
Study on Comprehensive Evaluation Based on AHP-MADM Model for Patent Value of Balanced Vehicle


Abstract
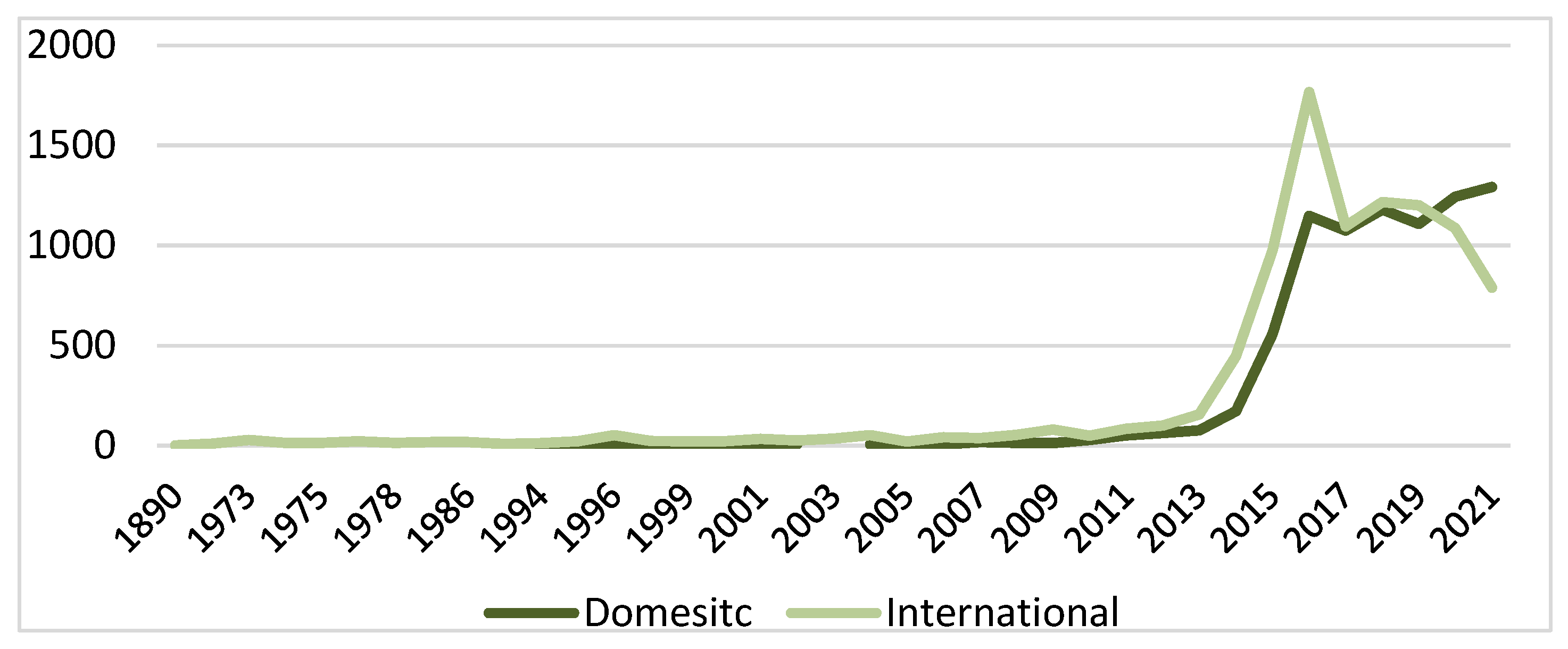
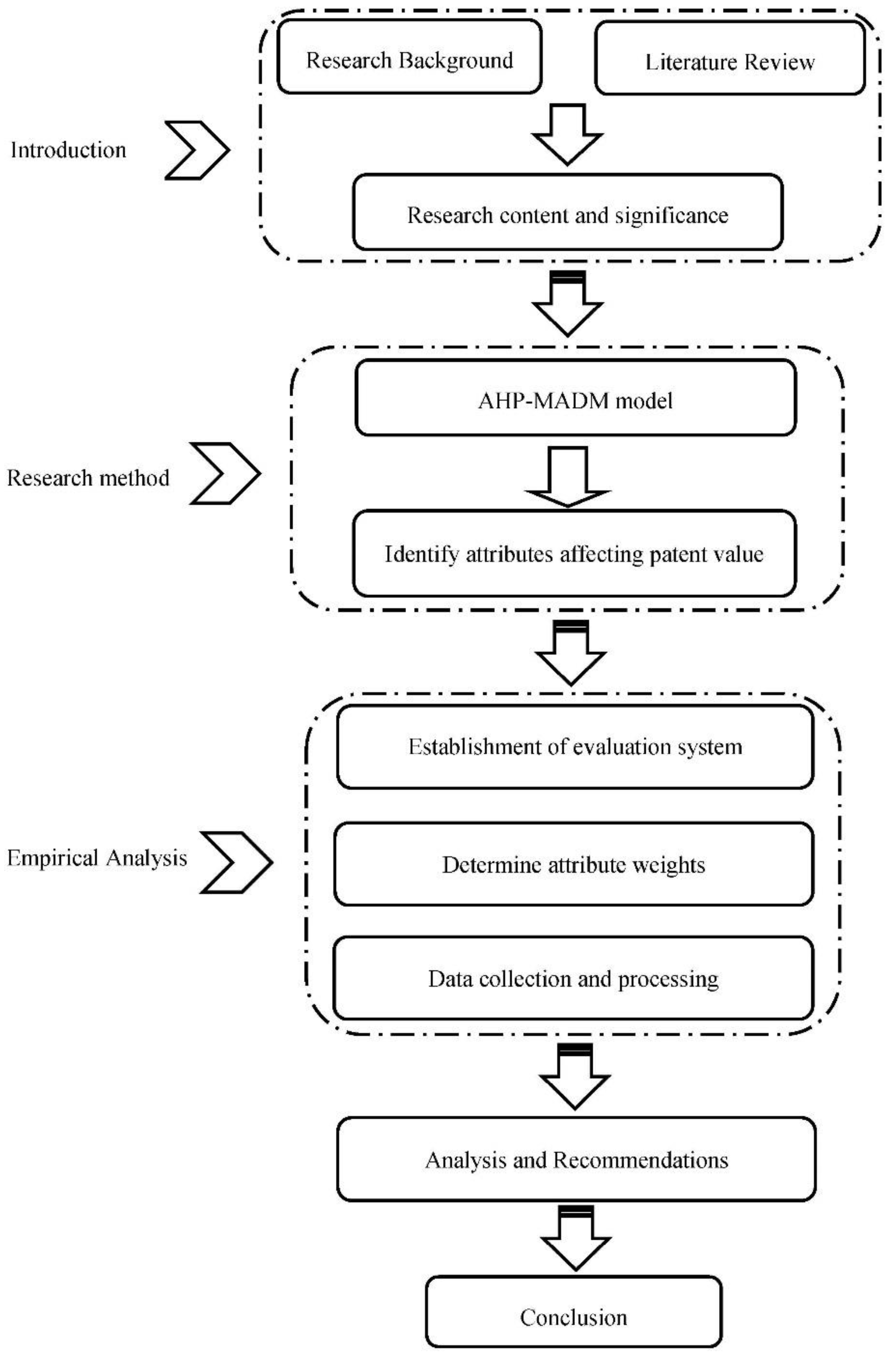
:1. Introduction
2. Research Methods
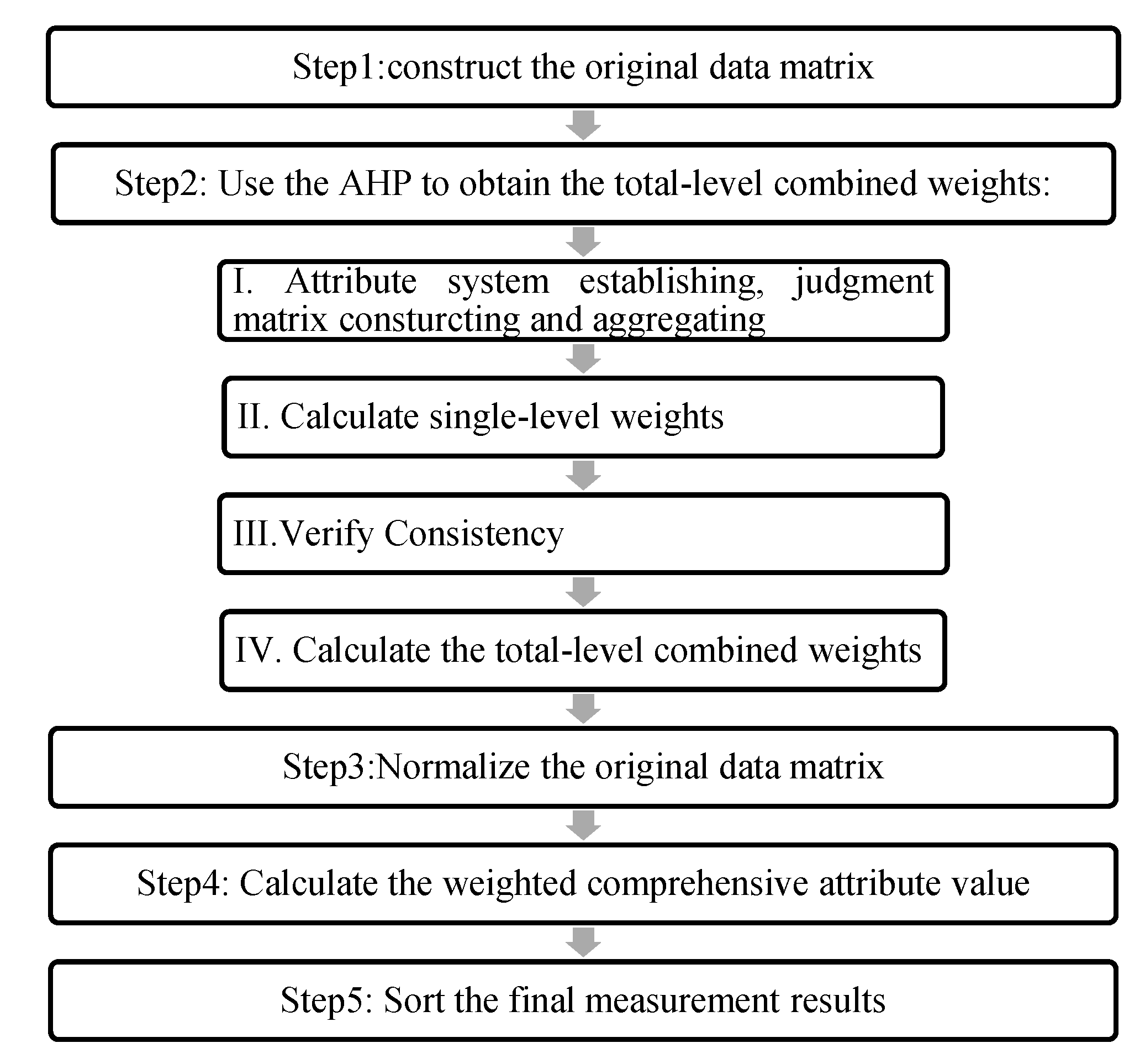
2.1. AHP-MADM Model
- I.
- Attribute system establishment, judgment matrix construction, and aggregation.
- II.
- Calculation of single-level weights
- i.
- The approximate eigenvectors are obtained by geometrically averaging the row vectors of the matrix, and the formula is as follows:
- ii.
- The approximate eigenvectors are normalized to obtain the weight of each attribute, and the formula is as follows:
- III.
- Verify Consistency
- i.
- According to the characteristic equation Ba = diag(λ1, λ2, …, λm)a and Formula (3), it is easy to calculate the maximum characteristic root , where ,, and use to calculate the consistency index (Consistent index, C.I.) as follows:
- ii.
- The error of judgment increases as the matrix order m increases, so the influence of m should be taken into account when judging the consistency. The literature [17] gives the test value of the average stochastic consistency index calculated by the 500 sample judgment matrix. Therefore, the average random consistency index shown in Table 5 is compared to find the corresponding average random index (Random index, R.I.).
- iii.
- Then, the average random consistency index is used to modify C.I., that is, the consistency of the unified aggregation judgment matrix is reflected by the random consistency ratio (Consistency ratio, C.R.) as follows:
- IV.
- Calculation of the total-level combined weights
2.2. Evaluation Attributes Affecting Patent Value
3. Empirical Analysis for Patent Value Evaluation of Self-Balancing Vehicles
3.1. Construction of a Patent Value Evaluation System for Self-Balancing Vehicles
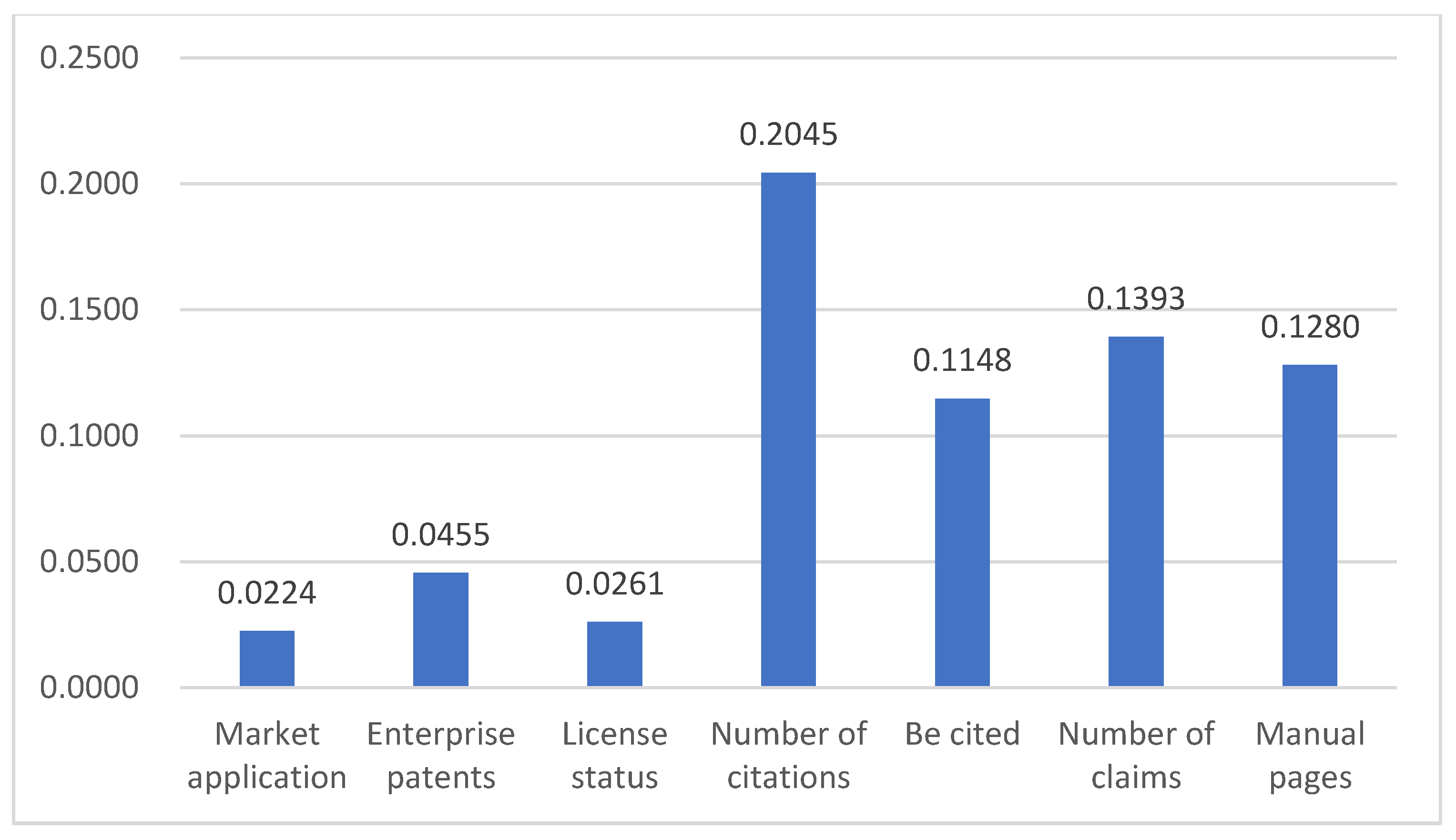
3.2. Determination of Attribute Weights Based on the AHP-MADM Model
3.3. Data Collection and Processing
3.3.1. Data Sources
3.3.2. Data Normalization
3.3.3. Measurement Results
4. Analysis and Recommendations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- 1.
- Your current status in the patent field belongs to which of the following:
- ☐
- University teacher
- ☐
- College Students
- ☐
- Patent examiners
- ☐
- Patent agency practitioners
- ☐
- Enterprise product R&D personnel
- ☐
- other
- 2.
- The name of the institution you belong to is:
- 3.
- Please fill in the following table according to the scoring instructions:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| B | Economic Value (u1) | Technical Value (u2) | Legal Value (u3) |
|---|---|---|---|
| Economic Value (u1) | 1 | ||
| Technical Value (u2) | 1 | ||
| Legal Value (u3) | 1 |
| C1 | Market Application (v1) | Enterprise Patents (v2) | Sales Ratio (v3) |
|---|---|---|---|
| Market application (v1) | 1 | ||
| Enterprise patents (v2) | 1 | ||
| Sales ratio (v3) | 1 |
| C2 | Number of Inventors (v4) | Number of Citations (v5) | Number of Classification Numbers (v6) | Be Cited (v7) | Number of Claims (v8) |
|---|---|---|---|---|---|
| Number of inventors (v4) | 1 | ||||
| Number of Citations (v5) | 1 | ||||
| Number of classification numbers (v6) | 1 | ||||
| Be cited (v7) | 1 | ||||
| Number of claims (v8) | 1 |
| C3 | Number of Siblings (v9) | Manual Pages (v10) | Survival Period (v11) | License Status (v12) |
|---|---|---|---|---|
| Number of siblings (v9) | 1 | |||
| Manual pages (v10) | 1 | |||
| Survival period (v11) | 1 | |||
| License status (v12) | 1 |
| Score | Definition |
|---|---|
| 1 | Two activities contribute equally to the objective. |
| 3 | Experience and judgment slightly favor one activity over another. |
| 5 | Experience and judgment strongly favor one activity over another. |
| 7 | An activity is strongly favored and its dominance is demonstrated in practice. |
| 9 | The evidence favoring one activity over another is of the highest possible order of affirmation. |
| 2, 4, 6, 8 | Intermediate values between the two adjacent judgements |
| Reciprocal | If an activity has one above number assigned to it when compared with a second activity, then the activity has the reciprocal when compare to the first. |
Appendix B
| Attribute | 2 Points | 4 Points | 6 Points | 8 Points | 10 Points |
|---|---|---|---|---|---|
| Market application | Not applied, difficult to apply | Not applied, easy to apply | Applied | ||
| Enterprise patents | Rare | Less | General | Many | More |
| Sales ratio | Very small | Small | General | Large | Very Large |
| Number of inventors | 1 | 2 | 3 | 4 | 5 people and above |
| Number of classification numbers | 1 | 2 | 3 | 4 | Category 5 and above |
| Number of Citations | 0–5 | 6–10 | 11–20 | 20–30 | 30 and above |
| Be cited | 0–10 | 11–20 | 21–30 | 31–40 | 40 and above |
| Number of claims | 1–10 | 11–20 | 21–30 | 31–40 | 40 and above |
| Number of siblings | Domestic only | 2–10 | 10 or more | ||
| Manual pages | 1–7 | 8–14 | 15–21 | 22–28 | 28 pages or more |
| Survival period | within 3 years | 4–7 years | 8–11 years | 12–15 years | 16+ years |
| License status | No license | Licensed |
| (1) | ||||||
| Application number and name | v1 | v2 | v3 | v4 | v5 | v6 |
| CN201510607441.2 Electric balance torsion car | 10 | 4 | 4 | 2 | 2 | 4 |
| CN201520864881.1 Electric balance car | 10 | 4 | 4 | 2 | 10 | 4 |
| CN201410262108.8 Electric balance torsion car | 2 | 6 | 4 | 4 | 4 | 2 |
| CN201510324294.8 An improved electric balance car | 6 | 6 | 4 | 2 | 4 | 2 |
| CN201510328631.0 Novel electric balance car | 6 | 6 | 4 | 2 | 2 | 8 |
| CN201810180450.1 Electric balance car and its supporting cover, starting method and turning method | 6 | 6 | 4 | 4 | 2 | 6 |
| CN201510324381.3 Electric balance car | 2 | 6 | 4 | 2 | 2 | 6 |
| CN201510324580.4 Electric balance car | 2 | 6 | 4 | 2 | 2 | 2 |
| CN201611222975.4 A human-machine interactive somatosensory vehicle and its control method and device | 2 | 6 | 4 | 4 | 4 | 4 |
| CN201410515643.X Wheel balance car | 2 | 4 | 8 | 6 | 2 | 2 |
| CN201210421265.X A dual-wheel self-balancing vehicle control system and dual-wheel self-balancing vehicle | 6 | 4 | 8 | 6 | 4 | 4 |
| CN200980151327.6 Device and method for dynamic self-balancing vehicle control | 2 | 2 | 8 | 8 | 2 | 8 |
| CN201180011306.1 Device and method for vehicle control | 2 | 2 | 8 | 8 | 2 | 8 |
| CN201710206692.9 A kind of balance car and its control method | 6 | 2 | 2 | 2 | 2 | 10 |
| CN201510627152.9 Control method and device of balance car | 2 | 3 | 8 | 6 | 2 | 2 |
| CN201510363955.8 Control method and device of balance car | 2 | 3 | 8 | 6 | 2 | 2 |
| CN201510626948.2 Control method and device of two-wheeled balance car | 2 | 3 | 8 | 6 | 2 | 2 |
| CN201510455016.6 Balance car parking method and device | 2 | 3 | 8 | 6 | 2 | 2 |
| CN201810180448.4 Electric balance car and its support cover, car body and rotating mechanism | 6 | 2 | 4 | 4 | 2 | 6 |
| CN201810005593.9 Human-machine interactive somatosensory vehicle and its supporting frame | 6 | 2 | 4 | 2 | 2 | 10 |
| (2) | ||||||
| Application number and name | v7 | v8 | v9 | v10 | v11 | v12 |
| CN201510607441.2 Electric balance torsion car | 4 | 2 | 10 | 4 | 4 | 4 |
| CN201520864881.1 Electric balance car | 2 | 2 | 2 | 4 | 2 | 4 |
| CN201410262108.8 Electric balance torsion car | 10 | 2 | 10 | 2 | 6 | 4 |
| CN201510324294.8 An improved electric balance car | 4 | 2 | 10 | 6 | 4 | 8 |
| CN201510328631.0 Novel electric balance car | 4 | 2 | 10 | 4 | 4 | 8 |
| CN201810180450.1 Electric balance car and its supporting cover, starting method and turning method | 2 | 6 | 10 | 6 | 6 | 8 |
| CN201510324381.3 Electric balance car | 4 | 2 | 10 | 6 | 4 | 4 |
| CN201510324580.4 Electric balance car | 2 | 2 | 10 | 6 | 4 | 4 |
| CN201611222975.4 A human-machine interactive somatosensory vehicle and its control method and device | 2 | 6 | 10 | 6 | 4 | 4 |
| CN201410515643.X Wheel balance car | 2 | 2 | 6 | 4 | 6 | 8 |
| CN201210421265.X A dual-wheel self-balancing vehicle control system and dual-wheel self-balancing vehicle | 4 | 2 | 2 | 6 | 6 | 8 |
| CN200980151327.6 Device and method for dynamic self-balancing vehicle control | 4 | 10 | 6 | 10 | 8 | 4 |
| CN201180011306.1 Device and method for vehicle control | 2 | 10 | 10 | 10 | 8 | 4 |
| CN201710206692.9 A kind of balance car and its control method | 2 | 4 | 4 | 4 | 4 | 8 |
| CN201510627152.9 Control method and device of balance car | 6 | 4 | 4 | 8 | 4 | 4 |
| CN201510363955.8 Control method and device of balance car | 4 | 6 | 4 | 10 | 4 | 4 |
| CN201510626948.2 Control method and device of two-wheeled balance car | 4 | 4 | 4 | 8 | 4 | 4 |
| CN201510455016.6 Balance car parking method and device | 2 | 2 | 4 | 4 | 4 | 4 |
| CN201810180448.4 Electric balance car and its support cover, car body and rotating mechanism | 2 | 6 | 10 | 6 | 6 | 8 |
| CN201810005593.9 Human-machine interactive somatosensory vehicle and its supporting frame | 2 | 4 | 10 | 10 | 4 | 8 |
References
- Liang, W.Y.; Zhou, H.X.; Cao, R.M.; Zhao, K.; Jiang, L.B.; Wen, H.Q. Summary of Dual-wheel Self-balancing Transporters. Control. Eng. China 2010, 17, 139–144+190. [Google Scholar]
- Vos, D.W.; Flotow, A.H.V. Dynamics and Nonlinear, Adaptive Control of an Autonomous Unicycle: Theory and Experiment. In Proceedings of the 29th IEEE Conference on Decision & Control, Honolulu, HI, USA, 5–7 December 1990. [Google Scholar]
- Dongguan Securities. Analysis on the Development Status of the Smart Electric Balance Vehicle Industry in 2022. Available online: https://www.163.com/dy/article/H80SKD870518WMF4.html (accessed on 23 May 2022).
- Brockhoff, K. Instruments for Patent Data Analysis in Business Firms. Technovation 1992, 12, 451–458. [Google Scholar]
- Li, Q.H.; Liu, Y.; Wu, S.Z.; Xiao, X.B. Patent Value Indicators and Their Structure. Studeis Sci. Sci. 2007, 25, 281–286. [Google Scholar]
- Scherer, F.M.; Harhoff, D. Technology Policy for a World of Skew-distributed Outcomes. Res. Policy 2004, 29, 559. [Google Scholar]
- Ma, H.M.; Wang, M.T.; Ye, C.M. Introduction to the Comprehensive Evaluation Index System of Intellectual Property Rights in Japan and the United States. Mark. Mod. 2007, 31, 301–302. [Google Scholar]
- Park, Y.; Park, G. A New Method for Technology Valuation in Monetary Value: Procedure and Application. Technovation 2004, 24, 387–394. [Google Scholar]
- Lv, X.R. Empirical Research on Patent Value Evaluation Index System and Patent Technology Quality Evaluation. Sci. Technol. Prog. Policy 2014, 31, 113–116. [Google Scholar]
- Wan, X.L.; Zhu, X.Z. The Indicator System and Fuzzy Comprehensive Evaluation of Patent Value. Sci. Res. Manag. 2008, 2, 185–191. [Google Scholar]
- Xu, H.B.Q.C. Research on the Status and Trend of Patent Value Evaluation. J. Mod. Inf. 2014, 34, 75–79. [Google Scholar]
- Jin, X.D. Analysis of Influencing Factors of Patent Value in Patent Asset Securitization. J. Commer. Econ. 2011, 24, 66. [Google Scholar]
- Li, Z.Y.; Meng, F.S.; Cao, X. The Evaluation Method Research of Patent Value Based on the Four Factors. J. Intell. 2010, 29, 87–90. [Google Scholar]
- Li, Z.P.; Xia, Y.Q. Evaluation of patent pledge financing value based on triangular fuzzy number analytic hierarchy process. Financ. Account. Mon. 2016, 15, 63–66. [Google Scholar]
- Zhang, Y.Q.; Zhang, W.D. Empirical Study on the Quantitative Evaluation Model of the Patents Value of Enterprise. J. Intell. 2010, 29, 51–54. [Google Scholar]
- Yuan, Z.M.; Li, H.Y.; Wang, H.; Sun, H.L. Evaluation of Intellectual Property Pledge Financing: A Study on Profit Allocation Rate. Stud. Sci. Sci. 2012, 30, 840, 856–864. [Google Scholar]
- Saaty, T.L. How to make a decision: The analytic hierarchy process. European. J. Oper. Res. 1990, 48, 9–26. [Google Scholar]
- Piya, S.; Shamsuzzoha, A.; Azizuddin, M.; Al-Hinai, N.; Erdebilli, B. Integrated Fuzzy AHP-TOPSIS Method to Analyze Green Management Practice in Hospitality Industry in the Sultanate of Oman. Sustainability 2022, 14, 1118. [Google Scholar]
- Ecer, B.; Aktas, A.; Kabak, M. AHP—Binary linear programming approach for multiple criteria real estate investment planning. J. Turk. Oper. Manag. 2019, 3, 283–289. [Google Scholar]
- Rouyendegh, B.D.; Oztekin, A.; Ekong, J.; Dag, A. Measuring the efficiency of hospitals: A fully-ranking DEA–FAHP approach. Ann. Oper. Res. 2016, 278, 361–378. [Google Scholar]
- Deng, Y.H.; Wu, G.S. A Summary of Several Measurement Methods for Technological Innovation Activities. Sci. Technol. Prog. Countermeas. 2002, 19, 66–67. [Google Scholar]
- Arunachalam, R.; Piya, S.; Krishnan, P.K.; Muraliraja, R.; Christy, J.V.; Mourad, A.H.I.; Al-Maharbi, M. Optimization of stir–squeeze casting parameters for production of metal matrix composites using a hybrid analytical hierarchy process–Taguchi-Grey approach. Eng. Optim. 2020, 52, 1166–1183. [Google Scholar]
- Xui, Z.S. Uncertain Multiple Attribute Decision Making Methods and Applications; Tsinghua University Press: Beijing, China, 2004. [Google Scholar]
- Luo, L.G.; Zhao, Z.H.; Luo, L.Z. Theory and Empirical Research on Core Patent Identification indicators. China Invent. Pat. 2020, 17, 100–105. [Google Scholar]
- National Intellectual Property Operation Public Service Platform. High-Value Patent Cultivation and Evaluation Standards officially released. Available online: https://www.cnipa.gov.cn/ (accessed on 20 April 2022).
- Yang, T.J. Patent Analysis Practice Manual; Intellectual Property Press: Beijing, China, 2012; pp. 45–98. [Google Scholar]
- Luan, C.J.; Wang, X.K.; Liu, Z.Y. Methods of Affirming Core Technology Via Derwent Innovations Index. Sci. Sci. Manag. S. T. 2008, 6, 32–34. [Google Scholar]
- Meng, Y.; Niu, Y.Y. RFID analysis of Correlation Technical Monopoly (II). Radio Freq. Identif. Technol. Appl. 2006, 6, 49–53. [Google Scholar]
- Luan, C.J. Patentometrics and Studies on Developing Medol of Patent-A Case Study of Digital Information Transmission Technology; Dalian University of Technology: Dalian, China, 2008. [Google Scholar]
- Lanjouw, J.O.; Schankennan, M. Patent Quality and Research Productivity: Measuring Innovation with Multiple Indicators. Econ. J. 2004, 114, 441–465. [Google Scholar]
- Sun, T.T.; Tu, X.L.; Li, Y. Method and Application of Core Patents Identification. Libr. Inf. Serv. 2012, 56, 80–84. [Google Scholar]
- Xiao, H.W.; Gu, Z.Y. Patent Map Method and Application; Shanghai Jiaotong University Press: Shanghai, China, 2011; pp. 148–150. [Google Scholar]
- Ma, Y.T.; Zhang, X.; Fu, J.Y.; Zhao, Y.H. Summary of Core Patent and Its Identification Methods. J. Intell. 2014, 33, 38–43+70. [Google Scholar]
- Yang, X.C.; Yang, W.C.; Liu, F. Current Situation and Thinking of High-value Patent Cultivation System. Technol. Innov. Appl. 2019, 24, 15–16. [Google Scholar]







| Type | Invention | Utility Model | Design |
|---|---|---|---|
| Domestic patent | 2334 | 3248 | 2741 |
| Foreign patent | 1474 | 66 | 1 |
| World patent | 3808 | 3314 | 2742 |
| Scaling | Definition |
|---|---|
| 1 | Two activities contribute equally to the objective. |
| 3 | Experience and judgment slightly favor one activity over another. |
| 5 | Experience and judgment strongly favor one activity over another. |
| 7 | An activity is strongly favored, and its dominance is demonstrated in practice. |
| 9 | The evidence favoring one activity over another is of the highest possible order of affirmation. |
| 2, 4, 6, 8 | Intermediate values between the two adjacent judgements. |
| Reciprocal | If an activity has one above number assigned to it when compared with a second activity, then the activity has the reciprocal when compared to the first. |
| Matrix Order | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R.I. | 0 | 0 | 0.52 | 0.89 | 1.12 | 1.26 | 1.36 | 1.41 | 1.46 | 1.49 | 1.52 | 1.54 |
| First-Level Indicator A | Second-Level Indicator B | Second-Level Code | Third-Level Indicator C | Three-Level Code |
|---|---|---|---|---|
| Patent Value | Economic Value | u1 | Market application | v1 |
| Enterprise patents | v2 | |||
| Sales ratio | v3 | |||
| Technical Value | u2 | Number of inventors | v4 | |
| Number of citations | v5 | |||
| Number of classification numbers | v6 | |||
| Be cited | v7 | |||
| Number of claims | v8 | |||
| Legal Value | u3 | Number of siblings | v9 | |
| Manual pages | v10 | |||
| Survival period | v11 | |||
| License status | v12 |
| B | u1 | u2 | u3 | Second-Level Weight of Indicator Criteria | |||||
|---|---|---|---|---|---|---|---|---|---|
| E1 | E2 | E3 | E4 | E5 | E6 | ||||
| u1 | 1 | 1/4, 1/3, 1/5, 1/3, 1/4, 1/2 | 1/2, 1/3, 1/4, 1/2, 1/2, 1 | 0.1429 | 0.1634 | 0.0936 | 0.1634 | 0.1429 | 0.2402 |
| u2 | 4, 3, 5, 3, 4, 2 | 1 | 2, 2, 3, 2, 2, 3 | 0.5714 | 0.5396 | 0.6267 | 0.5396 | 0.5714 | 0.5499 |
| u3 | 2, 3, 4, 2, 2, 1 | 1/2, 1/2, 1/3, 1/2, 1/2, 1/3 | 1 | 0.2857 | 0.2970 | 0.2797 | 0.2970 | 0.2857 | 0.2098 |
| Consistency ratio (C.R.) | 0 | 0.01 | 0.08 | 0.01 | 0 | 0.02 | |||
| C1 | v1 | v2 | v3 | Third-Level Weight of Indicator Criteria | |||||
|---|---|---|---|---|---|---|---|---|---|
| E1 | E2 | E3 | E4 | E5 | E6 | ||||
| v1 | 1 | 1/2, 1/3, 1/2, 1/2, 1/2, 1/2 | 1/3, 1/4, 1/3, 1/2, 1/2, 1/4 | 0.1667 | 0.1220 | 0.1375 | 0.1958 | 0.1958 | 0.1429 |
| v2 | 2, 3, 2, 2, 2, 2 | 1 | 1, 1/2, 1/2, 1/2, 1/2, 1/2 | 0.3885 | 0.3196 | 0.3333 | 0.3108 | 0.3108 | 0.2857 |
| v3 | 3, 4, 3, 2, 2, 4 | 1, 2, 2, 2, 2, 2 | 1 | 0.4448 | 0.5584 | 0.5292 | 0.4934 | 0.4934 | 0.5714 |
| Consistency ratio (C.R.) | 0.0079 | 0.0176 | 0.0226 | 0.0516 | 0.0516 | 0 | |||
| C2 | v4 | v5 | v6 | v7 | v8 | Third-Level Weight of Indicator Criteria | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| E1 | E2 | E3 | E4 | E5 | E6 | ||||||
| v4 | 1 | 1/4, 1/4, 1/3, 1/3,1/5, 1/3 | 2, 2, 1, 1, 1/4, 2 | 1/2, 1/2, 1/2, 1, 1/4, 1/3 | 1/2, 1/3, 1/2, 1/2, 1/7, 1/2 | 0.1053 | 0.0926 | 0.1157 | 0.1240 | 0.0478 | 0.1038 |
| v5 | 4, 4, 3, 3, 5, 3 | 1 | 8, 8, 3, 3, 1, 6 | 2, 2, 1, 3, 1, 1 | 2, 3, 1, 2, 1, 2 | 0.4211 | 0.4358 | 0.2950 | 0.3940 | 0.2336 | 0.3297 |
| v6 | 1/2, 1/2, 1, 1, 4, 1/2 | 1/8, 1/8, 1/3, 1/3, 1, 1/6 | 1 | 1/4, 1/4, 3, 1, 1, 1/6 | 1/4, 1/6, 1, 1/2, 1/2, 1/4 | 0.0526 | 0.0463 | 0.1526 | 0.1240 | 0.1945 | 0.0519 |
| v7 | 2, 2, 2, 1, 4, 3 | 1/2, 1/2, 1, 1/3, 1, 1 | 4, 4, 1/3, 1, 1, 6 | 1 | 1, 1/2, 1, 1/2, 1/2, 2 | 0.2105 | 0.1749 | 0.2184 | 0.1240 | 0.1945 | 0.3297 |
| v8 | 2, 3, 2, 2, 7, 2 | 1/2, 1/3, 1, 1/2, 1, 1/2 | 4, 6, 1, 2, 2, 4 | 1, 2, 1, 2, 2, 1/2 | 1 | 0.2105 | 0.2503 | 0.2184 | 0.2341 | 0.3297 | 0.1850 |
| Consistency ratio (C.R.) | 0 | 0.0505 | 0.0590 | 0.0046 | 0.0220 | 0.0059 | |||||
| C3 | v9 | v10 | v11 | v12 | Third-Level Weight of Indicator Criteria | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| E1 | E2 | E3 | E4 | E5 | E6 | |||||
| v9 | 1 | 1/2, 1/3, 1/2, 1/2, 1/3, 1/2 | 1, 1, 1/2, 1, 1, 1 | 3, 2, 2, 3, 4, 3 | 0.2341 | 0.1935 | 0.1899 | 0.2428 | 0.2202 | 0.2341 |
| v10 | 2, 3, 2, 2, 3, 2 | 1 | 3, 3, 2, 2, 2, 3 | 4, 3, 3, 4, 5, 4 | 0.4681 | 0.4883 | 0.4203 | 0.4387 | 0.4795 | 0.4681 |
| v11 | 1, 1, 2, 1, 1, 1 | 1/3, 1/3, 1/2, 1/2, 1/2, 1/3 | 1 | 3, 3, 2, 2, 3, 3 | 0.2115 | 0.2142 | 0.2685 | 0.2194 | 0.2267 | 0.2115 |
| v12 | 1/3, 1/2, 1/2, 1/3, 1/4, 1/3 | 1/4, 1/3, 1/3, 1/4, 1/5, 1/4 | 1/3, 1/3, 1/2, 1/2, 1/3, 1/3 | 1 | 0.0863 | 0.1040 | 0.1213 | 0.0991 | 0.0736 | 0.0863 |
| Consistency ratio (C.R.) | 0.0349 | 0.0683 | 0.0376 | 0.0120 | 0.0350 | 0.0349 | ||||
| Second-Level Indicators B | Second-Level Indicator Weight | Third-Level Indicator C | Third-Level Indicator Weight | Total-Level Weight |
|---|---|---|---|---|
| Economic Value | 0.1493 | Market application | 0.1503 | 0.0224 |
| Enterprise patents | 0.3050 | 0.0455 | ||
| Sales ratio | 0.5448 | 0.0813 | ||
| technical value | 0.5689 | Number of inventors | 0.0984 | 0.0560 |
| Number of citations | 0.3594 | 0.2045 | ||
| Number of classification numbers | 0.0955 | 0.0544 | ||
| Be cited | 0.2017 | 0.1148 | ||
| Number of claims | 0.2449 | 0.1393 | ||
| legal value | 0.2818 | Number of siblings | 0.2283 | 0.0643 |
| Manual pages | 0.4544 | 0.1280 | ||
| Survival period | 0.2245 | 0.0633 | ||
| License status | 0.0928 | 0.0261 |
| Patents | v1 | v2 | v3 | v4 | v5 | v6 | v7 | v8 | v9 | v10 | v11 | v12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CN201510607441.2 Electric balance torsion car | transfer | 56 | 1.80% | 1 | 0 | 2 | 12 | 9 | 61 | 9 | 7 | |
| CN201520864881.1 Electric balance car | transfer | 56 | 1.80% | 1 | 0 | 2 | 0 | 10 | 0 | 9 | 0 | |
| CN201410262108.8 Electric balance torsion car | 143 | 2.50% | 2 | 36 | 1 | 81 | 10 | 61 | 6 | 8 | ||
| CN201510324294.8 An improved electric balance car | transfer | 143 | 2.50% | 1 | 9 | 1 | 16 | 10 | 74 | 17 | 7 | transfer |
| CN201510328631.0 New electric balance car | transfer | 143 | 2.50% | 1 | 10 | 4 | 12 | 9 | 74 | 9 | 6 | transfer |
| CN201810180450.1 Electric balance car and its supporting cover, starting method and turning method | transfer | 143 | 2.50% | 2 | 0 | 3 | 3 | 29 | 74 | 20 | 8 | transfer |
| CN201510324381.3 Electric balance car | 143 | 2.50% | 1 | 3 | 3 | 12 | 10 | 61 | 15 | 7 | ||
| CN201510324580.4 Electric balance car | 143 | 2.50% | 1 | 2 | 1 | 9 | 9 | 73 | 16 | 6 | ||
| CN201611222975.4 A human-machine interactive somatosensory vehicle and its control method and device | 143 | 2.50% | 2 | 1 | 2 | 5 | 23 | 65 | 20 | 6 | ||
| CN201210421265.X A dual-wheel self-balancing vehicle control system and dual-wheel self-balancing vehicle | transfer | 32 | 8.60% | 3 | 2 | 2 | 16 | 10 | 1 | 19 | 10 | transfer |
| CN200980151327.6 Apparatus and method for control of a dynamically self-balancing vehicle | 6 | 8.60% | 4 | 8 | 10 | 14 | 69 | 10 | 59 | 13 | ||
| CN201180011306.1 Apparatus and method for vehicle control | 6 | 8.60% | 4 | 5 | 4 | 6 | 46 | 21 | 40 | 12 | ||
| CN201810005593.9 Human-computer interaction somatosensory vehicle and its supporting frame | 17 | 0.01% | 1 | 0 | 1 | 0 | 10 | 0 | 8 | 7 | ||
| CN201710206692.9 A kind of balance car and its control method | transfer | 2 | 0.03% | 1 | 0 | 6 | 4 | 13 | 4 | 12 | 5 | transfer |
| CN201510627152.9 Control method and device for balance car | 27 | 8.60% | 3 | 3 | 1 | 24 | 15 | 8 | 23 | 7 | ||
| CN201510363955.8 Control method and device for balance car | 27 | 8.60% | 3 | 3 | 1 | 12 | 27 | 8 | 35 | 5 | ||
| CN201510626948.2 Control method and device for two-wheeled balance car | 27 | 8.60% | 3 | 2 | 1 | 14 | 13 | 8 | 22 | 7 | ||
| CN201810180448.4-Electric balance car and its supporting cover, body and rotating mechanism | transfer | 15 | 2.50% | 2 | 0 | 3 | 0 | 25 | 73 | 19 | 8 | transfer |
| CN201810005593.9 Human-computer interaction somatosensory vehicle and its supporting frame | transfer | 15 | 2.50% | 2 | 1 | 5 | 2 | 15 | 65 | 39 | 5 | transfer |
| CN201810005593.9 Human-computer interaction somatosensory vehicle and its supporting frame | application | 15 | 2.50% | 2 | 1 | 5 | 2 | 15 | 65 | 39 | 5 | transfer |
| (1) | ||||||
| Application Number and Name | v1 | v2 | v3 | v4 | v5 | v6 |
| CN201510607441.2 Electric balance torsion car | 0.75 | 0.25 | 0.25 | 0.00 | 0.00 | 0.25 |
| CN201520864881.1 Electric balance car | 1.00 | 0.25 | 0.25 | 0.00 | 0.00 | 0.25 |
| CN201410262108.8 Electric balance torsion car | 0.00 | 0.50 | 0.25 | 0.25 | 1.00 | 0.00 |
| CN201510324294.8 An improved electric balance car | 0.50 | 0.50 | 0.25 | 0.00 | 0.25 | 0.00 |
| CN201510328631.0 New electric balance car | 0.50 | 0.50 | 0.25 | 0.00 | 0.25 | 0.75 |
| CN201810180450.1 Electric balance car and its supporting cover, starting method and turning method | 0.50 | 0.50 | 0.25 | 0.25 | 0.00 | 0.50 |
| CN201510324381.3 Electric balance car | 0.00 | 0.50 | 0.25 | 0.00 | 0.00 | 0.50 |
| CN201510324580.4 Electric balance car | 0.00 | 0.50 | 0.25 | 0.00 | 0.00 | 0.00 |
| CN201611222975.4 A human-machine interactive somatosensory vehicle and its control method and device | 0.00 | 0.50 | 0.25 | 0.25 | 0.00 | 0.25 |
| CN201410515643.X Unicycle balance car | 0.00 | 0.33 | 0.75 | 0.50 | 0.25 | 0.00 |
| CN201210421265.X A dual-wheel self-balancing vehicle control system and dual-wheel self-balancing vehicle | 0.67 | 0.33 | 0.75 | 0.50 | 0.00 | 0.25 |
| CN200980151327.6 Apparatus and method for control of a dynamically self-balancing vehicle | 0.00 | 0.00 | 0.75 | 0.75 | 0.25 | 0.75 |
| CN201180011306.1 Apparatus and method for vehicle control | 0.00 | 0.00 | 0.75 | 0.75 | 0.00 | 0.75 |
| CN201710206692.9 A kind of balance car and its control method | 0.50 | 0.00 | 0.00 | 0.00 | 0.00 | 1.00 |
| CN201510627152.9 Control method and device for balance car | 0.00 | 0.17 | 0.75 | 0.50 | 0.00 | 0.00 |
| CN201510363955.8 Control method and device for balance car | 0.00 | 0.13 | 0.75 | 0.50 | 0.00 | 0.00 |
| CN201510626948.2 Control method and device for two-wheeled balance car | 0.00 | 0.17 | 0.75 | 0.50 | 0.00 | 0.00 |
| CN201510455016.6 Balance car parking method and device | 0.00 | 0.17 | 0.75 | 0.50 | 0.00 | 0.00 |
| CN201810180448.4 Electric balance car and its supporting cover, body, and rotating mechanism | 0.50 | 0.00 | 0.25 | 0.25 | 0.00 | 0.50 |
| CN201810005593.9 Human–computer interaction somatosensory vehicle and its supporting frame | 0.50 | 0.00 | 0.25 | 0.25 | 0.00 | 1.00 |
| (2) | ||||||
| Application Number and Name | v7 | v8 | v9 | v10 | v11 | v12 |
| CN201510607441.2 Electric balance torsion car | 0.25 | 0.00 | 1.00 | 0.25 | 0.25 | 0.25 |
| CN201520864881.1 Electric balance car | 0.00 | 0.00 | 0.00 | 0.25 | 0.00 | 0.25 |
| CN201410262108.8 Electric balance torsion car | 1.00 | 0.00 | 1.00 | 0.00 | 0.50 | 0.25 |
| CN201510324294.8 An improved electric balance car | 0.25 | 0.00 | 1.00 | 0.50 | 0.25 | 0.75 |
| CN201510328631.0 New electric balance car | 0.25 | 0.00 | 1.00 | 0.25 | 0.25 | 0.75 |
| CN201810180450.1 Electric balance car and its supporting cover, starting method and turning method | 0.00 | 0.50 | 1.00 | 0.50 | 0.50 | 0.75 |
| CN201510324381.3 Electric balance car | 0.25 | 0.00 | 1.00 | 0.50 | 0.25 | 0.25 |
| CN201510324580.4 Electric balance car | 0.00 | 0.00 | 1.00 | 0.50 | 0.25 | 0.25 |
| CN201611222975.4 A human-machine interactive somatosensory vehicle and its control method and device | 0.00 | 0.50 | 1.00 | 0.50 | 0.25 | 0.25 |
| CN201410515643.X Unicycle balance car | 0.00 | 0.00 | 0.50 | 0.25 | 0.50 | 0.75 |
| CN201210421265.X A dual-wheel self-balancing vehicle control system and dual-wheel self-balancing vehicle | 0.25 | 0.00 | 0.00 | 0.50 | 0.50 | 0.75 |
| CN200980151327.6 Apparatus and method for control of a dynamically self-balancing vehicle | 0.25 | 1.00 | 0.50 | 1.00 | 0.75 | 0.25 |
| CN201180011306.1 Apparatus and method for vehicle control | 0.00 | 1.00 | 1.00 | 1.00 | 0.75 | 0.25 |
| CN201710206692.9 A kind of balance car and its control method | 0.00 | 0.25 | 0.25 | 0.25 | 0.25 | 0.75 |
| CN201510627152.9 Control method and device for balance car | 0.50 | 0.25 | 0.25 | 0.75 | 0.25 | 0.25 |
| CN201510363955.8 Control method and device for balance car | 0.25 | 0.50 | 0.25 | 1.00 | 0.25 | 0.25 |
| CN201510626948.2 Control method and device for two-wheeled balance car | 0.25 | 0.25 | 0.25 | 0.75 | 0.25 | 0.25 |
| CN201510455016.6 Balance car parking method and device | 0.00 | 0.00 | 0.25 | 0.25 | 0.25 | 0.25 |
| CN201810180448.4 Electric balance car and its supporting cover, body, and rotating mechanism | 0.00 | 0.50 | 1.00 | 0.50 | 0.50 | 0.75 |
| CN201810005593.9 Human–computer interaction somatosensory vehicle and its supporting frame | 0.00 | 0.25 | 1.00 | 1.00 | 0.25 | 0.75 |
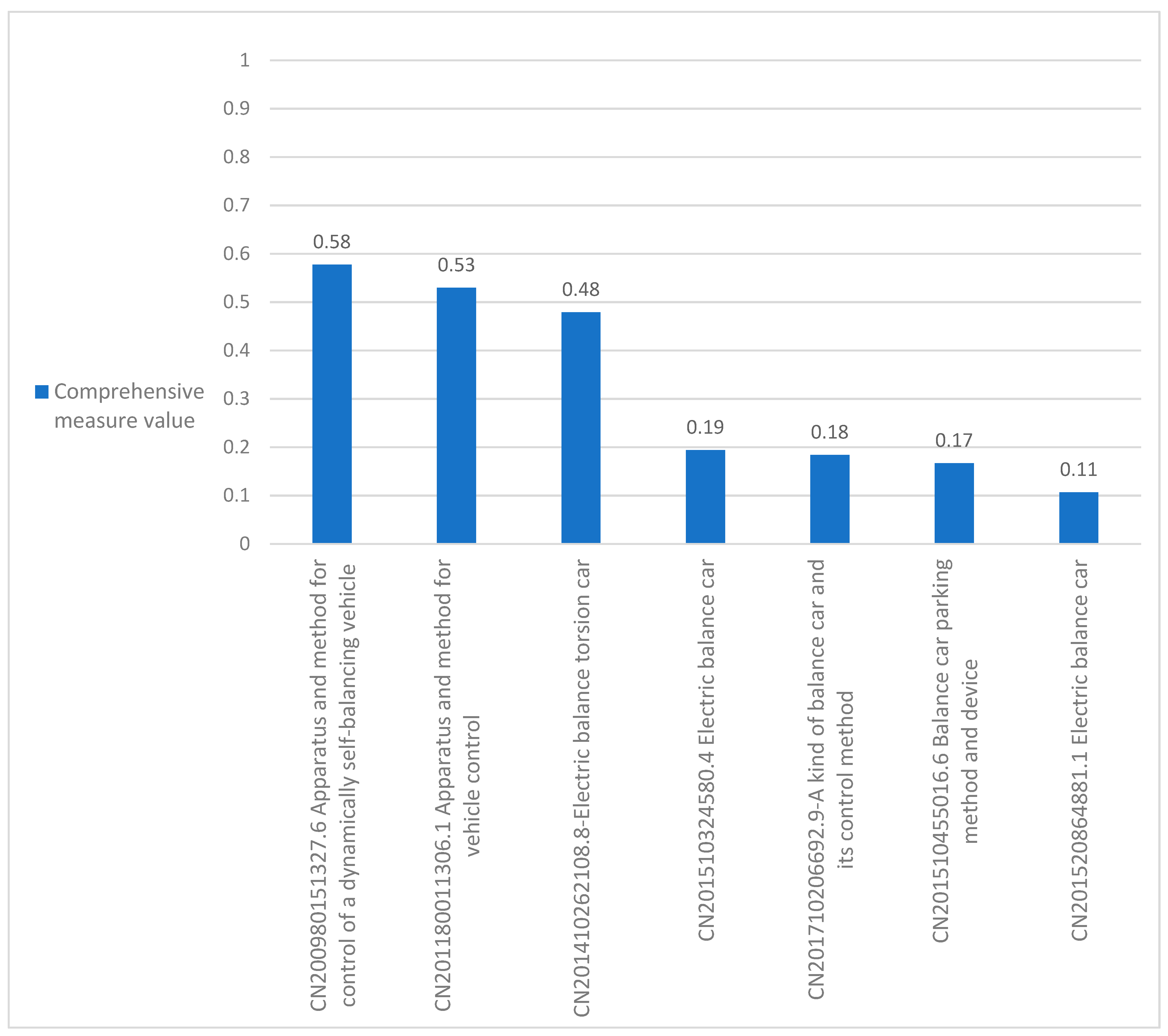
| Sort | Patent | Measure Result | Gradient |
|---|---|---|---|
| 1 | CN200980151327.6 Device and method for dynamic self-balancing vehicle control | 0.5771 | 1 |
| 2 | CN201180011306.1 Device and method for vehicle control | 0.5294 | |
| 3 | CN201410262108.8 Electric balance torsion car | 0.4788 | |
| 4 | CN201810005593.9 Human-machine interactive somatosensory vehicle and its supporting frame | 0.3625 | 2 |
| 5 | CN201510363955.8 Control method and device of balance car | 0.3595 | |
| 6 | CN201810180450.1 Electric balance car and its supporting cover, starting method and turning method | 0.3447 | |
| 7 | CN201510627152.9 Control method and device of balance car | 0.3233 | |
| 8 | CN201810180448.4 Electric balance car and its support cover, car body and rotating mechanism | 0.3220 | |
| 9 | CN201510328631.0 Novel electric balance car | 0.3067 | |
| 10 | CN201510324294.8 An improved electric balance car | 0.2979 | 3 |
| 11 | CN201510626948.2 Control method and device of two-wheeled balance car | 0.2946 | |
| 12 | CN201611222975.4 A human-machine interactive somatosensory vehicle and its control method and device | 0.2911 | |
| 13 | CN201210421265.X A dual-wheel self-balancing vehicle control system and dual-wheel self-balancing vehicle | 0.2767 | |
| 14 | CN201410515643.X Wheel balance car | 0.2707 | |
| 15 | CN201510324381.3 Electric balance car | 0.2497 | |
| 16 | CN201510607441.2 Electric balance torsion car | 0.2095 | |
| 17 | CN201510324580.4 Electric balance car | 0.1938 | 4 |
| 18 | CN201710206692.9 A kind of balance car and its control method | 0.1839 | |
| 19 | CN201510455016.6 Balance car parking method and device | 0.1670 | |
| 20 | CN201520864881.1 Electric balance car | 0.1063 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Li, J.; Yue, H. Study on Comprehensive Evaluation Based on AHP-MADM Model for Patent Value of Balanced Vehicle. Axioms 2022, 11, 481. https://doi.org/10.3390/axioms11090481
Huang Z, Li J, Yue H. Study on Comprehensive Evaluation Based on AHP-MADM Model for Patent Value of Balanced Vehicle. Axioms. 2022; 11(9):481. https://doi.org/10.3390/axioms11090481
Chicago/Turabian StyleHuang, Zhili, Jinli Li, and Hongge Yue. 2022. "Study on Comprehensive Evaluation Based on AHP-MADM Model for Patent Value of Balanced Vehicle" Axioms 11, no. 9: 481. https://doi.org/10.3390/axioms11090481