
Slow Manifolds for Stochastic Koper Models with Stable Lévy Noises

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- where
3. Stability Analysis
4. Random Slow Manifolds
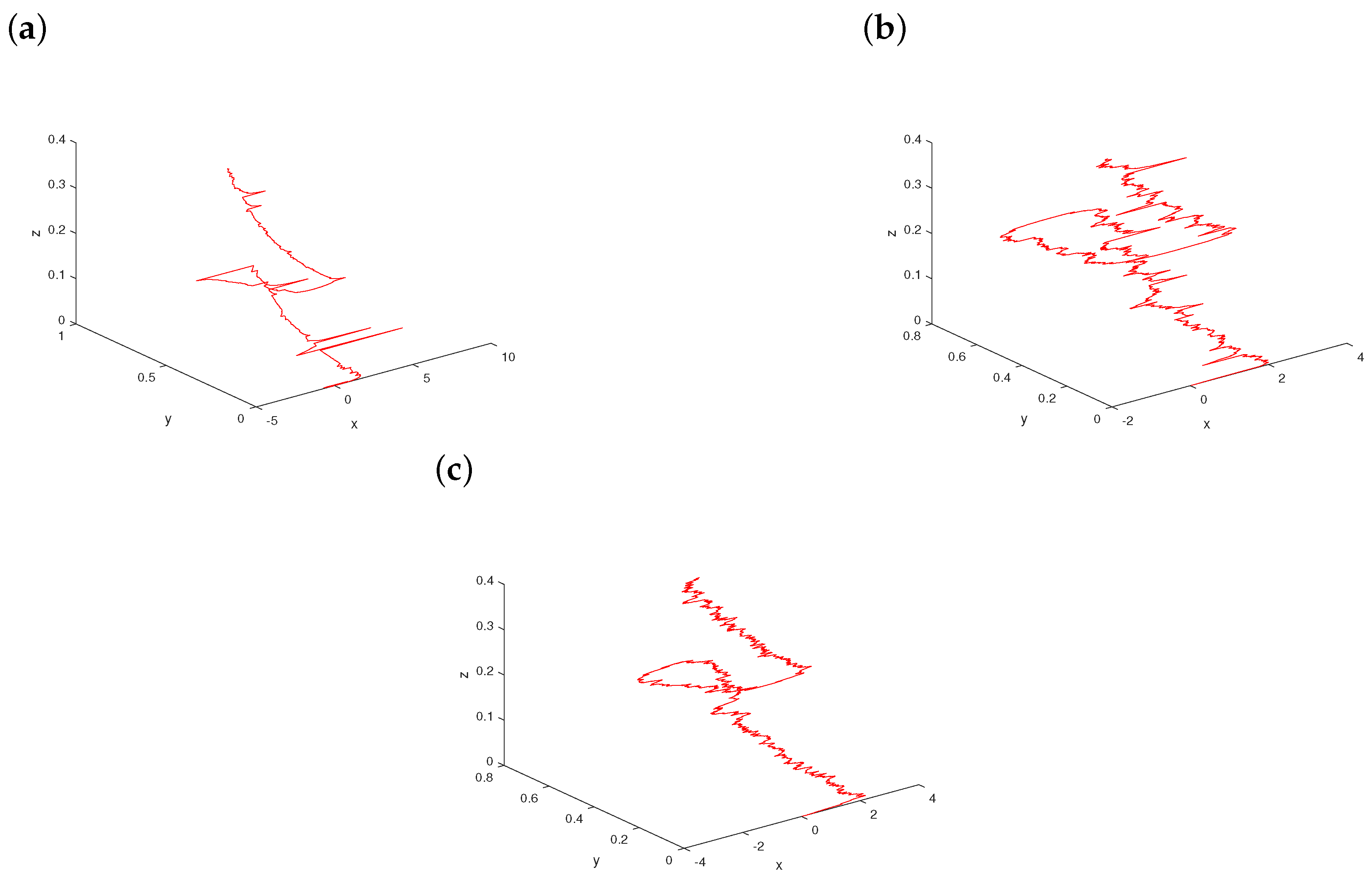
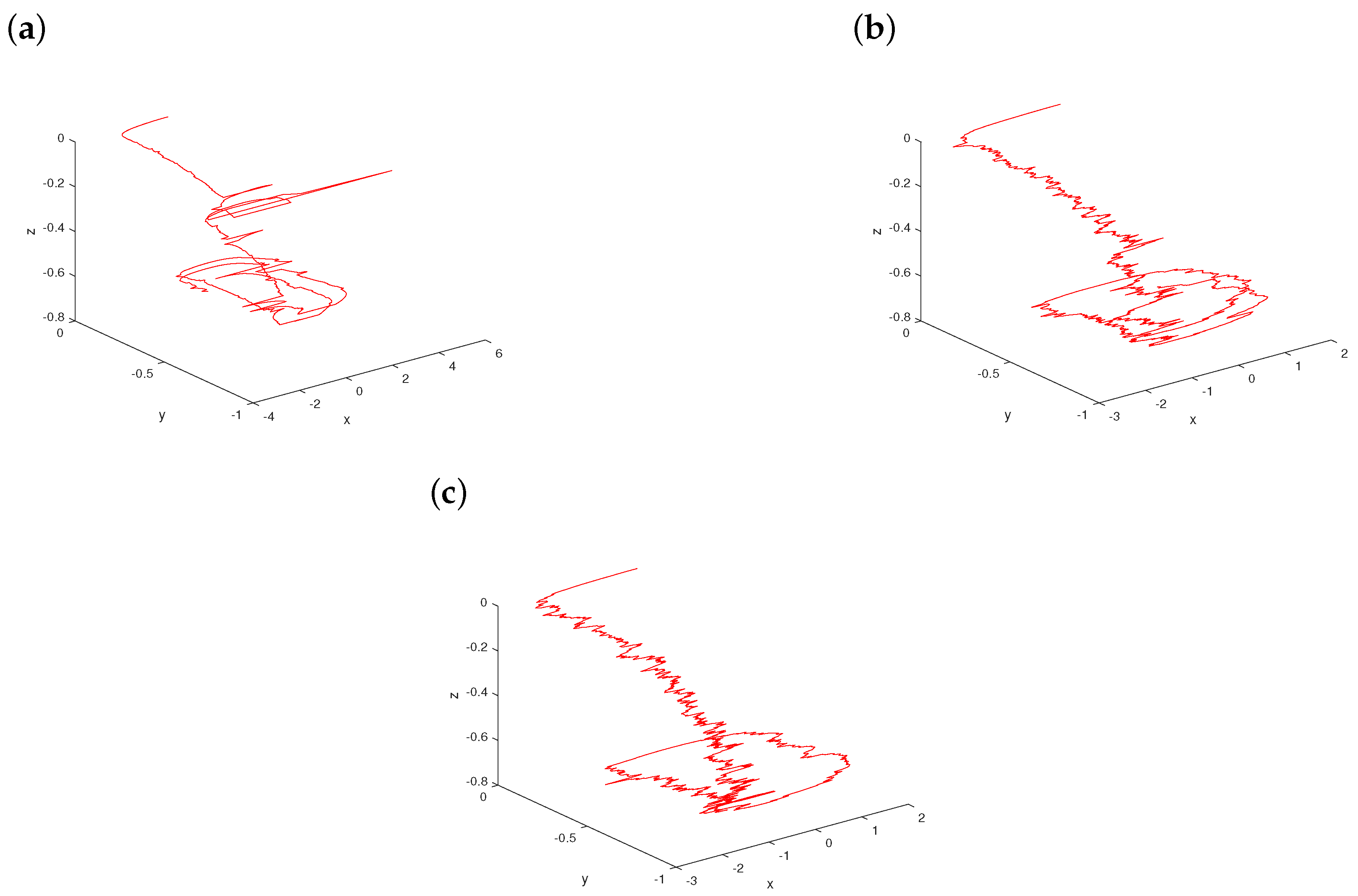
5. Examples
6. Conclusions and Future Challenges
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Koper, M.T.M. Bifurcations of mixed-mode oscillations in a three-variable autonomous Van der Pol-Duffing model with a cross-shaped phase diagram. Phys. D 1995, 80, 72–94. [Google Scholar] [CrossRef]
- Balabaev, M. Invariant manifold of variable stability in the Koper model. J. Phys. Conf. Ser. 2019, 1368, 042003. [Google Scholar] [CrossRef]
- Bates, P.W.; Lu, K.; Zeng, C. Existence and Persistence of Invariant Manifolds for Semiflows in Banach Space; American Mathematical Society: Providence, RI, USA, 1998. [Google Scholar]
- Henry, D. Geometric Theory of Semilinear Parabolic Equations; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Chicone, C.; Latushkin, Y. Center manifolds for infinite dimensional nonautonomous differential equations. J. Differ. Equ. 1997, 141, 356–399. [Google Scholar] [CrossRef] [Green Version]
- Chow, S.N.; Lu, K.; Lin, X.B. Smooth foliations for flows in Banach space. J. Differ. Equ. 1991, 94, 266–291. [Google Scholar] [CrossRef] [Green Version]
- Ruelle, D. Characteristic exponents and invariant manifolds in Hilbert space. Ann. Math. 1982, 115, 243–290. [Google Scholar] [CrossRef]
- Caraballo, T.; Chueshov, I.; Langa, J.A. Existence of invariant manifolds for coupled parabolic and hyperbolic stochastic partial differential equations. Nonlinearity 2005, 18, 747–767. [Google Scholar] [CrossRef]
- Chow, S.N.; Lu, K. Invariant manifolds for flows in Banach spaces. J. Differ. Equ. 1988, 74, 285–317. [Google Scholar] [CrossRef] [Green Version]
- Yuan, S.; Li, Y.; Zeng, Z. Stochastic bifurcations and tipping phenomena of insect outbreak systems driven by α-stable Lévy processes. Math. Model. Nat. Phenom. 2022, 17, 34. [Google Scholar] [CrossRef]
- Fu, H.; Liu, X.; Duan, J. Slow manifolds for multi-time-scale stochastic evolutionary systems. Comm. Math. Sci. 2013, 11, 141–162. [Google Scholar]
- Schmalfuss, B.; Schneider, K.R. Invariant manifolds for random dynamical systems with slow and fast variables. J. Dyn. Differ. Equ. 2008, 20, 133–164. [Google Scholar] [CrossRef]
- Wang, W.; Roberts, A. Slow manifold and averaging for slow-fast stochastic differential system. J. Math. Anal. Appl. 2013, 398, 822–839. [Google Scholar] [CrossRef]
- Ren, J.; Duan, J.; Jones, C.K.R.T. Approximation of random slow manifolds and settling of inertial particles under uncertainty. J. Dyn. Differ. Equ. 2015, 27, 961–979. [Google Scholar] [CrossRef] [Green Version]
- Ren, J.; Duan, J.; Wang, X. A parameter estimation method based on random slow manifolds. Appl. Math. Model. 2015, 39, 3721–3732. [Google Scholar] [CrossRef]
- Yuan, S.; Blömker, D.; Duan, J. Stochastic turbulence for Burgers equation driven by cylindrical Lévy process. Stoch. Dynam. 2022, 22, 2240004. [Google Scholar] [CrossRef]
- Qiao, M.; Yuan, S. Analysis of a stochastic predator-prey model with prey subject to disease and Lévy noise. Stochastics Dyn. 2019, 19, 1950038. [Google Scholar] [CrossRef]
- Yuan, S.; Blömker, D. Modulation and amplitude equations on bounded domains for nonlinear SPDEs driven by cylindrical α-stable Lévy processes. SIAM J. Appl. Dyn. Syst. 2022, 21, 1748–1777. [Google Scholar] [CrossRef]
- Yuan, S.; Zeng, Z.; Duan, J. Stochastic bifurcation for two-time-scale dynamical system with α-stable Lévy noise. J. Stat. Mech. 2021, 2021, 033204. [Google Scholar] [CrossRef]
- Yuan, S.; Hu, J.; Liu, X.; Duan, J. Slow manifolds for dynamical systems with non-Gaussian stable Lévy noise. Anal. Appl. 2019, 17, 477–511. [Google Scholar] [CrossRef]
- Zulfiqar, H.; He, Z.; Yang, M.; Duan, J. Slow manifold and parameter estimation for a nonlocal fast-slow dynamical system with brownian motion. Acta Math. Sci. 2021, 41, 1057–1080. [Google Scholar] [CrossRef]
- Zulfiqar, H.; Yuan, S.; He, Z.; Duan, J. Slow manifolds for a nonlocal fast-slow stochastic system with stable Lévy noise. J. Math. Phys. 2019, 60, 091501. [Google Scholar] [CrossRef]
- Applebaum, D. Lévy Processes and Stochastic Calculus; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Duan, J.; Lu, K.; Schmalfuss, B. Smooth stable and unstable manifolds for stochastic evolutionary equations. J. Dyn. Differ. Equ. 2004, 16, 949–972. [Google Scholar] [CrossRef] [Green Version]
- Chao, Y.; Wei, P.; Yuan, S. Invariant foliations for stochastic dynamical systems with multiplicative stable Lévy noise. Electron. J. Differ. Equ. 2019, 2019, 1–21. [Google Scholar]
- Wei, H.H. Weak convergence of probability measures on metric spaces of nonlinear operators. Bull. Inst. Math. Acad. Sin. 2016, 11, 485–519. [Google Scholar] [CrossRef] [Green Version]
- Arnold, L. Random Dynamical Systems; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Duan, J. An Introduction to Stochastic Dynamics; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar]
- Protter, P. Stochastic Integration and Differential Equations; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Yang, X.; Xu, Y.; Wang, R.; Jiao, Z. The central limit theorem for slow-fast systems with Lévy noise. Appl. Math. Lett. 2022, 128, 107897. [Google Scholar] [CrossRef]
- Jacod, J.; Shiryaev, A. Limit Theorems for Stochastic Processes; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Castaing, C.; Valadier, M. Convex Analysis and Measurable Multifunctions; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Moradi, S.; del-Castillo-Negrete, D.; Anderson, J. Charged particle dynamics in the presence of non-Gaussian Lévy electrostatic fluctuations. Phys. Plasmas 2016, 23, 090704. [Google Scholar] [CrossRef] [Green Version]
- Yuan, S.; Wang, Z. Bifurcation and chaotic behaviour in stochastic Rosenzweig-MacArthur prey-predator model with non-Gaussian stable Lévy noise. Int. J. Non-Linear Mech. 2023, 150, 104339. [Google Scholar] [CrossRef]
- Li, Y.; Yuan, S.; Xu, S. Controlling mean exit time of stochastic dynamical systems based on quasipotential and machine learning. arXiv 2022, arXiv:2209.13098.2006. [Google Scholar] [CrossRef]
- Huang, Y.; Chao, Y.; Yuan, S.; Duan, J. Characterization of the most probable transition paths of stochastic dynamical systems with stable Lévy noise. J. Math. Phys. 2019, 2019, 063204. [Google Scholar] [CrossRef] [Green Version]
- Tesfay, A.; Yuan, S.; Tesfay, D.; Brannan, J. Most Probable Dynamics of the Single-Species with Allee Effect under Jump-diffusion Noise. arXiv 2021, arXiv:2112.07234. [Google Scholar]
- Tesfay, A.; Tesfay, D.; Yuan, S.; Brannan, J.; Duan, J. Stochastic bifurcation in single-species model induced by α-stable Lévy noise. J. Stat. Mech. 2021, 2021, 103403. [Google Scholar] [CrossRef]
- Yuan, S. Code. Github. 2022. Available online: https://github.com/ShenglanYuan/Slow-manifolds-for-stochastic-Koper-models-with-stable-L-vy-noises (accessed on 7 December 2022).






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zulfiqar, H.; Yuan, S.; Saleem, M.S. Slow Manifolds for Stochastic Koper Models with Stable Lévy Noises. Axioms 2023, 12, 261. https://doi.org/10.3390/axioms12030261
Zulfiqar H, Yuan S, Saleem MS. Slow Manifolds for Stochastic Koper Models with Stable Lévy Noises. Axioms. 2023; 12(3):261. https://doi.org/10.3390/axioms12030261
Chicago/Turabian StyleZulfiqar, Hina, Shenglan Yuan, and Muhammad Shoaib Saleem. 2023. "Slow Manifolds for Stochastic Koper Models with Stable Lévy Noises" Axioms 12, no. 3: 261. https://doi.org/10.3390/axioms12030261