


Accurate Approximations for a Nonlinear SIR System via an Efficient Analytical Approach: Comparative Analysis
Abstract
:1. Introduction
2. Reduced Model
3. Analytical Approximations
3.1. First-Order Approximate Solution (FOAS)
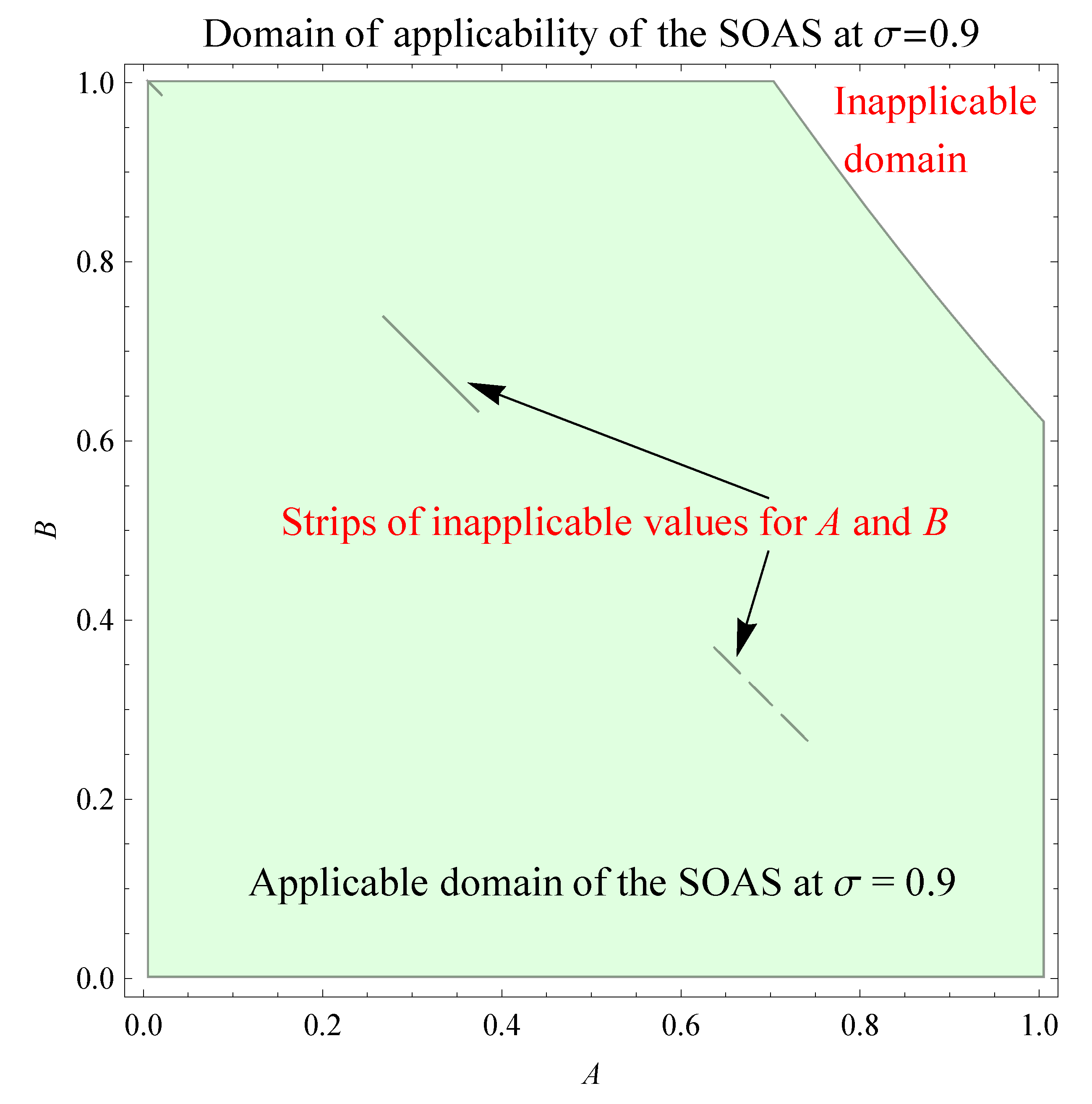
3.2. Second-Order Approximate Solution (SOAS)
4. Features and Behaviors
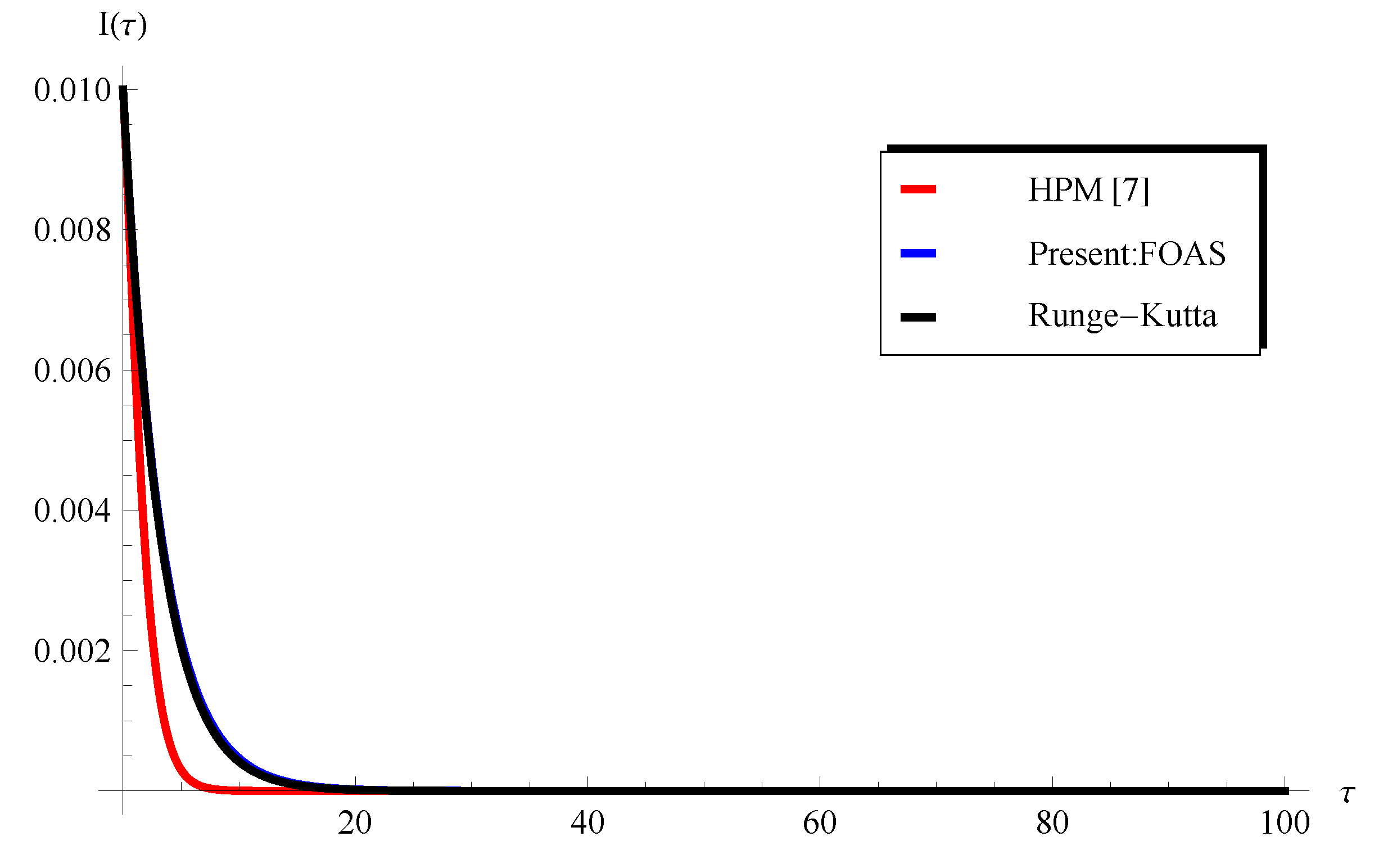
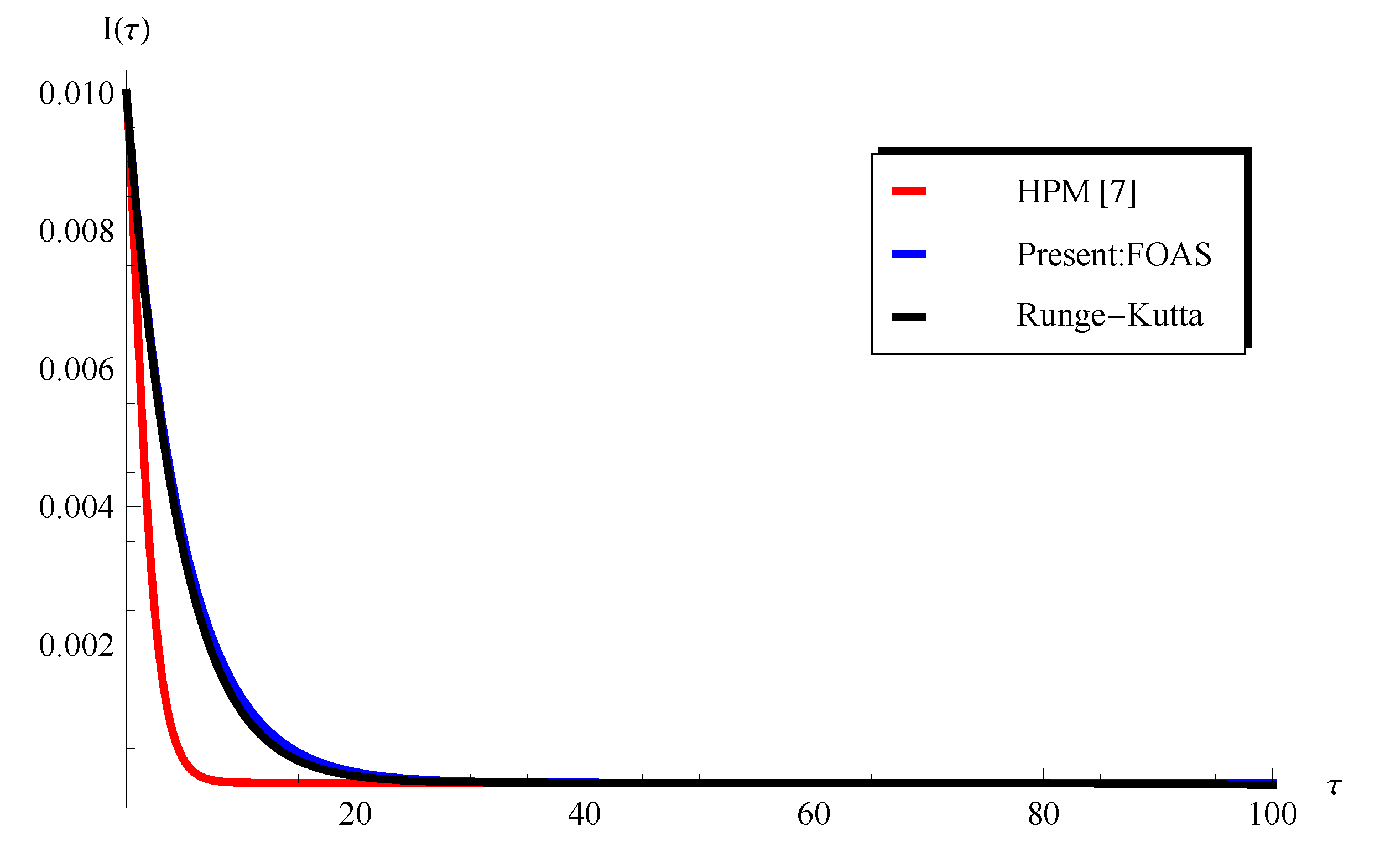
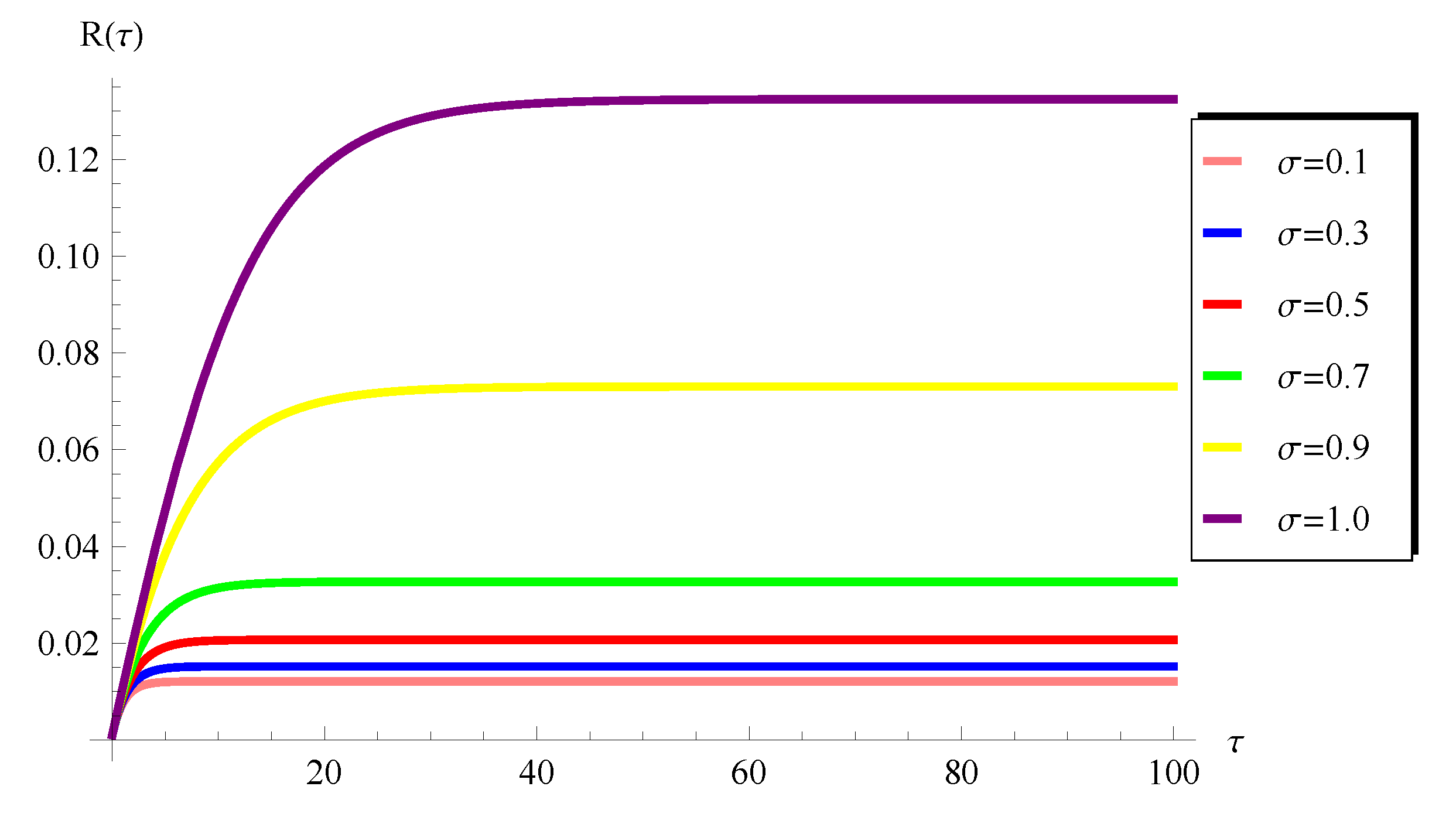
5. Numerical Results and Comparisons with Other Methods
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Graunt, J. Natural and Political Observations Made Upon the Bills of Mortality; Tho. Roycroft for John Martin, James Allestry, and Tho. Dicas: London, UK, 1662. [Google Scholar]
- Bernoulli, D. Essai d’une nouvelle analyse de la mortalite causee par la petite verole et des avantages de l’inoculation pour la prevenir. Mem. Math. Phys. Acad. Roy. Sci. Paris 1760, 1. [Google Scholar]
- Kermack, W.O.; McKendrick, A.G. Contribution to the mathematical theory of epidemics. Proc. Roy. Soc. Lond. A 1927, 115, 700–721. [Google Scholar]
- Murray, J.D. Mathematical Biology: I. An Introduction; Springer: New York, NY, USA; Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Brauer, F.; van den Driessche, P.; Wu, J. (Eds.) Lecture Notes in Mathematical Epidemiology; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- De Abajo, J.G. Simple mathematics on COVID-19 expansion. MedRxiv 2020. [Google Scholar]
- Gepreel, K.A.; Mohamed, M.S.; Alotaibi, H.; Mahdy, A.M.S. Dynamical Behaviors of Nonlinear Coronavirus (COVID-19) Model with Numerical Studies. Comput. Mater. Contin. 2021, 67, 675–686. [Google Scholar] [CrossRef]
- Comunian, A.; Gaburro, R.; Giudici, M. Inversion of a SIR-based model: A critical analysis about the application to COVID-19 epidemic. Phys. D Nonlinear Phenom. 2020, 413, 132674. [Google Scholar] [CrossRef] [PubMed]
- Kudryashov, N.A.; Chmykhov, M.A.; Vigdorowitsch, M. Analytical features of the SIR model and their applications to COVID-19. Appl. Math. Model. 2021, 90, 466–473. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.C.; Salahshour, S.; Ahmadian, A.; Senu, N. Modeling the dynamics of COVID-19 using fractal-fractional operator with a case study. Results Phys. 2022, 33, 105103. [Google Scholar] [CrossRef] [PubMed]
- Sarkar, K.; Khajanchi, S.; Nieto, J.J. Modeling and forecasting the COVID-19 pandemic in India. Chaos Solitons Fractals 2020, 139, 110049. [Google Scholar] [CrossRef] [PubMed]
- Martelloni, G.; Martelloni, G. Modelling the downhill of the SARS-CoV-2 in Italy and a universal forecast of the epidemic in the world. Chaos Solitons Fractals 2020, 139, 110064. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.J.; Shen, S.F. An improved SIR model describing the epidemic dynamics of the COVID-19 in China. Results Phys. 2021, 25, 104289. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, K.; Ghosh, A.K. Study of COVID-19 epidemiological evolution in India with a multi-wave SIR model. Nonlinear Dyn. 2022, 109, 47–55. [Google Scholar] [CrossRef] [PubMed]
- Ala’raj, M.; Majdalawieh, M.; Nizamuddin, N. Modeling and forecasting of COVID-19 using a hybrid dynamic model based on SEIRD with ARIMA corrections. Infect. Dis. Model. 2021, 6, 98–111. [Google Scholar] [CrossRef] [PubMed]
- Margenov, S.; Popivanov, N.; Ugrinova, I.; Hristov, T. Mathematical Modeling and Short-Term Forecasting of the COVID-19 Epidemic in Bulgaria: SEIRS Model with Vaccination. Mathematics 2022, 10, 2570. [Google Scholar] [CrossRef]
- Ebaid, A. A reliable aftertreatment for improving the differential transformation method and its application to nonlinear oscillators with fractional nonlinearities. Commun. Nonlin. Sci. Numer. Simul. 2011, 16, 528–536. [Google Scholar] [CrossRef]
- Liao, S. Beyond Perturbation: Introduction to the Homotopy Analysis Method; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Chauhan, A.; Arora, R. Application of homotopy analysis method (HAM) to the non-linear KdV equations Astha Chauhan and Rajan Arora. Commun. Math. 2023, 31, 205–220. [Google Scholar] [CrossRef]
- Ayati, Z.; Biazar, J. On the convergence of Homotopy perturbation method. J. Egypt. Math. Soc. 2015, 23, 424–428. [Google Scholar] [CrossRef]
- Bayat, M.; Pakar, I.; Bayat, M. Approximate analytical solution of nonlinear systems using homotopy perturbation method. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2016, 230, 10–17. [Google Scholar] [CrossRef]
- Adomian, G. Solving Frontier Problems of Physics: The Decomposition Method; Kluwer Academy: Boston, MA, USA, 1994. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (FOAS) | (SOAS) | (Numerical) | |
|---|---|---|---|
| 0.1 | 0.0120977 | 0.0120969 | 0.0120969 |
| 0.2 | 0.0134663 | 0.0134619 | 0.0134619 |
| 0.3 | 0.0152205 | 0.0152059 | 0.0152059 |
| 0.4 | 0.0175497 | 0.0175096 | 0.0175097 |
| 0.5 | 0.0207921 | 0.0206876 | 0.0206879 |
| 0.6 | 0.0256158 | 0.0253348 | 0.0253362 |
| 0.7 | 0.0335505 | 0.0327069 | 0.0327130 |
| 0.8 | 0.0490385 | 0.0458424 | 0.0458764 |
| 0.9 | 0.0926606 | 0.0730530 | 0.0733310 |
| 1.0 | 1.0000000 | 0.1324565 | 0.1352252 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aljoufi, M. Accurate Approximations for a Nonlinear SIR System via an Efficient Analytical Approach: Comparative Analysis. Axioms 2024, 13, 167. https://doi.org/10.3390/axioms13030167
Aljoufi M. Accurate Approximations for a Nonlinear SIR System via an Efficient Analytical Approach: Comparative Analysis. Axioms. 2024; 13(3):167. https://doi.org/10.3390/axioms13030167
Chicago/Turabian StyleAljoufi, Mona. 2024. "Accurate Approximations for a Nonlinear SIR System via an Efficient Analytical Approach: Comparative Analysis" Axioms 13, no. 3: 167. https://doi.org/10.3390/axioms13030167