2.1. Inspiration
2.2. Design Overview of the System
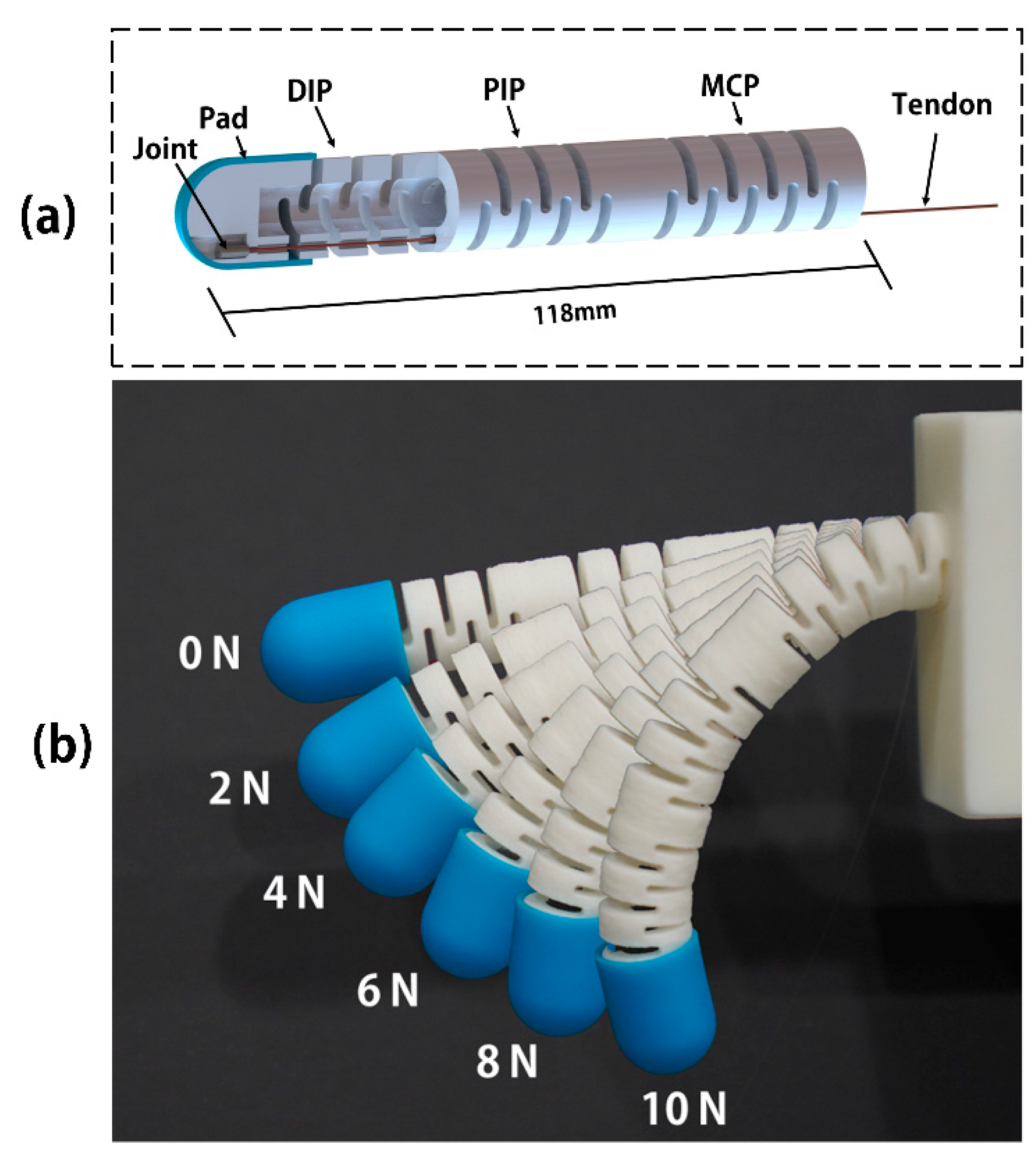
2.2.1. The Tendon-Driven Finger
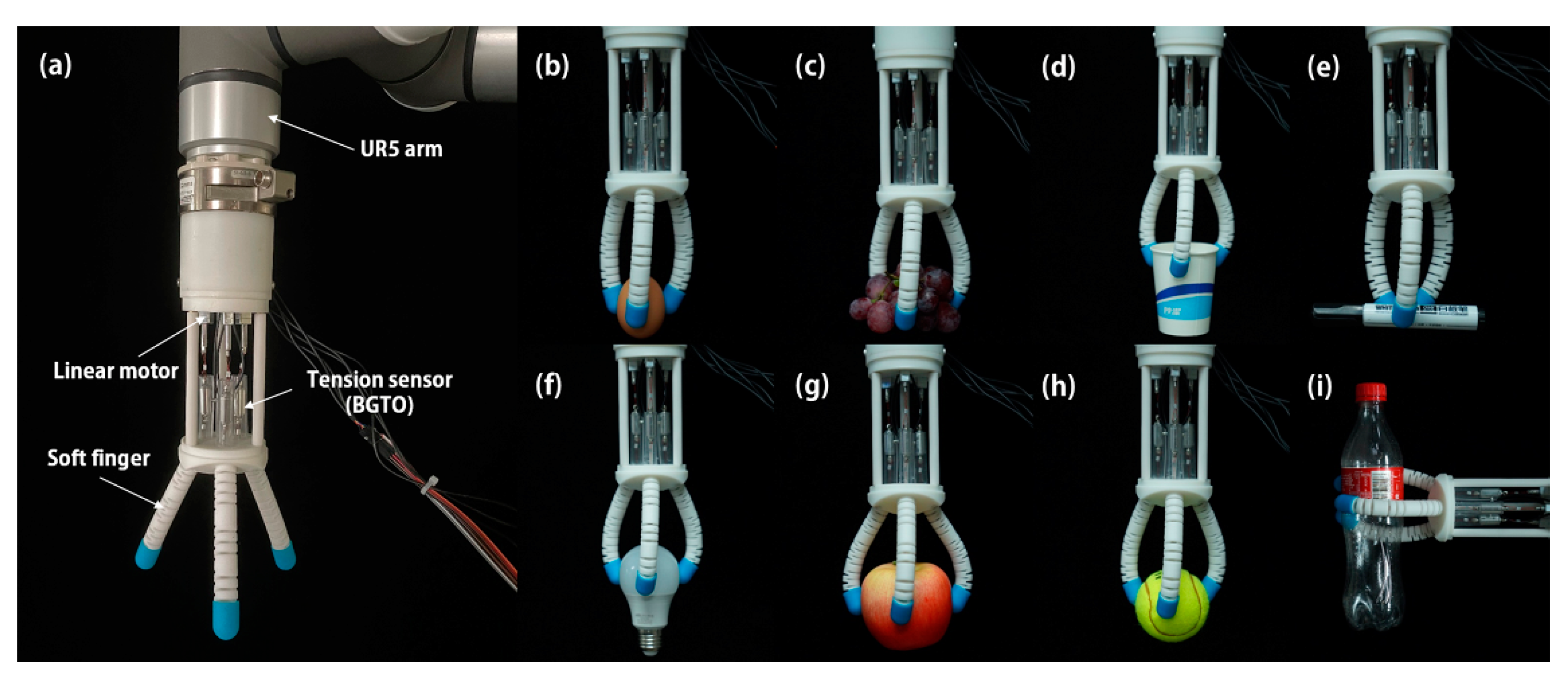
2.2.2. The Soft Hand
2.3. Experiments
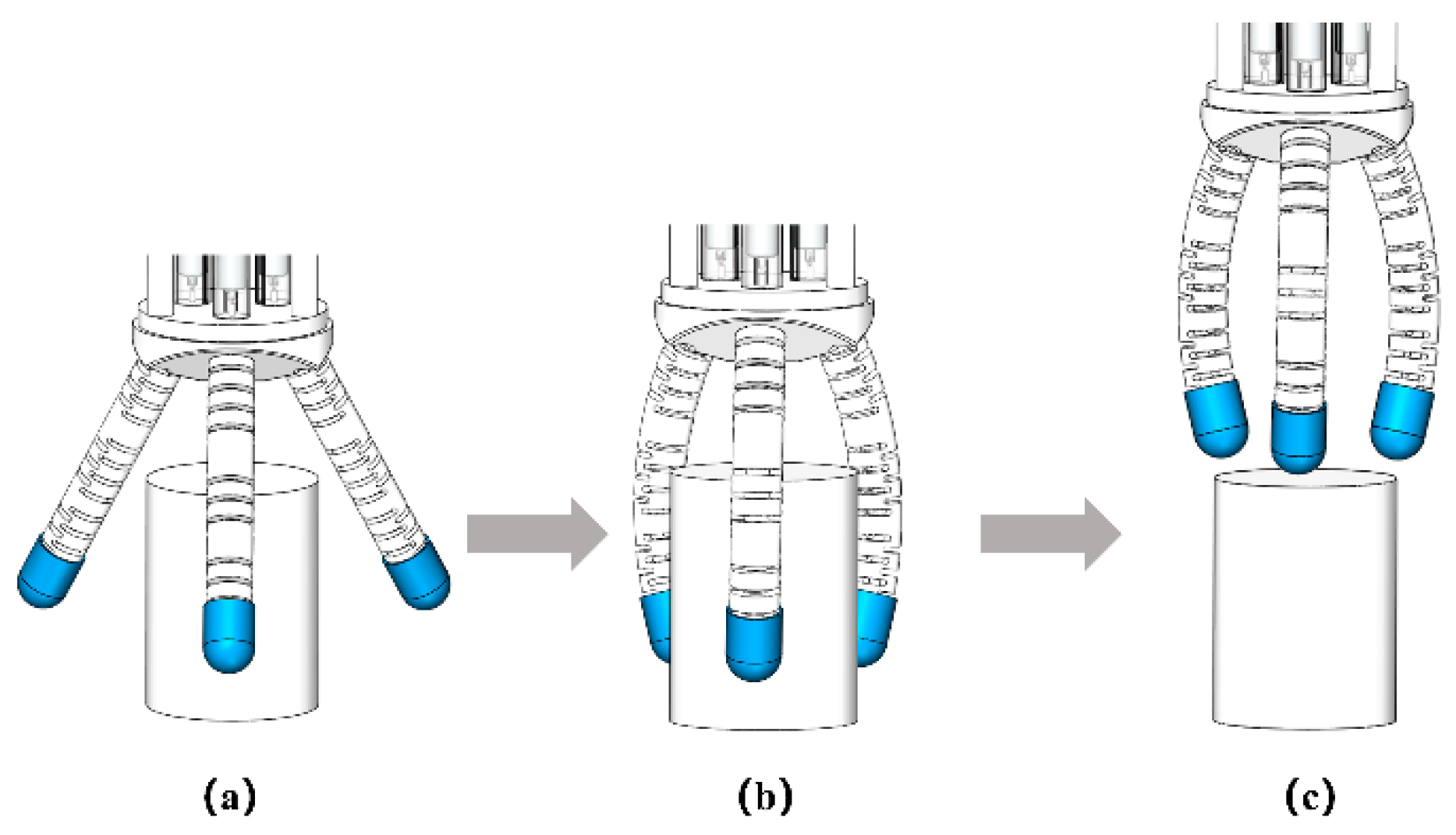
2.3.1. Basic Grasp Ability of the Soft Hand
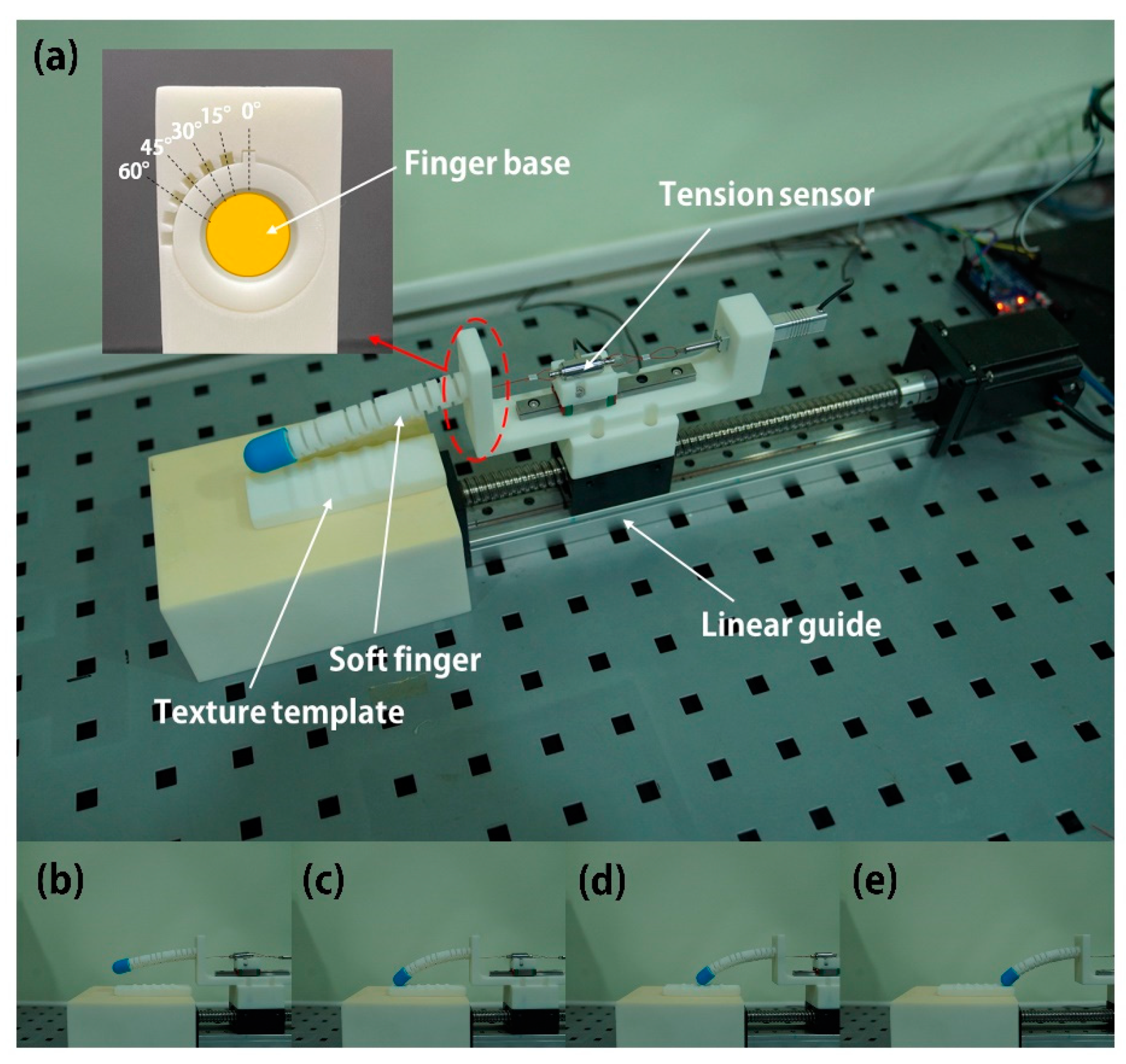
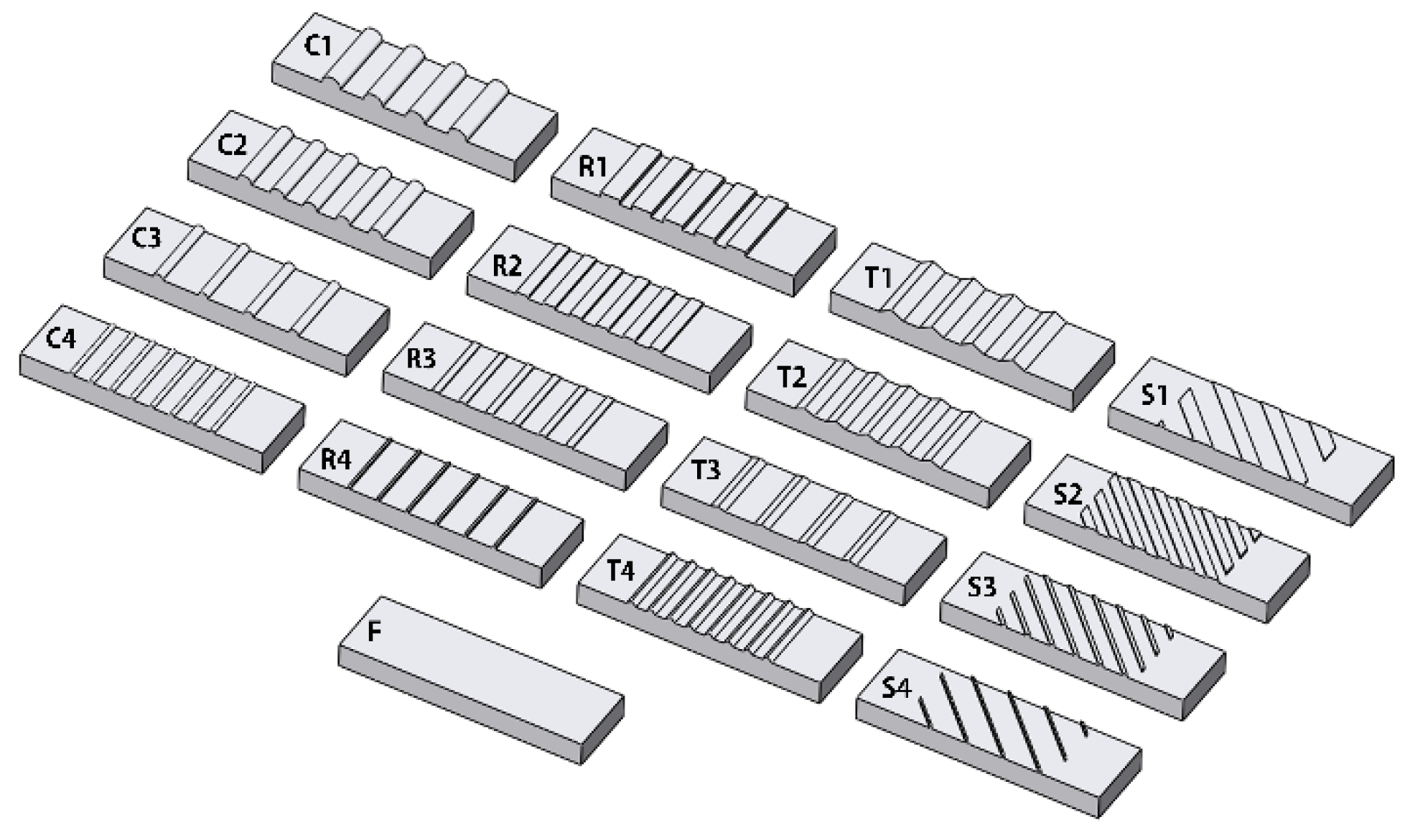
2.3.2. Textures Identification
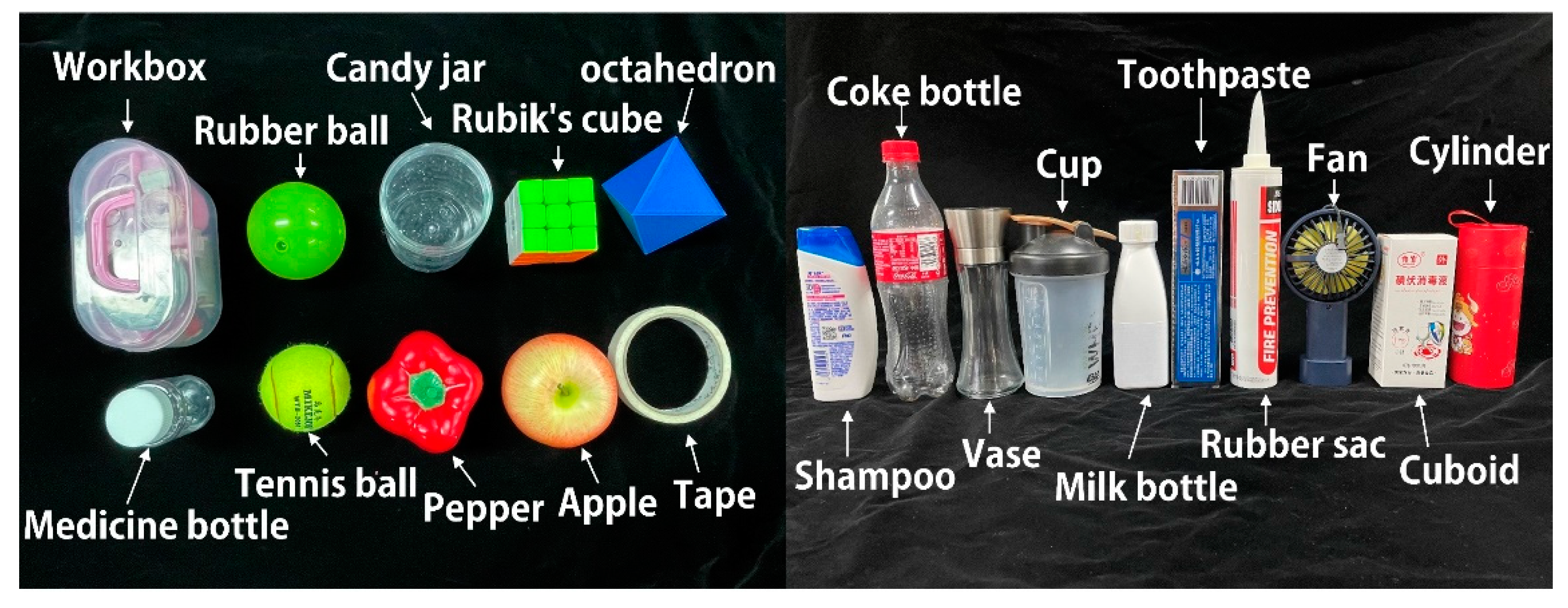
2.3.3. Recognizing Objects Varied in Shape
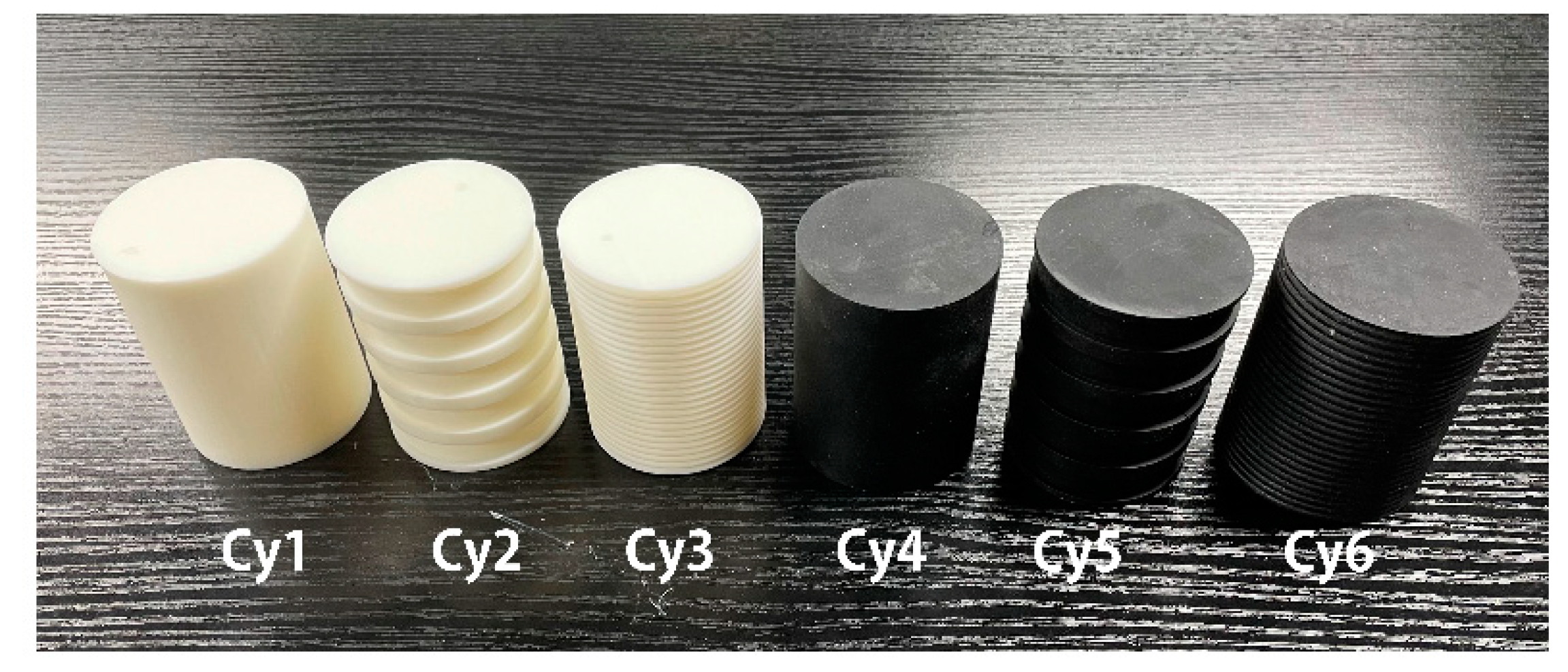
2.3.4. Recognizing Objects with Similar Dimension
3. Results
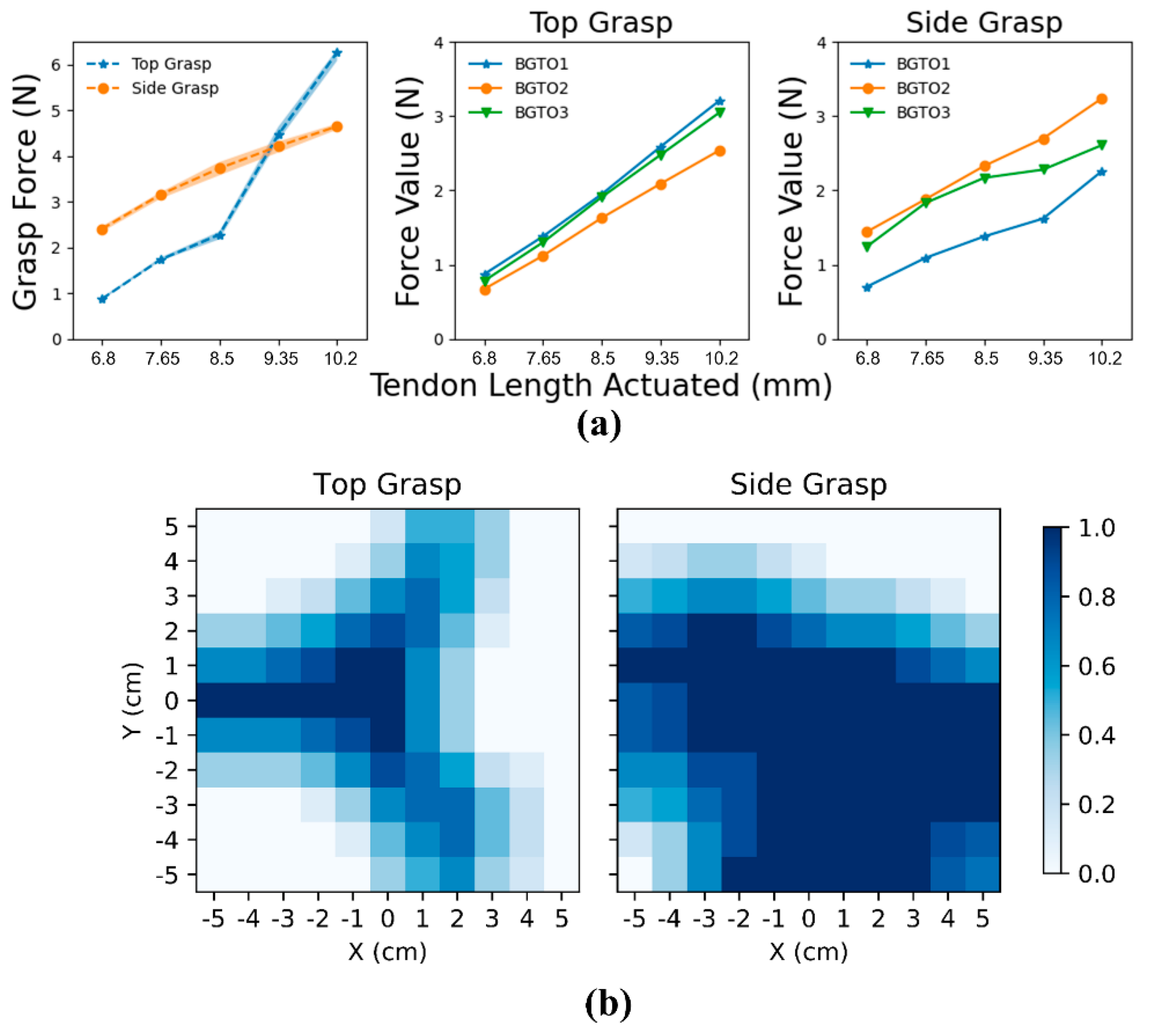
3.1. Basic Grasp Ability
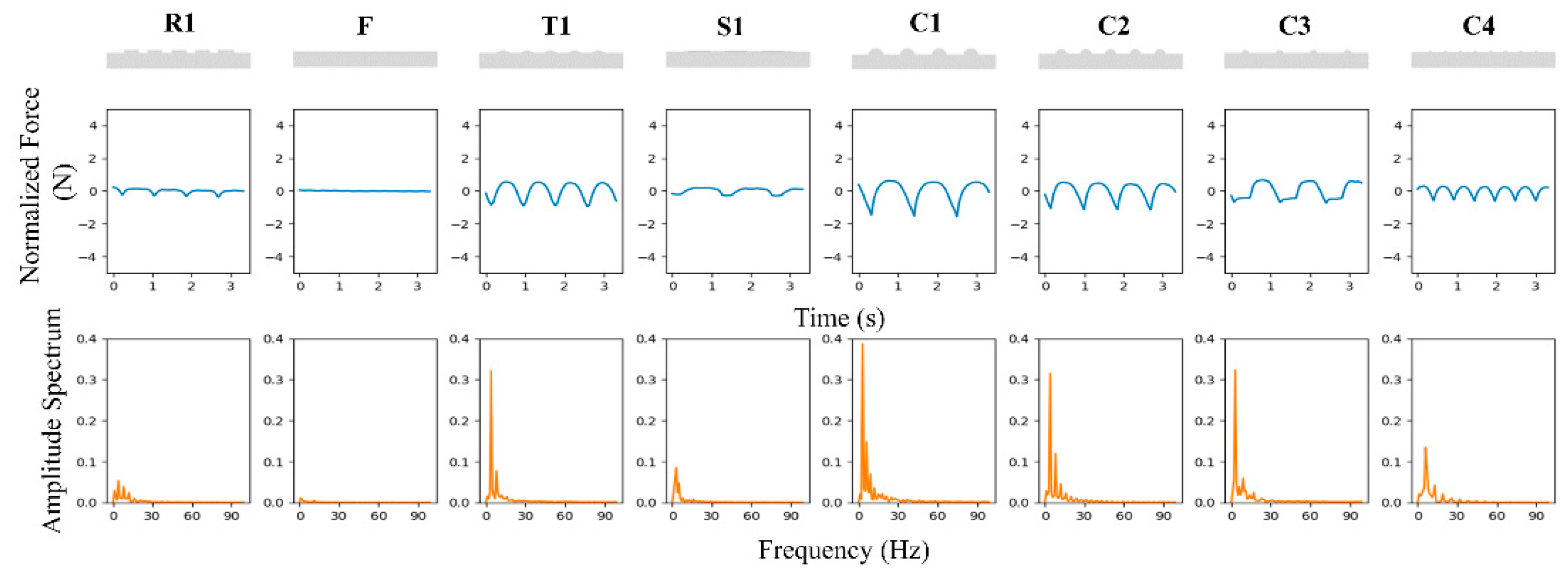
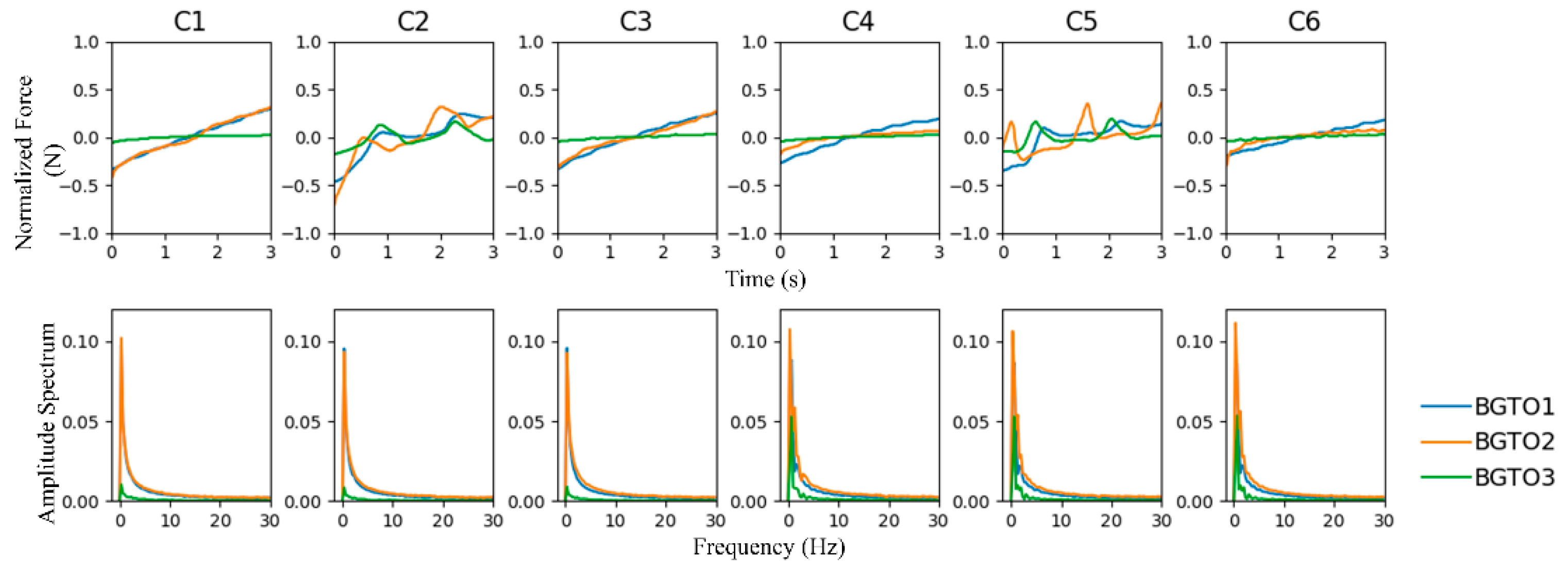
3.2. Textures Identification
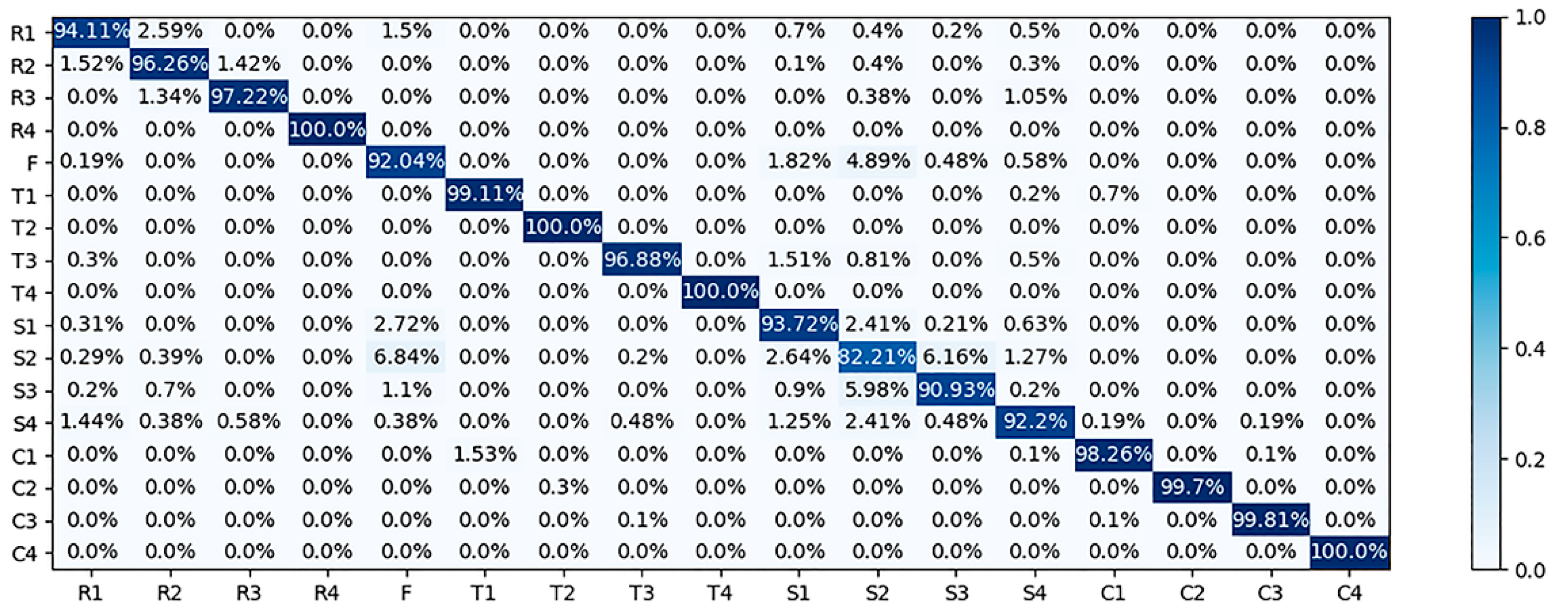
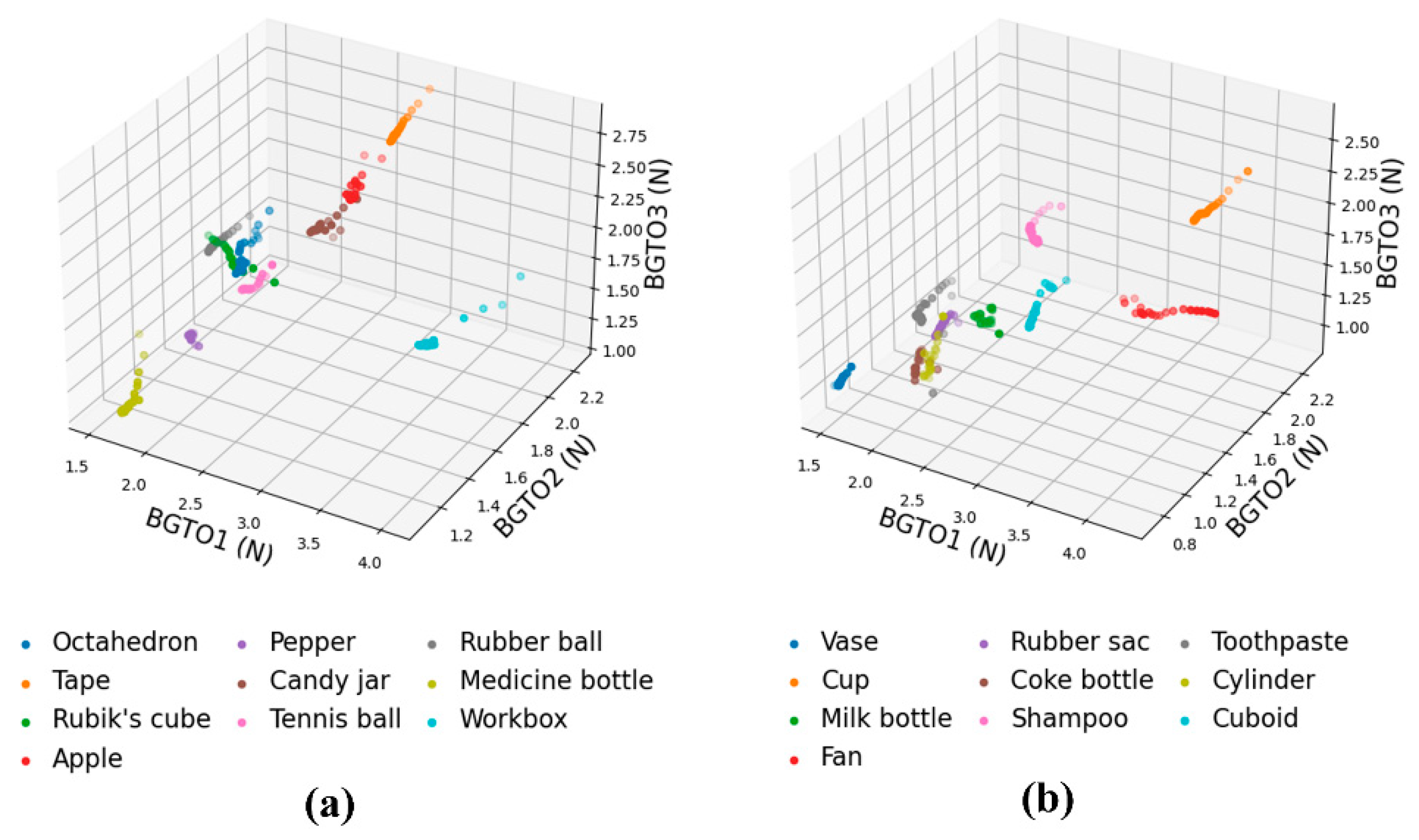
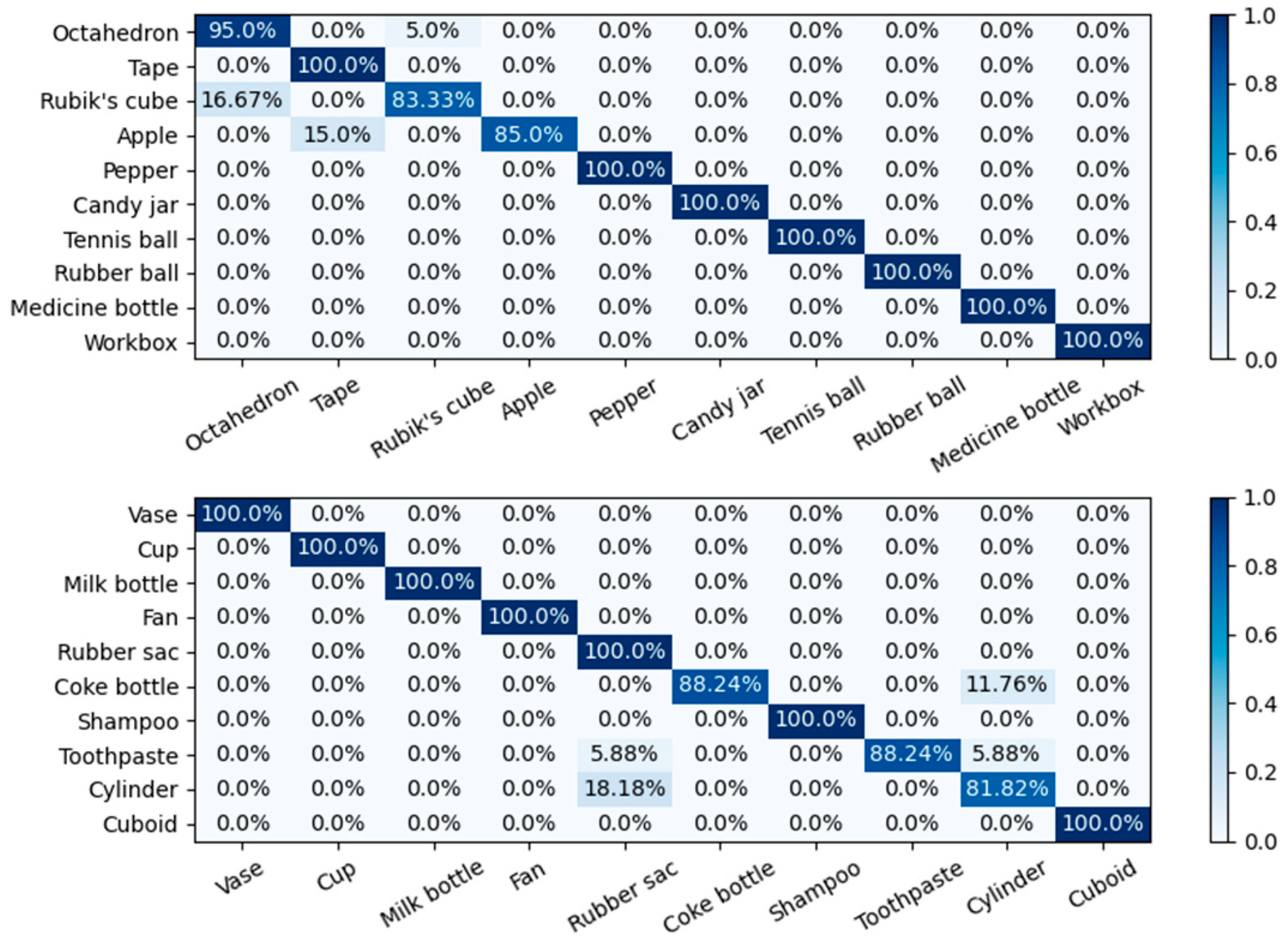
3.3. Recognizing Objects Varied in Shape
3.4. Recognizing Objects with Similar Dimension
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deimel, R.; Brock, R. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Hao, Y.; Biswas, S.; Hawkes, E.W.; Wang, T.; Zhu, M.; Wen, L.; Visell, Y. A Multimodal, Enveloping Soft Gripper: Shape Conformation, Bioinspired Adhesion, and Expansion-Driven Suction. IEEE Trans. Robot. 2021, 37, 350–362. [Google Scholar] [CrossRef]
- Manti, M.; Hassan, T.; Passetti, G.; D’Elia, N.; Laschi, C.; Cianchetti, M. A Bioinspired Soft Robotic Gripper for Adaptable and Effective Grasping. Soft Robot. 2015, 2, 107–116. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Gharaie, S.; Gregory, J.; Bodaghi, M.; Kaynak, A.; Nahavandi, S. A Bioinspired Compliant 3D-Printed Soft Gripper. Soft Robot. 2021. [Google Scholar] [CrossRef] [PubMed]
- Yarali, E.; Baniasadi, M.; Zolfagharian, A.; Chavoshi, M.; Arefi, F.; Hossain, M.; Bastola, A.; Ansari, M.; Foyouzat, A.; Dabbagh, A.; et al. Magneto-/electro-responsive polymers toward manufacturing, characterization, and biomedical/soft robotic applications. Appl. Mater. Today 2021, 26, 101306. [Google Scholar] [CrossRef]
- Abondance, S.; Teeple, C.B.; Wood, R.J. A Dexterous Soft Robotic Hand for Delicate In-Hand Manipulation. IEEE Robot. Autom. Lett. 2020, 5, 5502–5509. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, X.; Chang, U.; Lu, J.-T.; Leung, C.C.Y.; Chen, Y.; Hu, Y.; Wang, Z. A Soft-Robotic Approach to Anthropomorphic Robotic Hand Dexterity. IEEE Access 2019, 7, 101483–101495. [Google Scholar] [CrossRef]
- Zhou, J.; Yi, J.; Chen, X.; Liu, Z.; Wang, Z. BCL-13: A 13-DOF Soft Robotic Hand for Dexterous Grasping and In-Hand Manipulation. IEEE Robot. Autom. Lett. 2018, 3, 3379–3386. [Google Scholar] [CrossRef]
- Zhe, X.; Todorov, E. Design of a highly biomimetic anthropomorphic robotic hand towards artificial limb regeneration. In Proceedings of the 2016 the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing—From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Dahiya, R.; Mittendorfer, P.; Valle, M.; Cheng, G.; Lumelsky, V.J. Directions toward Effective Utilization of Tactile Skin: A Review. IEEE Sens. J. 2013, 13, 4121–4138. [Google Scholar] [CrossRef]
- Rasouli, M.; Chen, Y.; Basu, A.; Kukreja, S.L.; Thakor, N.V. An Extreme Learning Machine-Based Neuromorphic Tactile Sensing System for Texture Recognition. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 313–325. [Google Scholar] [CrossRef]
- Cao, Y.; Li, T.; Gu, Y.; Luo, H.; Wang, S.; Zhang, T. Fingerprint-Inspired Flexible Tactile Sensor for Accurately Discerning Surface Texture. Small 2018, 14, e1703902. [Google Scholar] [CrossRef] [PubMed]
- Jamali, N.; Sammut, C. Majority Voting: Material Classification by Tactile Sensing Using Surface Texture. IEEE Trans. Robot. 2011, 27, 508–521. [Google Scholar] [CrossRef]
- Jamali, N.; Sammut, C. Slip prediction using Hidden Markov models: Multidimensional sensor data to symbolic temporal pattern learning. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Sankar, S.; Balamurugan, D.; Brown, A.; Ding, K.; Xu, X.; Low, J.H.; Yeow, C.H.; Thakor, N. Texture Discrimination with a Soft Biomimetic Finger Using a Flexible Neuromorphic Tactile Sensor Array That Provides Sensory Feedback. Soft Robot. 2021, 8, 577–587. [Google Scholar] [CrossRef] [PubMed]
- Kuppuswamy, N.; Alspach, A.; Uttamchandani, A.; Creasey, S.; Ikeda, T.; Tedrake, R. Soft-bubble grippers for robust and perceptive manipulation. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Pastor, F.; Gandarias, J.M.; García-Cerezo, A.J.; Gómez-De-Gabriel, J.M. Using 3D Convolutional Neural Networks for Tactile Object Recognition with Robotic Palpation. Sensors 2019, 19, 5356. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amjadi, M.; Kyung, K.-U.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef] [Green Version]
- To, C.; Hellebrekers, T.L.; Park, Y.-L. Highly stretchable optical sensors for pressure, strain, and curvature measurement. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 5898–5903. [Google Scholar]
- Homberg, B.S.; Katzschmann, R.K.; Dogar, M.R.; Rus, D. Robust proprioceptive grasping with a soft robot hand. Auton. Robot. 2018, 43, 681–696. [Google Scholar] [CrossRef] [Green Version]
- Scimeca, L.; Hughes, J.; Maiolino, P.; Iida, F. Model-free Soft-Structure Reconstruction for Proprioception using Tactile Arrays. IEEE Robot. Autom. Lett. 2019, 4, 2479–2484. [Google Scholar] [CrossRef]
- Truby, R.L.; Santina, C.D.; Robotics, D.R.J.I.; Letters, A. Distributed Proprioception of 3D Configuration in Soft, Sensorized Robots via Deep Learning. IEEE Robot. Autom. Lett. 2020, 5, 3299–3306. [Google Scholar] [CrossRef]
- Li, G.; Liu, S.; Wang, L.; Zhu, R. Skin-inspired quadruple tactile sensors integrated on a robot hand enable object recognition. Sci. Robot. 2020, 5, 8134. [Google Scholar] [CrossRef] [PubMed]
- Tuthill, J.C.; Azim, E.J.C.B.C. Proprioception. Curr. Biol. 2018, 28, R194. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grigg, P.; Finerman, G.A.; Riley, L.H. Joint-Position Sense after Total Hip Replacement. J. Bone Jt. Surg. 1973, 55, 1016–1025. [Google Scholar] [CrossRef]
- Clark, F.J.; Horch, K.W.; Bach, S.M.; Larson, G.F. Contributions of cutaneous and joint receptors to static knee-position sense in man. J. Neurophysiol. 1979, 42, 877–888. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Cheng, C.; Guan, M.; Zhang, J.; Wang, Y. A Soft Robotic Gripper Based on Bioinspired Fingers. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Guadalajara, Mexico, 26–30 July 2021; pp. 4570–4573. [Google Scholar]
- Guan, M.; Yan, Y.; Wang, Y. A Bio-inspired Variable-Stiffness Method Based on Antagonism. In Proceedings of the 2021 4th International Conference on Robotics, Control and Automation Engineering (RCAE), Wuhan, China, 4–6 November 2021; pp. 372–375. [Google Scholar]
- Deimel, R.; Brock, O. A compliant hand based on a novel pneumatic actuator. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2047–2053. [Google Scholar] [CrossRef]
- Kazemi, M.; Valois, J.-S.; Bagnell, J.A.; Pollard, N. Robust Object Grasping using Force Compliant Motion Primitives. In Robotics: Science and Systems VIII; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Sankar, S.; Brown, A.; Balamurugan, D.; Nguyen, H.; Iskarous, M.; Simcox, T.; Kumar, D.; Nakagawa, A.; Thakor, N. Texture Discrimination using a Flexible Tactile Sensor Array on a Soft Biomimetic Finger. In Proceedings of the 2019 IEEE SENSORS, Montreal, QC, Canada, 27–30 October 2019; Institute of Electrical and Electronics Engineers (IEEE): Montreal, QC, Canada, 2019; pp. 1–4. [Google Scholar]
- Miften, F.S.; Diykh, M.; Abdulla, S.; Siuly, S.; Green, J.H.; Deo, R.C. A new framework for classification of multi-category hand grasps using EMG signals. Artif. Intell. Med. 2021, 112, 102005. [Google Scholar] [CrossRef] [PubMed]
- Chamakura, L.; Saha, G. An instance voting approach to feature selection. Inf. Sci. 2019, 504, 449–469. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Set | Classifier | |||
|---|---|---|---|---|
| SVM-Linear | SVM-RBF | KNN | DTs | |
| DS1 | 43.73% | 98.97% | 99.85% | 98.21% |
| DS2 | 63.79% | 98.21% | 99.81% | 98.19% |
| DS3 | 60.53% | 91.38% | 97.89% | 94.61% |
| DS4 | 65.36% | 90.63% | 97.97% | 94.93% |
| DS5 | 64.50% | 84.28% | 96.02% | 91.92% |
| Grasp Type | Classifier | |||
|---|---|---|---|---|
| SVM-Linear | SVM-RBF | KNN | DTs | |
| Top grasp | 84.21% | 88.06% | 96.33% | 93.50% |
| Side grasp | 79.1% | 80.47% | 95.82% | 96.00% |
| Characteristics of Classification | Classifier | ||
|---|---|---|---|
| SVM-RBF | KNN | DTs | |
| Stiffness | 99.23% | 98.46% | 99.23% |
| Surface texture | 65.38% | 96.15% | 95.38% |
| Integrated stiffness and texture | 80.77% | 97.69% | 96.92% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Y.; Cheng, C.; Guan, M.; Zhang, J.; Wang, Y. Texture Identification and Object Recognition Using a Soft Robotic Hand Innervated Bio-Inspired Proprioception. Machines 2022, 10, 173. https://doi.org/10.3390/machines10030173
Yan Y, Cheng C, Guan M, Zhang J, Wang Y. Texture Identification and Object Recognition Using a Soft Robotic Hand Innervated Bio-Inspired Proprioception. Machines. 2022; 10(3):173. https://doi.org/10.3390/machines10030173
Chicago/Turabian StyleYan, Yadong, Chang Cheng, Mingjun Guan, Jianan Zhang, and Yu Wang. 2022. "Texture Identification and Object Recognition Using a Soft Robotic Hand Innervated Bio-Inspired Proprioception" Machines 10, no. 3: 173. https://doi.org/10.3390/machines10030173