1. Introduction
It is crucial for a reasonable logistics system design to reduce the total cost of the supply chain and improve supply efficiency. In order to achieve the above two objectives, it is usually necessary to determine two levels of decision-making: the immediate determination of facility location problems (FLP) and the vehicle routing problem (VRP) [
1]. Historically, researchers usually treated these as two types of decisions separately.
The FLP stands as a quintessential quandary within the realm of operations research. This locational puzzle has an extensive array of applications spanning production, daily life, and logistics such as establishments of factories, warehouses, first aid centers, and logistics hubs. Hu et al. [
2] employed a multi-objective mixed integer model in their investigation to ascertain the optimal siting of hazardous goods recycling stations, accounting for traffic constraints on urban roads. The efficacy of their approach was substantiated through solving a real-world case study on hazardous material logistics in Shandong, China. In the work of Oksuz et al. [
3], a two-stage stochastic model was harnessed to tackle the location challenge posed by temporary medical centers. By factoring in patient types, requirements, potential road and hospital damage, along with the distances between disaster areas and hospitals, the model methodically sought optimal solutions for temporary hospital placements. This model was then practically employed in selecting a suitable site for a temporary hospital during an Istanbul disaster. Additionally, Karagöz et al. [
4]. leveraged the ARAS extended interval type-2 fuzzy model to resolve the location quandary for vehicle recycling centers, juxtaposing it against the conventional interval type-2 fuzzy approach to underscore the potency of the ARAS method. Nonetheless, in practical scenarios, a challenge will emerge after the identification of suitable facility sites: the optimization of vehicle routes to effectively serve customers within the designated coverage area. This challenge aligns with long-term decision-making imperatives.
The second vital factor in a logistics system design is the VRP. According to references [
5,
6,
7], different VRPs have different mathematical models, and mixed integer linear programming is often used to solve problems. According to the client’s ordering demand with a certain capacity-limited set of vehicles, the appropriate travel routes from the logistics center to the clients are organized so that the vehicles pass through all the clients in an orderly manner to reach a certain goal under the satisfaction of certain constraints (e.g., demand, service time limitation, vehicle capacity limitation, mileage limitation, etc.). Qin et al. [
8] used the original heuristic algorithms based on reinforcement learning for the vehicle path problem with a multi-vehicle fleet of different capacities and tested on a large dataset, achieving an average GAP of 6.4% compared to the classical algorithms of PSO, GA, and SA; Altabeeb et al. [
9] proposed a cooperative hybrid firefly algorithm for solving the vehicle routing problem with capacity constraints and tested it on 108 benchmark cases, achieving an average GAP of 3.4% compared to HAHA and 4.9% compared to LNS-ACO. Rabbouch et al. [
10] solved the enriched vehicle routing problem with time window and pause time constraints using an efficient implementation of a genetic algorithm, which was able to complete the enriched vehicle path problem 1–17 min faster than the GA’s CPU response time depending on the size of the algorithm.
The FLP and the VRP were usually addressed separately, although they are mutually influenced and restrained. This disjointed approach would fail to achieve an overarching optimal solution due to the lack of integration between these two critical aspects. The significance of their integration was underscored by Maranzana et al. [
11] and Webb et al. [
12], prompting a shift towards combining these problems. Consequently, the fusion of FLP and VRP has gained prominence, leading to the emergence of the Location-Routing Problem (LRP) propelled by advancements in optimization technology. LRP is an NP hard problem [
13]. In [
14], Muñoz-Villamizar et al. designed an integer linear programming model for urban logistics, which solved the problem of logistics center positioning and distribution in cities and achieved a distance cost lower limit of 20.77%. In [
15], Heidari et al. proposed a mixed integer linear programming to solve the transportation problem of hazardous materials. In a small case with 2 nodes and 3 retailers, the solution only took 0.19 s. In [
16], Shaerpour et al. designed a multi-layer multi-objective mixed integer linear programming model to solve the management and transportation of medical waste, and demonstrated the effectiveness of the proposed model in a practical case in Tehran. This confluence has ushered in a surge of research into LRP. Cao et al. [
17] introduced a two-stage mixed integer model for the procurement of farm crops and the ensuing two-stage LRP involving processing facilities. Similarly, Biuki et al. [
18] tackled the two-level LRP inherent to perishable goods supply chains. Their hybrid heuristic algorithm, integrating genetic and particle swarm optimization algorithms, outperformed traditional meta-heuristic methods across a comprehensive benchmark assessment. The burgeoning interest in LRP is evident in the work of Ferreira et al. [
19], which highlights the increasing attention directed towards this problem.
In practical applications, the LRP often focuses on the Capacitated Location-Routing Problem (CLRP), which is tightly bound by stringent vehicle capacity constraints. Specifically, the determination of warehouse locations and vehicle routes exhibits a mutual interdependence. The chosen warehouse locations exert a profound influence on subsequent vehicle route planning, while the resultant vehicle route plans inherently reflect the efficacy of the warehouse location selection. A previous study [
13] employed nested methodologies for an iterative resolution of location and routing predicaments. This involved the locator sequentially identifying sets of warehouses, followed by the routing program’s endeavor to optimize routes based on the designated warehouses. However, the above approach faces limitations in that vehicle paths corresponding to distinct warehouse assemblies tend to operate independently, impeding the effective utilization of valuable historical vehicle routing insights.
To seek better and more effective methods for the CLRP, meta-heuristic algorithms were applied in recent years. This idea found practicality in the study by Ferreira et al. [
19], where a hybrid meta-heuristic algorithm was employed to resolve the CLRP, yielding superior outcomes compared to conventional solutions. Furthermore, Akpunar et al. [
20] addressed the CLRP using a broad domain search algorithm, albeit without incorporating combinatorial assembly optimization for multi-vehicle fleets at the VRP stage. It is found that there are two key points to using meta-heuristic algorithms to solve CLRP. Firstly, since the solution of CLRP is a combinatorial problem, finding an appropriate expression of the solution in the decision space becomes the key to the problem. The second is that since CLRP involves location selection and combinatorial path optimization, its solution space has continuous and discrete characteristics, so selecting appropriate meta-heuristic algorithms is also a key element.
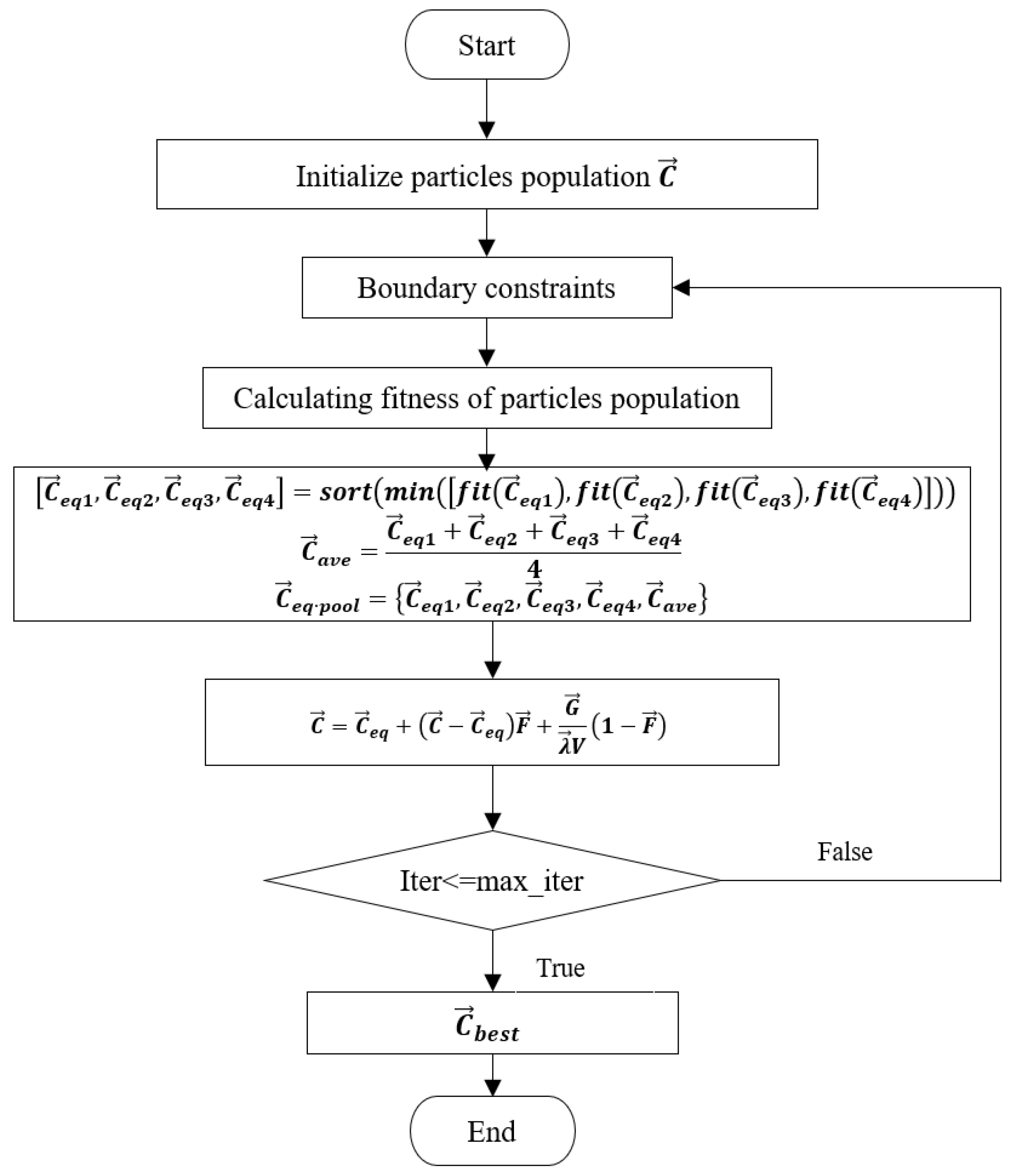
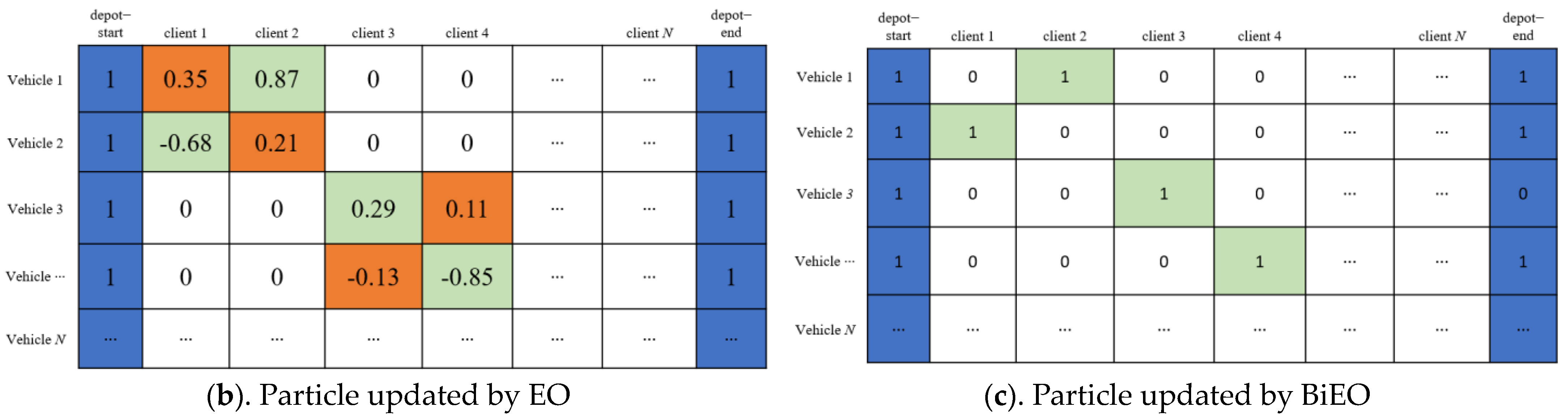
To optimize the assembly combination of multi-vehicle during vehicle path optimization by considering constraints of the CLRP, this paper proposed the BiEO algorithm with a multi-vehicle decision set for the assembly combination of multi-vehicle routing.
Table 1 shows the comparison of this paper’s problem and algorithm with other articles.
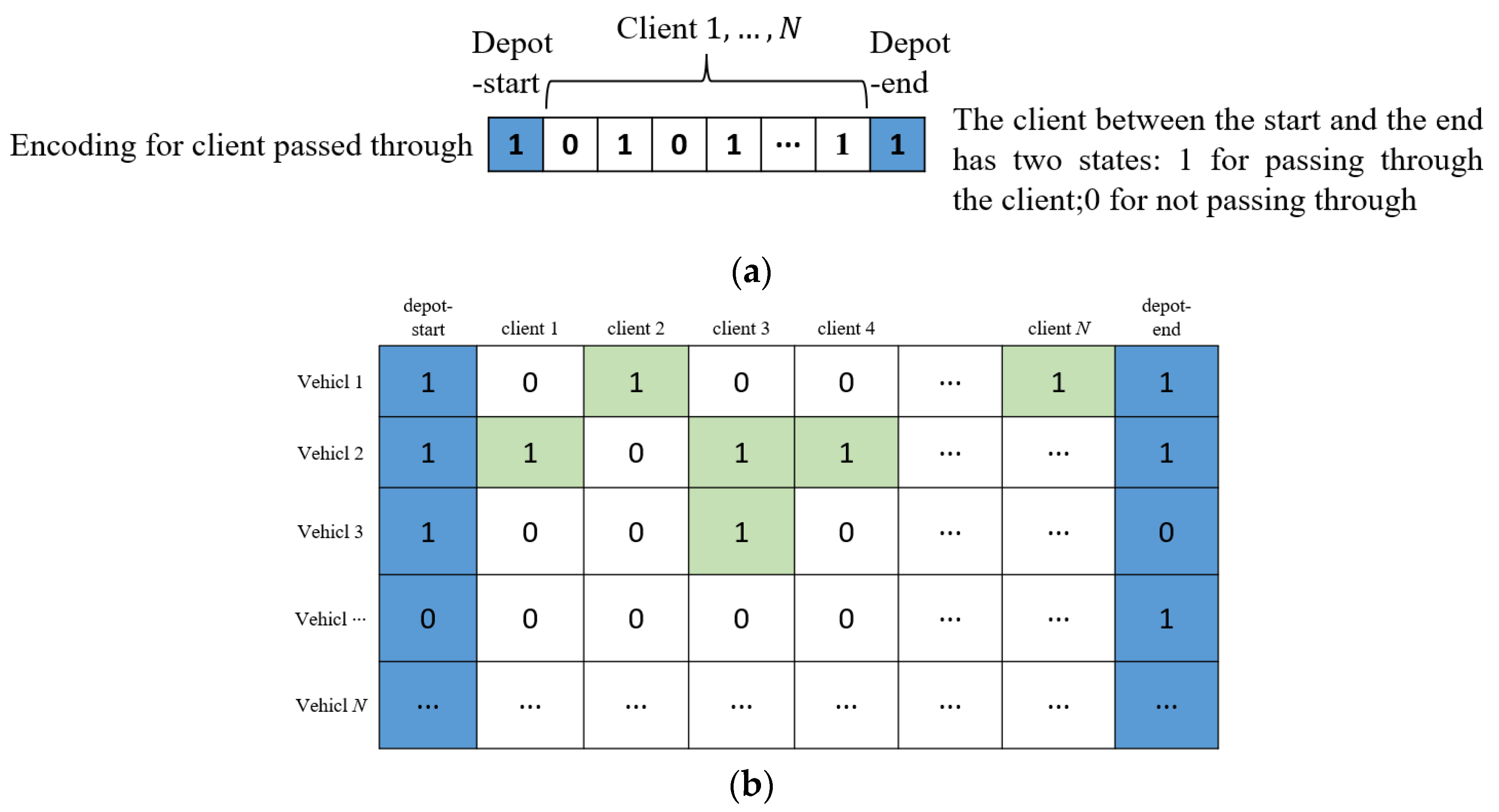
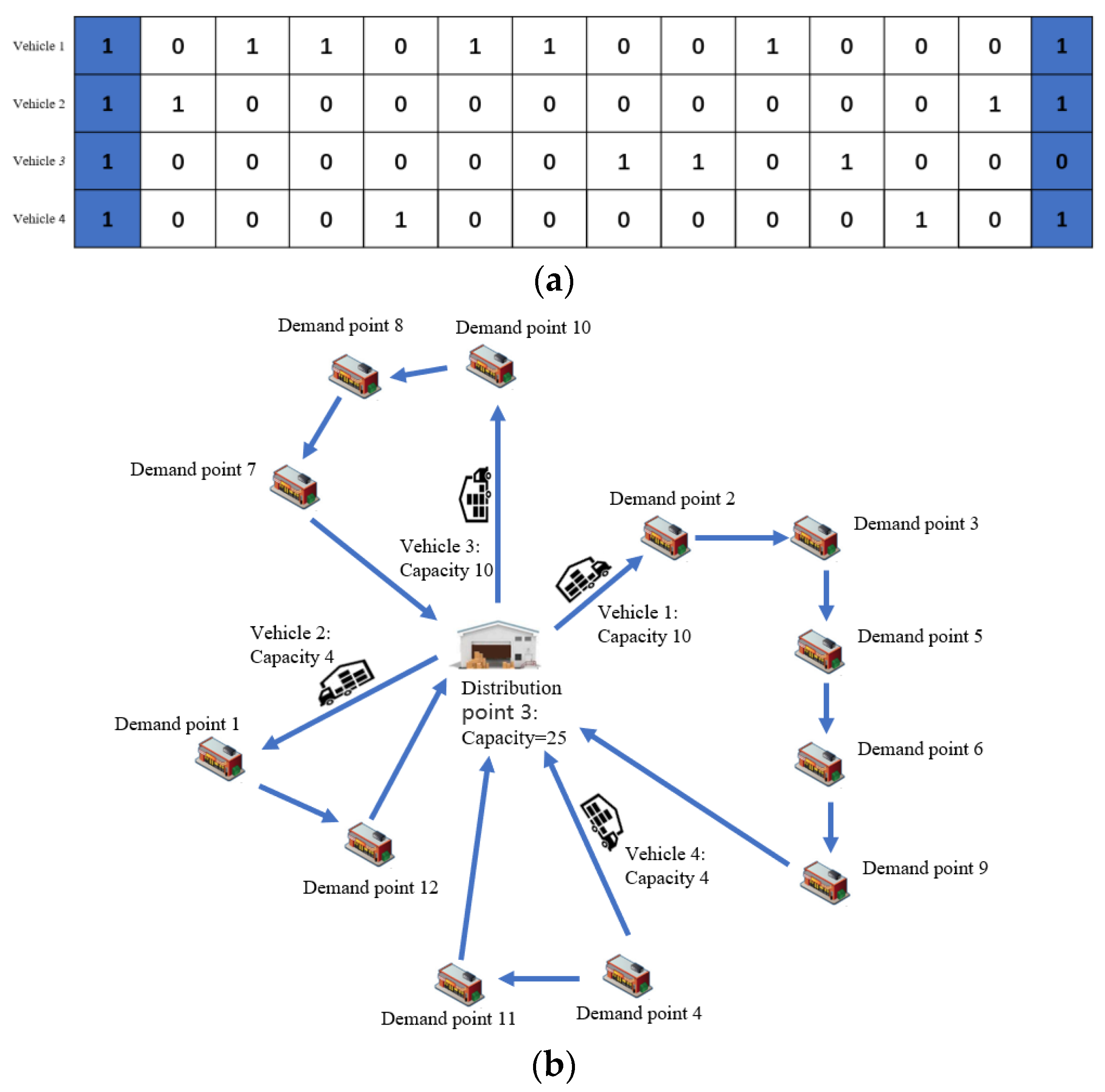
This paper needs to optimize the location of warehouses for material storage in residential areas with a population of about 300,000 (assuming a fixed daily material demand of 400 g per resident) and optimize the transportation routes for subsequent truck transportation of materials. This is an LRP problem, and it is worth noting that in the transportation route optimization problem in this article since each distribution area uses four trucks to transport goods, it is necessary to optimize the assembly of goods on the trucks before planning the transportation route. The model and method proposed in this paper are used to solve the problem of simultaneously assembling and transporting routes on trucks. The final solution solved in this paper is the assembly plan and transportation route for each truck in each distribution area.
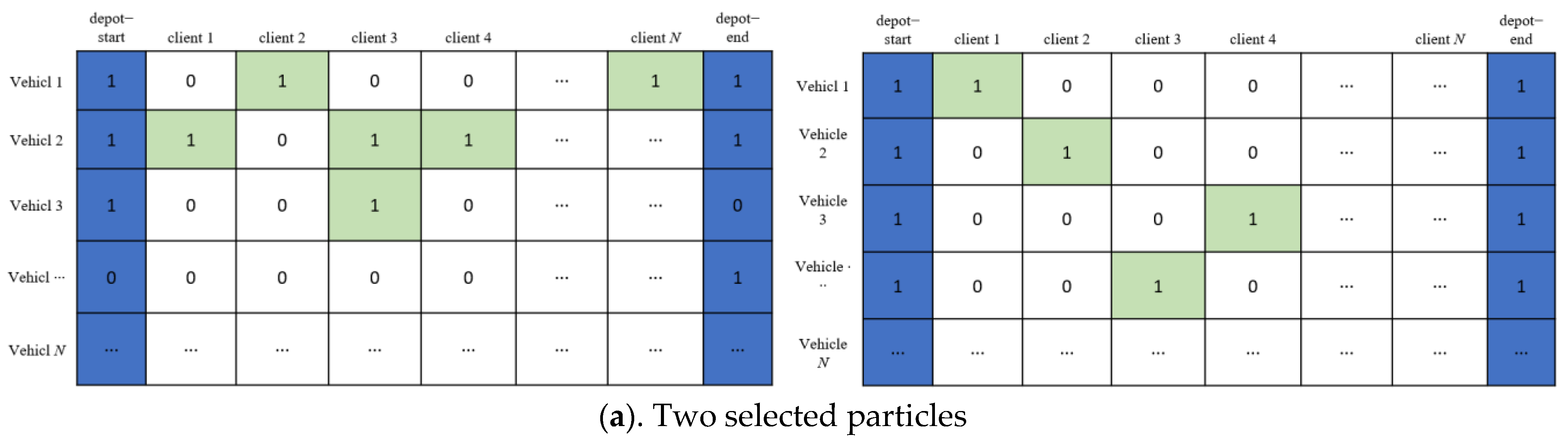
The contribution of this paper is that firstly, it proposes a BiEO algorithm that can effectively solve the route optimization problem in this paper. Secondly, this paper proposes a DACA strategy to solve the assembly combination and route optimization problems of multiple vehicles in this paper. The two methods proposed in this paper have achieved better results in solving real LRP compared to other algorithms in the experiment.
The initial section provides an introduction to FLP, VRP, and LRP, especially CLRP. The subsequent section delves into a comprehensive review of pertinent prior research, in which emphasis was placed on introducing various variants of LRP, as well as precise methods and heuristic and meta-heuristic methods for solving LRP. In the third section, we designed the framework and formal problem statement of the Binary Equilibrium Optimizer (BiEO). At the same time, the DACA strategy was proposed to solve multi-vehicle routing problems. Moving on, the fourth section Introduced the LRP mathematical model proposed in this paper to solve the case study. The fifth section offers an extensive exposition of empirical findings derived from applying the proposed BiEO algorithm to real-world scenarios. Lastly, the sixth section engages in a comprehensive discussion of the results and implications of this study’s contributions.
7. Conclusions
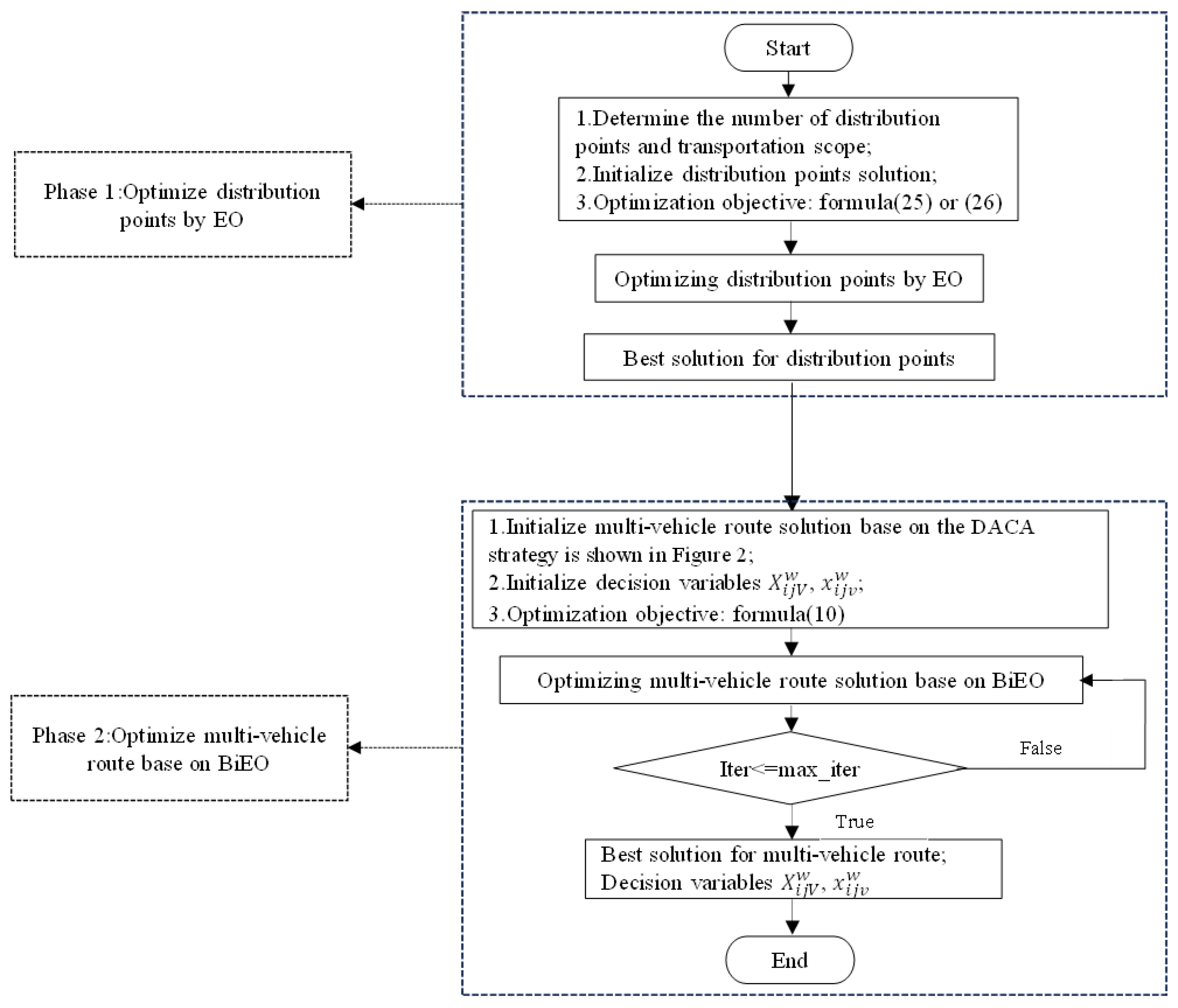
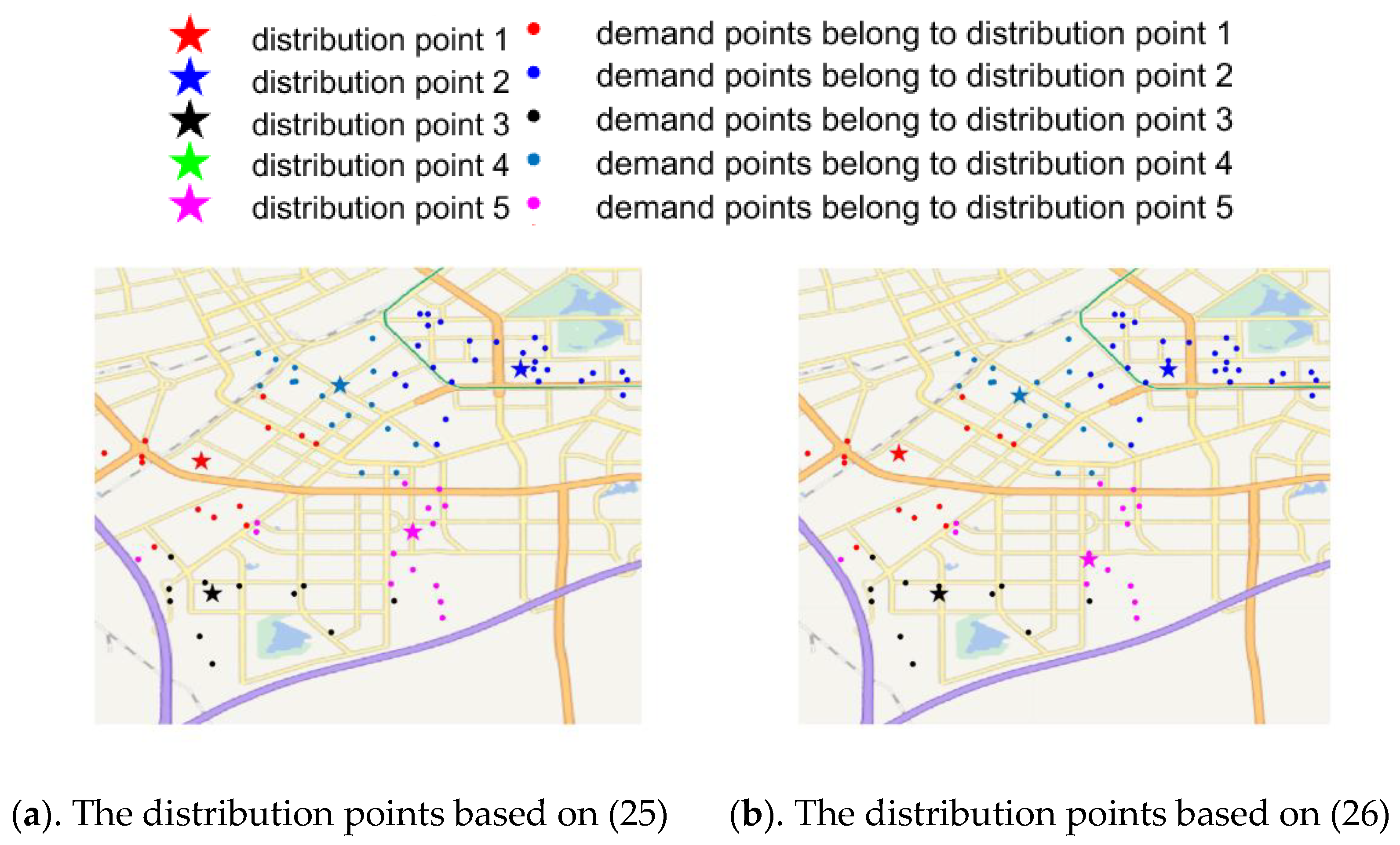
This paper proposed the BiEO algorithm, comprising two main components: (1) addressing the placement of distribution points location problem, Meanwhile, this article has designed two options for the location selection of distribution points, and (2) solving the VRP with capacity constraints for each distribution area, utilizing the DACA strategy in this study. A comparative analysis was conducted against combination-VRP experiments, revealing that the BiEO algorithm yielded superior outcomes within this problem framework compared to GA, DE, and PSO algorithms. Furthermore, the proposed DACA strategy effectively tackled both combinatorial problems and VRP simultaneously.
However, this paper also has some limitations. Firstly, in the optimization model of this article, we assume that each person’s daily material demand is fixed (weighing 400 g per person), which cannot truly reflect each person’s daily material demand. In the future, we may consider defining each person’s daily demand in the form of fuzzy numbers. In addition, due to the use of the DACA strategy in the solution, it is necessary to maintain consistency between the dimensions and the number of demand points in the distribution area during the solving process. Therefore, in this problem, when the transportation vehicle load cannot reach the next demand point in the distribution area, it will return and cannot transport to the demand points in other areas that meet the demand, which may lead to an overall increase in the cost of the problem. In future research, we may consider that transportation vehicles can deliver to demand points outside of this distribution area.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}