
Use of Unmanned Aerial Vehicles for Building a House Risk Index of Mosquito-Borne Viral Diseases
 ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
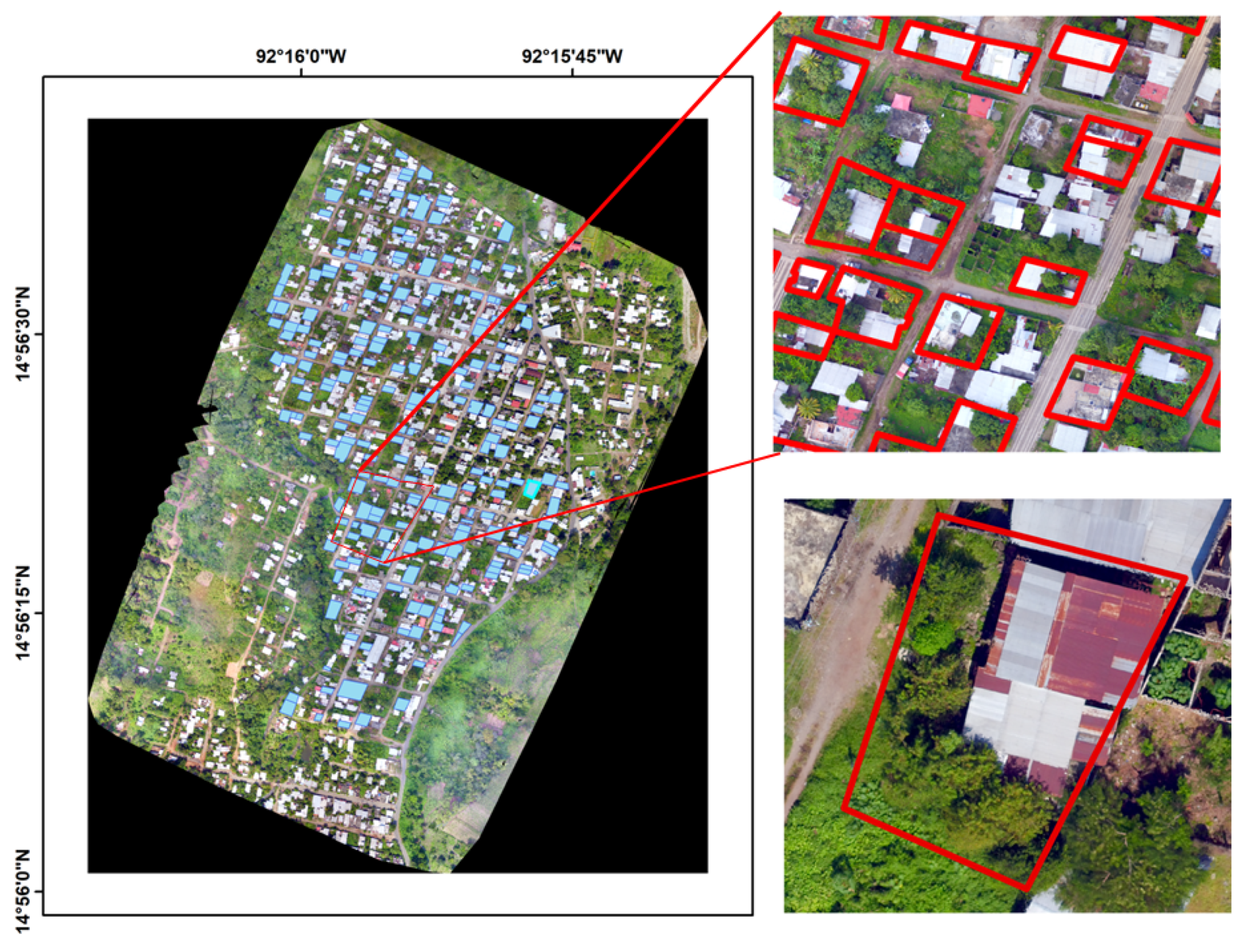
3.1. Study Area
3.2. Field Surveys
3.2.1. Premise Condition Index (PCI)
3.2.2. Entomological Survey for Adults of Ae. aegypti
3.2.3. Entomological Survey for Ae. aegypti Breeding Sites
3.2.4. Overcrowding
3.3. Drone Photography and Cartography Construction
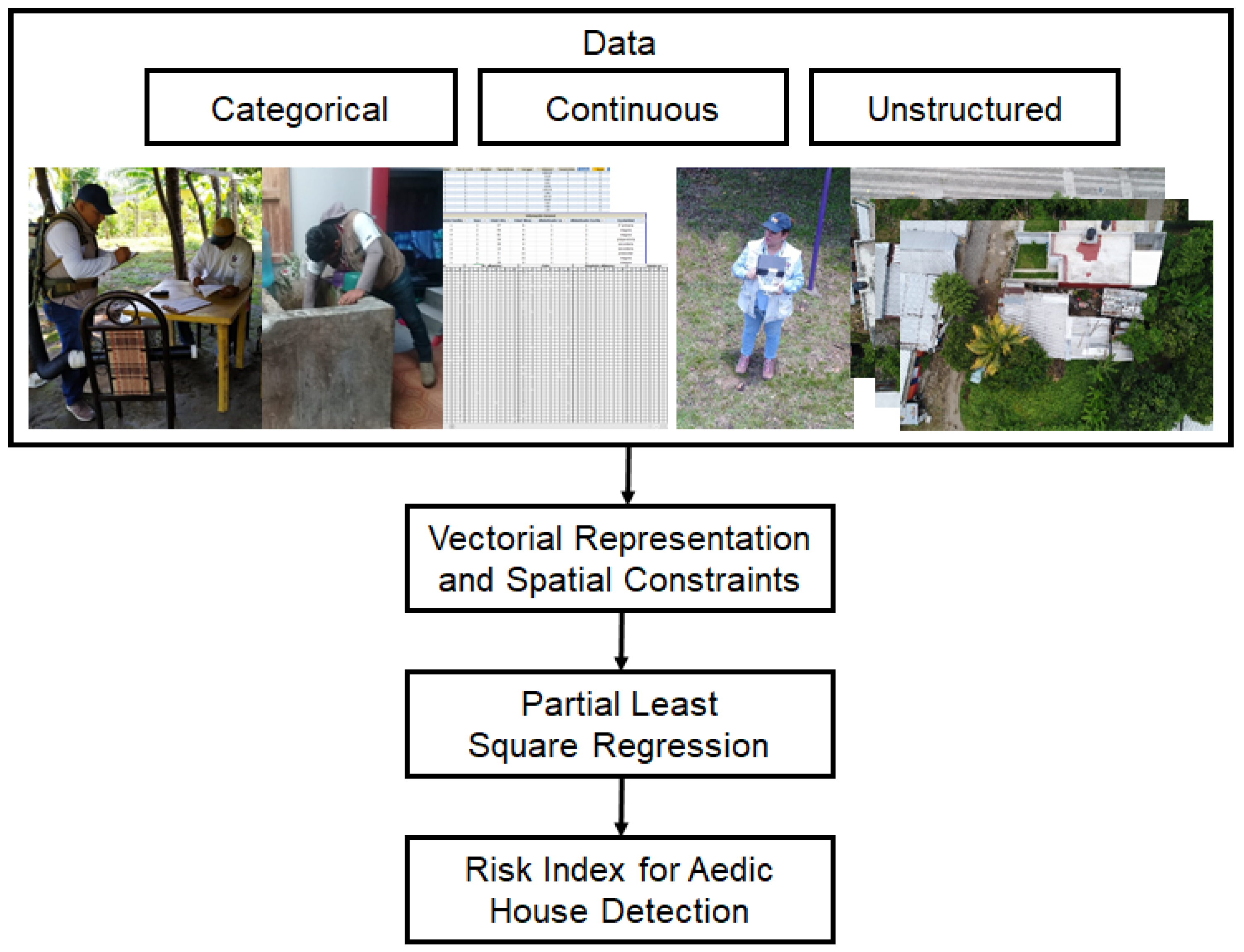
3.4. Methodology
3.4.1. Vectorial Representation of the Data
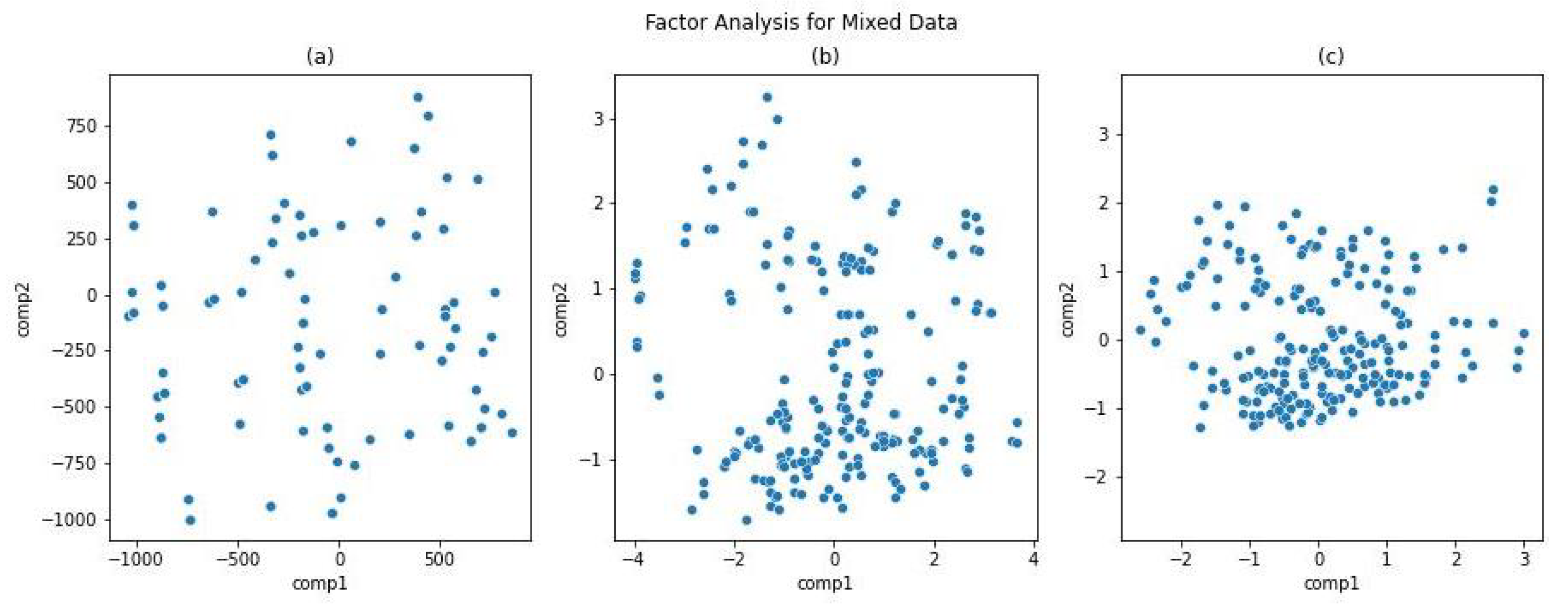
Factor Analysis for Mixed Data
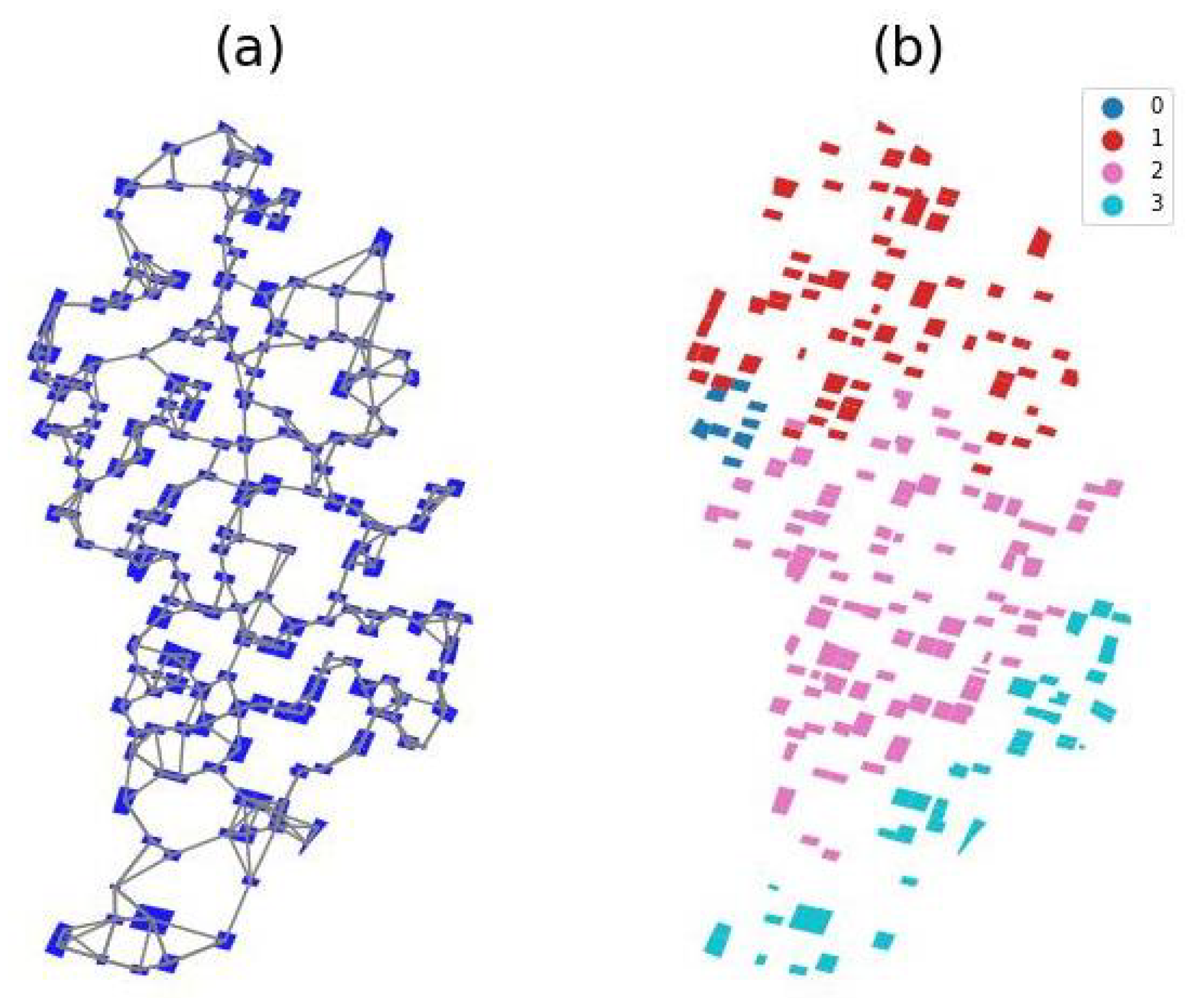
3.4.2. Spatial Constraints
3.4.3. Risk Index with Partial Least Squares
4. Results
- : 1
- : 4
- : 3
- : 2
- : 2
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Eskandari, R.; Mahdianpari, M.; Mohammadimanesh, F.; Salehi, B.; Brisco, B.; Homayouni, S. Meta-analysis of Unmanned Aerial Vehicle (UAV) Imagery for Agro-environmental Monitoring Using Machine Learning and Statistical Models. Remote Sens. 2020, 12, 3511. [Google Scholar] [CrossRef]
- Rojas Viloria, D.; Solano Charris, E.L.; Muñoz Villamizar, A.; Montoya Torres, J.R. Unmanned aerial vehicles/drones in vehicle routing problems: A literature review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bareth, G. Introducing a Low-Cost Mini-Uav for-and Multispectral-Imaging. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39B1, 345–349. [Google Scholar] [CrossRef] [Green Version]
- Landau, K.; Van Leeuwen, W. Fine Scale Spatial Urban Land Cover Factors Associated with Adult Mosquito Abundance and Risk in Tucson, Arizona. J. Vector Ecol. J. Soc. Vector Ecol. 2012, 37, 407–418. [Google Scholar] [CrossRef]
- Ivosevic, B.; Han, Y.G.; Kwon, O. Calculating coniferous tree coverage using unmanned aerial vehicle photogrammetry. J. Ecol. Environ. 2017, 41, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Robb, C.; Hardy, A.; Doonan, J.H.; Brook, J. Semi-Automated Field Plot Segmentation From UAS Imagery for Experimental Agriculture. Front. Plant Sci. 2020, 11, 591886. [Google Scholar] [CrossRef]
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2. [Google Scholar] [CrossRef] [Green Version]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Fornace, K.M.; Drakeley, C.J.; William, T.; Espino, F.; Cox, J. Mapping infectious disease landscapes: Unmanned aerial vehicles and epidemiology. Trends Parasitol. 2014, 30, 514–519. [Google Scholar] [CrossRef]
- Hardy, A.; Makame, M.; Cross, D.; Majambere, S.; Msellem, M. Using low-cost drones to map malaria vector habitats. Parasites Vectors 2017, 10, 1. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valdez-Delgado, K.M.; Moo-Llanes, D.A.; Danis-Lozano, R.; Cisneros-Vázquez, L.A.; Flores-Suarez, A.E.; Ponce-García, G.; Medina-De la Garza, C.E.; Díaz-González, E.E.; Fernández-Salas, I. Field effectiveness of drones to identify potential Aedes aegypti breeding sites in household environments from Tapachula, a dengue-endemic city in southern Mexico. Insects 2021, 12, 663. [Google Scholar] [CrossRef] [PubMed]
- Haas-Stapleton, E.; Barretto, M.; Castillo, E.; Clausnitzer, R.; Ferdan, R. Assessing Mosquito Breeding Sites and Abundance Using An Unmanned Aircraft. J. Am. Mosq. Control. Assoc. 2019, 35, 228–232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johnson, B.J.; Manby, R.; Devine, G.J. Performance of aerial Bacillus thuringiensis var. israelensis applications in mixed saltmarsh-mangrove systems and use of affordable unmanned aerial systems to identify problematic levels of canopy cover. bioRxiv 2020. [Google Scholar] [CrossRef]
- Lorenz, C.; Castro, M.C.; Trindade, P.M.P.; Nogueira, M.L.; de Oliveira Lage, M.; Quintanilha, J.A.; Parra, M.C.; Dibo, M.R.; Fávaro, E.A.; Guirado, M.M.; et al. Predicting Aedes aegypti infestation using landscape and thermal features. Sci. Rep. 2020, 10, 21688. [Google Scholar] [CrossRef]
- Markwardt, R.; Sorosjinda-Nunthawarasilp, P. Innovations in the Entomological Surveillance of Vector-Borne Diseases; Cambridge Scholars Publisher: Cambridge, UK, 2021. [Google Scholar]
- Wilke, A.B.B.; Vasquez, C.; Carvajal, A.; Moreno, M.; Fuller, D.O.; Cardenas, G.; Petrie, W.D.; Beier, J.C. Urbanization favors the proliferation of Aedes aegypti and Culex quinquefasciatus in urban areas of Miami-Dade County, Florida. Sci. Rep. 2021, 11, 22989. [Google Scholar] [CrossRef]
- de Jesús Crespo, R.; Rogers, R.E. Habitat Segregation Patterns of Container Breeding Mosquitos: The Role of Urban Heat Islands, Vegetation Cover, and Income Disparity in Cemeteries of New Orleans. Int. J. Environ. Res. Public Health 2022, 19, 245. [Google Scholar] [CrossRef]
- Tsuda, Y.; Suwonkerd, W.; Chawprom, S.; Prajakwong, S.; Takagi, M. Different spatial distribution of Aedes aegypti and Aedes albopictus along an urban-rural gradient and the relating environmental factors examined in three villages in northern Thailand. J. Am. Mosq. Control. Assoc. 2006, 22, 222–228. [Google Scholar] [CrossRef]
- Vásquez-Trujillo, A.; Cardona, D.; Segura Cardona, A.; Camara, D.; Alves-Honório, N.; Parra-Henao, G. House-Level Risk Factors for Aedes aegypti Infestation in the Urban Center of Castilla la Nueva, Meta State, Colombia. J. Trop. Med. 2021, 2021, 12. [Google Scholar] [CrossRef]
- Liu, M.; Wang, X.; Zhou, A.; Fu, X.; Ma, Y.; Piao, C. UAV-YOLO: Small Object Detection on Unmanned Aerial Vehicle Perspective. Sensors 2020, 20, 2238. [Google Scholar] [CrossRef]
- DJI. Matrice 600®. Available online: https://www.dji.com/mx/downloads/products/matrice600 (accessed on 19 October 2019).
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. Unmanned aerial vehicle routing problems: A literature review. Appl. Sci. 2020, 10, 4504. [Google Scholar] [CrossRef]
- Diario Oficial de la Federación. NORMA Oficial Mexicana NOM-032-SSA2-2014, Para la Vigilancia Epidemiológica, Promoción, Prevención y Control de las Enfermedades Transmitidas por Vectores. 2015. Available online: https://www.dof.gob.mx/nota_detalle.php?codigo=5389045&fecha=16/04/2015 (accessed on 18 April 2019).
- Hardy, A.; Proctor, M.; MacCallum, C.; Shawe, J.; Abdalla, S.; Ali, R.; Abdalla, S.; Oakes, G.; Rosu, L.; Worrall, E. Conditional trust: Community perceptions of drone use in malaria control in Zanzibar. Technol. Soc. 2022, 68, 101895. [Google Scholar] [CrossRef] [PubMed]
- Carrillo-Larco, R.; Moscoso-Porras, M.; Taype-Rondan, A.; Ruiz-Alejos, A.; Bernabe-Ortiz, A. The use of unmanned aerial vehicles for health purposes: A systematic review of experimental studies. Glob. Health Epidemiol. Genom. 2018, 3, e13. [Google Scholar] [CrossRef] [PubMed]
- Laksham, K.B. Unmanned aerial vehicle (drones) in public health: A SWOT analysis. J. Fam. Med. Prim. Care 2019, 8, 342–346. [Google Scholar] [CrossRef] [PubMed]
- Williams, G.M.; Wang, Y.; Suman, D.S.; Unlu, I.; Gaugler, R. The development of autonomous unmanned aircraft systems for mosquito control. PLoS ONE 2020, 15, e0235548. [Google Scholar] [CrossRef]
- Faraji, A.; Haas-Stapleton, E.; Sorensen, B.; Scholl, M.; Goodman, G.; Buettner, J.; Schon, S.; Lefkow, N.; Lewis, C.; Fritz, B.; et al. Toys or Tools? Utilization of Unmanned Aerial Systems in Mosquito and Vector Control Programs. J. Econ. Entomol. 2021, 114, 1896–1909. [Google Scholar] [CrossRef]
- Bouyer, J.; Culbert, N.J.; Dicko, A.H.; Pacheco, M.G.; Virginio, J.; Pedrosa, M.C.; Garziera, L.; Pinto, A.T.M.; Klaptocz, A.; Germann, J.; et al. Field performance of sterile male mosquitoes released from an uncrewed aerial vehicle. Sci. Robot. 2020, 5, eaba6251. [Google Scholar] [CrossRef]
- Marina, C.; Liedo, P.; Bond, G.; Osorio, A.; Valle Mora, J.; Angulo, R.; Gomez-Simuta, Y.; Fernandez Salas, I.; Dor, A.; Williams, T. Comparison of Ground Release and Drone-Mediated Aerial Release of Aedes aegypti Sterile Males in Southern Mexico: Efficacy and Challenges. Insects 2022, 13, 347. [Google Scholar] [CrossRef]
- Carrasco-Escobar, G.; Manrique, E.; Ruiz-Cabrejos, J.; Saavedra, M.; Alava, F.; Bickersmith, S.; Prussing, C.; Vinetz, J.M.; Conn, J.E.; Moreno, M.; et al. High-accuracy detection of malaria vector larval habitats using drone-based multispectral imagery. PLoS Neglected Trop. Dis. 2019, 13, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Aragão, F.V.; Cavicchioli Zola, F.; Nogueira Marinho, L.H.; de Genaro Chiroli, D.M.; Braghini Junior, A.; Colmenero, J.C. Choice of unmanned aerial vehicles for identification of mosquito breeding sites. Geospatial Health 2020, 15, 92–100. [Google Scholar] [CrossRef]
- Sallam, M.F.; Fizer, C.; Pilant, A.N.; Whung, P.Y. Systematic Review: Land Cover, Meteorological, and Socioeconomic Determinants of Aedes Mosquito Habitat for Risk Mapping. Int. J. Environ. Res. Public Health 2017, 14, 1230. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Estallo, E.; Sangermano, F.; Grech, M.; Ludueña-Almeida, F.; Frías-Cespedes, M.; Ainete, M.; Almirón, W.; Livdahl, T. Modelling the distribution of the vector Aedes aegypti in a central Argentine city: Modelling Aedes aegypti distribution. Med. Vet. Entomol. 2018, 32, 451–461. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Obenauer, J.; Joyner, T.A.; Harris, J.B. The importance of human population characteristics in modeling Aedes aegypti distributions and assessing risk of mosquito-borne infectious diseases. Trop. Med. Health 2017, 45, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cianci, D.; Hartemink, N.; Ibáñez-Justicia, A. Modelling the potential spatial distribution of mosquito species using three different techniques. Int. J. Health Geogr. 2015, 14, 10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, S.; Whiteman, A.; Li, A.; Rapp, T.; Delmelle, E.; Chen, G.; Brown, C.L.; Robinson, P.; Coffman, M.J.; Janies, D.; et al. An operational machine learning approach to predict mosquito abundance based on socioeconomic and landscape patterns. Landsc. Ecol. 2019, 34, 1295–1311. [Google Scholar] [CrossRef]
- Rahman, M.S.; Pientong, C.; Zafar, S.; Ekalaksananan, T.; Paul, R.E.; Haque, U.; Rocklöv, J.; Overgaard, H.J. Mapping the spatial distribution of the dengue vector Aedes aegypti and predicting its abundance in northeastern Thailand using machine-learning approach. One Health 2021, 13, 100358. [Google Scholar] [CrossRef]
- INEGI. Censo de Población y Vivienda 2010. Website. 2010. Available online: https://www.inegi.org.mx/programas/ccpv/2010/ (accessed on 18 October 2022).
- Tun-Lin, W.; Kay, B.H.; Barnes, A. The Premise Condition Index: A Tool for Streamlining Surveys of Aedes aegypti. Am. J. Trop. Med. Hyg. 1995, 53, 591–594. [Google Scholar] [CrossRef]
- Moloney, J.; Skelly, C.; Weinstein, P.; Maguire, M.; Ritchie, S.R. Domestic Aedes aegypti breeding site surveillance: Limitations of remote sensing as a predictive surveillance tool. Am. J. Trop. Med. Hyg. 1998, 59, 261–264. [Google Scholar] [CrossRef] [Green Version]
- Silver, J. Mosquito Ecology: Field Sampling Methods; SpringerLink: Springer e-Books; Springer: Dordrecht, The Netherlands, 2008. [Google Scholar]
- Darsie, R.; Ward, R.; Chang, C.; Litwak, T. Identification and Geographical Distribution of the Mosquitoes of North America, North of Mexico; University Press of Florida: Gainesville, FL, USA, 2016. [Google Scholar]
- Arredondo-Jimenez, J.I.; Valdez-Delgado, K.M. Aedes aegypti pupal/demographic surveys in southern Mexico: Consistency and practicality. Ann. Trop. Med. Parasitol. 2006, 100, 17–32. [Google Scholar] [CrossRef]
- DJI. Zenmuse X5®. Available online: https://www.dji.com/mx/zenmuse-x5/info#specs (accessed on 10 October 2019).
- Mica Sense Inc. Red Edge®. 2019. Available online: https://support.micasense.com/hc/en-us/articles/115003537673-RedEdge-M-User-Manual-PDF- (accessed on 10 October 2019).
- CENAPRED. Centro Nacional de Prevención de Desastres. Website. 2022. Available online: https://www.gob.mx/cenapred/ (accessed on 18 October 2022).
- Diario Oficial de la Federación. NORMA Oficial Mexicana NOM-107-SCT3-2019, Que Establece los Requerimientos para Operar un Sistema de Aeronave Pilotada a Distancia (RPAS) en el Espacio aéreo Mexicano. 2019. Available online: http://www.dof.gob.mx/normasOficiales/8006/sct11_C/sct11_C.html (accessed on 15 April 2022).
- Pix4D. Capture®. 2019. Available online: https://www.pix4d.com/es/producto/pix4dcapture (accessed on 15 October 2019).
- Suduwella, C.; Amarasinghe, A.; Niroshan, L.; Elvitigala, C.; De Zoysa, K.; Keppetiyagama, C. Identifying Mosquito Breeding Sites via Drone Images. In Proceedings of the 3rd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications (DroNet ’17), Niagara Falls, NY, USA, 23 June 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 27–30. [Google Scholar] [CrossRef]
- Case, E.; Shragai, T.; Harrington, L.; Ren, Y.; Morreale, S.; Erickson, D. Evaluation of unmanned aerial vehicles and neural networks for integrated mosquito management of Aedes albopictus (Diptera: Culicidae). J. Med. Entomol. 2020, 57, 1588–1595. [Google Scholar] [CrossRef]
- Pix4D. Mapper®. 2019. Available online: https://www.pix4d.com/es/centro-de-descarga (accessed on 2 December 2019).
- L3HARRIS GEOSPATIAL. Getting Started with ENVI. Website. 2022. Available online: https://www.l3harrisgeospatial.com/docs/GettingStartedWithENVI.html (accessed on 20 October 2022).
- Díaz, J. Estudios de índices de Vegetación a Partir de Imágenes Aéreas Tomadas Desde RPAS y Aplicaciones de estos a la Agricultura de Precisión. Master’s Thesis, Universidad Complutense de Madrid, Madrid, Spain, 2015. [Google Scholar]
- ArcGIS. Raster Calculator. Website. 2022. Available online: https://desktop.arcgis.com/en/arcmap/latest/tools/spatial-analyst-toolbox/raster-calculator.htm (accessed on 20 October 2022).
- Jolliffe, I. Principal Component Analysis; Springer: Berlin, Germany, 1986. [Google Scholar]
- Greenacre, M.; Blasius, J. Multiple Correspondence Analysis and Related Methods; Chapman & Hall/CRC Statistics in the Social and Behavioral Sciences; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Izenman, A.J. Modern Multivariate Statistical Techniques: Regression, Classification, and Manifold Learning; Springer: Berlin, Germany, 2008. [Google Scholar]
- Garg, A.; Tai, K. Comparison of regression analysis, artificial neural network and genetic programming in handling the multicollinearity problem. In Proceedings of the 2012 Proceedings of International Conference on Modelling, Identification and Control, Wuhan, China, 24–26 June 2012; pp. 353–358. [Google Scholar]
- Borg, I.; Groenen, P. Modern Multidimensional Scaling: Theory and Applications; Springer: Berlin, Germany, 2005. [Google Scholar]
- Gower, J.C. A General Coefficient of Similarity and Some of Its Properties. Biometrics 1971, 27, 857–871. [Google Scholar] [CrossRef]
- Lopez-Arevalo, I.; Aldana-Bobadilla, E.; Molina-Villegas, A.; Galeana-Zapién, H.; Muñiz-Sanchez, V.; Gausin-Valle, S. A Memory-Efficient Encoding Method for Processing Mixed-Type Data on Machine Learning. Entropy 2020, 22, 1391. [Google Scholar] [CrossRef] [PubMed]
- Pagès, J. Multiple Factor Analysis by Example Using R; Chapman & Hall/CRC The R Series; Taylor & Francis: Boca Raton, FL, USA, 2014. [Google Scholar]
- Pagès, J. Analyse factorielle de données mixtes. Rev. Stat. AppliquÉe 2004, 52, 93–111. [Google Scholar]
- Davidow, M.B.; Matteson, D. Factor Analysis of Mixed Data for Anomaly Detection. arXiv 2020, arXiv:abs/2005.12129. [Google Scholar] [CrossRef]
- Murtagh, F. A Survey of Algorithms for Contiguity-constrained Clustering and Related Problems. Comput. J. 1985, 28, 82–88. [Google Scholar] [CrossRef] [Green Version]
- Wagstaff, K.; Cardie, C.; Rogers, S.; Schrödl, S. Constrained K-Means Clustering with Background Knowledge. In Proceedings of the Eighteenth International Conference on Machine Learning ( ICML ’01), San Francisco, CA, USA, 28 June–1 July 2001; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2001; pp. 577–584. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Helland, I.S. Partial Least Squares Regression and Statistical Models. Scand. J. Stat. 1990, 17, 97–114. [Google Scholar]
- Rosipal, R.; Krämer, N. Overview and Recent Advances in Partial Least Squares. In Subspace, Latent Structure and Feature Selection; Saunders, C., Grobelnik, M., Gunn, S., Shawe-Taylor, J., Eds.; Springer: Berlin, Germany, 2006; pp. 34–51. [Google Scholar]
- Wegelin, J.A. A Survey of Partial Least Squares (PLS) Methods, with Emphasis on the Two-Block Case; Technical Report; Department of Statistics, University of Washington: Seattle, WA, USA, 2000. [Google Scholar]
- Wold, H. Path Models with Latent Variables: The NIPALS Approach. In Quantitative Sociology; Blalock, H., Aganbegian, A., Borodkin, F., Boudon, R., Capecchi, V., Eds.; International Perspectives on Mathematical and Statistical Modeling; Academic Press: Cambridge, MA, USA, 1975; pp. 307–357. [Google Scholar]
- Bureau, P.A.S. Dengue and dengue hemorrhagic fever in the Americas: Guidelines for Prevention and Control; Pan American Health Organization, Pan American Sanitary Bureau, Regional: Washington, DC, USA, 1994. [Google Scholar]
- Garjito, T.A.; Hidajat, M.C.; Kinansi, R.R.; Setyaningsih, R.; Anggraeni, Y.M.; Mujiyanto; Trapsilowati, W.; Jastal; Ristiyanto; Satoto, T.B.T.; et al. Stegomyia Indices and Risk of Dengue Transmission: A Lack of Correlation. Front. Public Health 2020, 8, 328. [Google Scholar] [CrossRef]
- Focks, D.A.; Chadee, D.D. Pupal Survey: An Epidemiologically Significant Surveillance Method for Aedes aegypti: An Example Using Data from Trinidad. Am. J. Trop. Med. Hyg. 1997, 56, 159–167. [Google Scholar] [CrossRef]
- Tun-Lin, W.; Kay, B.H.; Barnes, A.; Forsyth, S. Critical Examination of Aedes aegypti Indices: Correlations with Abundance. Am. J. Trop. Med. Hyg. 1996, 54, 543–547. [Google Scholar] [CrossRef]
- Näslund, J.; Ahlm, C.; Islam, K.; Evander, M.; Bucht, G.; Lwande, O.W. Emerging Mosquito-Borne viruses linked to Aedes aegypti and Aedes albopictus: Global status and preventive strategies. Vector-Borne Zoonotic Dis. 2021, 21, 731–746. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.A.; Jarvis, C.I.; Edmunds, W.J.; Economou, T.; Lowe, R. Spatial connectivity in mosquito-borne disease models: A systematic review of methods and assumptions. J. R. Soc. Interface 2021, 18, 20210096. [Google Scholar] [CrossRef] [PubMed]
- Aswi, A.; Cramb, S.; Moraga, P.; Mengersen, K. Bayesian spatial and spatio-temporal approaches to modelling dengue fever: A systematic review. Epidemiol. Infect. 2019, 147, 1–14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ochoa de la Torre, J. La Vegetación Como Instrumento Para el Control Microclimático. Ph.D. Thesis, Departament de Construccions Arquitectòniques I, UPC, Barcelona, Spain, 1999. Available online: http://hdl.handle.net/2117/93436 (accessed on 10 October 2019).
- Powell, J.R.; Tabachnick, W.J. History of domestication and spread of Aedes aegypti—A review. MemÓRias Inst. Oswaldo Cruz 2013, 108, 11–17. [Google Scholar] [CrossRef]
- Ibañez-Bernal, S.; Dantes, H.G. Los vectores del dengue en México: Una revisión crítica. Salud Pública México 1995, 37, 53–63. [Google Scholar]
- Cheong, W. Preferred Aedes aegypti larval habitats in urban areas. Bull. World Health Organ. 1967, 36, 586. [Google Scholar] [PubMed]
- Ritchie, S.; Gubler, D.; Ooi, E.; Vasudevan, S.; Farrar, J. Dengue vector bionomics: Why Aedes aegypti is such a good vector. In Dengue and Dengue Hemorrhagic Fever; CAB International: Oxfordshire UK, 2014; Chapter 24. [Google Scholar]
- Estrada Zúñiga, A.C.; Ñaupari Vásquez, J. Detección e identificación de comunidades vegetales altoandinas, Bofedal y Tolar de Puna Seca mediante ortofotografías RGB y NDVI en drones “Sistemas Aéreos no Tripulados”. Sci. Agropecu. 2021, 12, 291–301. [Google Scholar] [CrossRef]
- Baak-Baak, C.M.; Cigarroa-Toledo, N.; Pinto-Castillo, J.F.; Cetina-Trejo, R.C.; Torres-Chable, O.; Blitvich, B.J.; Garcia-Rejon, J.E. Cluster Analysis of Dengue Morbidity and Mortality in Mexico from 2007 to 2020: Implications for the Probable Case Definition. Am. J. Trop. Med. Hyg. 2022, 106, 1515–1521. [Google Scholar] [CrossRef]
- Eisen, L.; Lozano-Fuentes, S. Use of mapping and spatial and space-time modeling approaches in operational control of Aedes aegypti and dengue. PLoS Neglected Trop. Dis. 2009, 3, e411. [Google Scholar] [CrossRef] [Green Version]
- Dzul-Manzanilla, F.; Correa-Morales, F.; Che-Mendoza, A.; Palacio-Vargas, J.; Sánchez-Tejeda, G.; González-Roldan, J.F.; López-Gatell, H.; Flores-Suárez, A.E.; Gómez-Dantes, H.; Coelho, G.E.; et al. Identifying urban hotspots of dengue, chikungunya, and Zika transmission in Mexico to support risk stratification efforts: A spatial analysis. Lancet Planet. Health 2021, 5, e277–e285. [Google Scholar] [CrossRef]
- LeCun, Y. Generalization and Network Design Strategies. In Connectionism in Perspective; Pfeifer, R., Schreter, Z., Fogelman, F., Steels, L., Eds.; Elsevier: Zurich, Switzerland, 1989. [Google Scholar]
- LeCun, Y.; Bengio, Y. Convolutional networks for images, speech, and time series. Handb. Brain Theory Neural Netw. 1995, 3361, 1995. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:abs/1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.; Liao, H.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:abs/2004.10934. Available online: http://xxx.lanl.gov/abs/2004.10934 (accessed on 18 October 2022).
- Kucharczyk, M.; Hay, G.J.; Ghaffarian, S.; Hugenholtz, C.H. Geographic object-based image analysis: A primer and future directions. Remote Sens. 2020, 12, 2012. [Google Scholar] [CrossRef]
- Stanton, M.C.; Kalonde, P.; Zembere, K.; Hoek Spaans, R.; Jones, C.M. The application of drones for mosquito larval habitat identification in rural environments: A practical approach for malaria control? Malar. J. 2021, 20, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Annan, E.; Guo, J.; Angulo-Molina, A.; Yaacob, W.F.W.; Aghamohammadi, N.; Yavaşoglu, S.; Bardosh, K.; Dom, N.; Zhao, B.; Lopez-Lemus, U.; et al. Community acceptability of dengue fever surveillance using unmanned aerial vehicles: A cross-sectional study in Malaysia, Mexico, and Turkey. Travel Med. Infect. Dis. 2022, 49, 102360. [Google Scholar] [CrossRef]
- Bartumeus, F.; Costa, G.B.; Eritja, R.; Kelly, A.H.; Finda, M.; Lezaun, J.; Okumu, F.; Quinlan, M.M.; Thizy, D.C.; Toé, L.P.; et al. Sustainable innovation in vector control requires strong partnerships with communities. PLoS Neglected Trop. Dis. 2019, 13, 1–5. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Type | Description |
|---|---|---|
| Premise Condition Index (PCI) | Discrete | A house score about the house condition, the yard condition, and the degree of shade assessment of houses surveyed. Score 3 to 9. |
| Premise Condition Index (PCI) weighted | Categorical | Qualification criteria based on the house score of PCI. 1 (Low) = 3, 2 (Medium) = and 3 (High) = . |
| Modified Premise Condition Index (PCI ) | Discrete | A house score about the yard condition and the degree of shade assessment of houses surveyed. Score 3 to 6. |
| Modified Premise Condition Index (PCI ) weighted | Categorical | Category criteria are based on the house score of PCI . 1 (Low) = 2, 2 (Medium) = y 3 (High) = . |
| Shade conditions | Categorical | Category of the degree of shadow per house (PCI or PCI ) , , Based on personnel criteria. |
| Male mosquitoes | Continuous | Number of Ae. aegypti male mosquitoes per house. |
| Female mosquitoes | Continuous | Number of Ae. aegypti female mosquitoes per house. |
| Mosquitoes | Continuous | Number of Ae. aegypti mosquitoes per house. |
| Pupae | Continuous | Number of Ae. aegypti pupae per house. |
| 1st instar larvae | Continuous | Number of Ae. aegypti 1st instar larvae per house. |
| 2nd instar larvae | Continuous | Number of Ae. aegypti 2nd instar larvae per house. |
| 3rd instar larvae | Continuous | Number of Ae. aegypti 3rd instar larvae per house. |
| 4th instar larvae | Continuous | Number of Ae. aegypti 4th instar larvae per house. |
| Larvae | Continuous | Number of Ae. aegypti all instar larvae per house. |
| Breeding sites | Continuous | Number of breeding sites of Ae. aegypti with eggs, larvae, or pupae per house. |
| Overcrowding | Continuous | The number of inhabitants/Number of house rooms per house. |
| ShadeDrone | Categorical | Category of the degree of shadow per house, delimited on aereal images made by drone: , and . |
| TreeCover | Categorical | Category of the tree cover per house, delimited on aereal images made by drone: , and . |
| TreeHeight | Continuous | Tree high average per block, based on the houses surveyed and trees identified on drone cartography per block. |
| NDVIRe | Continuous | Average of 100 random points per house of Normalized Difference Red Edge Index (NDRE). |
| GNDVI | Continuous | Average of 100 random points per house of Green Normalized Difference Vegetation Index (GNDVI). |
| NDVI | Continuous | Average of 100 random points per house of Normalized Difference Vegetation Index (NDVI). |
| Digital Surface Model | Continuous | Digital Surface Model (DSM) per house on masl. |
| CIgreen | Continuous | Average of 100 random points per house of Green Chlorophyll Index (CIgreen). |
| Digital Terrain Model | Continuous | Digital Terrain Model (DTM) per house on masl. |
| Parameter | Description | Values |
|---|---|---|
| The number of principal components (PCA) used to represent the vegetation indices (NDVI, GNDVI, NDVIre and CIgreen), and cartographic information (DSM and DTM) | ||
| The number of clusters considered to model the spatial relationships between the houses. | ||
| The number of k nearest neighboring houses for defining the connectivities in the agglomerative hierarchical clustering with spatial constraints | ||
| The number of principal components to be used, obtained with FAMD | ||
| The maximum number of principal components to obtain in PLS to generate our proposed index. Observe that, altough we use just the first score of PLS (), results may vary for different values of . Also, this parameter must satisfy |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muñiz-Sánchez, V.; Valdez-Delgado, K.M.; Hernandez-Lopez, F.J.; Moo-Llanes, D.A.; González-Farías, G.; Danis-Lozano, R. Use of Unmanned Aerial Vehicles for Building a House Risk Index of Mosquito-Borne Viral Diseases. Machines 2022, 10, 1161. https://doi.org/10.3390/machines10121161
Muñiz-Sánchez V, Valdez-Delgado KM, Hernandez-Lopez FJ, Moo-Llanes DA, González-Farías G, Danis-Lozano R. Use of Unmanned Aerial Vehicles for Building a House Risk Index of Mosquito-Borne Viral Diseases. Machines. 2022; 10(12):1161. https://doi.org/10.3390/machines10121161
Chicago/Turabian StyleMuñiz-Sánchez, Víctor, Kenia Mayela Valdez-Delgado, Francisco J. Hernandez-Lopez, David A. Moo-Llanes, Graciela González-Farías, and Rogelio Danis-Lozano. 2022. "Use of Unmanned Aerial Vehicles for Building a House Risk Index of Mosquito-Borne Viral Diseases" Machines 10, no. 12: 1161. https://doi.org/10.3390/machines10121161