
Solvability, Approximation and Stability of Periodic Boundary Value Problem for a Nonlinear Hadamard Fractional Differential Equation with

Abstract
:1. Introduction
2. Preliminaries
- If , then , and is increasing with respect to
- For all ,
- If , then , for all
- For all , ⇔
- ⇔
- For all , there has a constant such that ;
- is a complete metric space;
- is continuous;
- For all , there has a constant such that .
3. Solvability and Approximation
- , and are some constants, .
- There has a constant such that
- There has a function such that, for all and ,
- , where .
4. Generalized Ulam-Hyers Stability
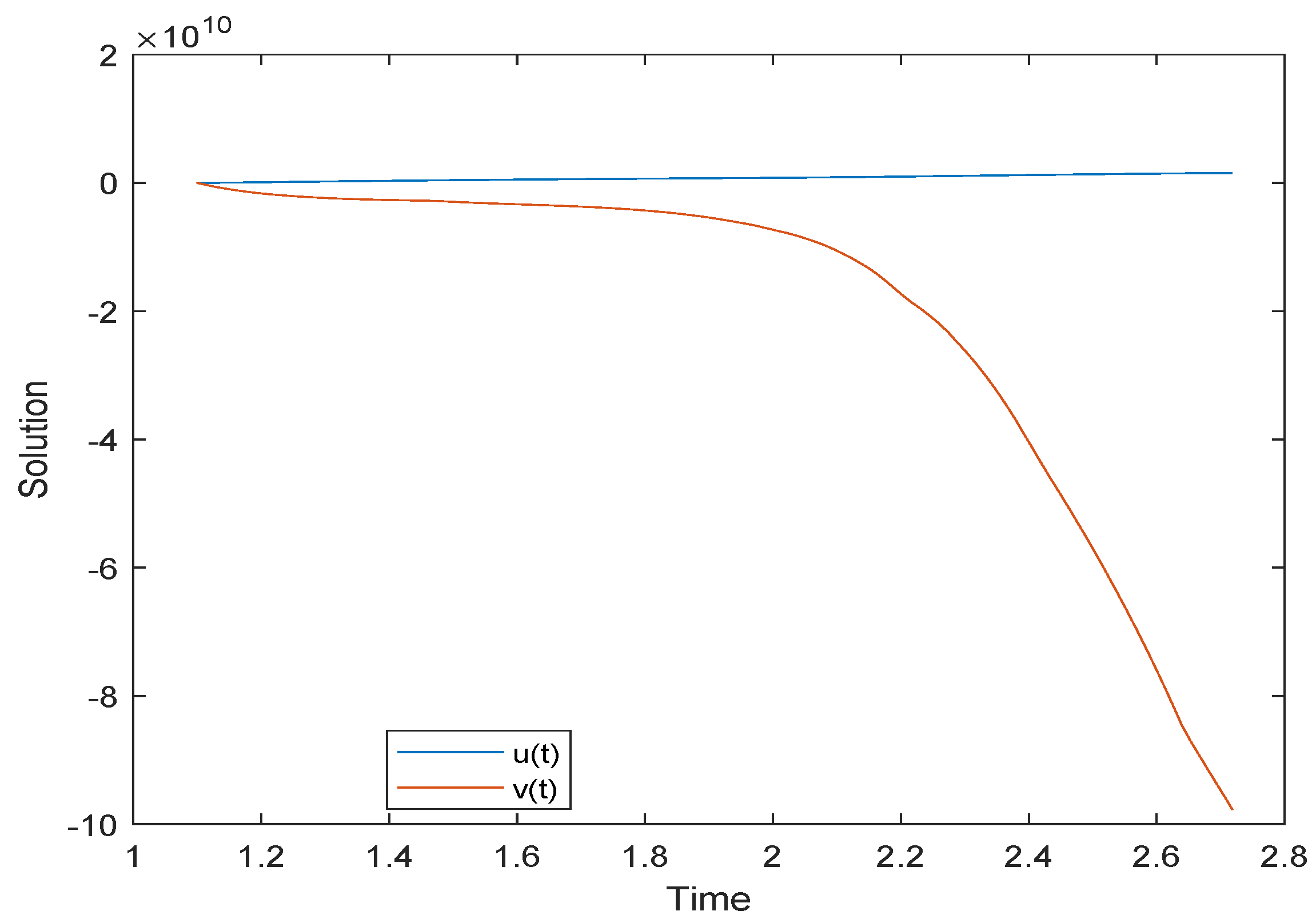
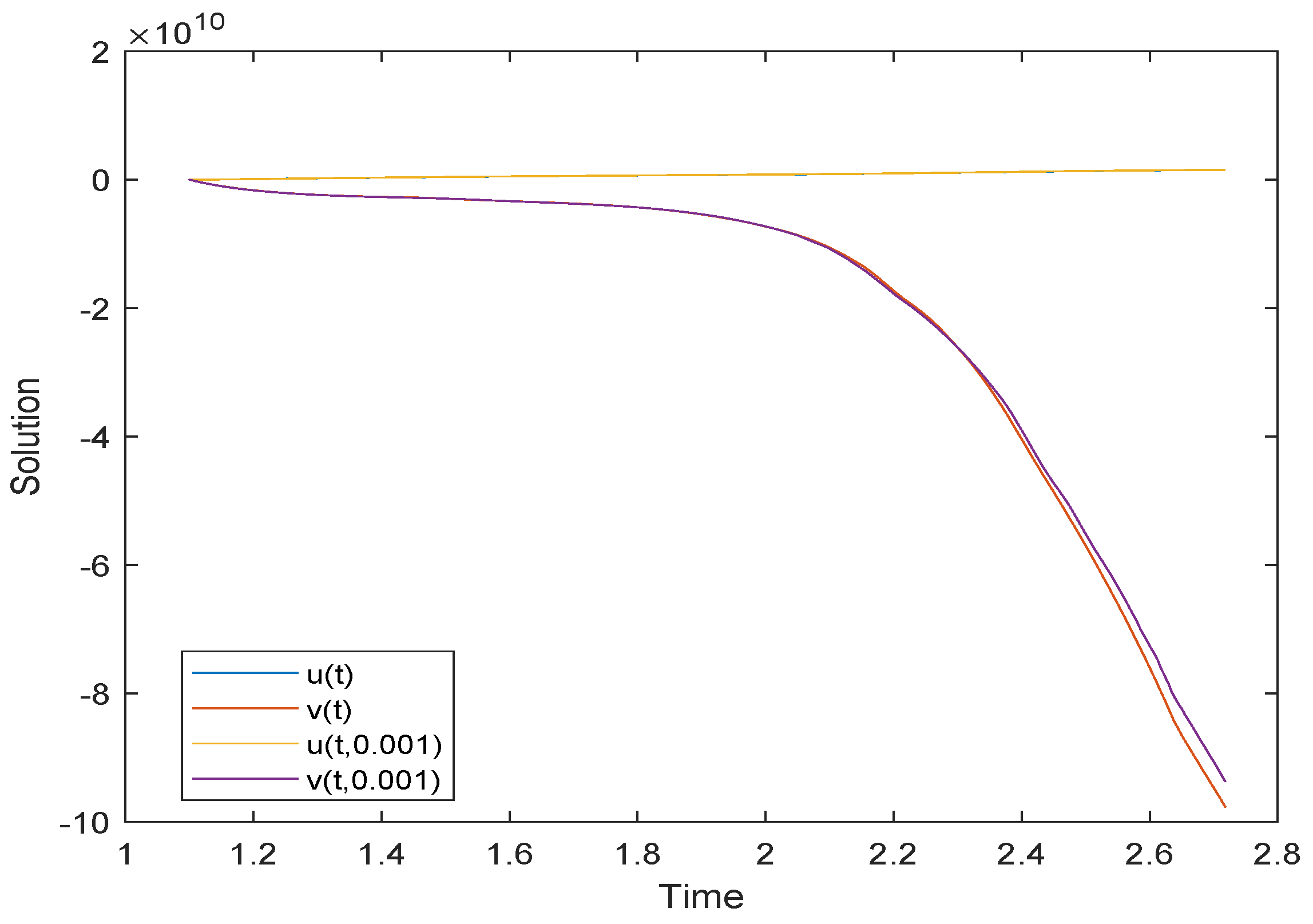
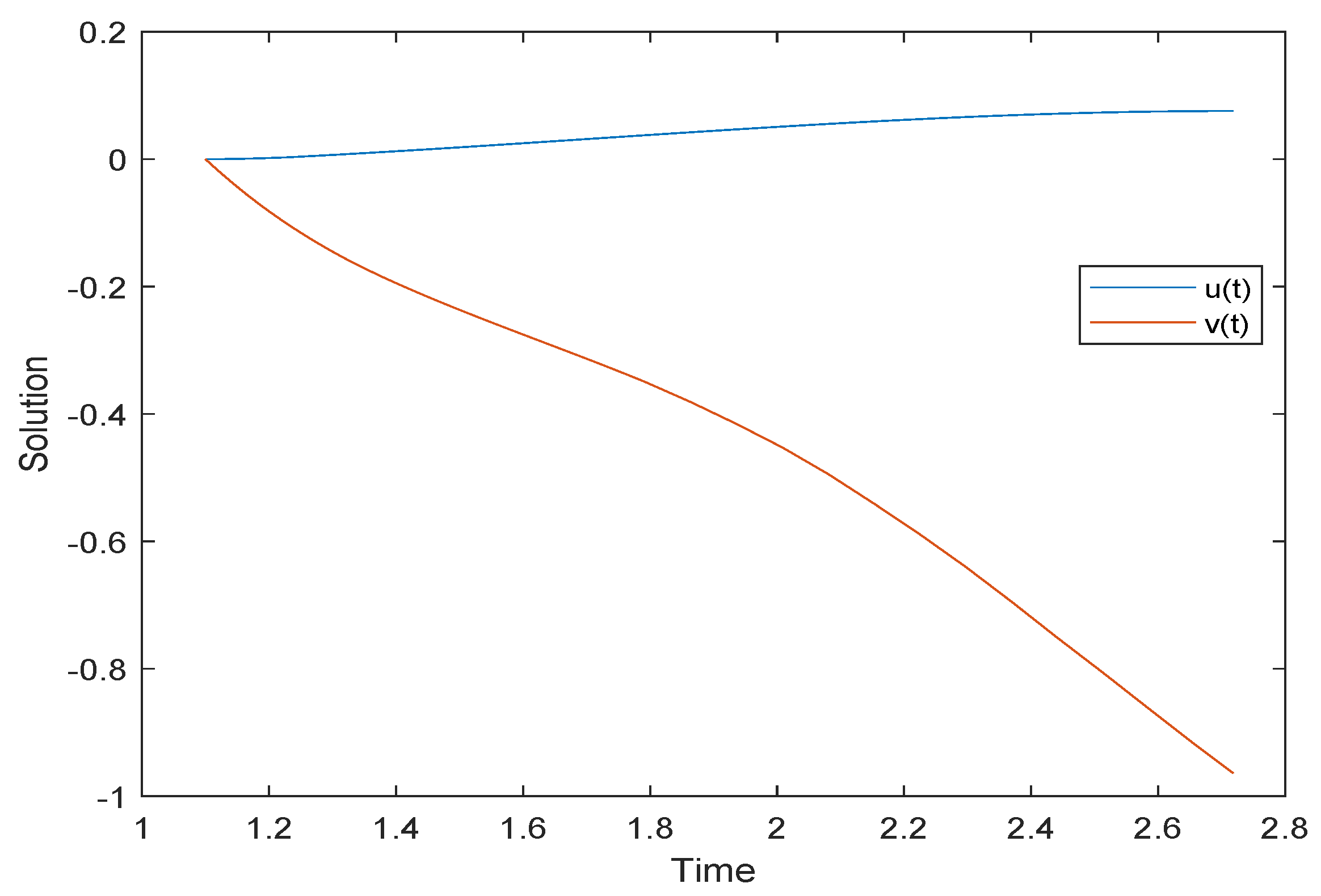
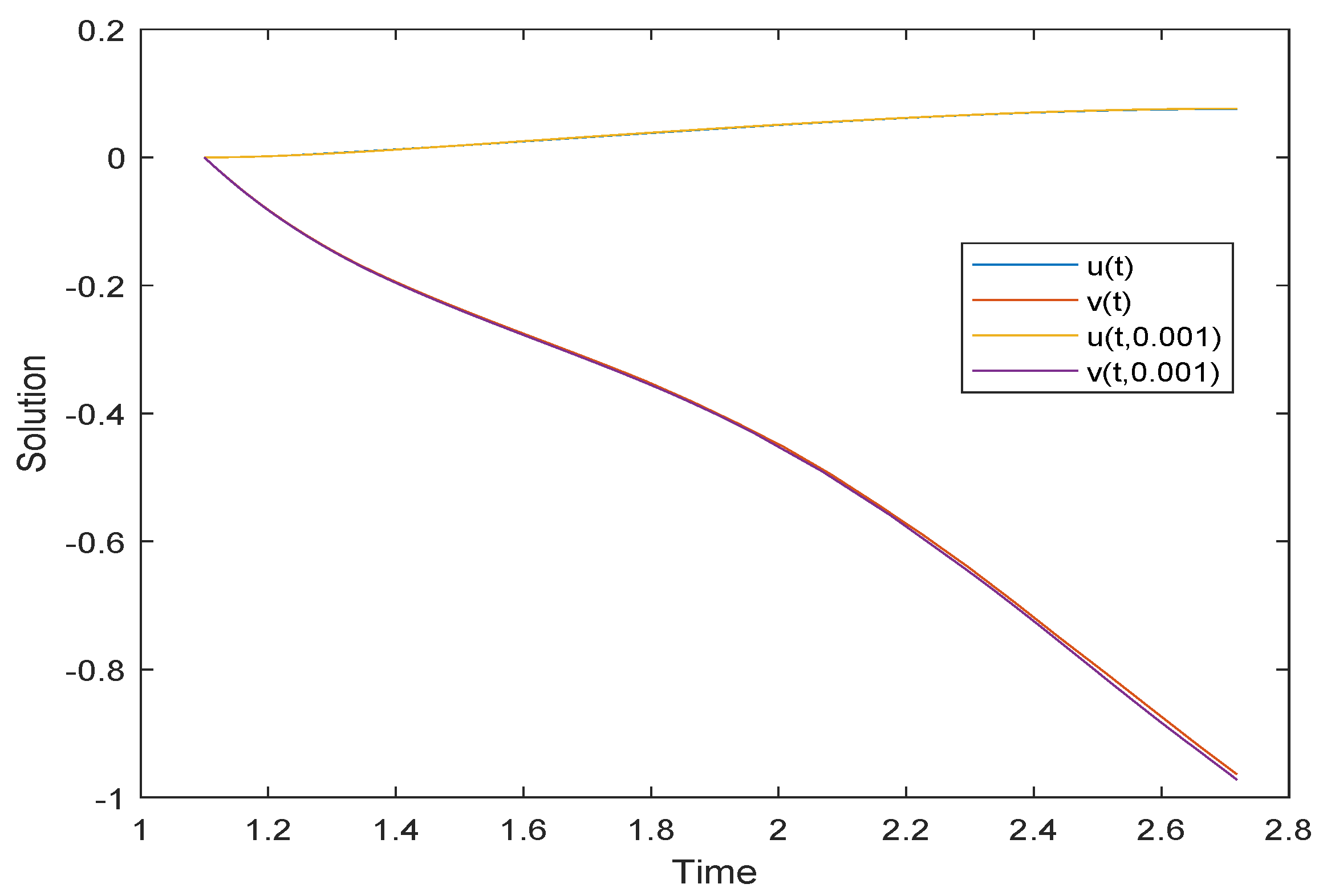
5. Two Examples and Simulations
6. Summaries
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Leibenson, L. General problem of the movement of a compressible uid in a porous medium. Izv. Akad. Nauk Kirg. SSR Ser. Biol. Nauk 1983, 9, 7–10. [Google Scholar]
- Alsaedi, A.; Luca, R.; Ahmad, B. Existence of positive solutions for a system of singular fractional boundary value problems with -Laplacian operators. Mathematics 2020, 8, 1890. [Google Scholar] [CrossRef]
- Zhao, K.H. Solvability and GUH-stability of a nonlinear CF-fractional coupled Laplacian equations. AIMS Math. 2023, 8, 13351–13367. [Google Scholar]
- Rao, S.; Ahmadini, A. Multiple positive solutions for system of mixed Hadamard fractional boundary value problems with (p1,p2)-Laplacian operator. AIMS Math. 2023, 8, 14767–14791. [Google Scholar] [CrossRef]
- Alsaedi, A.; Alghanmi, M.; Ahmad, B.; Alharbi, B. Uniqueness of solutions for a ψ-Hilfer fractional integral boundary value problem with the -Laplacian operator. Demonstr. Math. 2023, 56, 20220195. [Google Scholar]
- Sun, B.; Zhang, S.; Jiang, W. Solvability of fractional functional boundary-value problems with -Laplacian operator on a half-line at resonance. J. Appl. Anal. Comput. 2023, 13, 11–33. [Google Scholar]
- Ahmadkhanlu, A. On the existence and multiplicity of positive solutions for a -Laplacian fractional boundary value problem with an integral boundary condition. Filomat 2023, 37, 235–250. [Google Scholar]
- Chabane, F.; Benbachir, M.; Hachama, M.; Samei, M.E. Existence of positive solutions for -Laplacian boundary value problems of fractional differential equations. Bound. Value Probl. 2022, 2022, 65. [Google Scholar] [CrossRef]
- Rezapour, S.; Abbas, M.; Etemad, S.; Minh Dien, N. On a multi-point -Laplacian fractional differential equation with generalized fractional derivatives. Math. Method. Appl. Sci. 2023, 46, 8390–8407. [Google Scholar] [CrossRef]
- Boutiara, A.; Abdo, M.; Almalahi, M.; Shah, K.; Abdalla, B.; Abdeljawad, T. Study of Sturm-Liouville boundary value problems with -Laplacian by using generalized form of fractional order derivative. AIMS Math. 2022, 7, 18360–18376. [Google Scholar] [CrossRef]
- Salem, A.; Almaghamsi, L.; Alzahrani, F. An infinite system of fractional order with -Laplacian operator in a tempered sequence space via measure of noncompactness technique. Fractal Fract. 2021, 5, 182. [Google Scholar] [CrossRef]
- Jong, K.; Choi, H.; Kim, M.; Kim, K.; Jo, S.; Ri, O. On the solvability and approximate solution of a one-dimensional singular problem for a -Laplacian fractional differential equation. Chaos Soliton Fract. 2021, 147, 110948. [Google Scholar]
- Li, S.; Zhang, Z.; Jiang, W. Multiple positive solutions for four-point boundary value problem of fractional delay differential equations with -Laplacian operator. Appl. Numer. Math. 2021, 165, 348–356. [Google Scholar] [CrossRef]
- Hadamard, J. Essai sur l’étude des fonctions données par leur développment de Taylor. J. Math. Pures Appl. 1892, 8, 101–186. [Google Scholar]
- Kilbas, A.A. Hadamard-type fractional calculus. J. Korean Math. Soc. 2001, 38, 1191–1204. [Google Scholar]
- Butzer, P.L.; Kilbas, A.A.; Trujillo, J.J. Compositions of Hadamard-type fractional integration operators and the semigroup property. J. Math. Anal. Appl. 2002, 269, 387–400. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, B.; Ntouyas, S.K. On Hadamard fractional integro-differential boundary value problems. J. Appl. Math. Comput. 2015, 47, 119–131. [Google Scholar] [CrossRef]
- Aljoudi, S.; Ahmad, B.; Nieto, J.J.; Alsaedi, A. A coupled system of Hadamard type sequential fractional differential equations with coupled strip conditions. Chaos Soliton Fract. 2016, 91, 39–46. [Google Scholar]
- Benchohra, M.; Bouriah, S.; Graef, J.R. Boundary value problems for nonlinear implicit Caputo-Hadamard-type fractional differential equations with impulses. Mediterr. J. Math. 2017, 14, 206. [Google Scholar] [CrossRef]
- Huang, H.; Zhao, K.H.; Liu, X.D. On solvability of BVP for a coupled Hadamard fractional systems involving fractional derivative impulses. AIMS Math. 2022, 7, 19221–19236. [Google Scholar] [CrossRef]
- Zhao, K.H. Existence and UH-stability of integral boundary problem for a class of nonlinear higher-order Hadamard fractional Langevin equation via Mittag-Leffler functions. Filomat 2023, 37, 1053–1063. [Google Scholar] [CrossRef]
- Ulam, S. A Collection of Mathematical Problems-Interscience Tracts in Pure and Applied Mathmatics; Interscience: New York, NY, USA, 1906. [Google Scholar]
- Hyers, D. On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 1941, 27, 2222–2240. [Google Scholar] [CrossRef] [Green Version]
- Zada, A.; Waheed, H.; Alzabut, J.; Wang, X. Existence and stability of impulsive coupled system of fractional integrodifferential equations. Demonstr. Math. 2019, 52, 296–335. [Google Scholar] [CrossRef]
- Yu, X. Existence and β-Ulam-Hyers stability for a class of fractional differential equations with non-instantaneous impulses. Adv. Differ. Equ. 2015, 2015, 104. [Google Scholar] [CrossRef] [Green Version]
- Zhao, K.H. Stability of a nonlinear fractional Langevin system with nonsingular exponential kernel and delay control. Discret. Dyn. Nat. Soc. 2022, 2022, 9169185. [Google Scholar] [CrossRef]
- Chen, C.; Li, M. Existence and Ulam type stability for impulsive fractional differential systems with pure delay. Fractal Fract. 2022, 6, 742. [Google Scholar] [CrossRef]
- Zhao, K.H. Existence, stability and simulation of a class of nonlinear fractional Langevin equations involving nonsingular Mittag-Leffler kernel. Fractal Fract. 2022, 6, 469. [Google Scholar] [CrossRef]
- Zhao, K.H. Stability of a nonlinear Langevin system of ML-type fractional derivative affected by time-varying delays and differential feedback control. Fractal Fract. 2022, 6, 725. [Google Scholar] [CrossRef]
- Mehmood, M.; Abbas, A.; Akgul, A.; Asjad, M.I.; Eldin, S.M.; Abd El-Rahman, M.; Baleanu, D. Existence and stability results for coupled system of fractional differential equations involving AB-caputo derivative. Fractals 2023, 31, 2340023. [Google Scholar] [CrossRef]
- Yaghoubi, H.; Zare, A.; Rasouli, M.; Alizadehsani, R. Novel frequency-based approach to analyze the stability of polynomial fractional differential equations. Axioms 2023, 12, 147. [Google Scholar] [CrossRef]
- Alqahtani, R.; Ntonga, J.; Ngondiep, E. Stability analysis and convergence rate of a two-step predictor-corrector approach for shallow water equations with source terms. AIMS Math. 2023, 8, 9265–9289. [Google Scholar]
- Salama, F.; Ali, N.; Hamid, N. Fast O(N) hybrid Laplace transform-finite difference method in solving 2D time fractional diffusion equation. J. Math. Comput. Sci. 2021, 23, 110–123. [Google Scholar] [CrossRef]
- Jassim, H.; Hussain, M. On approximate solutions for fractional system of differential equations with Caputo-Fabrizio fractional operator. J. Math. Comput. Sci. 2021, 23, 58–66. [Google Scholar] [CrossRef]
- Can, N.; Nikan, O.; Rasoulizadeh, M.; Jafari, H.; Gasimov, Y.S. Numerical computation of the time non-linear fractional generalized equal width model arising in shallow water channel. Therm. Sci. 2020, 24, 49–58. [Google Scholar] [CrossRef]
- Akram, T.; Abbas, M.; Ali, A. A numerical study on time fractional Fisher equation using an extended cubic B-spline approximation. J. Math. Comput. Sci. 2021, 22, 85–96. [Google Scholar] [CrossRef]
- Ahmad, I.; Ahmad, H.; Thounthong, P.; Chu, Y.M.; Cesarano, C. Solution of multi-term time-fractional PDE models arising in mathematical biology and physics by local meshless method. Symmetry 2020, 12, 1195. [Google Scholar] [CrossRef]
- Murtaza, S.; Ahmad, Z.; Ali, I.; Chu, Y.M.; Cesarano, C. Analysis and numerical simulation of fractal-fractional order non-linear couple stress nanofluid with cadmium telluride nanoparticles. J. King Saud Univ. Sci. 2023, 35, 102618. [Google Scholar] [CrossRef]
- Zhao, K.H. Generalized UH-stability of a nonlinear fractional coupling (p1,p2)-Laplacian system concerned with nonsingular Atangana-Baleanu fractional calculus. J. Inequal. Appl. 2023; accepted. [Google Scholar]
- Ahmad, Z.; Bonanomi, G.; di Serafino, D.; Giannino, F. Transmission dynamics and sensitivity analysis of pine wilt disease with asymptomatic carriers via fractal-fractional differential operator of Mittag-Leffler kernel. Appl. Numer. Math. 2023, 185, 446–465. [Google Scholar] [CrossRef]
- Ahmad, Z.; El-Kafrawy, S.; Alandijany, T.; Mirza, A.A.; El-Daly, M.M.; Faizo, A.A.; Bajrai, L.H.; Kamal, M.A.; Azhar, E.I. A global report on the dynamics of COVID-19 with quarantine and hospitalization: A fractional order model with non-local kernel. Comput. Biol. Chem. 2022, 98, 107645. [Google Scholar] [CrossRef]
- Ahmad, Z.; Ali, F.; Khan, N.; Khan, I. Dynamics of fractal-fractional model of a new chaotic system of integrated circuit with Mittag-Leffler kernel. Chaos Soliton. Fract. 2021, 153, 111602. [Google Scholar] [CrossRef]
- Wang, F.; Asjad, M.; Zahid, M.; Iqbal, A.; Ahmad, H.; Alsulami, M.D. Unsteady thermal transport flow of Casson nanofluids with generalized Mittag-Leffler kernel of Prabhakar’s type. J. Mater. Res. Technol. 2021, 14, 1292–1300. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Rus, I.A. On a fixed point theorem of Maia. Stud. Univ. Babes-Bolyai Math. 1977, 22, 40–42. [Google Scholar]
- Wardowski, D. Fixed points of a new type of contractive mappings in complete metric spaces. Fixed Point Theory Appl. 2012, 2012, 94. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, R.; O’Regan, D. Fixed point theory for generalized contractions on spaces with two metrics. J. Math. Anal. Appl. 2000, 248, 402–414. [Google Scholar] [CrossRef] [Green Version]
- Karapinar, E.; Fulga, A.; Agarwal, R. A survey: F-contractions with related fixed point results. J. Fixed Point Theory Appl. 2020, 22, 69. [Google Scholar] [CrossRef]
- Mehmood, N.; Khan, I.; Nawaz, M.; Ahmad, N. Existence results for ABC-fractional BVP via new fixed point results of F-Lipschitzian mappings. Demonstr. Math. 2022, 55, 452–469. [Google Scholar] [CrossRef]
- Zhao, K.H. Local exponential stability of several almost periodic positive solutions for a classical controlled GA-predation ecosystem possessed distributed delays. Appl. Math. Comput. 2023, 437, 127540. [Google Scholar] [CrossRef]
- Zhao, K.H. Existence and stability of a nonlinear distributed delayed periodic AG-ecosystem with competition on time scales. Axioms 2023, 12, 315. [Google Scholar] [CrossRef]
- Zhao, K.H. Global stability of a novel nonlinear diffusion online game addiction model with unsustainable control. AIMS Math. 2022, 7, 20752–20766. [Google Scholar] [CrossRef]
- Zhao, K.H. Attractor of a nonlinear hybrid reaction-diffusion model of neuroendocrine transdifferentiation of human prostate cancer cells with time-lags. AIMS Math. 2023, 8, 14426–14448. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 | 2.2 | 2.4 | 2.6 | 2.7183 | |
|---|---|---|---|---|---|---|---|---|---|---|
| u | ||||||||||
| 0.0079 | 0.0314 | 0.0497 | 0.0645 | 0.0786 | 0.0963 | 0.1210 | 0.1448 | 0.1501 | ||
| 0.0080 | 0.0318 | 0.0501 | 0.0650 | 0.0790 | 0.0971 | 0.1218 | 0.1447 | 0.1498 | ||
| t | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 | 2.2 | 2.4 | 2.6 | 2.7183 | |
|---|---|---|---|---|---|---|---|---|---|---|
| u | ||||||||||
| 0.1653 | 0.2690 | 0.3344 | 0.4302 | 0.7319 | 1.7307 | 4.0310 | 7.5843 | 9.7746 | ||
| 0.1671 | 0.2720 | 0.3355 | 0.4327 | 0.7319 | 1.7749 | 3.9019 | 7.2621 | 9.3765 | ||
| t | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 | 2.2 | 2.4 | 2.6 | 2.7183 | |
|---|---|---|---|---|---|---|---|---|---|---|
| u | ||||||||||
| 0.0018 | 0.0121 | 0.0252 | 0.0384 | 0.0507 | 0.0614 | 0.0699 | 0.0749 | 0.0757 | ||
| 0.0019 | 0.0122 | 0.0254 | 0.0387 | 0.0511 | 0.0619 | 0.0704 | 0.0754 | 0.0763 | ||
| t | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 | 2.2 | 2.4 | 2.6 | 2.7183 | |
|---|---|---|---|---|---|---|---|---|---|---|
| u | ||||||||||
| 0.0818 | 0.1947 | 0.2757 | 0.3530 | 0.4481 | 0.5721 | 0.7189 | 0.8741 | 0.9639 | ||
| 0.0824 | 0.1960 | 0.2779 | 0.3556 | 0.4516 | 0.5767 | 0.7244 | 0.8828 | 0.9723 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.
Solvability, Approximation and Stability of Periodic Boundary Value Problem for a Nonlinear Hadamard Fractional Differential Equation with
Zhao K.
Solvability, Approximation and Stability of Periodic Boundary Value Problem for a Nonlinear Hadamard Fractional Differential Equation with
Zhao, Kaihong.
2023. "Solvability, Approximation and Stability of Periodic Boundary Value Problem for a Nonlinear Hadamard Fractional Differential Equation with