In session 2, the described work was carried out in the classroom, referring to the characteristics of a problem to be used for didactic purposes. The teams prepared the document D2 with the characteristics and shared it with the other teams of the same group through a forum on the Moodle platform of the course. Then, as autonomous work outside the classroom, they elaborated the design of a robotics problem in a document called D3.
This section presents the results regarding the analysis of these two documents.
3.2.2. Results Related to the Didactic Suitability of the Designs
To know the didactic suitability of the designs of each team, in total 17 designs, the evidence of the different indicators of each of the components of the DSC of the OSA have been analyzed.
Table 6 was prepared by counting the number of designs that show evidence of each of the components of DSC and calculating the percentage of the 17 total designs that the number represents. In general, it can be observed that there is more evidence of indicators of affective suitability (in 64.7% of the designs); secondly, the designs are concerned with evidencing interactional suitability (in 52.9% of the designs), followed by epistemic suitability (43.5% of the designs) and mediational suitability (41.2%). Where we obtain less evidence is ecological suitability (in 11.8% of designs).
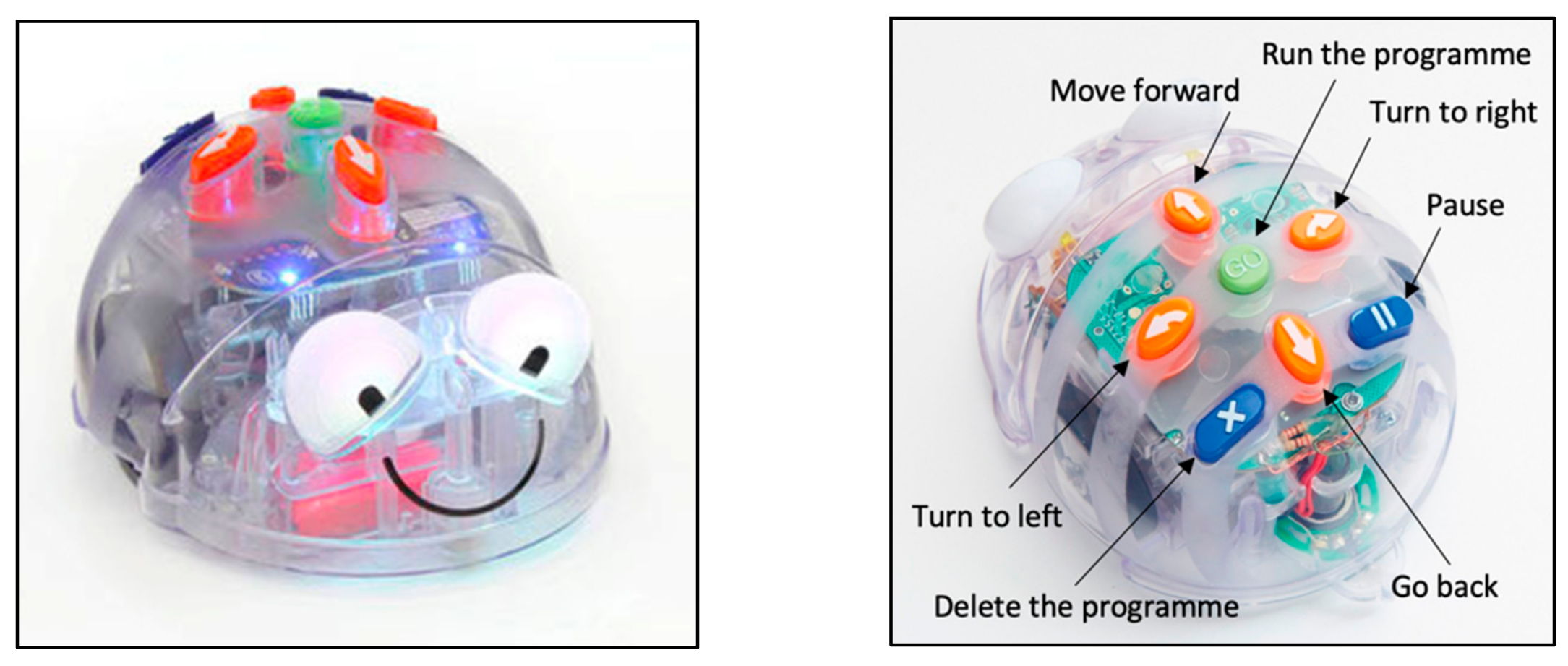
Related to epistemic suitability, half of the designs (9 out of 17) show errors regarding the computational language when they describe the instructions that students should give to the robot to make the programmed path. For example, when explaining the movements that the robot must make, they use “straight” or “up” instead of the instruction “move forward”, “down” instead of the instruction “go back”, and “right” instead of “turn right”:
Guide the robot straight twice, once to the right, and once straight
(A8)
Children must count how many movements they have to make in each direction (3 up, two right, and one down)
(A7)
Accordingly, almost two-thirds of the designs (11 out of 17) present ambiguities, either of didactic aspects in the design of the activity or of mathematical aspects. For example, six of the designs refer to the robot having to make the path “shorter”, “faster” or “easier” but do not define what they mean by this type of trajectory. Sometimes they use, regarding trajectories, “short”, “fast” and “simple” as synonyms.
They do not refer to the programming sequence or algorithm for defining the programmed route, for example:
Students will have to use the Blue-Bot’s directions to check it [if the route is correct] and thus find the final solution to the problem
(A7)
Sometimes, they do not take into account their programming, nor do they consider instructions other than “moving forward”. For example:
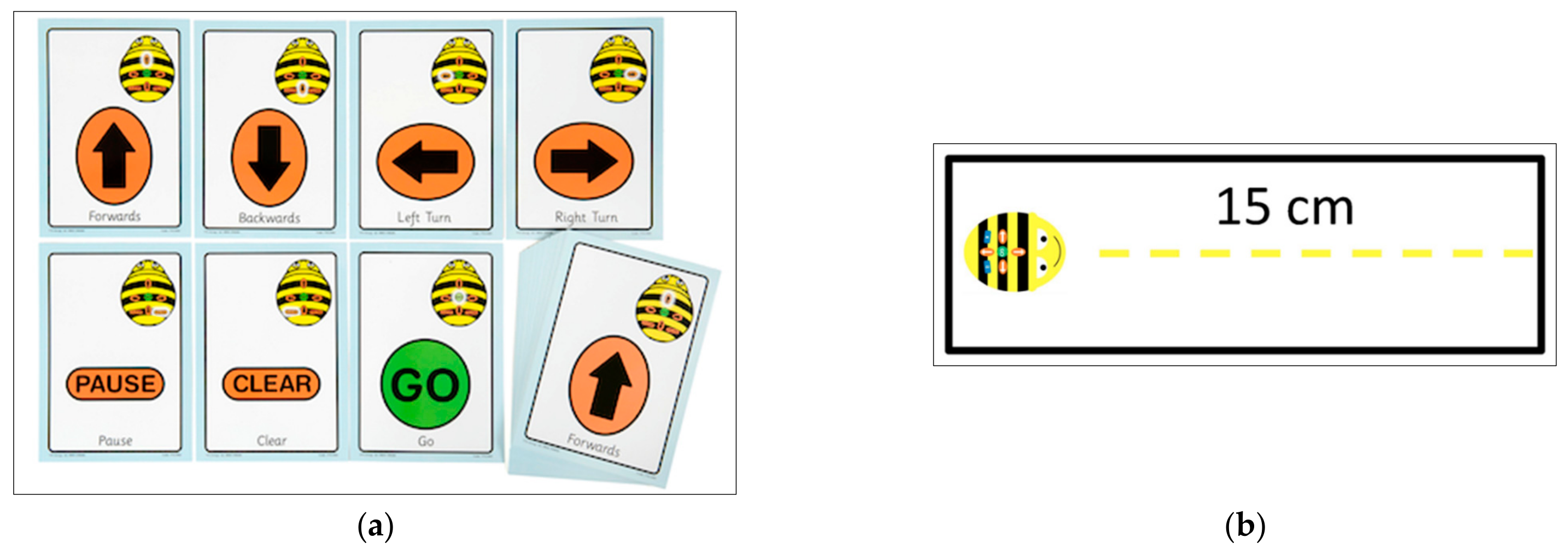
The carpet is designed so that each frame is a movement of the Blue-Bot, which is 15 cm, and so children can count how many squares are needed to reach their goal
(B1)
However, all designs from all teams promote a wealth of relevant processes, such as problem-solving, direct modeling to respond with more than one possible solution, and argumentation, although only 10 of the designs make a direct allusion to “programming”.
Two-thirds of the designs (12 out of 17) only provide for the use of oral language to say aloud the robot’s programming sequence so that it runs the desired path before pressing the keys on the robot. The A4 team, in addition to that, suggests that children represent the trajectory on the floor with the 15 cm rectangular cards and/or draw it on a blank sheet. The B8 team proposes that students use paper and pencil to draw a “map” of the route that the robot must take. The A8 and B3 teams are the only ones that propose that students can “write” the algorithm with instruction cards, although they propose it optionally.
Related to cognitive suitability, only four of the designs explicitly state that the previous knowledge of the students is considered, and of these, only two refer directly to the use of educative robots. Only one of the designs explains that the intended meanings have a manageable difficulty for students, and another anticipates certain didactic variables that progressively increase the difficulty of the task:
The elements that hinder the route can be changed [of place] to pose various challenges, also the start and end square [of the carpet]
(A7)
Only three of the designs include complementary activities that could be considered extension and reinforcement to adapt the curriculum to the individual differences of the students. On the other hand, this highlights that none of the team designs includes the planning of any type of evaluation of student learning.
In general, all designs pose activities of high cognitive demand since they activate processes such as the formulation and testing of hypotheses, and two of them propose changes in representation. In more than half of the designs (11 out of 17), moments of reflection on the activity carried out and what has been learned, on how to improve the process, on other possible responses, etc., are planned. These moments of reflection are intended to promote metacognitive processes.
It is important to note that none of the designs includes the teaching and learning objectives of the activity, nor do they specify the specific knowledge (about mathematics, about CT, for example) that students are expected to be able to develop through the programmed activity.
All teams are concerned about high interactional suitability. In the first place, all the works are concerned to a greater or lesser extent with how the student–teacher interaction should be. Only a single design does not describe the presentation of the problem that the teacher must perform to contextualize it. In more than half (10 out of 17) of the designs, in addition to indicating how the problematic situation should be presented, the specific question that the teacher must ask is explicit so that the problem posed is clear. In one-fourth (6 out of 17) of the designs, it is established that the teacher must observe the students, supervise and guide the development of the activity, resolve conflicts, ask good questions and engage in dialogue that helps the students understand.
The teacher will adopt an understandable, rich, and explanatory dialogue. You must include in your explanation examples that help to understand the objective of the activity
(A6)
In the case that the hypothesis is wrong, the teachers will have to pose questions so that the children realize why they have made a mistake and can formulate a new hypothesis
(B4)
All designs promote interaction between students; in addition, in more than two-thirds of the designs (13 out of 17), there are spaces for discussion or assembly for students to share ideas, and in one-third of the designs (6 out of 17), students are expected to reach a consensus among themselves, either in large groups or among the students of each small workgroup.
Later, all the children will decide which is the easiest and fastest way to get there
(A2)
Together a final hypothesis is decided to reach the other class
(A4)
Some of the designs (3 out of 17) are very directed, giving the teacher a strong interventionist role. However, more than two-thirds of the designs (12 out of 17) contemplate moments when students take responsibility for the activity (exploration with robots, formulation of hypotheses, validation of hypotheses using robots, group argumentation, etc.), thus favoring the autonomy of students.
Mediational suitability has been analyzed in the designs that refer both to the material resources that are made available to the students and the ideal organization of the students, considering the conditions of the classroom. All designs plan the use of Blue-Bot as it was a condition of the session 2 task; therefore, it has been identified that other material resources were indicated.
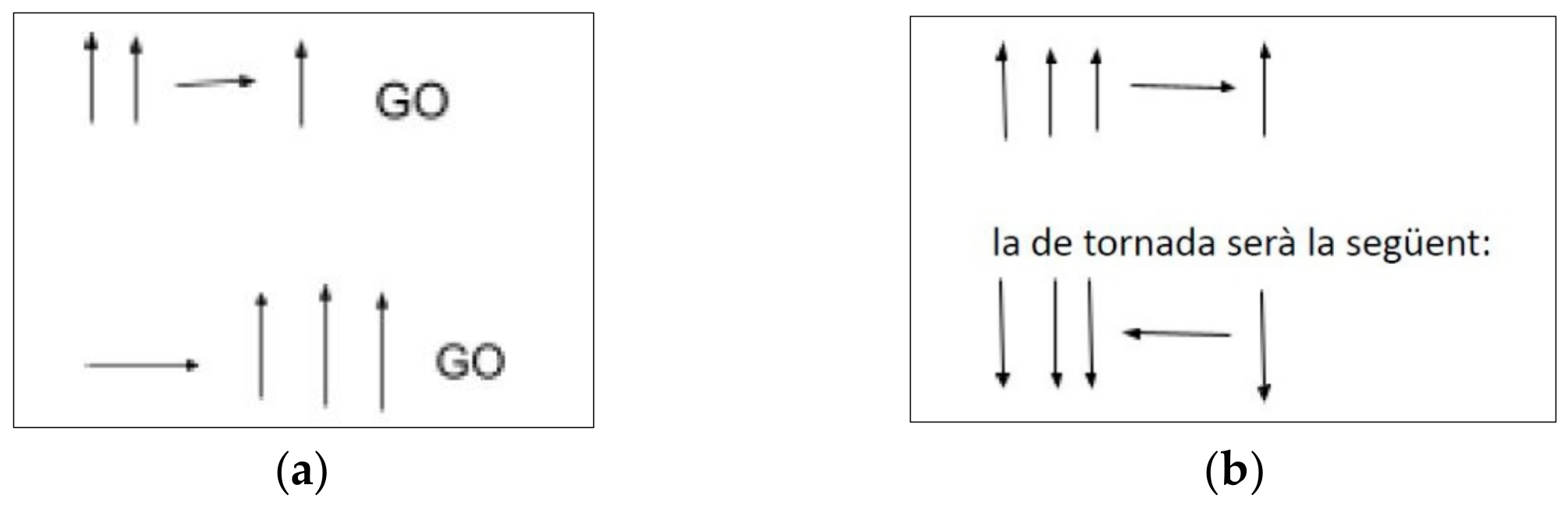
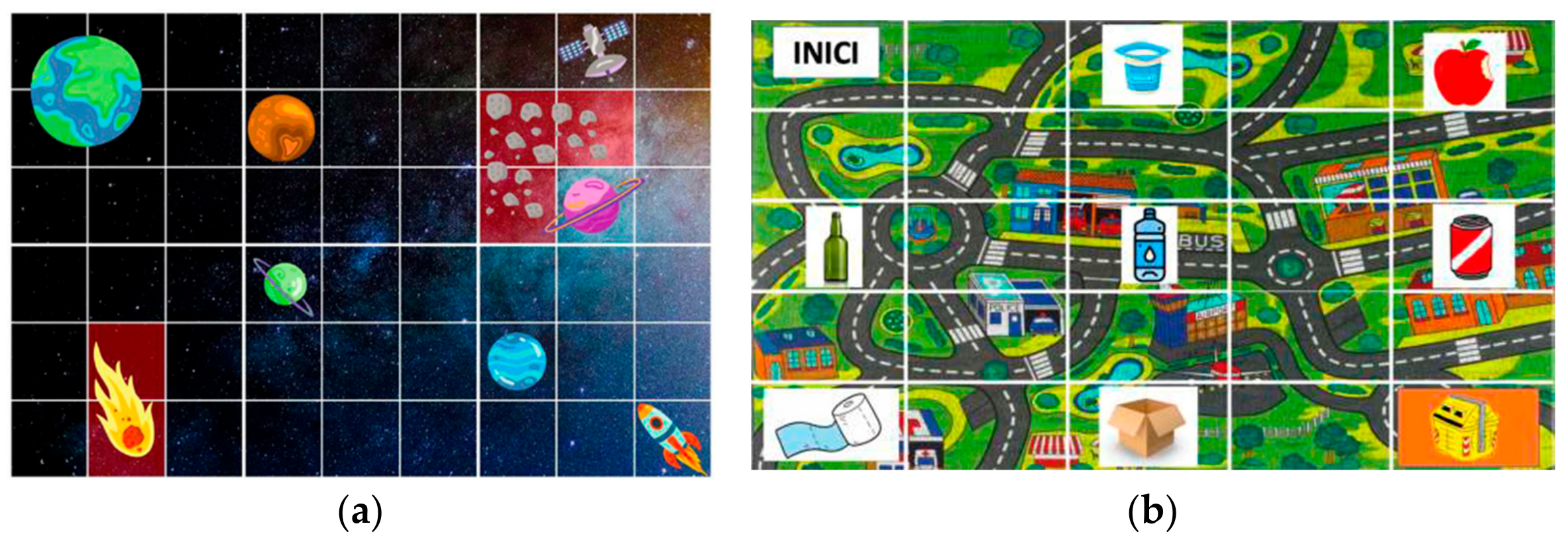
Although the carpets that exist in the market for the use of Blue-Bot or Bee-Bot type robots were not mentioned or used in the experience of session 1, almost two-thirds of the designs (11 of 17) propose the use of these carpets with different objectives, but always to limit the possible trajectories of the robot. Examples are given in
Figure 6a,b. We wonder if this may be due to the deep-rooted habit in students of consulting the Internet for inspiration and ideas when creating their designs.
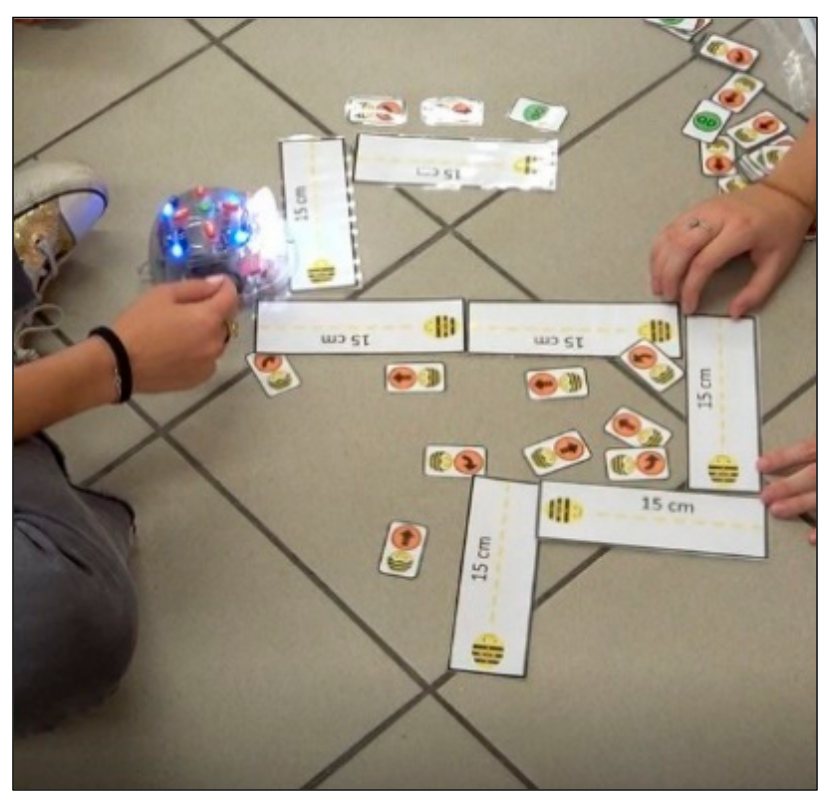
The participants in session 1, under the supervision of the teachers, practiced with the programming cards to represent their algorithms, before or after performing the keystrokes on the robot. They went from saying the algorithm orally while pressing the robot keys to representing the algorithm with the cards, progressively: placing them first following the shape of the desired route for the robot and then, with practice, horizontally (regardless of the shape of the route). They also compared different algorithms represented with the cards. The teachers emphasized the role of algorithm representation in institutionalizing concepts related to the development of CT. Thus, it is surprising that only three of the designs propose the use of the representation cards of the programming algorithm, and, of these three, the representation cards are part of the activity in one since the other two propose it as an optional use resource.
Other resources were incorporated in the designs: different cards with images of objects related to the theme of the context to be put on the carpet as obstacles or objectives for the robot; the 15 cm rectangle card; pen and paper; a children’s story and its main characters (Hansel and Gretel, for example); treasure map and treasure (chocolate coins); and lyrics of children’s songs, among others. All these material resources show an effort to contextualize the activity designed to favor the use of models and concrete visualizations for the programming of robot actions.
On the other hand, half of the designs (9 out of 17) make explicit the organization of the students during the activity, always in small groups during the development of the activity that requires the manipulation of the robot and with other moments of sharing in a large group to share ideas and reflect on the work done. One of the designs also states that half of the group would be worked on, which indicates a concern to be able to develop an educational practice with the best possible conditions in terms of the number of children to attend and the resources to put at their disposal:
This activity is designed to be carried out in the “Mathematics Environment” or the mathematics class, with the group split, that is, with 12–13 children (…) in groups of 4 children
(A8)
In the designs, great attention is paid to affective suitability, selecting tasks that arouse interest and motivation, as well as keeping students motivated. Of the 17 designs, 7 are based on an uncompetitive game, some with a “prize” (a “real” treasure composed of chocolate coins); 6 on a problem from an everyday context known to children (problem with the class fish tank, looking up words from a nursery rhyme, finding the key to the classroom cupboard, etc.); 2 on centers of interest (space and planets and pirates); and 2 on a children’s story and its characters. The problems posed challenge students to feel involved and motivated to participate in solving them. Some designs appeal to the empathy of the students with the characters of the stories or games so that they want to help them, and in others, a need is created to solve the problem cooperatively because it affects elements that belong to the group (the keys of the cupboard do not appear, the fish of their fish tank have been lost, the robot is running out of battery) In addition, in half of the designs (9 out of 17), it is explicit that the teacher will encourage students to formulate and test several hypotheses until the solution is found.
In the line of generating positive attitudes and feelings of participation in the task, two-thirds of the designs (12 out of 17) include scheduled moments of debate and reflection in a small group where it is expected that children intervene in inequality to contribute their ideas, argue different hypotheses or possible solutions and make comments that other students should actively listen to.
Children will also give their opinion on what improvements they would propose to solve the problem
(A8)
(…) and each student will be able to explain their hypothesis
(A9)
We will motivate children to continue to have an interest in learning and acquiring new knowledge
(B8)
Finally, regarding
ecological suitability, the evidence in the designs of the aspects related to the adaptation to the curriculum and the intra- and interdisciplinary connections have been analyzed. On the one hand, the contents that are treated, although, as mentioned above, they are not explicit in any of the designs, are framed in the guidelines of the current curriculum for the stage of early childhood education in Catalonia [
6] that incorporates explicitly, for the first time, the development of CT.
On the other hand, the core content is CT, and in most of the designs (13 out of 17), it is not explicitly expressed that the design relates to any other content. However, almost a quarter of the designs (4 out of 17) make it explicit that the activity is related to other content: two designs are related to other mathematical content (numerical thinking and spatial thinking); one design is explicitly related to the environment; and another is related to music.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}