1. Introduction
As a modern agricultural machine, the combine harvester achieves harvesting at a high speed, playing a significant role in the harvest season [
1]. Combine harvesters scheduling, which aims to obtain a reasonable scheduling scheme with the least cost while satisfying various constraints, has attracted research interest across the world. For wheat farms with high yield, harvesters with low capacity may not be suitable. Nik et al. adopted multi-criteria decision-making to optimizing the feed rate in order to match harvesters with farms [
2]. In order to improve the harvesting efficiency, Zhang et al. proposed a path-planning optimization scheme based on tabu search and proportion integral differential (PID) control, which effectively shortens the harvesting path [
3]. In order to obtain a corner position from the global positioning system, a conventional AB point method is generally adopted, but this is fairly time-consuming. In the light of this, Rahman et al. presented an optimum harvesting area of a convex and concave polygon for the path planning of a robot combine harvester, which reduces crop losses [
4]. Due to changes in the location of fruit in the picking process, locating fruits and path planning, which have to be performed on-line, are computationally expensive operations, and hence Willigenburg et al. presented a new method for near-minimum-time collision-free path planning for a fruit-picking robot [
5]. Saito et al. developed a robot combine harvester for beans, and this robot can unload harvested grain to an adjacent transport truck during the harvesting operation, improving the harvesting capacity by approximately 10% [
6]. The minimization of harvesting distance and the maximization of sugarcane yield, which are conflicting, are treated as optimization objectives. To solve the problem, Sethanan et al. devised a multi-objective particle swarm optimization method, which provides planners with sufficient options for trade-off solutions [
7]. Zhang et al. investigated the emergency scheduling and allocation problem of agricultural machinery and propose two corresponding algorithms, based on the shortest distance and max-ability algorithms, respectively [
8]. Cao et al. divided the multi-machine cooperative operation problem into two parts: task allocation and task sequence planning. They established the problem model considering both path cost and task execution ability, solving it using an ant colony algorithm [
9]. Lu et al. proposed a working environment modeling and coverage path planning method for combine harvesters that precisely marks the boundaries of the farmland to be harvested and effectively realizes the coverage path planning of combine harvesters [
10]. Hameed considered that a large proportion of farms have rolling terrains, which has a considerable influence on the design of coverage paths [
11].
Furthermore, terrain inclinations are also taken into account by energy consumption models, in order to provide the optimal driving direction for agricultural robots and autonomous machines. Cui et al. mainly investigated the path planning of autonomous agricultural machineries in complex rural roads, employing a particle swarm optimization algorithm to search for the optimal path [
12]. In addition, to solve the problem of the slip and roll of autonomous machinery caused by complex roads, a machinery dynamic model considering road curvature and topographic inclination was established to track the planned path. A route planning approach for robots was developed in [
13], which was used in orchard operations possessing the inherent structured operational environment that arises from time-independent spatial tree configurations. In conclusion, the studies mentioned above mainly focused on single-type agricultural machinery and seldom involved multi-type agricultural machinery. Combine harvesters scheduling problems, in particular, have not been well studied. However, in view of the household contract responsibility in China, it is essential that multi-type combine harvesters are used for harvesting. The optimization task for combine harvesters is a mixed-integer optimization problem, similar to job-shop scheduling problems [
14,
15,
16], and calls for strong computational tools.
For decades, swarm intelligence heuristic techniques such as particle swarm optimization (PSO) [
7,
12,
17], grey wolf optimization (GWO) [
18], ant colony optimization (ACO) [
19,
20], genetic algorithms (GA) [
21], artificial bee colony (ABC) [
22,
23,
24], cuckoo search (CS) [
25] and meta-heuristic approaches [
26], have been a focus of attention. However, conventional intelligence algorithms may suffer from premature convergence, which significantly affects their solving performance. It is essential to develop an efficient algorithm to address the multi-type combine harvesters scheduling problem. The whale optimization algorithm (WOA) is a meta-heuristic algorithm inspired by whales, proposed by Seyedali et al. in 2016 [
27], which mimics the foraging behavior of humpback whales to successfully solve some real-world optimization problems [
28,
29,
30,
31,
32,
33,
34]. However, WOA is a swarm-based search algorithm and is easily trapped into local optimal solutions. Considering these shortcomings, some improvement to the WOA is made as follows. Firstly, an adaptive convergence factor is introduced into the WOA, which gives the algorithm strong global exploration ability with a larger step in the early stages of the search and enables it to carry out deep exploitation with a shorter step in the later evolution stages. Secondly, when the algorithm runs into prematurity, a mutation strategy is adopted for individuals where the fitness values have not been improved over a series of 10 iterations, to help them escape from local minima. These improvements help to enhance the convergence speed and the solution quality. The improvements are described in more detail in
Section 4.
The major contributions of the paper are listed below:
- (1)
A novel multi-type combine harvesters scheduling problem is formulated, generation a complex mixed-integer NP hard optimization problem.
- (2)
A new modified whale optimization algorithm, namely MWOA, is proposed. The new variant includes an opposition-based learning search operator, adaptive convergence factor and heuristic mutation. The new method is evaluated based on benchmark functions and comprehensive computational studies.
- (3)
The proposed intelligent approach is used to solve the multi-type combine harvesters scheduling problem.
The remainder of this paper is organized as follows. The multi-type harvesters scheduling problem is introduced in
Section 2.
Section 3 expounds the standard whale optimization algorithm (WOA). In
Section 4, the design of the proposed MWOA is discussed in detail. The overall performance of the proposed method is studied, and then it is applied to solve the multi-type harvesters scheduling problem in
Section 5. Finally, the conclusions are presented, and further research opportunities are suggested.
2. Multi-Type Combine Harvesters Scheduling Problem
2.1. Problem Description
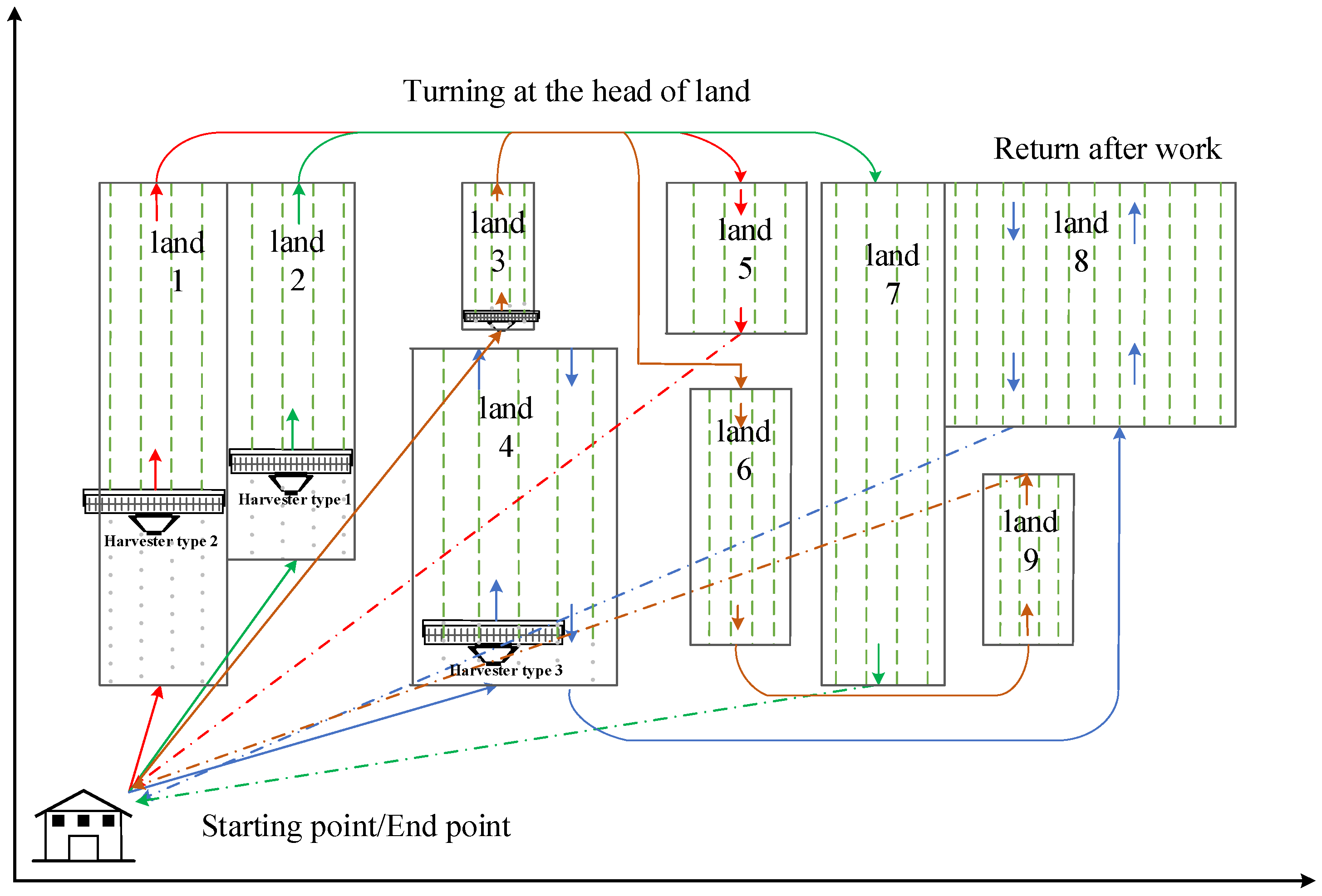
Due to the household contract responsibility system in China and taking into account of the different personnel structure of each family, the amounts of rural land are allocated to each family according to the proportion of family members. The amounts of rural land belonging to each household are therefore different. When the grain in fields is mature and ready for harvesting, multi-type harvesters are in great demand, and it is necessary to make full use of the harvesters. Efficient use also saves fuel and reduces the emission of greenhouse gases. Therefore, it is valuable to investigate how to properly schedule the multi-type combine harvesters to quickly and fully finish the harvesting task. The principle of multi-type combine harvesters scheduling is shown in
Figure 1.
2.2. Model Assumptions
The following assumptions are made in this study:
- (I)
A single scheduling center is assumed;
- (II)
The harvester drives at a constant speed;
- (III)
The harvesting demands are known in advance;
- (IV)
Harvester faults during harvesting are ignored;
- (V)
The time spent on refueling the harvesters is negligible;
- (VI)
The time for unloading the harvesters is ignored.
2.3. Notation
The notations used in this paper are summarized as follows.
: The set of agricultural cooperatives.
: The set of combine harvesters.
: The header width of the combine harvester , .
: The time at which combine harvester g completes harvesting in field , , .
: The set of routes which each harvester travels.
: The set of the fields ready for harvesting.
: A binary decision variable which indicates whether field is included in route or not, , .
: A binary decision variable which denotes whether combine harvester covers route or not, , .
: A binary decision variable which indicates whether a combine harvester operates continuous harvesting from field to field in route , , .
: The distance between the harvester and the field, or between the field and the next field, .
, : The length and width of field , respectively, .
, : The driving speed and the harvesting velocity, respectively, of harvester , .
Definition 1. If the combine harvester is responsible for fieldin route , then ; otherwise, .
Definition 2. If the combine harvester operates continuous harvesting from fieldto the field in route, then ; otherwise, .
2.4. Problem Modeling
The aim of this paper is to minimize the time spent on harvesting. The mathematical model, including the objective function and constraint conditions, is defined as follows.
where objective (1) is to minimize the total time for completing harvesting. Constraint (2) ensures that each filed is visited only once by one combine harvester. Constraint (3) guarantees that a circuit does not exist between field
i and field
j. Constraint (4) ensures that combine harvester g can enter field
i. Constraint (5) indicates that all harvesters complete the harvesting task simultaneously. Constraint (6) means that the combine harvesters continue harvesting. Constraints (7) and (8) require that the start and end points of each route are both agricultural cooperatives. Constraints (9) and (10) are binary decision variables, which only take values of 0 or 1.
6. Conclusions
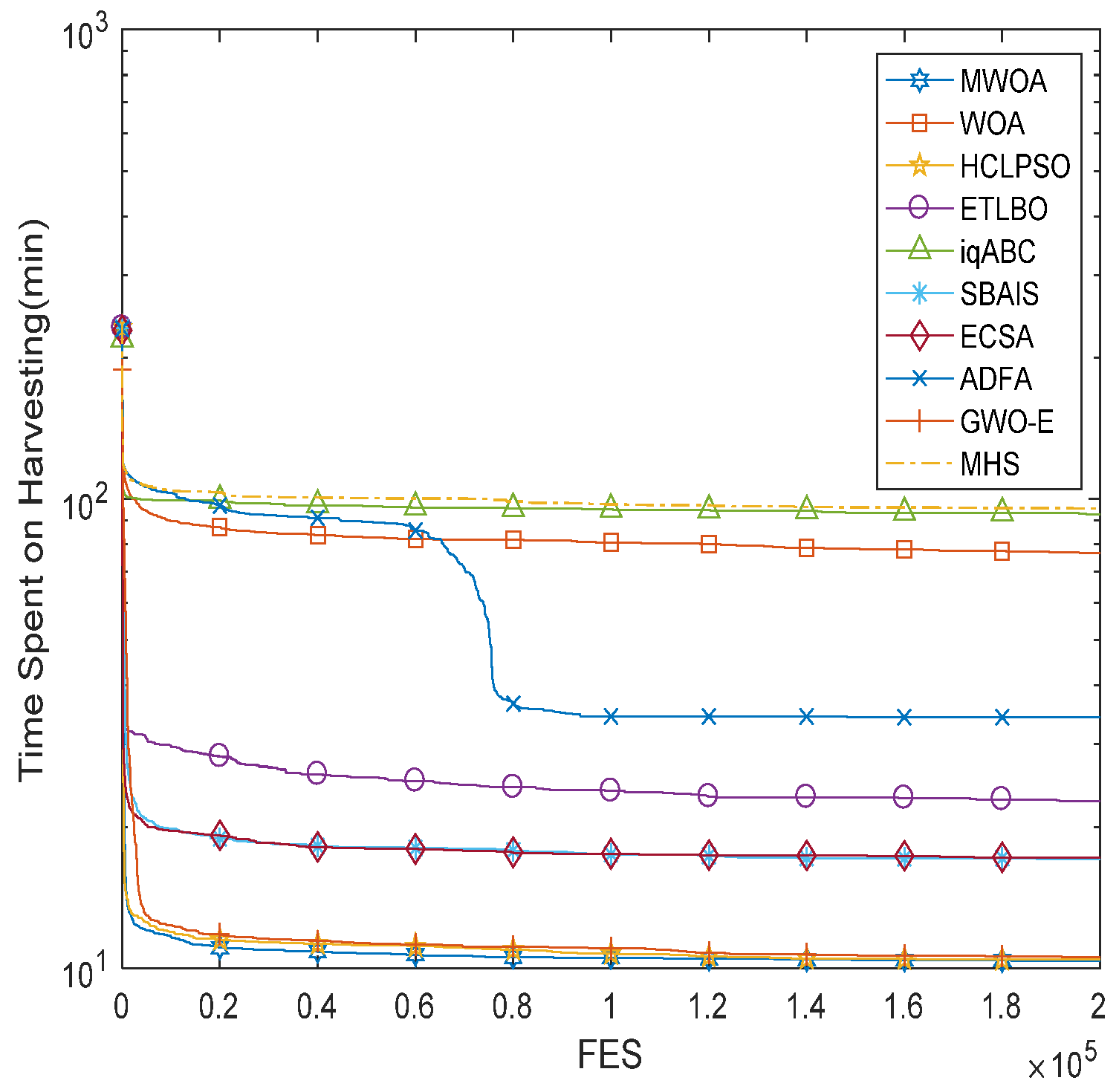
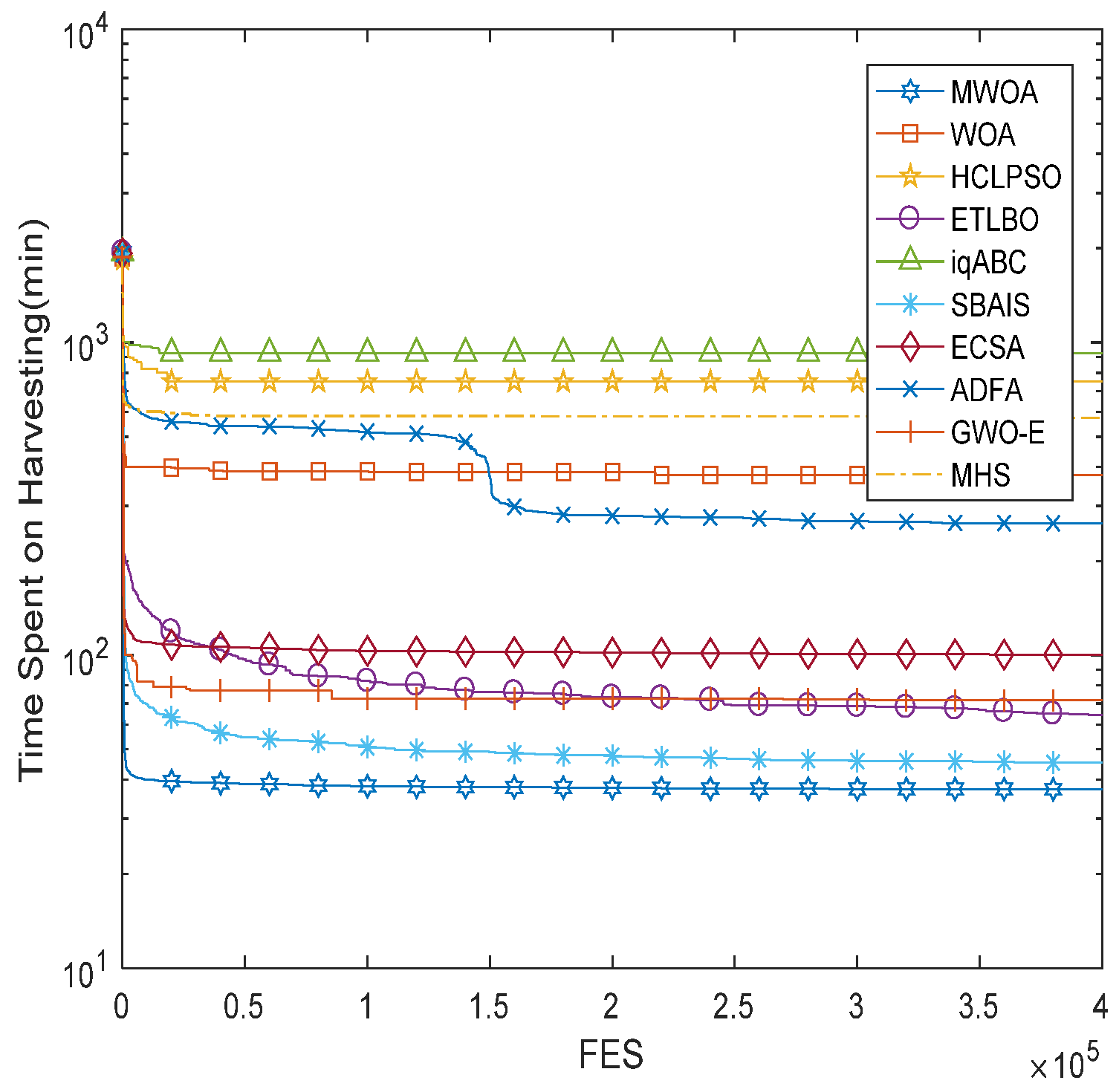
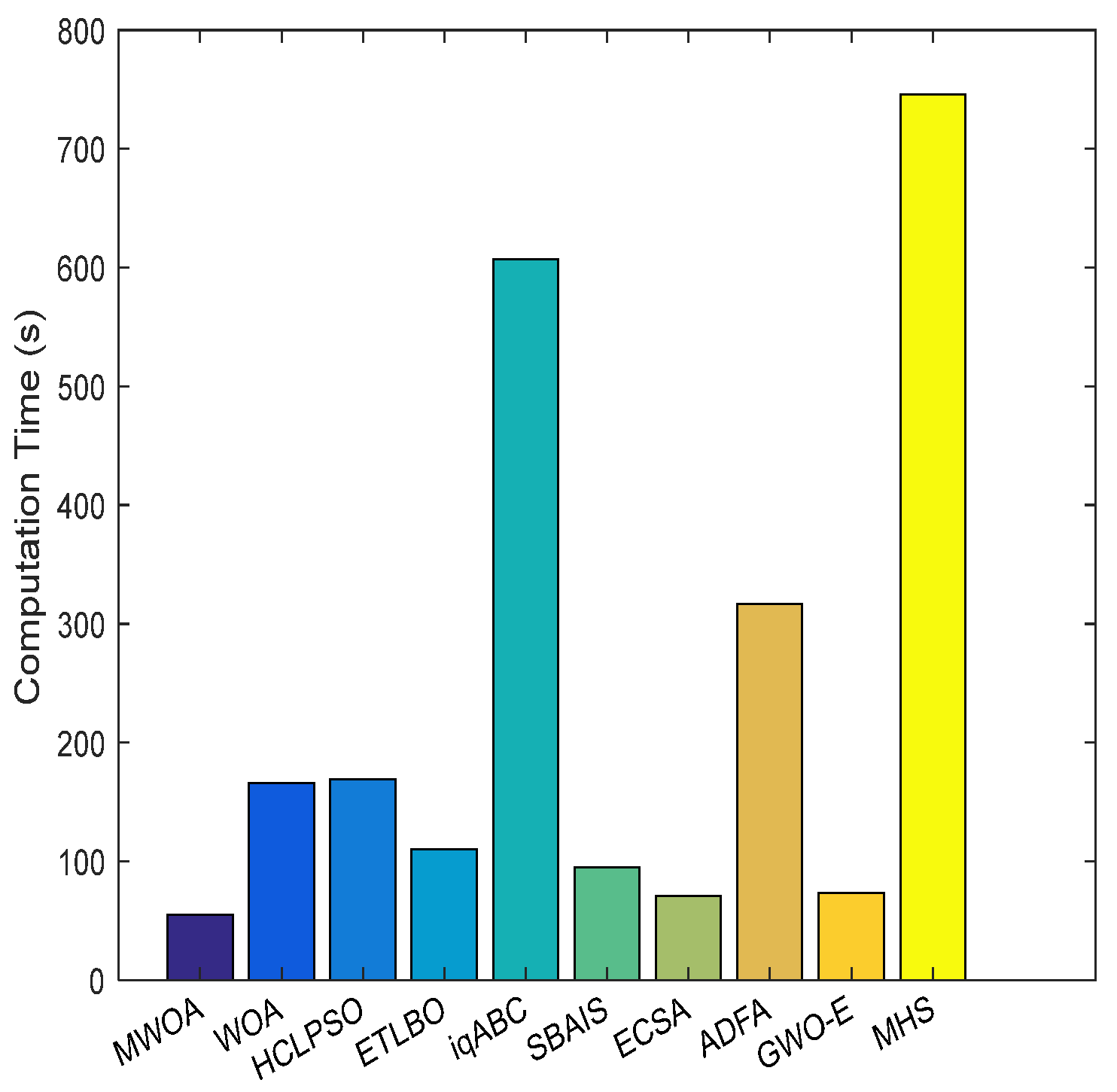
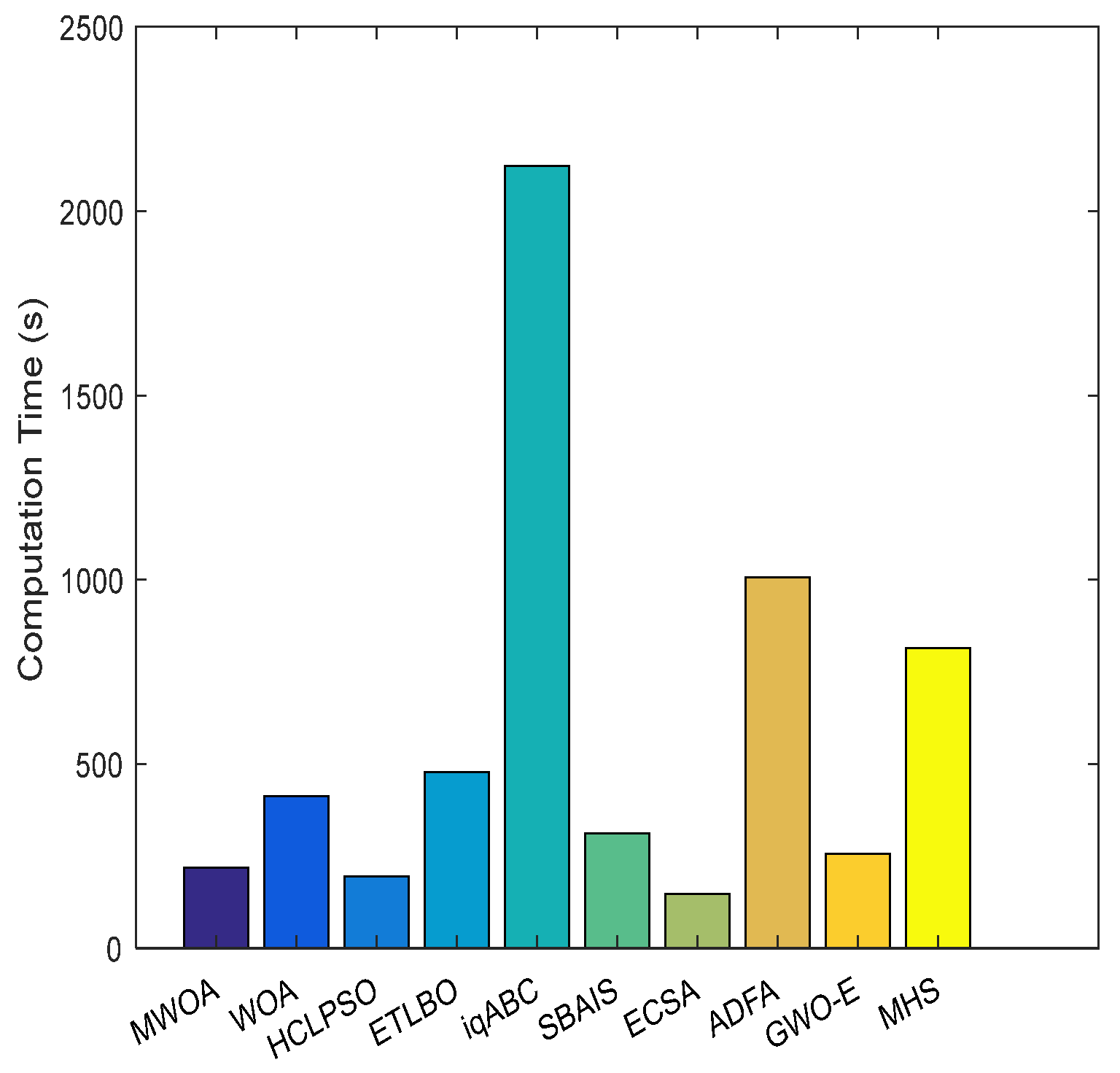
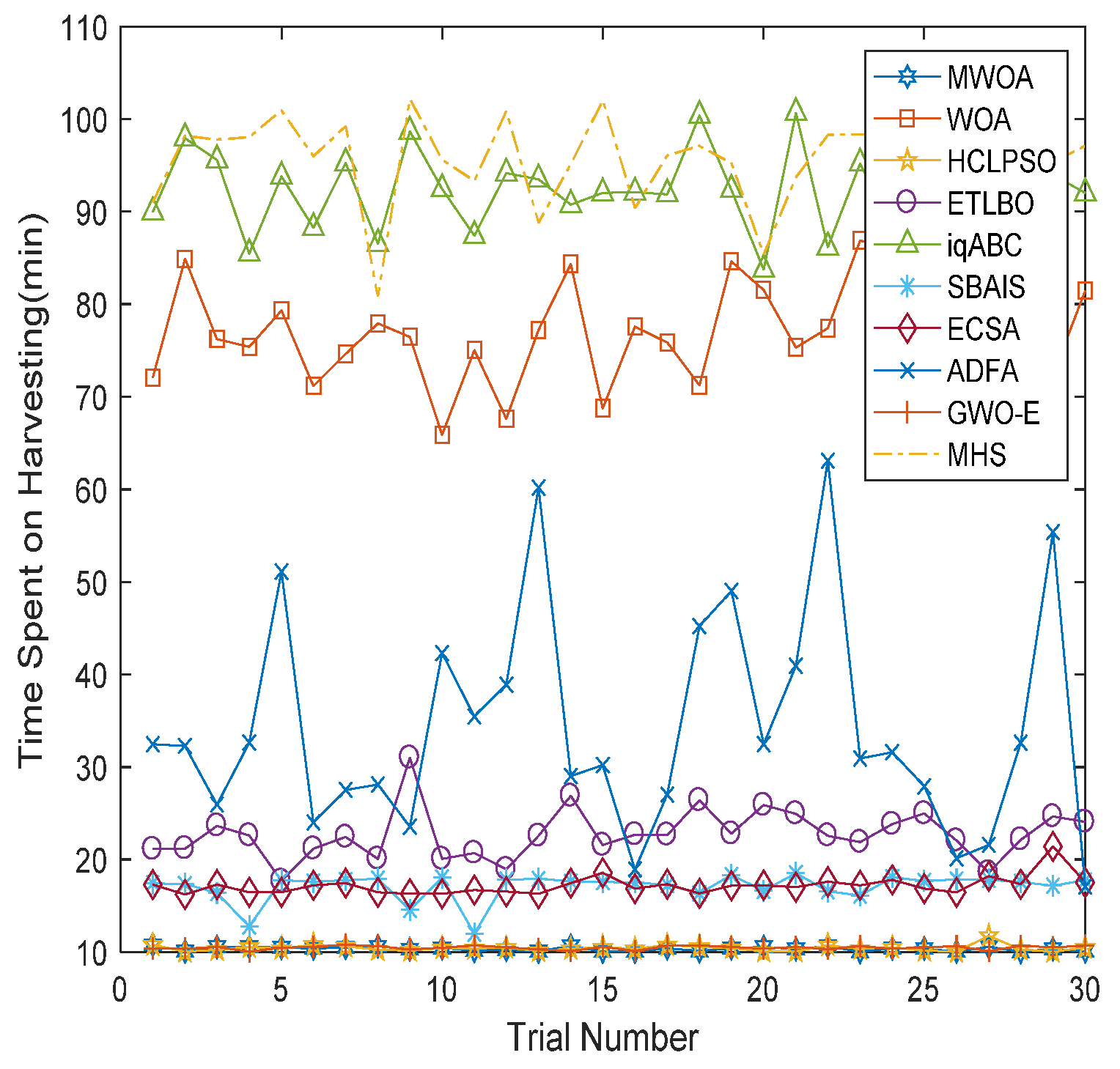
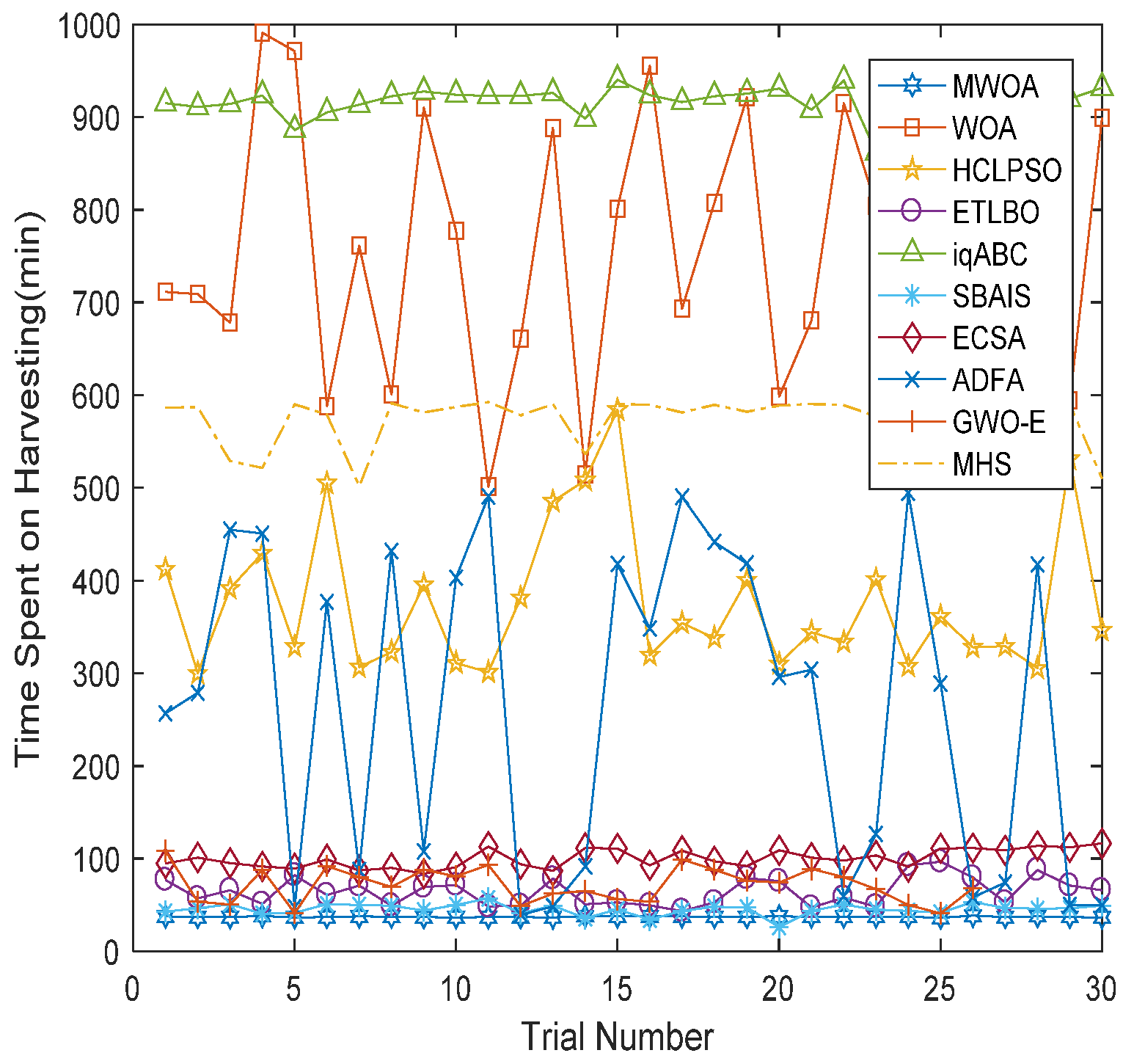
This paper established a model for multi-type harvesters scheduling, and the problem was solved by a proposed meta-heuristic method called the MWOA. The MWOA was realized by making some improvements to the conventional WOA. An opposition-based learning search operator and an adaptive convergence factor were added to the WOA to improve the global convergence and the balance against local convergence. In addition, by using heuristic mutation, the parents whose offspring were trapped in local optima could provide helpful information leading to a promising search, and thus the variety in the population and the ability of the MWOA algorithm to escape from a local optimum were effectively improved. Finally, the numerical simulation results showed that MWOA had better performance in terms of solution quality and convergence speed compared with other swarm-based algorithms for solving the multi-type harvesters scheduling problem.
With the fast development of agricultural collectives, intelligent scheduling of agricultural machinery plays a very important role in maximizing user revenue. Furthermore, the country’s increasing emphasis on environmental protection, energy saving and emission reduction targets, promotes the ability of electric agricultural machinery to gradually enter the market. Cooperation scheduling between diesel agricultural machinery and electric agricultural machinery may lead to future work. Furthermore, to highlight the flexibility and increase realism, complicated harvesters scheduling problems considering refueling, recharging and breakdown should also be investigated.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}